Quaternion
Die Quaternionen (Singular: die Quaternion, von lat. quaternio, -ionis f.
„Vierheit“) sind ein Zahlbereich, der den Zahlbereich der reellen Zahlen erweitert –
ähnlich den komplexen
Zahlen und über diese hinaus. Beschrieben (und systematisch fortentwickelt)
wurden sie seit 1843 von Sir William Rowan Hamilton;
sie werden deshalb auch hamiltonsche Quaternionen oder
Hamilton-Zahlen genannt. Olinde Rodrigues entdeckte sie bereits 1840 unabhängig von Hamilton.[2]
Trotzdem wird die Menge
der Quaternionen meistens mit  bezeichnet.
bezeichnet.
Die Quaternionen bilden einen Schiefkörper
(oder Divisionsring), bei dem die Multiplikation nicht kommutativ ist. Das
heißt, es gibt Quaternionen  und
und  ,
bei denen die beiden Produkte
,
bei denen die beiden Produkte  und
und  von der Reihenfolge der Faktoren abhängen, also
von der Reihenfolge der Faktoren abhängen, also

ist. Einige aus dem Reellen bekannte Rechenregeln gelten deshalb für
Quaternionen nicht, jedoch Assoziativ-
und Distributivgesetz,
sowie multiplikative
Invertierbarkeit, d.h. die Existenz
des Inversen  zu jedem
zu jedem  .
.
Die Quaternionen waren der erste derartige Gegenstand in der Geschichte der Mathematik.
Quaternionen erlauben in vielen Fällen eine rechnerisch elegante Beschreibung des dreidimensionalen euklidischen Raumes und anderer Räume, insbesondere im Kontext von Drehungen. Daher verwendet man sie unter anderem in Berechnungs- und Darstellungsalgorithmen für Simulationen, sowie zur Auswertung kristallographischer Texturen. Sie sind aber auch als eigenständiges mathematisches Objekt von Interesse und dienen so zum Beispiel im Beweis des Vier-Quadrate-Satzes.
Inhaltsverzeichnis
- 2 Schreibweise
- 3 Grundrechenarten
- 4 Grundlegende Begriffe
- 5 Polardarstellung
- 6 Funktionentheorie
- 7 Beschreibung anderer Konstrukte mit Hilfe von Quaternionen
- 8 Die endlichen Untergruppen
- 9 Automorphismen
- 10 Andere Konstruktionen
- 11 Die Quaternionen als Algebra
- 12 Andere Grundkörper
- 13 Anwendungen
- 14 Geschichte
- 15 Verwandte Themen
- 16 Siehe auch
- 17 Literatur
- 18 Quellen
- 20 Anmerkungen
Konstruktion
Die Quaternionen entstehen aus den reellen Zahlen durch Hinzufügen (Adjunktion)
dreier neuer Zahlen, denen in Anlehnung an die komplex-imaginäre Einheit die
Namen  ,
,
 und
und  gegeben werden. So ergibt sich ein vierdimensionales Zahlensystem (mathematisch:
ein Vektorraum) mit einem
Realteil, der aus einer reellen Komponente
besteht, und einem Imaginärteil aus drei Komponenten, der auch
Vektorteil genannt wird.
gegeben werden. So ergibt sich ein vierdimensionales Zahlensystem (mathematisch:
ein Vektorraum) mit einem
Realteil, der aus einer reellen Komponente
besteht, und einem Imaginärteil aus drei Komponenten, der auch
Vektorteil genannt wird.
Jede Quaternion lässt sich eindeutig in der Form
mit reellen Zahlen  ,
,
 ,
,
 ,
,
 schreiben. Damit sind die Elemente
schreiben. Damit sind die Elemente  eine Basis,
die Standardbasis der Quaternionen über
eine Basis,
die Standardbasis der Quaternionen über  .
Die Addition ist komponentenweise und wird vom Vektorraum geerbt. Multiplikativ
werden die neuen Zahlen ,
,
gemäß den Hamilton-Regeln
.
Die Addition ist komponentenweise und wird vom Vektorraum geerbt. Multiplikativ
werden die neuen Zahlen ,
,
gemäß den Hamilton-Regeln

verknüpft. Die Skalarmultiplikation
 ,
die ebenfalls vom Vektorraum geerbt wird[2] und
bei der die Skalare als mit jedem Element vertauschbar angesehen werden,
zusammen mit der Addition, dem Rechtsdistributivgesetz
und den Hamilton-Regeln erlauben es, die Multiplikation von der Basis auf alle
Quaternionen zu erweitern. Da so auch jeder Skalar
,
die ebenfalls vom Vektorraum geerbt wird[2] und
bei der die Skalare als mit jedem Element vertauschbar angesehen werden,
zusammen mit der Addition, dem Rechtsdistributivgesetz
und den Hamilton-Regeln erlauben es, die Multiplikation von der Basis auf alle
Quaternionen zu erweitern. Da so auch jeder Skalar  als
als  in
eingebettet wird, kann
als Unterring
von
aufgefasst werden.
in
eingebettet wird, kann
als Unterring
von
aufgefasst werden.
Die so definierte Multiplikation ist assoziativ,
erfüllt die beiden Distributivgesetze [3]
und macht so die Quaternionen zu einem Ring.
Sie ist allerdings nicht kommutativ,
d.h. für zwei Quaternionen
und
sind die beiden Produkte
und
im Allgemeinen verschieden (s.u.). Das Zentrum
von  ,
also die Menge derjenigen Elemente der multiplikativen Gruppe von ,
die mit allen Elementen kommutieren, ist
,
also die Menge derjenigen Elemente der multiplikativen Gruppe von ,
die mit allen Elementen kommutieren, ist  .
.
Die Quaternionen bilden einen Schiefkörper
(Divisionsring), da es zu jeder Quaternion
eine inverse
Quaternion
gibt mit
 .
.
Wegen der fehlenden Kommutativität werden Notationen mit Bruchstrich, wie
z.B.  ,
vermieden.
,
vermieden.
Des Weiteren sind die Quaternionen eine vierdimensionale
Divisionsalgebra
über
– und bis auf Isomorphie
die einzige.
Schreibweise
Im weiteren Text werden folgende Schreibweisen benutzt:
Ist
eine Quaternion, dann werden ihre (reellen) Komponenten mit  bezeichnet, und diese sind folgendermaßen zugeordnet
bezeichnet, und diese sind folgendermaßen zugeordnet
 .
.
Gelegentlich wird eine vektorielle Schreibweise benötigt. Dabei werden bspw.
die Komponenten  zu einem 3-dimensionalen Vektor
zu einem 3-dimensionalen Vektor  zusammengefasst, so dass man
mit dem 4-dimensionalen Vektor
zusammengefasst, so dass man
mit dem 4-dimensionalen Vektor  identifizieren kann. [4]
identifizieren kann. [4]
Analoge Abmachungen sollen für andere Buchstaben wie
etc. gelten.
In mancher älteren Literatur wurden Quaternionen mit großen Frakturbuchstaben und
die imaginären Einheiten als Einheitsvektoren mit kleinen  in Fraktur bezeichnet, z.B. so:
in Fraktur bezeichnet, z.B. so:

mit  .
.
Grundrechenarten
Die Konstruktion der Quaternionen ist der der komplexen Zahlen analog,
allerdings wird nicht nur eine neue Zahl hinzugefügt, sondern deren drei, die
mit ,
und
bezeichnet werden.

über der Basis  spannen mit reellen Komponenten
spannen mit reellen Komponenten  den 4-dimensionalen Vektorraum der Quaternionen
auf. (Das Basiselement
den 4-dimensionalen Vektorraum der Quaternionen
auf. (Das Basiselement  ,
das zugleich das neutrale Element der Multiplikation darstellt und welches die
reellen Zahlen injektiv
einbettet, wird in der Linearkombination meist weggelassen.) Die Addition und
Subtraktion geschieht komponentenweise wie in jedem Vektorraum. Vom Vektorraum
wird auch die Skalarmultiplikation
übernommen, also die linke und rechte Multiplikation mit einer reellen Zahl, die
distributiv zu jeder Komponente multipliziert wird.
,
das zugleich das neutrale Element der Multiplikation darstellt und welches die
reellen Zahlen injektiv
einbettet, wird in der Linearkombination meist weggelassen.) Die Addition und
Subtraktion geschieht komponentenweise wie in jedem Vektorraum. Vom Vektorraum
wird auch die Skalarmultiplikation
übernommen, also die linke und rechte Multiplikation mit einer reellen Zahl, die
distributiv zu jeder Komponente multipliziert wird.
Diese Skalarmultiplikation ist eine Einschränkung
der Hamilton-Multiplikation, die auf ganz
definiert ist. Die Hamilton-Multiplikation der Basiselemente untereinander oder
etwas umfassender innerhalb der Menge

geschieht nach den Hamilton-Regeln
|
|
 |
|
|
 |
|
|
 |



die zusammen mit der Vertauschbarkeit von  mit jedem anderen Element eine vollständige Tafel für eine Verknüpfung
ausmachen, die sich als assoziativ
erweist und
mit jedem anderen Element eine vollständige Tafel für eine Verknüpfung
ausmachen, die sich als assoziativ
erweist und  zu einer Gruppe
macht – der Quaternionengruppe.
zu einer Gruppe
macht – der Quaternionengruppe.
Unter Voraussetzung der Regel
(und der Gruppenaxiome) sind die anderen beiden
und,
in denen sich u.a. das zyklische bzw. anti-zyklische
Verhalten der drei nicht-reellen Quaternionen-Einheiten ausdrückt, äquivalent zu
der Kurzform
|
|
 [5] [5] |

