Basis (Vektorraum)
In der linearen Algebra ist eine Basis eine Teilmenge eines Vektorraumes, mit deren Hilfe sich jeder Vektor des Raumes eindeutig als endliche Linearkombination darstellen lässt. Die Koeffizienten dieser Linearkombination heißen die Koordinaten des Vektors bezüglich dieser Basis. Ein Element der Basis heißt Basisvektor. Wenn Verwechslungen mit anderen Basisbegriffen (z.B. der Schauderbasis) zu befürchten sind, nennt man eine solche Teilmenge auch Hamelbasis (nach Georg Hamel). Ein Vektorraum besitzt im Allgemeinen verschiedene Basen, ein Wechsel der Basis erzwingt eine Koordinatentransformation. Die Hamelbasis sollte nicht mit der Basis eines Koordinatensystems verwechselt werden, da diese Begriffe unter bestimmten Bedingungen nicht gleichgesetzt werden können (z.B. bei krummlinigen Koordinaten).
Definition und grundlegende Begriffe
Eine Basis eines Vektorraums  ist eine Teilmenge
ist eine Teilmenge  von
mit folgenden gleichwertigen Eigenschaften:
von
mit folgenden gleichwertigen Eigenschaften:
- Jedes Element von
lässt sich als Linearkombination
von Vektoren aus
darstellen und diese Darstellung ist eindeutig.
-
ist ein minimales Erzeugendensystem
von ,
jeder Vektor aus
lässt sich also als Linearkombination aus
darstellen (
ist lineare
Hülle von )
und diese Eigenschaft gilt nicht mehr, wenn ein Element aus
entfernt wird.
-
ist eine maximale linear
unabhängige Teilmenge von .
Wird also ein weiteres Element aus
zu
hinzugefügt, ist die neue Menge nicht mehr linear unabhängig.
-
ist ein linear unabhängiges Erzeugendensystem von .
Die Elemente einer Basis heißen Basisvektoren. Ist der Vektorraum ein
Funktionenraum, nennt man die Basisvektoren auch Basisfunktionen. Eine Basis
lässt sich mit Hilfe einer Indexmenge
 in der Form
in der Form  beschreiben, eine endliche Basis beispielsweise in der Form
beschreiben, eine endliche Basis beispielsweise in der Form  .
Wird eine solche Indexmenge
benutzt, dann verwendet man jedoch meist zur Bezeichnung der Basis gleich die Familienschreibweise,
d.h.
.
Wird eine solche Indexmenge
benutzt, dann verwendet man jedoch meist zur Bezeichnung der Basis gleich die Familienschreibweise,
d.h.  statt .
statt .
Man beachte, dass in der Familienschreibweise eine Ordnungsrelation auf
der Indexmenge
eine Anordnung der Basisvektoren erzeugt;  heißt dann „geordnete Basis“. Dies macht man sich bei der Beschreibung der Orientierung
von Vektorräumen zunutze. Eine Indexmenge mit Ordnungsrelation ermöglicht es,
unter den Basen Orientierungsklassen (Händigkeit) einzuführen. Beispiele:
abzählbar unendliche Basis
heißt dann „geordnete Basis“. Dies macht man sich bei der Beschreibung der Orientierung
von Vektorräumen zunutze. Eine Indexmenge mit Ordnungsrelation ermöglicht es,
unter den Basen Orientierungsklassen (Händigkeit) einzuführen. Beispiele:
abzählbar unendliche Basis  ,
endliche Basis
,
endliche Basis  .
.
Die Koeffizienten, die in der Darstellung eines Vektors als Linearkombination
von Vektoren aus der Basis
auftreten, nennt man die Koordinaten des Vektors bezüglich .
Diese sind Elemente des dem Vektorraum zugrundeliegenden Körpers  (z.B.
(z.B.  oder
oder  ).
Zusammen bilden diese einen Koordinatenvektor
).
Zusammen bilden diese einen Koordinatenvektor  ,
der allerdings in einem anderen Vektorraum liegt, dem Koordinatenraum
,
der allerdings in einem anderen Vektorraum liegt, dem Koordinatenraum  .
Achtung: Da die Zuordnung der Koordinaten zu ihren jeweiligen Basisvektoren
entscheidend ist, müssen hier – mangels einer gemeinsamen Indexmenge –
die Basisvektoren selbst zur Indizierung herangezogen werden.
