Polygon
Ein Polygon (von altgriechisch πολυγώνιον polygṓnion ‚Vieleck‘; aus πολύς polýs ‚viel‘ und γωνία gōnía ‚Winkel‘) oder auch Vieleck ist in der elementaren Geometrie eine ebene geometrische Figur, die durch einen geschlossenen Streckenzug gebildet wird.
Ein Polygon ist ein zweidimensionales Polytop.
Ein Polygon erhält man, indem in einer Zeichenebene mindestens drei verschiedene (nicht kollineare) Punkte durch Strecken miteinander verbunden werden. Dabei entsteht ein geschlossener Streckenzug (Polygonzug) mit ebenso vielen Ecken, beispielsweise ein Dreieck (3 Punkte, 3 Strecken) oder ein Viereck (4 Punkte, 4 Strecken).
Die umschlossene Fläche wird oft auch als Polygon bezeichnet, so in der Planimetrie.
Definition und Bezeichnungen
Ein Polygon ist eine Figur, die durch ein Tupel
 von
von  verschiedenen Punkten definiert ist.
verschiedenen Punkten definiert ist.
- Die
Punkte heißen die Eckpunkte oder kurz Ecken des Polygons, ein
Polygon mit
Ecken heißt -Eck
oder (insbesondere in der englischen Literatur) auch -Gon.
- Die Strecken
 und
und  bezeichnet man als Seiten des Polygons.
bezeichnet man als Seiten des Polygons. - Alle Verbindungsstrecken zweier Eckpunkte, die keine Seiten sind, nennt man Diagonalen.
Manchmal werden noch weitere Bedingungen für die Definition eines Polygons vorausgesetzt, die aber formal nicht notwendig sind:
- Ein Polygon hat mindestens drei paarweise voneinander verschiedene Eckpunkte. Das schließt ein „Zweieck“ aus.
- Drei angrenzende Eckpunkte liegen nicht auf einer Geraden. Auch
 ,
,
 ,
,
 und
und  ,
,
gelten dabei als angrenzende Eckpunkte. Das schließt Ecken mit gestrecktem
Winkel aus.
,
,
gelten dabei als angrenzende Eckpunkte. Das schließt Ecken mit gestrecktem
Winkel aus.
Klassifikation
Nach Anzahl der Ecken
Polygone werden typischerweise nach der Zahl der Ecken (Wertigkeit des Polygons) benannt.
Regelmäßiges Polygon
Hat ein Polygon gleiche Seiten und gleiche Innenwinkel, dann wird es als regelmäßiges
Polygon oder reguläres Polygon bezeichnet. Viele regelmäßige Polygone lassen
sich mit Zirkel und Lineal konstruieren (Konstruierbares
Polygon).
Z+L bedeutet: lässt sich mit Zirkel und Lineal konstruieren.
| Ecken | Bezeichnung | Griechisch | Z+L | Besonderheit |
|---|---|---|---|---|
| 1 | Eineck | Monogon | - | Punkt |
| 2 | Zweieck | Digon | - | Strecke |
| 3 | Dreieck | Trigon | ja | 1. Fermatsche
Primzahl 
|
| 4 | Viereck | Tetragon | ja | Quadrat |
| 5 | Fünfeck | Pentagon | ja | 2. Fermatsche
Primzahl 
|
| 6 | Sechseck | Hexagon | ja | |
| 7 | Siebeneck | Heptagon | nein | Näherungskonstruktion möglich |
| 8 | Achteck | Oktogon | ja | englisch octagon |
| 9 | Neuneck | Nonagon | nein | seltener Enneagon, Näherungskonstruktion möglich |
| 10 | Zehneck | Dekagon | ja | |
| 11 | Elfeck | Hendekagon | nein | Näherungskonstruktion möglich |
| 12 | Zwölfeck | Dodekagon | ja | |
| 13 | Dreizehneck | Tridekagon | nein | |
| 14 | Vierzehneck | Tetradekagon | nein | |
| 15 | Fünfzehneck | Pentadekagon | ja | |
| 16 | Sechzehneck | Hexadekagon | ja | |
| 17 | Siebzehneck | Heptadekagon | ja | 3. Fermatsche
Primzahl 
|
| 18 | Achtzehneck | Oktodekagon | nein | englisch octadecagon, octakaidecagon |