Mithilfe dieser Ersetzungsregeln, dem Assoziativgesetz
und (linkem wie rechtem) Distributivgesetz
lässt sich die Multiplikation auf ganz
fortsetzen. Die  kann man wie anti-kommutierende
Variablen behandeln. Treten Produkte von zweien von ihnen auf, so darf man sie
nach den Hamilton-Regeln ersetzen.
kann man wie anti-kommutierende
Variablen behandeln. Treten Produkte von zweien von ihnen auf, so darf man sie
nach den Hamilton-Regeln ersetzen.
Die ausgearbeiteten Formeln für die 2 Verknüpfungen von zwei Quaternionen
-
und

lauten
|
|
 |
(Addition) | |
|
|
 | ||
 | |||
 | |||
 |
(Multiplikation)[6] |


Hiermit sind die für einen Ring erforderlichen 2 Verknüpfungen definiert. Es ist leicht nachgerechnet, dass alle Ring-Axiome erfüllt sind.
Das additive Inverse ist (wie in jedem Vektorraum) das Produkt mit dem Skalar –1. Die Subtraktion ist die Addition dieses Inversen.
Die für einen Schiefkörper erforderliche Division muss wegen der fehlenden Kommutativität durch eine Multiplikation mit dem (multiplikativen) Inversen ersetzt werden (siehe Inverses und Division).[7]
Grundlegende Begriffe
Skalarteil und Vektorteil
Aufgrund der besonderen Stellung der Komponente
einer Quaternion
bezeichnet man sie – wie bei den komplexen Zahlen – als Realteil oder Skalarteil
 ,
,
während die Komponenten  zusammen den Imaginärteil oder Vektorteil
zusammen den Imaginärteil oder Vektorteil

bilden. Häufig identifiziert man den Vektorteil auch mit dem Vektor
 .
.
Konjugation
Zu jeder Quaternion
ist die konjugierte Quaternion definiert als
 .
.
Da hier der Imaginärteil mit seinen Einheitsvektoren verknüpft bleibt und der Realteil als reelle Zahl eindeutig in die Quaternionen einzubetten ist, ergeben sich die einfachen Beziehungen

und
 ,
,
aus denen sich unmittelbar

und

ausrechnet.[8]
Ist eine Quaternion gleich ihrer Konjugierten, so ist sie reell, d.h. der Vektorteil ist null. Ist eine Quaternion gleich dem Negativen ihrer Konjugierten, so ist sie eine reine Quaternion, d.h. der Skalarteil ist null.
Weitere wichtige Eigenschaften der Konjugation sind:
|
|
Die Konjugation ist eine Involution. |
|
Die Konjugation ist |
|
|
Die Konjugation ist ein involutiver Antiautomorphismus. |
|
|
Die Konjugation lässt sich „mit arithmetischen Mitteln“ darstellen.[9] |

 und
und für reelle Zahlen
für reelle Zahlen 

Skalarprodukt
Das Skalarprodukt
 zweier Quaternionen, aufgefasst als Vektoren im
zweier Quaternionen, aufgefasst als Vektoren im  ,
ist definiert durch:
,
ist definiert durch:
 .
.
Es ist eine positiv definite symmetrische Bilinearform, über die sich Norm und Betrag definieren lassen und mit der Winkel und Orthogonalität bestimmt werden können.
Ferner kann man damit die einzelnen Komponenten einer Quaternion isolieren:
 .
.
Im Folgenden sei das Skalarprodukt, und zwar sowohl das 4- wie das
3-dimensionale – wie in der Physik üblich – mit dem Mittepunkt  notiert.
notiert.
Kreuzprodukt
Das Kreuzprodukt zweier Quaternionen  ist das Kreuzprodukt
(Vektorprodukt) ihrer Vektorteile und bis auf den Faktor 2 ihr Kommutator. Ist
ist das Kreuzprodukt
(Vektorprodukt) ihrer Vektorteile und bis auf den Faktor 2 ihr Kommutator. Ist
 und
und  ,
so ist
,
so ist

Quaternionenmultiplikation als Skalar- und Kreuzprodukt
Identifiziert man Quaternionen
|
|
und |
|
mit Paaren aus einem Skalar  und einem Vektor
und einem Vektor 
|
bzw. |
|
 mit
mit 
 mit
mit  ,
,so lässt sich die Multiplikation mithilfe des (dreidimensionalen) Skalarprodukts und Kreuzprodukts beschreiben:
 .
.
Zwei Quaternionen sind demnach genau dann miteinander vertauschbar, wenn ihr Kreuzprodukt 0 ist, wenn also ihre Vektorteile als reelle Vektoren linear abhängig sind (s.a. Einbettung der komplexen Zahlen).
Norm und Betrag
Das Skalarprodukt einer Quaternion
mit sich selbst, welches gleich dem Quaternionenprodukt mit der Konjugierten
ist, wird Norm genannt:
 .[10]
.[10]
Insbesondere ist dieser Wert reell und nichtnegativ.
Die Quadratwurzel hieraus

wird Betrag oder Länge der Quaternion
genannt und stimmt überein mit Betrag oder euklidischer
Länge des Vektors  .
Er erfüllt die wichtige Eigenschaft
.
Er erfüllt die wichtige Eigenschaft
 ,
,
die Multiplikativität des Betrags. Mit dem Betrag werden die Quaternionen zu einer reellen Banachalgebra.
Inverses und Division
Bei einer nicht-kommutativen Multiplikation muss man die Gleichungen
|
|
und |
|


unterscheiden. Wenn das Inverse
 existiert, dann sind
existiert, dann sind
|
|
bzw. |
|


respektive Lösungen, die nur dann übereinstimmen, wenn  und
und  kommutieren, insbesondere wenn der Divisor
reell ist. In solch einem Fall kann die Schreibweise
kommutieren, insbesondere wenn der Divisor
reell ist. In solch einem Fall kann die Schreibweise  verwendet werden – bei allgemeinen Divisionen wäre sie nicht eindeutig.
verwendet werden – bei allgemeinen Divisionen wäre sie nicht eindeutig.
Wenn zusätzlich  existiert, gilt die Formel
existiert, gilt die Formel
 ,
,
denn
 und
und  .
.
Für

ist die Norm

reell und positiv. Die Quaternion

erfüllt dann die Bedingungen des Rechts-

und des Links-Inversen

und kann deshalb als das Inverse schlechthin von
bezeichnet werden.
Reine Quaternion
Eine Quaternion, deren Vektorteil 0 ist, wird mit der ihrem Skalarteil entsprechenden reellen Zahl identifiziert.
Eine Quaternion, deren Realteil 0 ist, nennt man reine Quaternion (auch: rein imaginär oder vektoriell). Reine Quaternionen lassen sich auch als diejenigen Quaternionen charakterisieren, deren Quadrat reell und nichtpositiv ist. Für die Menge der reinen Quaternionen schreibt man
 .
.
Sie ist ein dreidimensionaler
reeller Vektorraum mit Basis
 .
.
Für reine Quaternionen nimmt die Multiplikation eine besonders einfache Form an:
 .
.
Einheitsquaternion
Eine Einheitsquaternion (auch: normierte Quaternion, Quaternion der Länge 1) ist eine Quaternion, deren Betrag gleich 1 ist. Für sie gilt (analog zu den komplexen Zahlen)
 .
.
Für eine beliebige Quaternion
ist

eine Einheitsquaternion, die man manchmal auch als das Signum von
bezeichnet.
Das Produkt zweier Einheitsquaternionen und die Inverse einer Einheitsquaternion sind wieder Einheitsquaternionen. Die Einheitsquaternionen bilden also eine Gruppe.
Geometrisch kann man die Menge der Einheitsquaternionen als die Einheits-3-Sphäre
 im vierdimensionalen euklidischen
Raum und damit als Lie-Gruppe
interpretieren, mit dem Raum der reinen
Quaternionen als zugehöriger Lie-Algebra.
Die Darstellung als komplexe
Matrizen verdeutlicht die umkehrbar eindeutige Entsprechung der
Einheitsquaternionen mit der speziellen
unitären Gruppe
im vierdimensionalen euklidischen
Raum und damit als Lie-Gruppe
interpretieren, mit dem Raum der reinen
Quaternionen als zugehöriger Lie-Algebra.
Die Darstellung als komplexe
Matrizen verdeutlicht die umkehrbar eindeutige Entsprechung der
Einheitsquaternionen mit der speziellen
unitären Gruppe  .
.
Die einzigen reellen Einheitsquaternionen sind .
Sie machen auch das Zentrum
von
aus.
Reine Einheitsquaternion
Einheitsquaternionen, die auch reine Quaternionen sind, lassen sich als
diejenigen Quaternionen charakterisieren, deren Quadrate  ergeben:
ergeben:
 .[11]
.[11]
Sie liegen auf dem Rand und in der Äquatorhyperebene der 3-Sphäre
und machen die Einheits-2-Sphäre  des dreidimensionalen Raums
des dreidimensionalen Raums  aus.
aus.
Einbettung der komplexen Zahlen
Jede Quaternion  mit Quadrat
definiert einen Einbettungsisomorphismus
mit Quadrat
definiert einen Einbettungsisomorphismus
 der komplexen Zahlen in die Quaternionen
der komplexen Zahlen in die Quaternionen

