Basiswechsel (Vektorraum)
Der Basiswechsel oder die Basistransformation ist ein Begriff
aus dem mathematischen
Teilgebiet der linearen
Algebra. Man bezeichnet damit den Übergang zwischen zwei verschiedenen Basen
eines endlichdimensionalen Vektorraums
über einem Körper
 .
Dadurch ändern sich im Allgemeinen die Koordinaten der Vektoren und die Abbildungsmatrizen von
linearen
Abbildungen. Ein Basiswechsel ist somit ein Spezialfall einer Koordinatentransformation.
.
Dadurch ändern sich im Allgemeinen die Koordinaten der Vektoren und die Abbildungsmatrizen von
linearen
Abbildungen. Ein Basiswechsel ist somit ein Spezialfall einer Koordinatentransformation.
Der Basiswechsel kann durch eine Matrix beschrieben werden, die Basiswechselmatrix, Transformationsmatrix oder Übergangsmatrix genannt wird. Mit dieser lassen sich auch die Koordinaten bezüglich der neuen Basis ausrechnen. Stellt man die Basisvektoren der alten Basis als Linearkombinationen der Vektoren der neuen Basis dar, so bilden die Koeffizienten dieser Linearkombinationen die Einträge der Basiswechselmatrix.
Basiswechselmatrix
Es sei  ein
ein  -dimensionaler
Vektorraum über dem Körper
(zum Beispiel dem Körper
-dimensionaler
Vektorraum über dem Körper
(zum Beispiel dem Körper  der reellen Zahlen). In
seien zwei geordnete Basen gegeben,
der reellen Zahlen). In
seien zwei geordnete Basen gegeben,  und
und  .
.
Die Basiswechselmatrix  für den Basiswechsel von
für den Basiswechsel von  nach
nach  ist eine
ist eine  -Matrix.
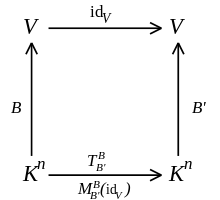
Es handelt sich um die Abbildungsmatrix
der Identitätsabbildung
auf
bezüglich der Basen
im Urbild und
im Bild:
-Matrix.
Es handelt sich um die Abbildungsmatrix
der Identitätsabbildung
auf
bezüglich der Basen
im Urbild und
im Bild:

Man erhält sie, indem man die Vektoren der alten Basis
als Linearkombinationen der Vektoren der neuen Basis  darstellt:
darstellt:

Die Koeffizienten  bilden die
bilden die  -te
Spalte der Basiswechselmatrix
-te
Spalte der Basiswechselmatrix

Diese Matrix ist quadratisch und invertierbar
und somit ein Element der allgemeinen
linearen Gruppe  .
Ihre Inverse
.
Ihre Inverse
 beschreibt den Basiswechsel von
zurück nach .
beschreibt den Basiswechsel von
zurück nach .
Spezialfälle
Ein wichtiger Spezialfall ist der Fall  ,
der Vektorraum stimmt also mit dem Koordinatenraum
überein. In diesem Fall sind die Basisvektoren Spaltenvektoren
,
der Vektorraum stimmt also mit dem Koordinatenraum
überein. In diesem Fall sind die Basisvektoren Spaltenvektoren

die sich zu Matrizen

zusammenfassen lassen, die hier der Einfachheit halber mit den gleichen Buchstaben wie die zugehörigen Basen bezeichnet werden. Die Bedingung
übersetzt sich dann zu

das heißt,

Die Transformationsmatrix
lässt sich somit durch

berechnen, wobei  die inverse
Matrix der Matrix
ist.
die inverse
Matrix der Matrix
ist.
Insbesondere gilt: Ist
die Standardbasis, so gilt
 .
Ist
die Standardbasis, so gilt
.
Ist
die Standardbasis, so gilt  .
.
Wie im Vorangehenden wird hier die Basis
mit der Matrix identifiziert, die man erhält, indem man die Basisvektoren als
Spaltenvektoren schreibt und diese zu einer Matrix zusammenfasst.
Koordinatentransformation
Ein Vektor  habe bezüglich der Basis
habe bezüglich der Basis  die Koordinaten
die Koordinaten  ,
d.h.
,
d.h.