| 19 | Neunzehneck | Nonadekagon | nein | englisch auch enneadecagon, enneakaidecagon |
| 20 | Zwanzigeck | Ikosagon | ja | |
| 21 | Einundzwanzigeck | Ikosihenagon | nein | |
| 24 | Vierundzwanzigeck | Ikositetragon | ja | |
| 30 | Dreißigeck | Triakontagon | ja | |
| 40 | Vierzigeck | Tetrakontagon | ja | |
| 50 | Fünfzigeck | Pentakontagon | nein | |
| 51 | Einundfünfzigeck | Pentakontahenagon | ja | |
| 60 | Sechzigeck | Hexakontagon | ja | |
| 70 | Siebzigeck | Heptakontagon | nein | |
| 80 | Achtzigeck | Oktokontagon | ja | englisch octacontagon |
| 85 | Fünfundachtzigeck | Oktokontapentagon | ja | englisch octacontapentagon |
| 90 | Neunzigeck | Enneakontagon | nein | |
| 100 | Hunderteck | Hektogon | nein | |
| 257 | 257-Eck | ja | 4. Fermatsche
Primzahl 
| |
| 1.000 | Tausendeck | Chiliagon | ||
| 10.000 | Zehntausendeck | Myriagon | ||
| 65.537 | 65537-Eck | ja | 5. Fermatsche
Primzahl 
| |
| 100.000 | Hunderttausendeck | |||
| 1.000.000 | 1000000-Eck | Megagon | ||
| 4.294.967.295 | 4294967295-Eck | ja | Größte bekannte ungerade Eckenanzahl, die theoretisch mit Zirkel und Lineal konstruierbar ist | |
 |
Googoleck | Googolgon | Eckenzahl: eine 1 mit 100 Nullen | |
| ∞ | Unendlicheck | Apeirogon | Theoretische Grenzform mit unendlich vielen Seiten |
Weitere Typen
- Überschlagenes Polygon
- Schneiden (berühren) sich die Kanten nicht nur in den Eckpunkten, bezeichnet man das Polygon als überschlagen. Liegt keine Selbstüberschneidung vor, bezeichnet man das Polygon als einfach.
- Nicht-überschlagenes Polygon
- Nicht überschlagene Vielecke können konvex (alle Innenwinkel sind kleiner als 180°) oder nichtkonvex (mindestens ein Innenwinkel ist größer als 180°) sein.
- Planares Polygon
- In der Ebene liegendes (planares) Polygon.
- Nicht-planares Polygon
- Im Raum liegendes (nicht-planares) Polygon.
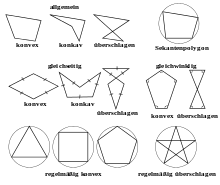
Polygone können gleichseitig oder gleichwinklig sein:
- Regelmäßiges Polygon
- Hat ein Polygon sowohl gleiche Seiten als auch gleiche Innenwinkel, dann wird es als regelmäßiges Polygon oder reguläres Polygon bezeichnet.
- Sternpolygon
- Planare überschlagene reguläre Polygone werden wegen ihres Aussehens auch als Sternpolygone bezeichnet.
- Orthogonales Polygon
- Bei orthogonalen Polygonen treffen alle Kanten im rechten Winkel aufeinander (das heißt, der Innenwinkel beträgt an jeder Kante entweder 90° oder 270°).
Eigenschaften
Winkel
In einem nicht überschlagenen, ebenen -Eck
ist die Summe der Innenwinkel
 .
.
Für die Summe der Außenwinkel gilt dann unabhängig von der Zahl der Ecken
 .
.
Sind darüber hinaus alle Innen- und Außenwinkel gleich groß, so haben diese den Wert
 bzw.
bzw.  .
.
Diagonalen
Für nicht überschlagene Polygone gilt zur Berechnung der Anzahl der Diagonalen folgende Überlegung:
- Jede der
Ecken kann durch eine Strecke mit einer der anderen Ecken verbunden
werden.
- Die Verbindung von Ecke
 zur Ecke
zur Ecke  ist mit der Verbindung von
nach
identisch.
ist mit der Verbindung von
nach
identisch. - Genau
Verbindungen sind Seiten des Polygons.
Also hat ein nicht überschlagenes -Eck
genau  Diagonalen. Bei einem nichtkonvexen Polygon gibt es (im Bereich eines
überstumpfen Innenwinkels) Diagonalen außerhalb des Polygons.