mit  und
und  als imaginärer Einheit der komplexen Zahlen. Dabei sind die Bildmengen der
und
als imaginärer Einheit der komplexen Zahlen. Dabei sind die Bildmengen der
und  entsprechenden Einbettungen identisch:
entsprechenden Einbettungen identisch:  .
.
Eine jede solche Quaternion darf
genannt werden, eine senkrechte dazu
und ihr Produkt .[12]
Jede nicht-reelle Quaternion liegt in genau einer solchen Einbettung von
 .
Zwei Quaternionen sind genau dann vertauschbar, wenn es eine gemeinsame
Einbettung gibt.
.
Zwei Quaternionen sind genau dann vertauschbar, wenn es eine gemeinsame
Einbettung gibt.
Zwei verschiedene Bilder haben die reelle Achse zum Durchschnitt.
So betrachtet, sind die Quaternionen eine Vereinigung komplexer Ebenen.
Polardarstellung
Jede Einheitsquaternion
 kann auf eindeutige Weise in der Form
kann auf eindeutige Weise in der Form

- mit dem Polarwinkel[13]
von

- und der reinen Einheitsquaternion
- mit dem Polarwinkel[13]
von
![\phi := \arccos(q_0) = \arccos(\operatorname{Re} q) \in{]0,\pi[}](/svg/15e96a2f40743c6ada1875bad133be34cd7a6070.svg)

dargestellt werden.
Mit der verallgemeinerten
Exponentialfunktion lässt sich dies wegen  auch schreiben als
auch schreiben als

mit der reinen Quaternion  .
Will man also eine reine
Quaternion
.
Will man also eine reine
Quaternion  exponentiieren, so ist
exponentiieren, so ist  und die reine
Einheitsquaternion
und die reine
Einheitsquaternion  zu bilden, und es ergibt sich die Einheitsquaternion
zu bilden, und es ergibt sich die Einheitsquaternion
 .
.
Der Fall  lässt sich stetig
ergänzen. Damit ist die Exponentialabbildung
lässt sich stetig
ergänzen. Damit ist die Exponentialabbildung
 surjektiv
– und bijektiv
surjektiv
– und bijektiv
 bei Einschränkung
auf
bei Einschränkung
auf  ,
denn es ist
,
denn es ist  für unendlich viele
für unendlich viele  mit
mit  .
Sie ist stetig, wegen der
Nicht-Kommutativität der Multiplikation aber kein Homomorphismus[14].
.
Sie ist stetig, wegen der
Nicht-Kommutativität der Multiplikation aber kein Homomorphismus[14].
Allgemein lässt sich jede nicht-reelle Quaternion eindeutig in der Form

- mit dem Polarwinkel von
- und der reinen Einheitsquaternion (der reinen und normierten
Quaternion von )
- mit dem Polarwinkel von
![\phi = \arccos \left(\frac{\operatorname{Re} x}{|x|}\right) \in{]0,\pi[}](/svg/148ed5faa58172d2242beab1ebeaa6c501bf045d.svg)

schreiben. Durch die Festlegung ![\phi \in{]0,\pi[}](/svg/6b47ff9350f303d8004ddfc61fcdb506661d7b11.svg) ist
ist  ,
so dass
in dieselbe Richtung wie der Vektorteil
,
so dass
in dieselbe Richtung wie der Vektorteil  zeigt.
zeigt.
Jede nicht reell-negative Quaternion schreibt sich eindeutig als

mit einer reinen Quaternion
mit .
Diese Darstellungen sind der Polarform komplexer Zahlen

(mit
als imaginärer Einheit) analog. Für die Funktionalgleichung

müssen
allerdings kommutieren [14].
[15]
Funktionentheorie
Exponentialfunktion, Logarithmus
Das Exponential einer nicht-reellen Quaternion
ist:

mit  .
.
Der (natürliche) Logarithmus einer nicht-reellen Quaternion
ist:
 .
.
Für nicht-reelles
sind sie Umkehrfunktionen
voneinander

und, falls  ,
,
 .
.
Für nicht-reelles, mit
kommutierendes
gelten die Funktionalgleichungen

und
 ,
,
letzteres für
mit hinreichend kleinem Imaginärteil.
Fortsetzungen komplexer Funktionen
 und
und  auf
auf  vertragen.
vertragen.Da
als eine Vereinigung von Einbettungen komplexer Ebenen aufgefasst werden kann
(s. Abschnitt #Einbettung
der komplexen Zahlen), kann man versuchen, Funktionen  [16]
mithilfe der genannten Einbettungsisomorphismen
vom Komplexen ins Quaternionische zu liften. Dabei ist zu fordern, dass die so
gewonnenen Funktionen
[16]
mithilfe der genannten Einbettungsisomorphismen
vom Komplexen ins Quaternionische zu liften. Dabei ist zu fordern, dass die so
gewonnenen Funktionen  mit
mit  bei Überschneidungen der Definitionsbereiche
dasselbe Ergebnis liefern, so dass die vereinigte Funktion
bei Überschneidungen der Definitionsbereiche
dasselbe Ergebnis liefern, so dass die vereinigte Funktion  auf der Vereinigungsmenge
auf der Vereinigungsmenge
 vermöge
vermöge  als
als  in wohldefinierter
Weise gebildet werden kann.
in wohldefinierter
Weise gebildet werden kann.
Sei  eine komplexwertige Funktion
eine komplexwertige Funktion  einer komplexen Variablen
einer komplexen Variablen  mit reellen
mit reellen  und reellen
und reellen  .
.
Einbettbarkeit:
 ist genau dann einbettbar in die Quaternionen, wenn
ist genau dann einbettbar in die Quaternionen, wenn  eine gerade
und
eine gerade
und  eine ungerade
Funktion von
eine ungerade
Funktion von  ist.>
ist.>
Beweis: Ist
eine beliebige nicht-reelle Quaternion, dann ist  eine reine und
normierte Quaternion mit
eine reine und
normierte Quaternion mit  .
Seien ferner
.
Seien ferner  und
und  ,
die beide reell sind. Sowohl
wie
,
die beide reell sind. Sowohl
wie  ist ein Einbettungsisomorphismus für das Bild .
Im ersteren Fall ist
ist ein Einbettungsisomorphismus für das Bild .
Im ersteren Fall ist  das Urbild von
das Urbild von  ,
im zweiten Fall haben wir wegen
,
im zweiten Fall haben wir wegen  das Urbild
das Urbild  ;
jeweils mit
als der imaginären Einheit von .
Die Urbilder sind verschieden, das Bild, das bei der zu bildenden Funktion
als Argument fungieren soll, ist aber beidesmal .
;
jeweils mit
als der imaginären Einheit von .
Die Urbilder sind verschieden, das Bild, das bei der zu bildenden Funktion
als Argument fungieren soll, ist aber beidesmal .
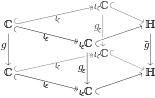
Das „Liften“ wird durch die Einbettung der Funktionswerte als

und

vervollständigt (s. Diagramm). Nun ist nach Voraussetzung
 ,
,
so dass sich

ergibt und  nicht von der Wahl des Einbettungsisomorphismus abhängt.
nicht von der Wahl des Einbettungsisomorphismus abhängt.
Die Bedingung ist auch notwendig. Denn lässt umgekehrt die Funktion
eine Einbettung  in die Quaternionen zu, so haben wir zu jedem
in die Quaternionen zu, so haben wir zu jedem  eine geeignete reine Einheitsquaternion
mit
eine geeignete reine Einheitsquaternion
mit  und
und
 .
.
Nun hat die konjugierte Einbettung
dasselbe Bild wie ,
somit  dieselbe Definitionsmenge
wie
dieselbe Definitionsmenge
wie  .
Der Funktionswert
.
Der Funktionswert