und bezüglich der neuen Basis  die Koordinaten
die Koordinaten  ,
also
,
also

Stellt man wie oben die Vektoren  der alten Basis als Linearkombination der neuen Basis dar, so erhält man
der alten Basis als Linearkombination der neuen Basis dar, so erhält man

Dabei sind die  die oben definierten Einträge der Basiswechselmatrix .
Durch Koeffizientenvergleich erhält man
die oben definierten Einträge der Basiswechselmatrix .
Durch Koeffizientenvergleich erhält man

bzw. in Matrizenschreibweise:

oder kurz:

Basiswechsel bei Abbildungsmatrizen
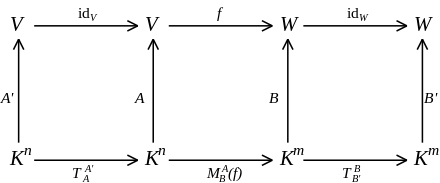
Die Darstellungsmatrix einer linearen Abbildung hängt von der Wahl der Basen im Urbild- und im Zielraum ab. Wählt man andere Basen, so erhält man auch andere Abbildungsmatrizen.
 wird hier die lineare Abbildung von
wird hier die lineare Abbildung von  nach
bezeichnet, die
nach
bezeichnet, die  auf
auf  abbildet, etc.
abbildet, etc.Seien
ein -dimensionaler
und  ein
ein  -dimensionaler
Vektorraum über
und
-dimensionaler
Vektorraum über
und  eine lineare Abbildung. In
seien die geordneten Basen
eine lineare Abbildung. In
seien die geordneten Basen  und
und  gegeben, in
die geordneten Basen
gegeben, in
die geordneten Basen  und
und  .
Dann gilt für die Darstellungsmatrizen von
.
Dann gilt für die Darstellungsmatrizen von  bezüglich
und
bzw. bezüglich
bezüglich
und
bzw. bezüglich  und :
und :

Man erhält diese Darstellung, indem man

schreibt. Die Abbildungsmatrix der Verkettung ist dann das Matrizenprodukt der
einzelnen Abbildungsmatrizen, wenn die Basen passend gewählt sind, das heißt:
die Basis
im Urbild von  ,
die Basis
im Bild von
und im Urbild von ,
die Basis
im Bild von
und im Urbild von
,
die Basis
im Bild von
und im Urbild von ,
die Basis
im Bild von
und im Urbild von  ,
und die Basis
im Bild von .
Man erhält also:
,
und die Basis
im Bild von .
Man erhält also:

Ein wichtiger Spezialfall ist, wenn  ein Endomorphismus
ist und im Urbild und Bild jeweils dieselbe Basis
bzw.
benutzt wird. Dann gilt:
ein Endomorphismus
ist und im Urbild und Bild jeweils dieselbe Basis
bzw.
benutzt wird. Dann gilt:

Setzt man  ,
so gilt also
,
so gilt also

Die Abbildungsmatrizen  und
und  sind also ähnlich.
sind also ähnlich.
Beispiel
Wir betrachten zwei Basen  und
und  des
des  mit
mit

und

wobei die Koordinatendarstellung der Vektoren die Vektoren bezüglich der Standardbasis beschreibt.
Die Transformation der Koordinaten eines Vektors

ergibt sich durch die Darstellung der alten Basisvektoren  bezüglich der neuen Basis
bezüglich der neuen Basis  und deren Gewichtung mit
und deren Gewichtung mit  .
.
Um die Matrix der Basistransformation  von
nach
zu berechnen, müssen wir die drei linearen
Gleichungssysteme
von
nach
zu berechnen, müssen wir die drei linearen
Gleichungssysteme

nach den 9 Unbekannten
auflösen.
Dies kann mit dem Gauß-Jordan-Algorithmus für alle drei Gleichungssysteme simultan erfolgen. Dazu wird folgendes lineares Gleichungssystem aufgestellt:

Durch Umformen mit elementaren Zeilenoperationen lässt sich die linke Seite auf die Einheitsmatrix bringen und auf der rechten Seite erhält man als Lösung des Systems die Transformationsmatrix
 .
.
Wir betrachten den Vektor  ,
also den Vektor der bezüglich der Basis
die Koordinaten
,
also den Vektor der bezüglich der Basis
die Koordinaten

besitzt. Um nun die Koordinaten bezüglich
zu berechnen, müssen wir die Transformationsmatrix
mit diesem Spaltenvektor multiplizieren:
 .
.
Also ist  .
.
In der Tat rechnet man als Probe leicht nach, dass

gilt.
Basiswechsel mit Hilfe der dualen Basis
Im wichtigen und anschaulichen Spezialfall des euklidischen
Vektorraums (V, ·) kann der Basiswechsel elegant mit der dualen Basis  einer Basis
einer Basis  durchgeführt werden. Für die Basisvektoren gilt dann
durchgeführt werden. Für die Basisvektoren gilt dann

mit dem Kronecker-Delta
 .
Skalare Multiplikation eines Vektors
.
Skalare Multiplikation eines Vektors  mit den Basisvektoren
mit den Basisvektoren  ,
Multiplikation dieser Skalarprodukte mit den Basisvektoren
,
Multiplikation dieser Skalarprodukte mit den Basisvektoren  und Addition aller Gleichungen ergibt einen Vektor
und Addition aller Gleichungen ergibt einen Vektor  Hier wie im Folgenden ist die Einsteinsche
Summenkonvention anzuwenden, der zufolge über in einem Produkt doppelt
vorkommende Indizes, im vorhergehenden Satz beispielsweise nur
Hier wie im Folgenden ist die Einsteinsche
Summenkonvention anzuwenden, der zufolge über in einem Produkt doppelt
vorkommende Indizes, im vorhergehenden Satz beispielsweise nur  ,
von eins bis
zu summieren ist. Skalare Multiplikation von
,
von eins bis
zu summieren ist. Skalare Multiplikation von  mit irgendeinem Basisvektor
mit irgendeinem Basisvektor  ergibt wegen
ergibt wegen

dasselbe Ergebnis wie die skalare Multiplikation von
mit diesem Basisvektor, weswegen die beiden Vektoren identisch sind:

Analog zeigt sich:

Dieser Zusammenhang zwischen den Basisvektoren und einem Vektor, seinen Komponenten und Koordinaten, gilt für jeden Vektor im gegebenen Vektorraum.
Wechsel zur dualen Basis
Skalare Multiplikation beider Gleichungen mit
liefert  oder
oder