.
Achtung: Da die Zuordnung der Koordinaten zu ihren jeweiligen Basisvektoren
entscheidend ist, müssen hier – mangels einer gemeinsamen Indexmenge –
die Basisvektoren selbst zur Indizierung herangezogen werden.
Obwohl Basen meist als Mengen aufgeschrieben werden, ist daher eine durch
eine Indexmenge
gegebene „Indizierung“ praktischer. Die Koordinatenvektoren haben dann die Form
 ,
der Koordinatenraum ist
,
der Koordinatenraum ist  .
Ist
mit einer Ordnungsrelation versehen, so entsteht auch für den Koordinatenvektor
eine Reihenfolge der Koordinaten. Im Beispiel
.
Ist
mit einer Ordnungsrelation versehen, so entsteht auch für den Koordinatenvektor
eine Reihenfolge der Koordinaten. Im Beispiel  ist der Koordinatenvektor von der Form
ist der Koordinatenvektor von der Form  („Nummerierung“ der Koordinaten). Der Koordinatenraum
ist hier
(„Nummerierung“ der Koordinaten). Der Koordinatenraum
ist hier  ,
bei reellen oder komplexen Vektorräumen also
,
bei reellen oder komplexen Vektorräumen also  bzw.
bzw.  .
.
Wichtige Eigenschaften
- Jeder Vektorraum besitzt eine Basis. Ein Beweis für diese Aussage ist im Abschnitt Existenzbeweis angegeben.
- Alle Basen eines Vektorraumes enthalten dieselbe Anzahl von Elementen. Diese Anzahl, die auch eine unendliche Kardinalzahl sein kann, nennt man die Dimension des Vektorraums.
- Eine Teilmenge
 eines -Vektorraumes
definiert eindeutig eine lineare Abbildung
eines -Vektorraumes
definiert eindeutig eine lineare Abbildung  ,
wobei
,
wobei  den
den  -ten
Standardeinheitsvektor
bezeichnet.
-ten
Standardeinheitsvektor
bezeichnet.
- Diese Abbildung ist genau dann
- Diese Charakterisierung überträgt sich auf den allgemeineren Fall von Moduln über Ringen, siehe Basis (Modul).
 linear unabhängig sind;
linear unabhängig sind;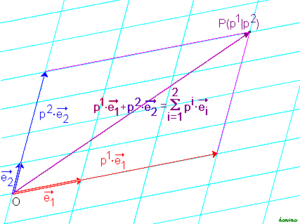
Beispiele
- In der euklidischen
Ebene
 gibt es die so genannte Standardbasis
gibt es die so genannte Standardbasis
 .
Darüber hinaus bilden in dieser Ebene zwei Vektoren genau dann eine Basis,
wenn sie nicht in dieselbe (oder die entgegengesetzte) Richtung
zeigen.
.
Darüber hinaus bilden in dieser Ebene zwei Vektoren genau dann eine Basis,
wenn sie nicht in dieselbe (oder die entgegengesetzte) Richtung
zeigen.
- Die Standardbasis des Vektorraums
ist die Menge der kanonischen Einheitsvektoren
 .
.
- Die Standardbasis im Raum
der Matrizen
 wird durch die Standardmatrizen
gebildet, bei denen genau ein Eintrag
wird durch die Standardmatrizen
gebildet, bei denen genau ein Eintrag  ist und alle anderen Einträge
ist und alle anderen Einträge  sind.
sind.
- Der Nullvektorraum
 hat Dimension null; seine einzige Basis ist die leere
Menge.
hat Dimension null; seine einzige Basis ist die leere
Menge.
- Als -Vektorraum
wird für
meist die Basis
 verwendet. Eine Menge
verwendet. Eine Menge  ist genau dann eine Basis von
über ,
wenn
ist genau dann eine Basis von
über ,
wenn  keine reelle Zahl ist. Als
keine reelle Zahl ist. Als  -Vektorraum
hat
eine Basis, die man aber nicht explizit angeben kann.
-Vektorraum
hat
eine Basis, die man aber nicht explizit angeben kann.
- Der Vektorraum der Polynome
über einem Körper
hat die Basis
 .
Es gibt aber auch viele andere Basen, die zwar umständlicher anzuschreiben
sind, aber in konkreten Anwendungen praktischer sind, zum Beispiel die Legendre-Polynome.