muss also mit dem vorigen für alle  übereinstimmen. ■
übereinstimmen. ■
Die eingebettete Funktion
stimmt auf allen Teilmengen  mit
überein, kann also als Fortsetzung
von
angesehen werden und, wenn Verwechslungen nicht zu befürchten sind, wird auch
der Funktionsname beibehalten.
mit
überein, kann also als Fortsetzung
von
angesehen werden und, wenn Verwechslungen nicht zu befürchten sind, wird auch
der Funktionsname beibehalten.
Ist
eine einbettbare Funktion, so ist  wegen der Ungeradheit von
in der zweiten Variablen, also
wegen der Ungeradheit von
in der zweiten Variablen, also  und
und  für
für  .
Somit folgt aus der Einbettbarkeit, dass die Einschränkung
aufs Reelle reell ist.[17]
Zu dieser Klasse von komplexen Funktionen gehören Norm und Betrag, aber auch
alle Laurent-Reihen
.
Somit folgt aus der Einbettbarkeit, dass die Einschränkung
aufs Reelle reell ist.[17]
Zu dieser Klasse von komplexen Funktionen gehören Norm und Betrag, aber auch
alle Laurent-Reihen
 mit reellen Koeffizienten
mit reellen Koeffizienten  ,
so die Exponential- und Logarithmusfunktion.
,
so die Exponential- und Logarithmusfunktion.
Nicht zu dieser Klasse gehört bspw. die Funktion  ,
bei der
,
bei der  nicht ungerade ist in .
Gleichwohl ist
nicht ungerade ist in .
Gleichwohl ist  eine wohldefinierte Funktion
eine wohldefinierte Funktion  und eine Fortsetzung von
und eine Fortsetzung von  ,
denn es besteht Übereinstimmung auf der Teilmenge
,
denn es besteht Übereinstimmung auf der Teilmenge  .
.
Analysis
Schwieriger ist es, eine allgemeine quaternionische Analysis mit
Differential- und/oder Integralrechnung aufzustellen. Ein Problem springt
unmittelbar ins Auge: der Begriff des Differenzenquotienten
 ,
der in der reellen wie der komplexen Analysis so erfolgreich ist, muss wegen der
Nicht-Kommutativität als linke und rechte Version definiert werden. Legt
man dann genauso strenge Maßstäbe wie bei der komplexen
Differenzierbarkeit an, dann stellt sich heraus, dass bestenfalls lineare
Funktionen, und zwar
,
der in der reellen wie der komplexen Analysis so erfolgreich ist, muss wegen der
Nicht-Kommutativität als linke und rechte Version definiert werden. Legt
man dann genauso strenge Maßstäbe wie bei der komplexen
Differenzierbarkeit an, dann stellt sich heraus, dass bestenfalls lineare
Funktionen, und zwar  links und
links und  rechts, differenzierbar sind.
Immer definieren lässt sich aber eine Richtungsableitung
und das Gâteaux-Differential.
rechts, differenzierbar sind.
Immer definieren lässt sich aber eine Richtungsableitung
und das Gâteaux-Differential.
Ausgehend von den Cauchy-Riemannschen
Differentialgleichungen und dem Satz
von Morera wurde folgender Regularitätsbegriff gefunden: Eine
quaternionische Funktion ist regulär an der Stelle ,
wenn ihr Integral über jeder hinreichend kleinen
umschließenden Hyperfläche
verschwindet.
Beschreibung anderer Konstrukte mit Hilfe von Quaternionen
Minkowski-Skalarprodukt
Das Minkowski-Skalarprodukt
zweier Quaternionen, aufgefasst als Vektoren im Minkowski-Raum, ist der
Skalarteil von :

Vektoranalysis
Im Folgenden werden Vektoren im dreidimensionalen Raum  mit reinen Quaternionen
mit reinen Quaternionen  ,
also die üblichen
,
also die üblichen  -Koordinaten
mit den -Komponenten
identifiziert. Definiert man den Nabla-Operator
(wie Hamilton) als
-Koordinaten
mit den -Komponenten
identifiziert. Definiert man den Nabla-Operator
(wie Hamilton) als

und wendet ihn auf eine skalare Funktion  als (formale) Skalarmultiplikation an, erhält man den Gradienten
als (formale) Skalarmultiplikation an, erhält man den Gradienten

Die Anwendung auf ein Vektorfeld

als (formales) Skalarprodukt ergibt die Divergenz
 .
.
Die Anwendung auf ein Vektorfeld als (formales) Kreuzprodukt ergibt die Rotation
 .
.
Die Anwendung auf ein Vektorfeld als (formales) Produkt zweier reiner Quaternionen ergibt

mit  als Skalarteil und
als Skalarteil und  als Vektorteil der Quaternion.
als Vektorteil der Quaternion.
Zweimalige Anwendung auf eine Funktion  ergibt den Laplace-Operator
ergibt den Laplace-Operator


d.h.  wirkt wie ein Dirac-Operator
als (formale) „Quadratwurzel“ des (negativen) Laplace-Operators.
wirkt wie ein Dirac-Operator
als (formale) „Quadratwurzel“ des (negativen) Laplace-Operators.
Drehungen im dreidimensionalen Raum
Einheitsquaternionen können für eine elegante Beschreibung von Drehungen im dreidimensionalen
Raum verwendet werden: Für eine feste Einheitsquaternion
ist die Abbildung
 bzw.
bzw. 
auf
eine Drehung. (Hier, wie im Folgenden, ist nur von Drehungen die Rede, die den
Ursprung festlassen, d.h. deren Drehachse durch den Ursprung
verläuft.)
Die Polardarstellung
stellt die Einheitsquaternion
durch einen Winkel  und eine reine Einheitsquaternion
eindeutig dar als
und eine reine Einheitsquaternion
eindeutig dar als
 .
.
Dann ist  eine Drehung des
eine Drehung des  um die Achse
um die Achse  mit Drehwinkel
mit Drehwinkel  .
.
Für jede Einheitsquaternion
definieren
und  dieselbe Drehung; insbesondere entsprechen
dieselbe Drehung; insbesondere entsprechen  und
beide der identischen Abbildung (Drehung mit Drehwinkel 0). Im Unterschied
zur Beschreibung von Drehungen durch orthogonale
Matrizen handelt es sich also um keine 1:1-Entsprechung, zu jeder Drehung
und
beide der identischen Abbildung (Drehung mit Drehwinkel 0). Im Unterschied
zur Beschreibung von Drehungen durch orthogonale
Matrizen handelt es sich also um keine 1:1-Entsprechung, zu jeder Drehung
 gibt es genau zwei Einheitsquaternionen
mit
gibt es genau zwei Einheitsquaternionen
mit  .
.
Die Hintereinanderausführung von Drehungen entspricht der Multiplikation der Quaternionen, d.h.

Die Umkehrung der Drehrichtung entspricht dem Inversen:

Damit ist die Abbildung

ein Homomorphismus
der Gruppe
der Einheitsquaternionen in die Drehgruppe
 .
Sie ist eine Überlagerung
der ,
und, da ein Bildelement
.
Sie ist eine Überlagerung
der ,
und, da ein Bildelement  genau die zwei Urbilder
genau die zwei Urbilder  hat, zweiblättrig, weshalb der Homomorphismus auch
2:1-Überlagerung(shomomorphismus)[12]
genannt wird. Ferner ist sie universell,
da
hat, zweiblättrig, weshalb der Homomorphismus auch
2:1-Überlagerung(shomomorphismus)[12]
genannt wird. Ferner ist sie universell,
da  einfach
zusammenhängend ist.
einfach
zusammenhängend ist.
Bezug zu orthogonalen Matrizen
Explizit entspricht der Einheitsquaternion  ,
,

mit  und
und  die Drehmatrix
die Drehmatrix

 .[13]
.[13]
Sie bildet eine reine Quaternion
auf  ab.
ab.
Ist umgekehrt die Drehmatrix

gegeben und ist die Spur
 mit
mit  ,
,
dann bewerkstelligt die Quaternion

die Drehung  ,
denn es ist
,
denn es ist  für jede reine Quaternion .
für jede reine Quaternion .
Wenn man die homogen
formulierte Version von  als Eingabematrix nimmt, produziert die gezeigte Lösung mit
als Eingabematrix nimmt, produziert die gezeigte Lösung mit  die Quaternion
die Quaternion  .
Wegen
.
Wegen  kann die Homogenität in den
kann die Homogenität in den  durch die Setzung
durch die Setzung ![d_{00} := \sqrt[3]{\mathrm{det}(D)}](/svg/357c8b289481ac21594f896e0a720468411e567c.svg) aufrechterhalten werden.
aufrechterhalten werden.
Die
hat wie die
über
die Dimension 3. Die 9 Komponenten von  können also nicht alle frei wählbar sein. Da einer jeden Matrix
können also nicht alle frei wählbar sein. Da einer jeden Matrix  eine Quaternion
entspricht, decken die Drehmatrizen
die ganze
ab. Bei
ist
eine Quaternion
entspricht, decken die Drehmatrizen
die ganze
ab. Bei
ist  .
Falls also
wirklich
.
Falls also
wirklich  ,
ist auch
,
ist auch  die Einheitsquaternion zu
die Einheitsquaternion zu  .
.
Bezug zu Eulerwinkeln
Für Eulerwinkel
gibt es verschiedene Konventionen; die folgende Darlegung bezieht sich auf die
Drehung, die man erhält, wenn man zuerst um die  -Achse
um den Winkel
-Achse
um den Winkel  ,
dann um die neue -Achse
um den Winkel
,
dann um die neue -Achse
um den Winkel  und schließlich um die neue -Achse
um den Winkel
und schließlich um die neue -Achse
um den Winkel  dreht, d.i. die sog. „x-Konvention“
(z, x’, z’’) mit allen Winkeln doppelt. Die Einzeldrehungen
entsprechen den Einheitsquaternionen
dreht, d.i. die sog. „x-Konvention“
(z, x’, z’’) mit allen Winkeln doppelt. Die Einzeldrehungen
entsprechen den Einheitsquaternionen

und da jeweils um die mitgedrehten Achsen gedreht wird, ist die Reihenfolge der Komposition umgekehrt. Die Gesamtdrehung entspricht also





