Maxwell-Gleichungen
Die Maxwell-Gleichungen von James Clerk Maxwell (1831–1879) beschreiben die Phänomene des Elektromagnetismus. Sie sind damit ein wichtiger Teil des modernen physikalischen Weltbildes.
Die Gleichungen beschreiben, wie elektrische und magnetische Felder untereinander sowie mit elektrischen Ladungen und elektrischem Strom unter gegebenen Randbedingungen zusammenhängen. Zusammen mit der Lorentzkraft erklären sie alle Phänomene der klassischen Elektrodynamik. Sie bilden daher auch die theoretische Grundlage der Optik und der Elektrotechnik. Die Gleichungen sind nach dem schottischen Physiker James Clerk Maxwell benannt, der sie von 1861 bis 1864 erarbeitet hat. Er kombinierte dabei das Durchflutungsgesetz und das Gaußsche Gesetz mit dem Induktionsgesetz und führte zusätzlich, um die Kontinuitätsgleichung nicht zu verletzen, den ebenfalls nach ihm benannten Verschiebungsstrom ein.
Die Maxwell-Gleichungen sind ein spezielles System von linearen partiellen Differentialgleichungen erster Ordnung. Sie lassen sich auch in integraler Form, in differentialgeometrischer Form und in kovarianter Form darstellen.
Maxwell-Gleichungen im Feldlinienbild
 bilden geschlossene Bahnen oder sind unendlich lang.
bilden geschlossene Bahnen oder sind unendlich lang.Das elektrische und das magnetische Feld können durch Feldlinien repräsentiert
werden. Das elektrische Feld wird durch die Felder der elektrischen
Feldstärke  und der elektrischen
Flussdichte
und der elektrischen
Flussdichte  repräsentiert, während das magnetische Feld durch die Felder der magnetischen
Feldstärke
repräsentiert, während das magnetische Feld durch die Felder der magnetischen
Feldstärke  und der magnetischen
Flussdichte
repräsentiert wird.
und der magnetischen
Flussdichte
repräsentiert wird.
Die elektrische Feldstärke
und die magnetische Flussdichte
können prinzipiell durch die Kraftausübung auf Ladungen veranschaulicht werden.
Die Zusammenhänge werden im Artikel über die Lorentzkraft
genauer beschrieben. Im Falle des elektrischen Feldes zeigt der Verlauf der
elektrischen Feldstärke die Richtung der vom Feld ausgeübten Kraft an (die Kraft
wirkt in Richtung der Tangente an die Feldlinie am jeweiligen Ort), die
Feldliniendichte (die Nähe der Feldlinien zueinander) stellt die Feldstärke in
diesem Gebiet dar. Im Falle des magnetischen Feldes wirkt die Kraft normal zur
Richtung der magnetischen Flussdichte und normal zur Bewegungsrichtung der
Ladung.
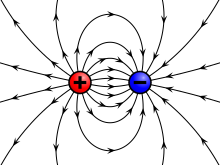
In der folgenden Abbildung wird das Feldlinienbild anhand einer positiven und einer negativen Ladung verdeutlicht. Das elektrische Feld ist an den Ladungsträgern am stärksten und nimmt mit größerer Entfernung ab:
In Quellenfeldern zeichnen sich die Feldlinien durch einen Anfang und ein Ende aus (oder verschwinden im Unendlichen). In Wirbelfeldern sind die Feldlinien geschlossene Kurven.
- Das Gaußsche Gesetz für elektrische Felder besagt, dass elektrische
Ladungen Quellen und Senken des Feldes der elektrischen Flussdichte
sind, also Anfang und Ende der zugehörigen Feldlinien darstellen. Elektrische
Felder ohne Quellen und Senken, sogenannte Wirbelfelder, treten hingegen bei
Induktionsvorgängen auf.
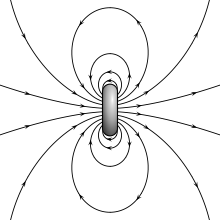
- Das Gaußsche Gesetz für den Magnetismus besagt, dass das Feld der
magnetischen Flussdichte
keine Quellen aufweist. Die magnetische Flussdichte hat demzufolge nur
Feldlinien, welche kein Ende besitzen. Eine magnetische Feldlinie ist daher
entweder unendlich lang oder führt in einer geschlossenen Bahn wieder auf sich