.
Es gibt aber auch viele andere Basen, die zwar umständlicher anzuschreiben
sind, aber in konkreten Anwendungen praktischer sind, zum Beispiel die Legendre-Polynome.
- Im Vektorraum der reellen Zahlenfolgen
bilden die Vektoren
 zwar ein linear unabhängiges System, aber keine Basis, denn es wird zum
Beispiel die Folge
zwar ein linear unabhängiges System, aber keine Basis, denn es wird zum
Beispiel die Folge  nicht davon erzeugt, da eine Kombination unendlich vieler Vektoren keine
Linearkombination ist.
nicht davon erzeugt, da eine Kombination unendlich vieler Vektoren keine
Linearkombination ist.
Beweis der Äquivalenz der Definitionen
Die folgenden Überlegungen skizzieren einen Beweis dafür, dass die vier charakterisierenden Eigenschaften, die in diesem Artikel als Definition des Begriffs Basis genannt werden, äquivalent sind. (Für diesen Beweis wird das Auswahlaxiom oder Lemma von Zorn nicht benötigt.)
- Wenn sich jeder Vektor eindeutig als Linearkombination von Vektoren in
darstellen lässt, dann ist
insbesondere ein Erzeugendensystem (nach Definition).
Wenn
nicht minimales Erzeugendensystem ist, dann gibt es eine echte
Teilmenge  ,
die auch ein Erzeugendensystem ist. Sei nun
,
die auch ein Erzeugendensystem ist. Sei nun  ein Element von ,
welches nicht in
liegt. Dann lässt sich
auf mindestens zwei verschiedene Arten als Linearkombination von Vektoren in
darstellen, nämlich einmal als Linearkombination von Vektoren in
und einmal als
ein Element von ,
welches nicht in
liegt. Dann lässt sich
auf mindestens zwei verschiedene Arten als Linearkombination von Vektoren in
darstellen, nämlich einmal als Linearkombination von Vektoren in
und einmal als  .
Es ergibt sich ein Widerspruch und daher ist
minimal.
.
Es ergibt sich ein Widerspruch und daher ist
minimal.
Also gilt (1) → (2).
- Jedes minimale Erzeugendensystem muss linear unabhängig sein. Denn wenn
nicht linear unabhängig ist, dann gibt es einen Vektor
in ,
welcher sich als Linearkombination von Vektoren in
 darstellen lässt. Dann aber lässt sich jede Linearkombination von Vektoren in
auch durch eine Linearkombination von Vektoren in
umschreiben und
wäre nicht minimal.
darstellen lässt. Dann aber lässt sich jede Linearkombination von Vektoren in
auch durch eine Linearkombination von Vektoren in
umschreiben und
wäre nicht minimal.
Also gilt (2) → (4).
- Jedes linear unabhängige Erzeugendensystem
muss eine maximale linear unabhängige Menge sein. Wäre nämlich
nicht maximal linear unabhängig, so gäbe es ein
(das nicht in
liegt), welches zusammen mit
linear unabhängig wäre. Aber
lässt sich als Linearkombination von Elementen von
darstellen, was der linearen Unabhängigkeit widerspricht.
Also gilt (4) → (3).
- Ein maximal linear unabhängiges System
ist ein Erzeugendensystem: Sei
ein beliebiger Vektor. Wenn
in
enthalten ist, dann lässt sich
als Linearkombination von Elementen von
schreiben. Wenn aber
nicht in
enthalten ist, dann ist die Menge
 eine echte Obermenge von
und damit nicht mehr linear unabhängig. Die Vektoren
eine echte Obermenge von
und damit nicht mehr linear unabhängig. Die Vektoren  ,
die in einer möglichen linearen Abhängigkeit
,
die in einer möglichen linearen Abhängigkeit  vorkommen, können nicht alle aus
sein, daher muss einer davon (sagen wir
vorkommen, können nicht alle aus
sein, daher muss einer davon (sagen wir  )
gleich
sein, mit
)
gleich
sein, mit  ungleich 0. Daher ist
ungleich 0. Daher ist  .
Die Eindeutigkeit dieser Darstellung folgt aus der linearen Unabhängigkeit von
.
.
Die Eindeutigkeit dieser Darstellung folgt aus der linearen Unabhängigkeit von
.