Für andere Konventionen ergeben sich ähnliche Formeln.
Die Eulerwinkel zu einer gegebenen Quaternion lassen sich an der zugehörigen Drehmatrix ablesen.
Universelle Überlagerung der Drehgruppe; Spingruppe
Wie im Abschnitt Einheitsquaternionen
gezeigt, gibt es einen durch die Hamiltonschen Zahlen vermittelten Isomorphismus zwischen
der Gruppe
der Einheitsquaternionen und der speziellen
unitären Gruppe .
Diese beiden Gruppen sind isomorph zur Spingruppe  (zur Physik: siehe Spin).
(zur Physik: siehe Spin).
Die 2:1-Überlagerung
liefert also einen Homomorphismus
der Spingruppe
in die Drehgruppe .
Diese Überlagerung ist zweiblättrig und universell,
da  im Gegensatz zur
einfach
zusammenhängend ist. Die natürliche Operation von
auf
im Gegensatz zur
einfach
zusammenhängend ist. Die natürliche Operation von
auf  ist eine sog. Spinordarstellung.
ist eine sog. Spinordarstellung.
Die aus der Quantenmechanik
bekannten sog. Pauli-Matrizen
 stehen in einfacher Beziehung zu den drei Erzeugenden
der .
Dies wird besonders deutlich in der Darstellung als komplexe
Matrizen:
stehen in einfacher Beziehung zu den drei Erzeugenden
der .
Dies wird besonders deutlich in der Darstellung als komplexe
Matrizen:
 ,
,
dabei ist
die imaginäre Einheit der komplexen Zahlen.
Die Pauli-Matrizen haben –1 zur Determinante (sind also keine Quaternionen), sind spurfrei und hermitesch und kommen daher in der Quantenmechanik als messbare Größen in Frage, was sich für die Anwendungen (s. mathematische Struktur der Quantenmechanik) als wichtig erwiesen hat. Einzelheiten sind im Artikel SU(2) dargestellt.
Orthogonale Abbildungen des vierdimensionalen Raumes
Analog zum dreidimensionalen Fall kann man jede orientierungserhaltende
orthogonale Abbildung von
in sich selbst in der Form

für Einheitsquaternionen  beschreiben. Es gilt
beschreiben. Es gilt

Diese Konstruktion liefert eine Überlagerung

mit Kern
 .
.
Die endlichen Untergruppen
Der 2:1-Überlagerungshomomorphismus
 ,
,
der einer Einheitsquaternion
die 3D-Drehung

zuordnet, muss eine endliche Gruppe  von Quaternionen in eine endliche Gruppe
von Quaternionen in eine endliche Gruppe  überführen, die dann eine endliche Drehgruppe im
ist. Man findet zyklische
Gruppen
überführen, die dann eine endliche Drehgruppe im
ist. Man findet zyklische
Gruppen  und Polyedergruppen,
also die Diedergruppen
und Polyedergruppen,
also die Diedergruppen
 (Zählweise
der n-Ecke), die Tetraedergruppe
(Zählweise
der n-Ecke), die Tetraedergruppe
 ,
die Oktaedergruppe
,
die Oktaedergruppe
 und die Ikosaedergruppe
und die Ikosaedergruppe
 .
.
Die Erzeugenden der zyklischen Gruppen sind Einbettungen
von Einheitswurzeln
 .
Die Urbilder der ,
,
,
unter
werden als
.
Die Urbilder der ,
,
,
unter
werden als  ,
,
 ,
,
 ,
,
 bezeichnet und heißen binäre Diedergruppe etc. Für eine Polyedergruppe
bezeichnet und heißen binäre Diedergruppe etc. Für eine Polyedergruppe  also
also  .
.
Die endlichen Gruppen von Quaternionen sind demnach
 :
:
| Gruppe | erzeugt von |
Ordnung | konvexe
Hülle im  bzw.
bzw. |
|
 |
 |
reguläres n-Eck |
|
 |
 |
 ,
bei n=2 zugleich: regulärer
16-Zeller ,
bei n=2 zugleich: regulärer
16-Zeller |
|
 |
 |
regulärer 24-Zeller |
|
 |
 |
 = Dihektaoktokontaoktochor
(288-Zeller)
= Dihektaoktokontaoktochor
(288-Zeller) |
|
 |
 |
regulärer 600-Zeller |
mit
 ,
,
 ,
,
 ,
,
 .
.
Die zyklischen Gruppen
sind in naheliegender Weise Untergruppen von anderen Gruppen. Die Quaternionengruppe
=  ist eine Untergruppe der binären Tetraedergruppe .
Die Automorphismengruppe
von
ist isomorph zur Oktaedergruppe
ist eine Untergruppe der binären Tetraedergruppe .
Die Automorphismengruppe
von
ist isomorph zur Oktaedergruppe  (Symmetrische
Gruppe). Ihre Elemente sind ebenfalls Automorphismen von ,
,
und .
(Symmetrische
Gruppe). Ihre Elemente sind ebenfalls Automorphismen von ,
,
und .
Die konvexen Hüllen sind (bis auf die Fälle ,
bei denen man mit 2 Dimensionen auskommt) 4-Polytope
und haben, da alle Gruppenelemente von der Länge 1 sind, die Einheits-3-Sphäre
als Um-3-Sphäre. Die Ränder dieser
4-Polytope, also die Zellen, sind Ansammlungen von Tetraedern
– bis auf den Fall ,
bei dem es Oktaeder sind. Bei den
regulären unter den konvexen Hüllen ist es klar, dass die Zellen ebenfalls
regulär und zueinander kongruent sind und es eine In-3-Sphäre
gibt, die alle Zellen (an ihrem Mittelpunkt) berührt. Die übrigen, nämlich
und ,
spannen sog. perfekte
4-Polytope auf. Hier sind die Zellen tetragonale
Disphenoide, welche ebenfalls alle zueinander kongruent sind und an ihrem
Mittelpunkt von der In-3-Sphäre berührt werden.
Automorphismen
Ein jeder Ring-Automorphismus
 von
ist ein innerer,
d.h. es gibt eine Quaternion ,
so dass
von
ist ein innerer,
d.h. es gibt eine Quaternion ,
so dass  .
Daraus folgt:
.
Daraus folgt:
- Das Zentrum
bleibt fest, d.h.
 für alle .
für alle . - Man kann sich auf die Einheitsquaternionen
beschränken.
- Ein Automorphismus ändert nicht das Skalarprodukt,
d.h.
 .
. - Die Automorphismen sind genau die winkel- und längentreuen
Drehungen von
aus dem Abschnitt Drehungen
im dreidimensionalen Raum.
- Wegen der Längentreue sind die Automorphismen stetig, somit zusätzlich topologisch.
-
hat das Zentrum
 .
Folglich ist die Automorphismengruppe
.
Folglich ist die Automorphismengruppe
 .
.
Die Konjugation als
Spiegelung an der reellen Achse ist antihomomorph in
der Multiplikation, d.h.  ,
und wird als involutiver
Antiautomorphismus bezeichnet, weil sie zudem eine Involution
ist.
,
und wird als involutiver
Antiautomorphismus bezeichnet, weil sie zudem eine Involution
ist.
Andere Konstruktionen
Matrixdarstellungen
Komplexe Matrizen
Im Ring  der komplexen 2×2-Matrizen bildet man
den von den Elementen
der komplexen 2×2-Matrizen bildet man
den von den Elementen

erzeugten Unterring
 [20],
wobei die imaginäre Einheit der komplexen Zahlen als
kenntlich gemacht ist.[21]
Eine Matrix
[20],
wobei die imaginäre Einheit der komplexen Zahlen als
kenntlich gemacht ist.[21]
Eine Matrix

mit reellen
und komplexen  hat die Determinante
hat die Determinante
 ,
die nur dann 0 ist, wenn
,
die nur dann 0 ist, wenn  .
Somit sind alle von der Nullmatrix
verschiedenen Matrizen invertierbar
– und der Ring
ist ein Schiefkörper.[22]
.
Somit sind alle von der Nullmatrix
verschiedenen Matrizen invertierbar
– und der Ring
ist ein Schiefkörper.[22]
Der so konstruierte Schiefkörper erweist sich als isomorph zu den Quaternionen.
Denn die Abbildung  mit den Zuordnungen
mit den Zuordnungen

ist homomorph in den Verknüpfungen Addition und Multiplikation, wobei letztere der Matrizenmultiplikation zuzuordnen ist. Die konjugierte Quaternion geht auf die adjungierte Matrix und die Norm auf die Determinante. Darüber hinaus ist die Abbildung injektiv und stetig, also topologisch.
Es gibt verschiedene Möglichkeiten für die Einbettung ,
die alle zueinander konjugiert
und homöomorph
sind.[23]
Reelle Matrizen
Ganz analog kann man die Quaternion  auch als reelle 4×4-Matrix
auch als reelle 4×4-Matrix