Die Umkehroperation mit  ist
ist

Für die oben benutzten Skalarprodukte  und
und  gilt:
gilt:
![{\displaystyle b_{ik}b^{kj}=b^{jk}b_{ki}=({\vec {b}}^{j}\cdot {\vec {b}}^{k})({\vec {b}}_{k}\cdot {\vec {b}}_{i})=[({\vec {b}}^{j}\cdot {\vec {b}}^{k}){\vec {b}}_{k}]\cdot {\vec {b}}_{i}={\vec {b}}^{j}\cdot {\vec {b}}_{i}=\delta _{i}^{j}.}](/svg/a815ee39140c3225dfbedb0eef1b4cd7ca2bd05a.svg)
Wechsel zu einer anderen Basis
Gegeben sei ein Vektor ,
der von einer Basis  zur Basis
wechseln soll. Das gelingt, indem jeder Basisvektor gemäß
zur Basis
wechseln soll. Das gelingt, indem jeder Basisvektor gemäß  durch die neue Basis ausgedrückt wird:
durch die neue Basis ausgedrückt wird:
 mit
mit 
Die Umkehrung davon ist  Der Basiswechsel bei Tensoren zweiter Stufe wird analog durchgeführt:
Der Basiswechsel bei Tensoren zweiter Stufe wird analog durchgeführt:
![{\displaystyle \mathbf {M} :=M_{ij}{\vec {a}}_{i}\otimes {\vec {b}}_{j}:=M_{ij}[({\vec {c}}^{k}\cdot {\vec {a}}_{i}){\vec {c}}_{k}]\otimes [({\vec {d}}^{l}\cdot {\vec {b}}_{j}){\vec {d}}_{l}]:=M_{kl}^{\prime }{\vec {c}}_{k}\otimes {\vec {d}}_{l}}](/svg/10badc3f0706b8fb6e32a1a7d01844d6fdab7267.svg) mit
mit 
was sich ohne weiteres auf Tensoren höherer Stufe verallgemeinern lässt. Das
Rechenzeichen „ “
bildet das dyadische
Produkt.
“
bildet das dyadische
Produkt.
Der Zusammenhang zwischen den Koordinaten
 und
und
kann kompakt mit Basiswechselmatrizen  mit den Komponenten
mit den Komponenten  bei einem Basiswechsel von
bei einem Basiswechsel von  nach
nach  und ihren dualen Partnern dargestellt werden. Die Inverse der
Basiswechselmatrix hat, wie oben angedeutet, die Komponenten
und ihren dualen Partnern dargestellt werden. Die Inverse der
Basiswechselmatrix hat, wie oben angedeutet, die Komponenten  denn bei der Matrizenmultiplikation ergibt sich für Komponenten
denn bei der Matrizenmultiplikation ergibt sich für Komponenten  :
:
![{\displaystyle [T_{Q}^{P}\cdot (T_{Q}^{P})^{-1}]_{ij}=({\vec {q}}^{i}\cdot {\vec {p}}_{k})({\vec {p}}^{k}\cdot {\vec {q}}_{j})=[({\vec {q}}^{i}\cdot {\vec {p}}_{k}){\vec {p}}^{k}]\cdot {\vec {q}}_{j}={\vec {q}}^{i}\cdot {\vec {q}}_{j}=\delta _{j}^{i}.}](/svg/b7b992074529b432635274ebffaae3a6f9cd5cab.svg)
Anwendungen
Basiswechselmatrizen besitzen vielfältige Anwendungsmöglichkeiten in der Mathematik und Physik.
In der Mathematik
Eine Anwendung von Basiswechselmatrizen in der Mathematik ist die Veränderung der Gestalt der Abbildungsmatrix einer linearen Abbildung, um die Rechnung zu vereinfachen.
Möchte man zum Beispiel die Potenz  einer -Matrix
mit einem Exponenten
einer -Matrix
mit einem Exponenten  berechnen, so ist die Zahl der benötigten Matrizenmultiplikationen von der
Größenordnung
berechnen, so ist die Zahl der benötigten Matrizenmultiplikationen von der
Größenordnung  .
Ist
diagonalisierbar, so existieren eine Diagonalmatrix
.
Ist
diagonalisierbar, so existieren eine Diagonalmatrix
 und eine Basiswechselmatrix
und eine Basiswechselmatrix  ,
sodass
,
sodass  und somit
und somit

Die Zahl der für die Berechnung der rechten Seite benötigten Multiplikationen ist nur von der Größenordnung:
 zur Berechnung von
zur Berechnung von  ,
, zur Berechnung des Produkts
zur Berechnung des Produkts 
- sowie einer Matrixmultiplikation für das Produkt

Da die Matrixmultiplikation
von der Größenordnung  ist, erhalten wir eine Komplexität von
ist, erhalten wir eine Komplexität von  anstelle von
anstelle von  .
.
In der Physik
Eine Anwendung von Basiswechselmatrizen in der Physik findet bspw. in der Ähnlichkeitstheorie statt, um dimensionslose Kennzahlen zu ermitteln. Hierbei werden durch einen Basiswechsel einer physikalischen Größe neue Basisdimensionen zugeordnet. Die dimensionslosen Kennzahlen stellen dann genau das Verhältnis der physikalischen Größe zu seiner Dimensionsvorschrift dar.
Literatur
- Peter Knabner, Wolf Barth: Lineare Algebra. Grundlagen und Anwendungen. Springer Spektrum, Berlin/Heidelberg 2013, ISBN 978-3-642-32185-6.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 24.10. 2021