Diagonalen. Bei einem nichtkonvexen Polygon gibt es (im Bereich eines
überstumpfen Innenwinkels) Diagonalen außerhalb des Polygons.
Umfang
Wenn die Eckpunkte eines ebenen einfachen Polygons durch kartesische
Koordinaten  gegeben sind, kann der Umfang des Polygons durch Addition der mit dem Satz des Pythagoras
berechneten Seitenlängen bestimmt werden:
gegeben sind, kann der Umfang des Polygons durch Addition der mit dem Satz des Pythagoras
berechneten Seitenlängen bestimmt werden:

Fläche
Wenn die Eckpunkte eines ebenen einfachen Polygons durch kartesische
Koordinaten
gegeben sind, kann die Fläche des Polygons nach der gaußschen
Trapezformel berechnet werden:
 .
.
Hierbei werden die Indizes, die größer als
sind, immer modulo
betrachtet, das heißt mit  ist
ist  gemeint:
gemeint:

In Determinantenform lautet die gaußsche Trapezformel:

Neben der gaußschen Trapezformel kann die Fläche eines Polygons durch eine vorzeichenbehaftete Summe der Flächeninhalte von Dreiecken berechnet werden, die mit den Kanten des Polygons als Basen und einem festen Punkt (zum Beispiel dem Ursprungspunkt) als Spitze gebildet werden. Die Flächeninhalte der Dreiecke mit einer dem festen Punkt abgewandten Basis (als Kante des Polygons) werden dabei mit negativen Vorzeichen versehen.
Der Flächeninhalt von Gitterpolygonen, deren Ecken alle auf einem Gitter liegen, kann mit dem Satz von Pick berechnet werden.
Algorithmen
Flächeninhalt
Insbesondere für die Programmierung
ist die folgende Darstellung der gaußschen
Trapezformel besonders geeignet, da sich zum Speichern der Koordinaten Arrays anbieten, die
Indizierung von Arrays bei vielen Programmiersprachen
ohnehin bei null beginnt und die Modulo-Funktion somit
besonders elegant zum Einsatz kommen kann. Die Modulo-Funktion ist hier nötig,
um sogenannte Off-by-one-Fehler
bei der Array-Indizierung auszuschließen. Dabei sind ,
 ,
,
 ,
die Koordinaten
der
,
die Koordinaten
der  Eckpunkte des Polygons.
Eckpunkte des Polygons.

Der folgende Programmcode soll eine beispielhafte Implementierung – hier in der Programmiersprache C# – zeigen:
public double berechnePolygonFlaeche(double[] x, double[] y)
{
if ((x == null) || (y == null)) // auf leere Argumente testen
{
return 0.0;
}
int anzahlDerEcken = Math.Min(x.Length, y.Length);
if (anzahlDerEcken < 3) // ein Polygon hat mindestens drei Eckpunkte
{
return 0.0;
}
double flaecheninhalt = 0.0;
// Schleife zwecks Summenbildung
for (int i = 0; i < anzahlDerEcken; i++)
{
// Modulo-Funktion für die Indexe der Koordinaten
flaecheninhalt += (y[i] + y[(i + 1) % anzahlDerEcken]) * (x[i] - x[(i + 1) % anzahlDerEcken]);
}
return Math.Abs(flaecheninhalt / 2.0);
}
Die Koordinaten
der Eckpunkte
sind dabei in den beiden Arrays
x und y gespeichert. Für das Beispiel-5-Eck  ,
das einen Flächeninhalt
von 45 hat, können diese Arrays z.B. wie folgt initialisiert werden:
,
das einen Flächeninhalt
von 45 hat, können diese Arrays z.B. wie folgt initialisiert werden:
double[] x = {7.0, 8.0, 4.0, 1.0, 1.0}; // beispielhafte x-Koordinaten des Polygons
double[] y = {0.0, 7.0, 9.0, 6.0, 2.0}; // beispielhafte y-Koordinaten des Polygons
Konvexe Hülle
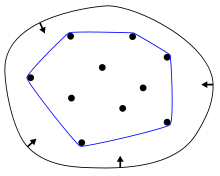
Algorithmen für die
Ermittlung der konvexen
Hülle von
Punkten
in der Ebene haben als untere
Schranke eine asymptotische
Laufzeit
von  .
Der Beweis erfolgt durch Reduktion auf das Sortieren von
Zahlen (Sortierverfahren).