selbst zurück.
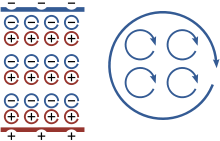
- Induktionsgesetz von Faraday: Zeitliche Änderungen des magnetischen Flusses führen zu einem elektrischen Wirbelfeld.
- Erweitertes Ampèresches Gesetz, auch Durchflutungs- oder Maxwell-Ampèresches Gesetz genannt: Elektrische Ströme – einschließlich einer zeitlichen Änderung der elektrischen Flussdichte – führen zu einem magnetischen Wirbelfeld.
Gleichungen
Im engeren Sinne sind die Maxwell-Gleichungen die mathematische Beschreibung dieser Gesetze. Direkt analog zu den Gesetzen kann man sie mit vier gekoppelten Differentialgleichungen beschreiben, es gibt jedoch auch weitere äquivalente Formulierungen.
Notation
Es werden die Methoden der Vektoranalysis
(und damit verbunden Oberflächenintegral,
Kurvenintegral)
verwendet.  bezeichnet den Nabla-Operator.
Die Differentialoperatoren bedeuten:
bezeichnet den Nabla-Operator.
Die Differentialoperatoren bedeuten:
 bezeichnet die
bezeichnet die  bezeichnet die
bezeichnet die Mikroskopische Maxwell-Gleichungen
Die mikroskopischen Maxwell-Gleichungen verknüpfen die elektrische Feldstärke
und die magnetische Flussdichte
mit der Ladungsdichte
 (Ladung pro Volumen) und der elektrischen
Stromdichte
(Ladung pro Volumen) und der elektrischen
Stromdichte  (Strom pro durchflossene Fläche).
(Strom pro durchflossene Fläche).
| Name | SI | Physikalischer Inhalt |
|---|---|---|
| Gaußsches Gesetz | 
|
Elektrische Feldlinien divergieren voneinander unter Anwesenheit
elektrischer Ladung; die Ladung ist Quelle des elektrischen Feldes. |
| Gaußsches Gesetz für Magnetfelder | 
|
Magnetische Feldlinien divergieren nicht, das Feld der
magnetischen Flussdichte ist quellenfrei; es gibt keine magnetischen Monopole. |
| Induktionsgesetz | 
|
Änderungen der magnetischen Flussdichte führen zu einem elektrischen
Wirbelfeld. Das Minuszeichen schlägt sich in der Lenzschen Regel nieder. |
| Erweitertes Durchflutungsgesetz | 
|
Elektrische Ströme – einschließlich des Verschiebungsstroms
– führen zu einem magnetischen Wirbelfeld. |
Dabei kann auch  eingesetzt werden.
eingesetzt werden.
Makroskopische Maxwell-Gleichungen
 bzw.
bzw.  .
.Bei Anwesenheit von Materie sind die mikroskopischen Maxwell-Gleichungen einerseits unhandlich, da schließlich jeder Ladungsträger in jedem Atom des Mediums berücksichtigt werden muss. Andererseits können die magnetischen Eigenschaften (beispielsweise von einem Permanentmagneten) prinzipiell nicht ohne zusätzliche physikalische Erkenntnisse der Quantenmechanik aus den mikroskopischen Maxwell-Gleichungen abgeleitet werden.
Die makroskopischen Maxwell-Gleichungen berücksichtigen die Eigenschaften der
Materie in Form von Materialparametern, wobei dem leeren Raum die Parameter Permittivität  und Permeabilität
und Permeabilität
 zugeordnet werden. Maxwell selbst ging nicht von einem leeren Raum, sondern
– wie zu seiner Zeit üblich – von dem mit einem sogenannten „Äther“ erfüllten
Raum aus. Die Bezeichnung „makroskopisch“ kommt dadurch zustande, dass die
Eigenschaften der Materie letztlich örtlich gemittelte Eigenschaften der Materie
kennzeichnen. Im Hinblick auf die Ladungen wird dabei zwischen freien
Ladungsträgern (etwa Leitungselektronen im elektrischen Leiter) und gebundenen
Ladungsträgern (etwa Hüllenelektronen) unterschieden, und es wird davon
ausgegangen, dass die gebundenen Ladungsträger durch mikroskopische Prozesse[1]
zu einer makroskopischen Polarisation
bzw. Magnetisierung
führen.
zugeordnet werden. Maxwell selbst ging nicht von einem leeren Raum, sondern