![{\displaystyle =x_{0}\left[{\begin{smallmatrix}{\begin{array}{rrrr}1&0&0&0\\0&1&0&0\\0&0&1&0\\0&0&0&1\end{array}}\end{smallmatrix}}\right]+x_{1}\left[{\begin{smallmatrix}{\begin{array}{rrrr}0&1&0&0\\-1&0&0&0\\0&0&0&-1\\0&0&1&0\end{array}}\end{smallmatrix}}\right]+x_{2}\left[{\begin{smallmatrix}{\begin{array}{rrrr}0&0&1&0\\0&0&0&1\\-1&0&0&0\\0&-1&0&0\end{array}}\end{smallmatrix}}\right]+x_{3}\left[{\begin{smallmatrix}{\begin{array}{rrrr}0&0&0&1\\0&0&-1&0\\0&1&0&0\\-1&0&0&0\end{array}}\end{smallmatrix}}\right]}](/svg/dd796b78ac931e7f14264a97a23b576b17f8ca16.svg)
schreiben. Die Konjugation der Quaternion entspricht der Transposition der Matrix und der Betrag der vierten Wurzel aus der Determinante.
Das Modell der reellen Matrizen ist bspw. dann vorteilhaft, wenn man eine Software für lineare Algebra mit Schwächen bei den komplexen Zahlen hat.
Quotientenalgebra
Eine elegante, aber zugleich abstrakte Konstruktion stellt der Weg über den
Quotienten des nichtkommutativen
Polynomrings in drei Unbestimmten
dar, deren Bilder
sind, modulo dem Ideal, das von den Hamilton-Regeln erzeugt wird. Alternativ
kommt man auch mit nur zwei Unbestimmten aus.
Auf diese Weise ergibt sich die Quaternionen-Algebra als Clifford-Algebra der
zweidimensionalen, euklidischen Ebene mit Erzeugern  .
Im Zusammenhang mit dreidimensionalen Drehungen ist auch die Interpretation als
der gerade Anteil der Clifford-Algebra des dreidimensionalen, euklidischen
Raumes wichtig. Die Erzeuger werden dann mit
.
Im Zusammenhang mit dreidimensionalen Drehungen ist auch die Interpretation als
der gerade Anteil der Clifford-Algebra des dreidimensionalen, euklidischen
Raumes wichtig. Die Erzeuger werden dann mit  identifiziert.
identifiziert.
Die Quaternionen als Algebra
Es gibt bis auf Isomorphie genau vier endlichdimensionale
-Algebren,
deren Multiplikation ohne Nullteiler
ist, nämlich den Körper
der reellen Zahlen selbst, den Körper
der komplexen Zahlen, den Schiefkörper
der Quaternionen und den Alternativkörper
 der Cayleyschen Oktaven. [24][25]-->[41]
der Cayleyschen Oktaven. [24][25]-->[41]
Das Zentrum
von
ist ;
die Quaternionen sind also eine zentraleinfache
Algebra über .
Reduzierte
Norm
und Spur
sind durch
 bzw.
bzw. 
gegeben.
Beim Basiswechsel
von
zum algebraischen Abschluss
werden die Quaternionen zu einer Matrizenalgebra:

Die komplexe Konjugation auf dem Faktor
des Tensorproduktes
entspricht einer Involution
der Matrizenalgebra. Die Invarianten von ,
d.s. die von
fix gelassenen Elemente
mit  ,
bilden eine zu
isomorphe Algebra. Zur oben angegebenen Matrixdarstellung der Quaternionen als
komplexe
Matrizen passt die Involution
,
bilden eine zu
isomorphe Algebra. Zur oben angegebenen Matrixdarstellung der Quaternionen als
komplexe
Matrizen passt die Involution
 mit
mit  .
.
Die Tatsache, dass die Brauergruppe
von
nur aus zwei Elementen besteht, spiegelt sich auch darin wider, dass

ist.
Allgemein bezeichnet man jede vierdimensionale zentraleinfache Algebra über einem Körper als eine Quaternionenalgebra.
Die Quaternionen sind die Clifford-Algebra
zum Raum
mit einer negativ-definiten
symmetrischen Bilinearform.
Andere Grundkörper
Quaternionen über den rationalen Zahlen
Bei allen obigen Arten
der Konstruktion spielt die Vollständigkeit
des Koeffizientenvorrats keine Rolle. Deshalb kann man (anstatt von den reellen
Zahlen  über
über  zu
zu  )
auch von anderen Grundkörpern, z.B. den rationalen
Zahlen
)
auch von anderen Grundkörpern, z.B. den rationalen
Zahlen  ,
ausgehen, um via gaußsche
Zahlen
,
ausgehen, um via gaußsche
Zahlen  bei den Quaternionen mit rationalen Koeffizienten
bei den Quaternionen mit rationalen Koeffizienten

anzukommen – mit formal denselben Rechenregeln.
Danach kann, falls überhaupt erforderlich, die Vervollständigung
für die Betragsmetrik durchgeführt
werden mit einem Endergebnis isomorph zu .
Insofern kann bei vielen Aussagen
durch ,
 durch
und
durch
durch
und
durch  ersetzt werden.
ersetzt werden.
Da es nach dem Satz
von Wedderburn keinen endlichen Schiefkörper
mit nicht-kommutativer
Multiplikation gibt und
die Dimension
des Vektorraums
über seinem Primkörper
und Zentrum
mit  minimal ist, gehört
als abzählbare
Menge zu den „kleinsten“ Schiefkörpern
mit nicht-kommutativer Multiplikation – auf jeden Fall enthält
keinen kleineren.
minimal ist, gehört
als abzählbare
Menge zu den „kleinsten“ Schiefkörpern
mit nicht-kommutativer Multiplikation – auf jeden Fall enthält
keinen kleineren.
Der Schiefkörper
besitzt einen sog. Ganzheitsring
d.h. eine Untermenge
von Zahlen, genannt Hurwitzquaternionen,
die einen Ring bilden und
zum Quotientenkörper
haben, – ganz ähnlich, wie es sich bei den ganzen Zahlen  und ihrem Quotientenkörper
verhält. In einem solchen Ring lassen sich bspw. Approximationsfragen,
Teilbarkeitsfragen
u.Ä. untersuchen.
und ihrem Quotientenkörper
verhält. In einem solchen Ring lassen sich bspw. Approximationsfragen,
Teilbarkeitsfragen
u.Ä. untersuchen.
Weitere Grundkörper
Auch Körper  eignen sich als Ausgangspunkt zur Bildung nicht-kommutativer Erweiterungskörper
nach Art der Quaternionen. Wichtig ist, dass in
eignen sich als Ausgangspunkt zur Bildung nicht-kommutativer Erweiterungskörper
nach Art der Quaternionen. Wichtig ist, dass in  die Summe aus 4 Quadraten
die Summe aus 4 Quadraten  nur für
nur für  verschwindet. Dann gibt es auch kein
verschwindet. Dann gibt es auch kein  mit
mit  und
und  ist eine echte quadratische Erweiterung,
die eine Konjugation definiert. Diese Bedingungen sind z.B. bei allen formal
reellen Körpern erfüllt.
ist eine echte quadratische Erweiterung,
die eine Konjugation definiert. Diese Bedingungen sind z.B. bei allen formal
reellen Körpern erfüllt.
Aber auch bei Körpern, die nicht angeordnet
werden können, kann die obige Bedingung betreffend die Summe aus 4 Quadraten
erfüllt sein, bspw. im Körper  der 2-adischen
Zahlen. Der so über
gebildete Quaternionenkörper ist isomorph zur Vervollständigung des (oben
beschriebenen) Körpers
der 2-adischen
Zahlen. Der so über
gebildete Quaternionenkörper ist isomorph zur Vervollständigung des (oben
beschriebenen) Körpers  der Quaternionen mit rationalen Koeffizienten für die folgende
(nichtarchimedische diskrete) Bewertung ,
dem 2-Exponenten
der Norm,
der Quaternionen mit rationalen Koeffizienten für die folgende
(nichtarchimedische diskrete) Bewertung ,
dem 2-Exponenten
der Norm,

mit  .
Die Primzahl
.
Die Primzahl  ist die einzige, für die die Quaternionen-Algebra
über
ist die einzige, für die die Quaternionen-Algebra
über  nullteilerfrei
und ein Schiefkörper ist.
nullteilerfrei
und ein Schiefkörper ist.
Anwendungen
Eulerscher Vier-Quadrate-Satz
Die Identität, die aus dem Produkt zweier Summen von vier Quadraten