Liegen nur
.
Der Beweis erfolgt durch Reduktion auf das Sortieren von
Zahlen (Sortierverfahren).
Liegen nur  der
Punkte auf dem Rand der konvexen Hülle, ist die Schranke bei
der
Punkte auf dem Rand der konvexen Hülle, ist die Schranke bei  .
.
Es gibt mehrere Algorithmen zur Bestimmung der konvexen Hülle:
- Graham-Scan-Algorithmus
- Gift-Wrapping-Algorithmus
- QuickHull
- Inkrementeller Algorithmus
- Chans Algorithmus
Punkt im Polygon
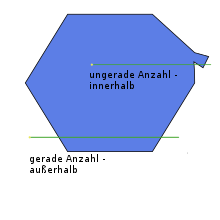
Es gibt einen einfachen Algorithmus, mit dem geprüft werden kann, ob sich ein Punkt innerhalb eines Polygons in der Ebene befindet:
Es wird eine horizontaler Strahl durch den untersuchten Punkt gelegt und untersucht, wie oft sich der Strahl mit den Kanten des Polygons schneidet. Der Punkt befindet sich innerhalb des Polygons, wenn die Anzahl der Schnittpunkte rechts vom Punkt ungerade ist. Wenn die Anzahl gerade ist, befindet sich der Punkt außerhalb.
Das folgende Computerprogramm in der Programmiersprache C# zeigt eine mögliche Implementierung:
// Bestimmt, ob sich ein Punkt mit den Koordinaten (x, y) innerhalb des Polygons befindet
public bool PunktIstInnerhalb(PointF[] ecken, int x, int y)
{
int anzahlDerSchnittpunkte = 0;
int anzahlDerEcken = ecken.Length;
// Ermittelt die Anzahl der Schnittpunkte des Strahls mit den Kanten des Polygons
for (int i = 0; i < anzahlDerEcken; i++)
{
// Die Ecken der untersuchten Kante
PointF ecke1 = ecken[i];
PointF ecke2 = ecken[(i + 1) % anzahlDerEcken];
double x1 = ecke1.X;
double y1 = ecke1.Y;
double x2 = ecke2.X;
double y2 = ecke2.Y;
// Prüft, ob der Strahl die Kante des Polygons schneidet
if (x < x1 && x > x2 || x > x1 && x < x2 && y > (x * y1 - x * y2 - x2 * y1 + x1 * y2) / (x1 - x2))
{
anzahlDerSchnittpunkte++;
}
}
// Wenn die Anzahl ungerade ist, gib true zurück
// Wenn die Anzahl gerade ist, gib false zurück
return anzahlDerSchnittpunkte % 2 == 1; // Modulo-Operation für Division durch 2
}
Verwendung
In der Informatik sind wichtige Approximationen komplexer Polygone die konvexe Hülle und das minimal umgebende Rechteck. In Algorithmen wird oft erst anhand der Approximation auf einen möglichen nichtleeren Schnitt mit einem anderen geometrischen Objekt getestet (oder dieser ausgeschlossen), erst anschließend das ganze Polygon in den Speicher geladen und ein exakter Schnitt berechnet.
In der 3D-Computergrafik werden neben anderen Verfahren der geometrischen Modellierung beliebige (auch gekrümmte) Oberflächen als Polygonnetz modelliert. Dreiecksnetze eignen sich besonders gut zur schnellen Darstellung von Oberflächen, können allerdings nicht so gut durch Subdivision Surfaces interpoliert werden. Zur Speicherung von polygonalen Netzen gibt es eine Reihe bekannter Datenstrukturen.
Beispiele für Polygone im Maschinenbau
Weiterhin wird der Begriff Polygon auch analog für die Verwendung als formschlüssige polygonale Welle-Nabe-Verbindung im Maschinenbau genutzt. Hierbei sind beliebige Polygonprofile denkbar.
Beispiele für Polygone in der Geographie
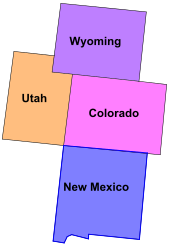
Die Grenzen der US-Bundesstaaten Colorado und Wyoming umranden näherungsweise jeweils ein Rechteck und damit ein konvexes Polygon.
Die Staaten New Mexico und Utah haben jeweils die Form eines konkaven Polygons.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 27.10. 2022