– wie zu seiner Zeit üblich – von dem mit einem sogenannten „Äther“ erfüllten
Raum aus. Die Bezeichnung „makroskopisch“ kommt dadurch zustande, dass die
Eigenschaften der Materie letztlich örtlich gemittelte Eigenschaften der Materie
kennzeichnen. Im Hinblick auf die Ladungen wird dabei zwischen freien
Ladungsträgern (etwa Leitungselektronen im elektrischen Leiter) und gebundenen
Ladungsträgern (etwa Hüllenelektronen) unterschieden, und es wird davon
ausgegangen, dass die gebundenen Ladungsträger durch mikroskopische Prozesse[1]
zu einer makroskopischen Polarisation
bzw. Magnetisierung
führen.
Die Anwesenheit von Materie erfordert, dass das elektrische und das
magnetische Feld jeweils durch zwei zusätzliche Vektorfelder
beschrieben werden, die elektrische
Flussdichte  und die magnetische
Feldstärke
und die magnetische
Feldstärke  .
.
| Name | SI | Physikalischer Inhalt |
|---|---|---|
| Gaußsches Gesetz | 
|
Die Ladung ist Quelle des elektrischen Feldes. |
| Gaußsches Gesetz für Magnetfelder |
|
Das Feld der magnetischen Flussdichte ist quellenfrei; es gibt keine magnetischen Monopole. |
| Induktionsgesetz |
|
Änderungen des magnetischen Feldes führen zu einem elektrischen Wirbelfeld. |
| Erweitertes Durchflutungsgesetz | 
|
Elektrische Ströme – einschließlich des Verschiebungsstroms
– führen zu einem magnetischen Wirbelfeld. |
und es ist z.B. 
Differentielle und integrale Formulierung
In den folgenden Abschnitten bzw. Tabellen wird bezüglich der Indizierung von
Ladung und Strom eine semantisch äquivalente Konvention benutzt: Und zwar werden
 bzw.
bzw.  ohne Index geschrieben und als „wahre Ladungen“ bzw. „wahre Ströme“ bezeichnet,
während umgekehrt die in den 'mikroskopischen Gleichungen' auftretenden
nicht-indizierten Größen als Effektivgrößen
ohne Index geschrieben und als „wahre Ladungen“ bzw. „wahre Ströme“ bezeichnet,
während umgekehrt die in den 'mikroskopischen Gleichungen' auftretenden
nicht-indizierten Größen als Effektivgrößen  bzw.
bzw.  geschrieben werden. Im Vakuum gelten die „mikroskopischen Gleichungen“ und auf
die Indizierung kann verzichtet werden. Die folgenden Gleichungen gelten dagegen
in Materie, und man ist auf eine einheitliche Schreibweise angewiesen, meistens
die unten benutzte, obwohl auch hier unterschiedliche Konventionen nicht
ausgeschlossen sind.
geschrieben werden. Im Vakuum gelten die „mikroskopischen Gleichungen“ und auf
die Indizierung kann verzichtet werden. Die folgenden Gleichungen gelten dagegen
in Materie, und man ist auf eine einheitliche Schreibweise angewiesen, meistens
die unten benutzte, obwohl auch hier unterschiedliche Konventionen nicht
ausgeschlossen sind.
Übersicht
Hier werden u.a. die Maxwell-Gleichungen in SI-Einheiten angegeben. Formulierungen in anderen Einheitensystemen sind am Schluss aufgeführt bzw. werden durch Bemerkungen im Text erläutert.
Die im Folgenden in der rechten Spalte im Zentrum von einfachen oder zweifachen Integralen angegebenen Symbole betonen, dass man es mit geschlossenen Kurven bzw. Flächen zu tun hat.
| differentielle Form | verknüpfender Integralsatz | Integralform | ||
|---|---|---|---|---|
| Physikalisches
gaußsches
Gesetz: Das -Feld
ist ein Quellenfeld. Die Ladung (Ladungsdichte  )
ist Quelle des elektrischen Feldes. )
ist Quelle des elektrischen Feldes. |
Gauß | Der (elektrische)
Fluss
durch die geschlossene Oberfläche  eines Volumens
eines Volumens  ist direkt proportional zu der elektrischen Ladung in seinem Inneren.
ist direkt proportional zu der elektrischen Ladung in seinem Inneren.
| ||