 | |
 | |
 | |
 |
wieder eine Summe von vier Quadraten macht, gilt universell –
einschließlich aller Varianten, die durch Vorzeichenspiel und Permutation entstehen, – in
jedem Polynomring ![R[x_0,x_1,x_2,x_3,y_0,y_1,y_2,y_3]](/svg/dbf586f6e7290514802ef9891b9607f4e6bee750.svg) über einem kommutativen unitären Ring
und kann im Nachhinein als „Abfallprodukt“ der Multiplikativität des quaternionischen
Betrags angesehen werden. Ihre Entdeckung 1748, also lange vor der
Quaternionenzeit, geht jedoch auf Leonhard
Euler zurück, der mit ihrer Hilfe den 1770 erstmals erbrachten Beweis von Joseph
Louis Lagrange für den lange vermuteten
Vier-Quadrate-Satz
wesentlich vereinfachen konnte.
über einem kommutativen unitären Ring
und kann im Nachhinein als „Abfallprodukt“ der Multiplikativität des quaternionischen
Betrags angesehen werden. Ihre Entdeckung 1748, also lange vor der
Quaternionenzeit, geht jedoch auf Leonhard
Euler zurück, der mit ihrer Hilfe den 1770 erstmals erbrachten Beweis von Joseph
Louis Lagrange für den lange vermuteten
Vier-Quadrate-Satz
wesentlich vereinfachen konnte.
Informatik und Ingenieurwissenschaften
Die Darstellung von Drehungen mithilfe von Quaternionen wird heutzutage im Bereich der interaktiven Computergrafik genutzt, insbesondere bei Computerspielen, sowie bei der Steuerung und Regelung von Satelliten. Bei Verwendung von Quaternionen an Stelle von Drehmatrizen werden etwas weniger Rechenoperationen benötigt. Insbesondere, wenn viele Drehungen miteinander kombiniert (multipliziert) werden, steigt die Verarbeitungsgeschwindigkeit. Des Weiteren werden Quaternionen, neben den Eulerwinkeln, zur Programmierung von Industrierobotern (z.B. ABB) genutzt.
Physik
Durch die Verwendung der Quaternionen kann man in vielen Fällen auf getrennte Gleichungen zur Berechnung von Zeit und Raum verzichten. Dies bietet Vorteile in der Physik, unter anderem in den Gebieten Mechanik, Wellengleichungen, Spezielle Relativitätstheorie und Gravitation, Elektromagnetismus sowie der Quantenmechanik.
Wie im Abschnitt Vektoranalysis werden Vektoren im dreidimensionalen Raum mit reinen Quaternionen identifiziert.
Elektromagnetismus
Die Maxwell-Gleichungen zur Beschreibung des Elektromagnetismus sind der bekannteste Anwendungsfall für Quaternionen. Die Maxwellgleichungen werden durch eine Gruppe von Kommutatoren und Antikommutatoren des Differenzoperators, des elektrischen Feldes E und dem magnetischen Feld B im Vakuum definiert. Im Wesentlichen sind dieses die homogene Maxwellgleichung und das gaußsche Gesetz.
Im Folgenden werden modifizierte Kommutatoren bzw. Antikommutatoren verwendet:

bzw.

und

mit
als (formalen) Quaternionen und diversen formalen Produkten.
Die homogene Maxwellgleichung ist definiert durch:

 .
.
Hierbei besagt  ,
dass keine magnetischen
Monopole existieren.
,
dass keine magnetischen
Monopole existieren.  ist das Faradaysche
Induktionsgesetz.
ist das Faradaysche
Induktionsgesetz.
Das gaußsche Gesetz definiert sich umgekehrt aus:

 .
.
Hierbei ergibt  das gaußsche Gesetz und
das gaußsche Gesetz und  das von Maxwell korrigierte Ampèresche
Durchflutungsgesetz.
das von Maxwell korrigierte Ampèresche
Durchflutungsgesetz.
Elektromagnetisches Viererpotential
Die elektrischen und magnetischen Felder werden häufig als elektromagnetisches Viererpotential (d.h. als 4-wertiger Vektor) ausgedrückt. Dieser Vektor kann auch als Quaternion umformuliert werden.


Das elektrische Feld E ist der Antikommutator des konjugierten, differenzierten Vierpotenzials. Das magnetische Feld B verwendet den Kommutator. Durch diese Darstellungsform kann man direkt in die Maxwellgleichungen einsetzen:



sowie



 .
.
Hierbei sind die Ausdrücke  und
die beiden Quellenfelder,
die durch die Differenz aus zwei Kommutatoren und zwei Antikommutatoren gebildet
werden.
und
die beiden Quellenfelder,
die durch die Differenz aus zwei Kommutatoren und zwei Antikommutatoren gebildet
werden.
Das Induktionsgesetz  und das Durchflutungsgesetz
und das Durchflutungsgesetz  werden durch die Summe aus den zwei ineinanderliegenden Kommutatoren und
Antikommutatoren gebildet.
werden durch die Summe aus den zwei ineinanderliegenden Kommutatoren und
Antikommutatoren gebildet.
Lorentzkraft
Die Lorentzkraft wird auf ähnliche Weise aus den Maxwellgleichungen abgeleitet. Allerdings müssen die Vorzeichen korrigiert werden.


Erhaltungssatz
Der Erhaltungssatz
der elektrischen
Ladung wird durch die Anwendung des konjugierten Differenzoperators auf die
Quellen der Maxwellgleichung gebildet. Mit  sei hier der Real-
oder Skalarteil der Quaternion
bezeichnet. In den Beispielen ist
ein Quaternionenprodukt.
sei hier der Real-
oder Skalarteil der Quaternion
bezeichnet. In den Beispielen ist
ein Quaternionenprodukt.




Diese Gleichung zeigt, dass das Skalarprodukt des elektrischen Feldes
 plus dem Kreuzprodukt des magnetischen Feldes
plus dem Kreuzprodukt des magnetischen Feldes  auf der einen Seite, sowie der Stromdichte
auf der einen Seite, sowie der Stromdichte
 plus der Frequenz der Ladungsdichte
auf der anderen Seite, gleich ist. Dieses bedeutet, dass die Ladung bei der
Umformung erhalten bleibt.
plus der Frequenz der Ladungsdichte
auf der anderen Seite, gleich ist. Dieses bedeutet, dass die Ladung bei der
Umformung erhalten bleibt.
Poyntings
Energieerhaltungssatz
wird in auf dieselbe Weise abgeleitet, mit dem Unterschied, dass statt des
Differentials das konjugierte elektrische Feld
verwendet wird.