Also gilt (3) → (1).
Existenzbeweis
Mit dem Lemma von Zorn kann man beweisen, dass jeder Vektorraum eine Basis haben muss, auch wenn man sie oft nicht explizit angeben kann.
Sei
ein Vektorraum. Man möchte eine maximale linear unabhängige Teilmenge des
Vektorraums finden. Es liegt also nahe, das Mengensystem

zu betrachten, das durch die Relation  halbgeordnet
wird. Man kann nun zeigen:
halbgeordnet
wird. Man kann nun zeigen:
 ist nicht leer (zum Beispiel enthält
die leere Menge). Besteht
nicht nur aus dem Nullvektor,
dann ist zusätzlich auch jede Einermenge
ist nicht leer (zum Beispiel enthält
die leere Menge). Besteht
nicht nur aus dem Nullvektor,
dann ist zusätzlich auch jede Einermenge  mit
mit  in
und
in
und  ein Element von .
ein Element von .- Für jede Kette
 ist auch
ist auch  in .
in .
Aus dem Lemma von Zorn folgt nun, dass
ein maximales Element hat. Die maximalen Elemente von
sind nun aber genau die maximalen linear unabhängigen Teilmengen von ,
also die Basen von .
Daher hat
eine Basis und es gilt darüber hinaus, dass jede linear unabhängige Teilmenge
von
in einer Basis von
enthalten ist.
Basisergänzungssatz
Ist  eine vorgegebene Menge linear unabhängiger Vektoren und geht man in obigem
Beweis von
eine vorgegebene Menge linear unabhängiger Vektoren und geht man in obigem
Beweis von

aus, so erhält man die Aussage, dass  in einem maximalen Element von
enthalten ist. Da sich ein solches maximales Element wieder als eine Basis von
erweist, ist gezeigt, dass man jede Menge linear unabhängiger Vektoren zu einer
Basis von
ergänzen kann. Diese Aussage nennt man Basisergänzungssatz.
in einem maximalen Element von
enthalten ist. Da sich ein solches maximales Element wieder als eine Basis von
erweist, ist gezeigt, dass man jede Menge linear unabhängiger Vektoren zu einer
Basis von
ergänzen kann. Diese Aussage nennt man Basisergänzungssatz.
Weitere Aussagen über Basen
- Austauschlemma von Steinitz (nach E.
Steinitz): Sind
 eine Basis eines Vektorraumes
und
eine Basis eines Vektorraumes
und  ein weiterer vom Nullvektor verschiedener Vektor aus ,
so kann man einen der Basisvektoren gegen
„austauschen“, d.h., es existiert ein Index
ein weiterer vom Nullvektor verschiedener Vektor aus ,
so kann man einen der Basisvektoren gegen
„austauschen“, d.h., es existiert ein Index  ,
sodass
,
sodass  ebenfalls eine Basis von
ist.
ebenfalls eine Basis von
ist.
Diese Aussage wird häufig benutzt, um zu zeigen, dass alle Basen eines Vektorraumes aus gleich vielen Vektoren bestehen. - Jeder Vektorraum ist ein freies Objekt über seiner Basis. Dies ist eine universelle Eigenschaft von Vektorräumen im Sinne der Kategorientheorie. Konkret heißt dies:
-
- Eine lineare Abbildung eines Vektorraums in einen anderen Vektorraum ist bereits durch die Bilder der Basisvektoren vollständig bestimmt.
- Jede beliebige Abbildung der Basis in den Bildraum definiert eine lineare Abbildung.
- In einem
 -dimensionalen
Vektorraum über einem endlichen
Körper mit
-dimensionalen
Vektorraum über einem endlichen
Körper mit  Elementen gibt es
Elementen gibt es
-
- verschiedene Basen.

Basisbegriffe in speziellen Vektorräumen
Reelle und komplexe Vektorräume tragen meist zusätzliche topologische Struktur. Aus dieser Struktur kann sich ein Basisbegriff ergeben, der vom hier beschriebenen abweicht.
Basis und duale Basis im dreidimensionalen euklidischen Vektorraum
In der klassischen Mechanik wird der Anschauungsraum mit dem drei-dimensionalen euklidischen Vektorraum (V³, ·) modelliert, wodurch dieser eine besondere Relevanz bekommt. Euklidische Vektorräume sind u.a. dadurch definiert, dass es in ihnen ein Skalarprodukt „·“ gibt, wodurch diese Vektorräume besondere und erwähnenswerte Eigenschaften erhalten.