|

|

| ||
| Quellenfreiheit
des B-Feldes: Das -Feld
ist quellenfrei. Es gibt keine magnetischen Monopole. |
Gauß | Der magnetische Fluss durch die geschlossene Oberfläche eines Volumens ist gleich der magnetischen Ladung in seinem Inneren, nämlich Null, da es keine magnetischen Monopole gibt. | ||

|
|

| ||
| Induktionsgesetz: Jede Änderung des -Feldes
führt zu einem elektrischen Gegenfeld.Die Wirbel des elektrischen Feldes sind von der zeitlichen Änderung der magnetischen Flussdichte abhängig. |
Stokes | Die (elektrische)
Zirkulation
über der Randkurve  einer Fläche
einer Fläche  ist gleich der negativen zeitlichen Änderung des magnetischen Flusses
durch die Fläche.[2]
ist gleich der negativen zeitlichen Änderung des magnetischen Flusses
durch die Fläche.[2]
| ||

|
|

| ||
| Durchflutungsgesetz: Die Wirbel des Magnetfeldes hängen von der Leitungsstromdichte
|
Stokes | Die magnetische
Zirkulation über der Randkurve
einer Fläche
ist gleich der Summe aus dem Leitungsstrom und der zeitlichen Änderung des
elektrischen Flusses durch die Fläche.[2]
| ||

|
|

| ||
 und von der elektrischen Flussdichte
und von der elektrischen Flussdichte  ab.
ab. bezeichnet und ergibt als Summe mit der Leitungsstromdichte die totale
Stromdichte
bezeichnet und ergibt als Summe mit der Leitungsstromdichte die totale
Stromdichte 
Erläuterungen
Zu beachten ist, dass alle Größen aus einem beliebigen, aber für alle Größen gleichen Inertialsystem gemessen werden müssen. Soll mithilfe der o.g. Gleichungen beispielsweise die induzierte Spannung in einer bewegten Leiterschleife betrachtet werden, so ist es günstig, die Größen in den bewegten Teilen des Systems mithilfe der Lorentztransformation in das Ruhesystem umzurechnen.
In diesem Zusammenhang sei erwähnt, dass manche Lehrbücher anstelle des Induktionsgesetzes folgende Näherung notieren:

wobei die Feldstärke  jeweils in einem Bezugssystem gemessen wird, in dem das Linienelement
jeweils in einem Bezugssystem gemessen wird, in dem das Linienelement  ruht. Diese Gleichung gilt nur für Geschwindigkeiten, die klein sind im
Vergleich zur Lichtgeschwindigkeit,
ruht. Diese Gleichung gilt nur für Geschwindigkeiten, die klein sind im
Vergleich zur Lichtgeschwindigkeit, 
Elektrischer Strom
In der elektrischen Stromdichte
kann rein formal sowohl die übliche Leitungsstromdichte entsprechend dem Fluss
von elektrischen Ladungsträgern als auch die Verschiebungsstromdichte
(die zeitliche Änderung der elektrischen Flussdichte) zusammengefasst werden,
was eine wichtige Rolle bei der Entdeckung der Maxwell-Gleichungen durch Maxwell
spielte. Üblicherweise wird aber der Verschiebungsstrom getrennt aufgeführt. Die
elektrische Stromdichte ist über die Materialgleichungen
der Elektrodynamik und die dabei auftretende elektrische
Leitfähigkeit  mit der elektrischen Feldstärke
verknüpft.
mit der elektrischen Feldstärke
verknüpft.
Elektrisches Feld
ist die elektrische Flussdichte, historisch und etwas verwirrend auch als
elektrische Verschiebungsdichte oder als elektrische Erregung
bezeichnet. Dabei handelt es sich um die Dichte des elektrischen Flusses,
welcher von elektrischen Ladungen ausgeht. Die elektrische Flussdichte ist über
die Materialgleichungen der Elektrodynamik und die dabei auftretende dielektrische
Leitfähigkeit  mit der elektrischen Feldstärke
verknüpft. Noch allgemeiner gilt
mit der elektrischen Feldstärke
verknüpft. Noch allgemeiner gilt  mit der elektrischen Polarisation ,
dem elektrischen Dipolmoment pro Volumen.
mit der elektrischen Polarisation ,
dem elektrischen Dipolmoment pro Volumen.
Magnetisches Feld
ist die magnetische Flussdichte, auch historisch als Induktion
bezeichnet. Dabei handelt es sich um die Dichte des magnetischen Flusses,
welcher von bewegten elektrischen Ladungen oder von Permanentmagneten verursacht
wird. Die magnetische Flussdichte ist über die Materialgleichungen der
Elektrodynamik und die dabei auftretende magnetische
Leitfähigkeit  mit der magnetischen Feldstärke
verknüpft. Noch allgemeiner gilt
mit der magnetischen Feldstärke
verknüpft. Noch allgemeiner gilt  mit der magnetischen
Polarisation
mit der magnetischen
Polarisation  ,
dem magnetischen Dipolmoment pro Volumen (als Magnetisierung wird die im
Weiteren zu
äquivalente Größe
,
dem magnetischen Dipolmoment pro Volumen (als Magnetisierung wird die im
Weiteren zu
äquivalente Größe  bezeichnet).
bezeichnet).
Die magnetische Polarisation
sollte nicht mit der Stromdichte
(genauer: mit der Leitungsstromdichte) verwechselt werden. Vielmehr gilt:

Erläuterung zu den Maxwell-Gleichungen mit Materie
Die in allen drei Bereichen auftretenden Materialgleichungen werden nicht direkt zu den Maxwell-Gleichungen gezählt, sondern die drei Gleichungssätze:
- Maxwell-Gleichungen
- Materialgleichungen der Elektrodynamik
- Kontinuitätsgleichungen der Elektrodynamik
stellen gemeinsam und unter gegenseitiger Ergänzung das Fundament der elektrodynamischen Feldtheorie dar. Die Materialgleichungen gelten in der allgemeinen Form sowohl für den leeren Raum als auch für mit Materie ausgefüllte Raumbereiche.
Aus historischen Gründen, und manchmal auch um bestimmte Berechnungsvorgänge
spezifisch darzustellen, werden die Materialgleichungen und die darin
auftretenden drei Leitfähigkeiten jeweils in den Anteil des leeren Raumes
bzw.
und den Anteil der Leitfähigkeit, welcher durch die Materie verursacht wird,
 und
und  aufgespalten.
aufgespalten.
Für das elektrische Feld ergibt sich durch die Aufspaltung der dielektrischen
Leitfähigkeit die Möglichkeit zur Einführung eines weiteren Vektorfeldes, der elektrischen
Polarisation
(eigentlich dielektrische Polarisation, die aber auch als elektrische
Polarisation bezeichnet wird, da dem elektrischen Feld zugewiesen).
Analog dazu beschreibt die magnetische
Polarisation
die von den Eigenschaften des leeren Raumes losgelösten Verhältnisse in Materie
für das magnetische Feld. Aus der magnetischen Polarisation ergibt sich die
Magnetisierung  .
(Im cgs-System sind die Verhältnisse verwirrender:
und
werden dort gleich bezeichnet, als cgs-Magnetisierung, und unterscheiden
sich nur um einen Faktor
.
(Im cgs-System sind die Verhältnisse verwirrender:
und
werden dort gleich bezeichnet, als cgs-Magnetisierung, und unterscheiden
sich nur um einen Faktor  ,
je nachdem ob
oder
gemeint ist.)
,
je nachdem ob
oder
gemeint ist.)
Grundsätzlich kann ohne Verlust auf die Einführung der Vektorfelder der
elektrischen Polarisation
und der magnetischen Polarisation
(bzw. der dazu äquivalenten Magnetisierung )
verzichtet werden. Stattdessen werden die Abhängigkeiten in den
Materialgleichungen und den entsprechend allgemein gefassten Leitfähigkeiten in
Form von Tensoren höherer Ordnung berücksichtigt. Weiterhin können die
Leitfähigkeiten auch Funktionen darstellen, um nichtlineare Eigenschaften der
Materie erfassen zu können. Diese können sogar von der Vorbehandlung abhängen,
also explizit zeitabhängig sein. Diese Vorgangsweise empfiehlt sich auch für
einen systematischen Zugang, wenn dieser über das SI-Einheitensystem erfolgt.
Aus historischen Gründen, aber auch in bestimmten Teilbereichen der Physik, wird
allerdings manchmal sehr intensiv von den -
und -
(bzw. -)Vektorfeldern
Gebrauch gemacht, weshalb im Folgenden dieser Sachverhalt näher dargestellt
wird.
In Materie gilt allgemein