Mit den Vektoridentitäten




kann man diese Gleichung nach

umformen, was der Poynting-Gleichung
entspricht. Der Ausdruck  entspricht hierbei dem Poynting-Vektor.
entspricht hierbei dem Poynting-Vektor.
Geschichte
William
Rowan Hamilton hatte 1835 die Konstruktion der komplexen Zahlen als Zahlenpaare angegeben.
Dadurch motiviert, suchte er lange nach einer entsprechenden Struktur auf dem
Raum
der Zahlentripel; heute weiß man, dass keine derartige Struktur existiert. 1843
schließlich gelangte er zu der Erkenntnis, dass es möglich ist, eine
Multiplikation auf der Menge der 4-Tupel
zu konstruieren, wenn man dazu bereit ist, die Kommutativität
aufzugeben. In einem Brief an seinen Sohn gibt er als Datum den 16. Oktober 1843
an und berichtet, er habe sich spontan dazu hinreißen lassen, die
Multiplikationsregeln in einen Stein an der Brougham Bridge (heute Broombridge
Road) in Dublin zu ritzen; später wurde
dort eine Gedenktafel angebracht. Die Rechenregeln für Quaternionen waren in
Ansätzen schon früher bekannt, so findet sich die Formel für den Vier-Quadrate-Satz
bereits bei Leonhard
Euler (1748). Andere, auch allgemeinere Multiplikationsregeln wurden von Hermann Graßmann untersucht (1855).
Schon kurz nach der Entdeckung der Quaternionen fand Hamilton die Darstellung
von Drehungen des Raumes mithilfe von Quaternionen und damit eine erste
Bestätigung der Bedeutung der neuen Struktur; Arthur Cayley entdeckte 1855 die entsprechenden Aussagen über orthogonale
Abbildungen des vierdimensionalen Raumes. Die bloße Parametrisierung der
 -Drehmatrizen
war hingegen schon Euler bekannt. Cayley gab 1858 in der Arbeit, in der er
Matrizen einführte, auch die Möglichkeit der Darstellung von Quaternionen durch
komplexe
-Drehmatrizen
war hingegen schon Euler bekannt. Cayley gab 1858 in der Arbeit, in der er
Matrizen einführte, auch die Möglichkeit der Darstellung von Quaternionen durch
komplexe  -Matrizen
an.
-Matrizen
an.
Hamilton widmete sich fortan ausschließlich dem Studium der Quaternionen; sie wurden in Dublin ein eigenes Examensfach. In seiner Nachfolge wurde 1895 sogar ein „Weltbund zur Förderung der Quaternionen“ gegründet. Der deutsche Mathematiker Felix Klein schreibt rückblickend über diese anfängliche Euphorie:
„Wie ich schon andeutete, schloß sich Hamilton eine Schule an, die ihren Meister an Starrheit und Intoleranz noch überbot. […] Die Quaternionen sind gut und brauchbar an ihrem Platze; sie reichen aber in ihrer Bedeutung an die gewöhnlichen komplexen Zahlen nicht heran. […] Die Leichtigkeit und Eleganz, mit der sich hier die weittragendsten Theoreme ergeben, ist in der Tat überraschend, und es läßt sich wohl von hier aus die alles andere ablehnende Begeisterung der Quaternionisten für ihr System begreifen, die […] nun bald über vernünftige Grenzen hinauswuchs, in einer weder der Mathematik als Ganzem noch der Quaternionentheorie selbst förderlichen Weise. […] Die Verfolgung des angegebenen Weges – der neu sein will, obwohl er tatsächlich nur eine peinlich genaue Übertragung längst bekannter Gedanken auf ein einziges neues Objekt, also durchaus keine geniale Konzeption bedeutet – führt zu allerhand Erweiterungen der bekannten Sätze, die in ihrer Allgemeinheit das Hauptcharakteristikum verlieren und gegenstandslos werden, allenfalls zu Besonderheiten, die ein gewisses Vergnügen gewähren mögen.“
Verwandte Themen
Ähnliche Konstruktionen wie die Quaternionen werden manchmal unter dem Namen „hyperkomplexe Zahlen“ zusammengefasst. Beispielsweise sind die Cayley-Zahlen oder Oktaven ein achtdimensionales Analogon zu den Quaternionen; ihre Multiplikation ist allerdings weder kommutativ noch assoziativ.
Siehe auch
Literatur
- Max Koecher, Reinhold Remmert: Hamiltonsche Quaternionen. In: H.-D. Ebbinghaus et al.: Zahlen. Springer-Verlag, Berlin 1983. ISBN 3-540-12666-X
- John H. Conway, Derek A. Smith: On Quaternios and Octonions, A K Peters Ltd, 2003, ISBN 1-56881-134-9 (englisch)
- Jack B. Kuipers: Quaternions and Rotation Sequences, Princeton University Press, 2002, ISBN 0-691-10298-8 (englisch)
- W. Bolton: Complex Numbers (Mathematics for Engineers), Addison-Wesley, 1996, ISBN 0-582-23741-6 (englisch)
- Andrew J. Hanson: Visualizing Quaternions, Morgan Kaufmann Publishers, 2006, ISBN 0-12-088400-3 (englisch)
- Lew Semjonowitsch Pontrjagin: Verallgemeinerungen der Zahlen, Verlag Harri Deutsch, 1995
- S. Eilenberg and I. Niven: The „fundamental theorem of algebra“ for quaternions. Bull. Amer. Soc. 50(1944), 246-248.
Anmerkungen
- ↑ Bei Gauß findet sich eine Notiz über die Multiplikation und Konjugation von Quadrupeln im Kapitel Mutation des Raumes Carl Friedrich Gauß Werke, Achter Band, Seiten 357-361, König. Gesell. Wissen. Göttingen, 1900, die auf das Jahr 1819 datiert wird. Die Unterschiede zu Hamilton gehen nicht über notationelle Konventionen hinaus.
- ↑ Sie ist nicht mit dem Skalarprodukt zu verwechseln.
- ↑ die wegen der fehlenden Kommutativität in der Multiplikation nicht automatisch auf eines reduziert werden können
- ↑
NB:
wird bei Bedarf genauso als Spaltenvektor eingesetzt.
- ↑
Dasselbe leistet eine jede der 5 alternativen
Kurzformen
 .
.
- ↑
In Gauß' Text aus dem Jahr 1819 a. a. O. sind die
Vorzeichen zwischen rot und grün vertauscht, was der Kurzform
 und einer gespiegelten Orientierung
des Dreibeins
und einer gespiegelten Orientierung
des Dreibeins
 ,
d.h. der Multiplikation
,
d.h. der Multiplikation  im Gegenring
im Gegenring  entspricht. Die Identität
auf der Grundmenge
ist ein Antiisomorphismus und die Konjugation
ein Isomorphismus
entspricht. Die Identität
auf der Grundmenge
ist ein Antiisomorphismus und die Konjugation
ein Isomorphismus
 .
.
Die Nichtkommutativität ist gleichbedeutend mit der Verschiedenheit von
und .
Da beide Ringe die Ringaxiome
der Quaternionen erfüllen, müssen diese „unvollständig“ sein im Sinne Hölders. - ↑
Reelle Faktoren kommutieren mit
und damit mit allen Quaternionen, d.h. es gilt beispielsweise
 oder
oder  sind hier also nicht anwendbar. Sie setzen voraus, dass
sind hier also nicht anwendbar. Sie setzen voraus, dass  gilt.
gilt. - ↑
Im Komplexen gilt dagegen
von der rein-imaginären Komponente, so dass der Imaginärteil eine
reelle Zahl ist. Und es gilt:
- ↑ und damit auch Betrag und die Teilmenge der reellen Zahlen. Bei den komplexen Zahlen gilt dies nicht (s.a. Komplexe Zahl#Körpertheorie und algebraische Geometrie).
- ↑ Viele Autoren setzen jedoch Norm dem Betrag gleich.
- ↑
Den unendlich vielen Nullstellen
des Polynoms
 steht das Fehlen einer Nullstelle beim Polynom
steht das Fehlen einer Nullstelle beim Polynom  vom Grad 1
gegenüber. Letzteres besitzt 2 Monome
vom Grad 1, dem höchsten Grad seiner Monome. In nicht-kommutativen Ringen wird
der Grad des Monoms
vom Grad 1
gegenüber. Letzteres besitzt 2 Monome
vom Grad 1, dem höchsten Grad seiner Monome. In nicht-kommutativen Ringen wird
der Grad des Monoms  mit
mit  zu
definiert, und ein Monom dominiert ein Polynom, wenn es unter allen Monomen
den höchsten Grad hat. Dann ist der Grad des Polynoms auch gleich dem Grad der
dominierenden Monome. Hat ein Polynom über
ein einziges dominierendes Monom von einem Grad > 0, dann hat es
immer eine Nullstelle in .
zu
definiert, und ein Monom dominiert ein Polynom, wenn es unter allen Monomen
den höchsten Grad hat. Dann ist der Grad des Polynoms auch gleich dem Grad der
dominierenden Monome. Hat ein Polynom über
ein einziges dominierendes Monom von einem Grad > 0, dann hat es
immer eine Nullstelle in . - ↑
Conway
a. a. O., Seite 40. Und: Ein Automorphismus
definiert eine solche Einbettung (durch Einschränkung),
die nur eine Einbettung von -Algebren
ist.
ist keine Algebra über .
- ↑
Der Polarwinkel ist das Analogon zum komplexen
Argument
 ,
allerdings ist bei dessen Hauptwert das Signum des Imaginärteils mit hinein
genommen, was sich bei den Quaternionen nicht machen lässt, so dass
,
allerdings ist bei dessen Hauptwert das Signum des Imaginärteils mit hinein
genommen, was sich bei den Quaternionen nicht machen lässt, so dass
 nicht eine einfache Einschränkung
des Polarwinkels ist.
nicht eine einfache Einschränkung
des Polarwinkels ist. - ↑
a
b
Für
 und
und  ist
ist

 .
.
- ↑ Laut Lam a. a. O. Seite 22 mag das Scheitern dieser Funktionalgleichung das größte Hindernis für eine quaternionische Funktionentheorie gewesen sein.
- ↑
Die Überlegungen gelten schon, wenn der
Definitionsbereich von
ein Gebiet
ist.
- ↑
Letzteres ist aber nicht hinreichend, denn die
Funktion
 ist trotz
ist trotz  nicht einbettbar. Sind allerdings die Cauchy-Riemannschen
Differentialgleichungen erfüllt, folgt aus der Ungeradheit von
die Geradheit von ,
jeweils in der zweiten Variablen.
nicht einbettbar. Sind allerdings die Cauchy-Riemannschen
Differentialgleichungen erfüllt, folgt aus der Ungeradheit von
die Geradheit von ,
jeweils in der zweiten Variablen. - ↑ Conway a. a. O., Seite 33
- ↑
zu
siehe Orthogonale
Gruppe#Dreidimensionale Drehungen
- ↑
ein -Vektorraum,
der aber weder -Ideal
noch -Vektorraum
ist, da

- ↑
Die Matrizen
 sind spurfrei
und schiefhermitesch.
sind spurfrei
und schiefhermitesch. - ↑
Nur Matrixringe der Dimensionen 1, 2 und 4 über
sind nullteilerfrei
(siehe auch #Die
Quaternionen als Algebra).
- ↑ Diese Möglichkeiten entsprechen der Vorschaltung eines Automorphismus.
- ↑ Satz von Frobenius (reelle Divisionsalgebren) ( Corollary 6.8 in Chapter iX von Hungerford: Algebra (Springer 1974)
- ↑ Satz von Hurwitz (normierte Divisionsalgebren)
- ↑ Satz von Pontrjagin (1931) in Pontrjagin: Jeder lokalkompakte, zusammenhängende topologische Schiefkörper ist entweder der Körper der reellen Zahlen oder der Körper der komplexen Zahlen oder der Schiefkörper der Quaternionen.
- ↑ a
b
Die Beispiele haben als ersten Operanden
alle einen Differentialoperator, der auf den zweiten Operanden
wirkt. Die Brüche enthalten jedoch mit
 eine unbrauchbare Reihenfolge. Bei den Ausrechnungen ganz rechts kommt immer
vor .
eine unbrauchbare Reihenfolge. Bei den Ausrechnungen ganz rechts kommt immer
vor .








© biancahoegel.de
Datum der letzten Änderung: Jena, den: 03.10. 2022