Im dreidimensionalen euklidischen Vektorraum gibt es zu jeder Basis  genau eine duale
Basis
genau eine duale
Basis  ,
sodass mit dem Kronecker-Delta
δ gilt:
,
sodass mit dem Kronecker-Delta
δ gilt:  Bei einer Orthonormalbasis
sind alle Basisvektoren auf Länge eins normiert
und paarweise orthogonal.
Dann stimmen Basis und duale Basis überein.
Bei einer Orthonormalbasis
sind alle Basisvektoren auf Länge eins normiert
und paarweise orthogonal.
Dann stimmen Basis und duale Basis überein.
Jeder Vektor  lässt sich nun als Linearkombination
der Basisvektoren darstellen:
lässt sich nun als Linearkombination
der Basisvektoren darstellen:

Denn die Differenzvektoren von
zu den Vektoren rechts der Gleichheitszeichen sind Nullvektoren.
Der dreidimensionale euklidische Vektorraum ist ein vollständiger Skalarproduktraum.
Hamel- und Schauderbasis in Skalarprodukträumen
Beim Studium von reellen oder komplexen Skalarprodukträumen, besonders von Hilberträumen gibt es noch eine andere, dort zweckmäßigere Art, die Elemente des Raumes darzustellen. Eine Basis besteht dabei aus paarweise orthogonalen Einheitsvektoren, und es werden nicht nur endliche, sondern auch unendliche Summen (sog. Reihen) von Basisvektoren zugelassen. Ein solches vollständiges Orthonormalsystem ist in einem unendlichdimensionalen Raum nie eine Basis im hier definierten Sinn, zur besseren Unterscheidung spricht man auch von Schauderbasis. Der im vorliegenden Artikel beschriebene Basistyp wird zur Unterscheidung auch Hamelbasis genannt.
Auerbachbasen
Eine Auerbachbasis ist eine Hamelbasis für einen dichten Unterraum in einem normierten Vektorraum, sodass der Abstand jedes Basisvektors vom Erzeugnis der übrigen Vektoren gleich seiner Norm ist.
Abgrenzung der Basisbegriffe
- Sowohl eine Hamelbasis als auch eine Schauderbasis ist eine linear unabhängige Menge von Vektoren.
- Eine Hamelbasis oder einfach Basis, wie sie in diesem Artikel beschrieben ist, bildet ein Erzeugendensystem des Vektorraums, d.h., ein beliebiger Vektor des Raums lässt sich als Linearkombination aus endlich vielen Vektoren der Hamelbasis darstellen.
- Bei einem endlichdimensionalen reellen oder komplexen Skalarproduktraum ist eine Orthonormalbasis (d.h. ein minimales Erzeugendensystem aus normierten, zueinander senkrechten Vektoren) zugleich Hamel- und Schauderbasis.
- Bei einem unendlichdimensionalen, vollständigen reellen oder komplexen Skalarproduktraum (speziell also in einem unendlichdimensionalen Hilbertraum) ist eine Schauderbasis nie eine Hamelbasis und umgekehrt. Im unendlichdimensionalen Fall lässt sich eine Hamelbasis häufig nicht einmal orthonormieren.
- Die Hamelbasis eines unendlichdimensionalen, separablen Hilbertraumes
besteht aus überabzählbar vielen Elementen. Eine Schauderbasis hingegen
besteht in diesem Fall aus abzählbar vielen Elementen. Es gibt mithin keinen
Hilbertraum von Hamel-Dimension
 .
. - In Hilberträumen ist mit Basis (ohne Zusatz) meistens eine Schauderbasis gemeint, in Vektorräumen ohne Skalarprodukt immer eine Hamelbasis.
Siehe auch
Literatur
- Peter Knabner, Wolf Barth: Lineare Algebra. Grundlagen und Anwendungen. Springer Spektrum, Berlin/Heidelberg 2013, ISBN 978-3-642-32185-6.
- Uwe Storch, Hartmut Wiebe: Lehrbuch der Mathematik. Band II: Lineare Algebra. BI-Wissenschaft, Mannheim u.a. 1990, ISBN 978-3-411-14101-2.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 16.12. 2020