sowie

bzw.
 mit der oben eingeführten „magnetischen Polarisation“
mit der oben eingeführten „magnetischen Polarisation“  ,
,
wobei sich im Spezialfall der Linearität bei Isotropie oder bei kubischen Systemen noch folgende Vereinfachung ergibt:

und
 .
.
In homogenen isotropen Materialien (d.h. die Größen  und
und  sind skalar und konstant) erhält man für die Maxwell-Gleichungen
sind skalar und konstant) erhält man für die Maxwell-Gleichungen



 .
.
In anisotroper
nicht-kubischer linearer Materie werden die Skalare
und
zu Tensoren 2.
Stufe, wobei die Beziehungen weiterhin Gültigkeit behalten. In nichtlinearen
Materialien hängen die Leitfähigkeiten von den jeweiligen Momentanwerten der
Feldstärken oder im allgemeinsten Fall von deren gesamter Geschichte ab (siehe
Hysterese). Die -
und -Felder,
elektrische bzw. magnetische Polarisation genannt, verschwinden außerhalb der
Materie, was in den genannten Spezialfällen gleichwertig mit der Aussage ist,
dass  wird.
wird.
Die dielektrische
Polarisation ist dann mit der elektrischen
Suszeptibilität  ,
bzw. der relativen Permittivität
,
bzw. der relativen Permittivität  >
und der Vakuum-Permittivität (Dielektrizitätskonstante)
folgendermaßen verknüpft (im SI, d.h. in der Einheit
>
und der Vakuum-Permittivität (Dielektrizitätskonstante)
folgendermaßen verknüpft (im SI, d.h. in der Einheit  ):
):
 ,
,
mit
 .
.
Für die magnetische Polarisation
bzw. die Magnetisierung
gilt eine entsprechende Gleichung mit der magnetischen
Suszeptibilität  bzw. der relativen Permeabilität
und der Vakuum-Permeabilität (magnetische
Feldkonstante)
mit der Einheit
bzw. der relativen Permeabilität
und der Vakuum-Permeabilität (magnetische
Feldkonstante)
mit der Einheit  :
:
 ,
,
mit
 .
.
(Vorsicht: im cgs-System sind
und
mit
zu multiplizieren!)
Weiter ergibt sich die Definition des Brechungsindex mit

und der Zusammenhang zwischen Lichtgeschwindigkeit und elektrischer und magnetischer Feldkonstante
 .
.
Dies bringt die Ausbreitung von Licht in Materie mit den Konstanten des Mediums in Verbindung. So ist die Phasengeschwindigkeit im Medium
 ,
,
die ohne Dispersion gleich der Gruppengeschwindigkeit ist.
Zusammenfassung
| Durchflutungsgesetz | 
|
| Induktionsgesetz |
|
| Gaußsches Gesetz | 
|
| Gaußsches Gesetz des Magnetismus |
|
| siehe Erläuterung |  (oder auch
(oder auch  ) )
|
| siehe Erläuterung |  (oder auch
(oder auch  ) )
|
Erläuterung:
Die zuletzt angegebenen, eingeklammerten Beziehungen
gelten nur bei linearem Zusammenhang. Die davor angegebenen Definitionen
von
und
sind dagegen allgemein.
Traditionell werden die beiden zuletzt angegebenen sogenannten
Materialgesetze und das ohmsche
Gesetz  (
ist hier der spezifische
elektrische Leitwert) meist nicht in die Maxwell-Gleichungen miteinbezogen.
Die Kontinuitätsgleichung
(
ist hier der spezifische
elektrische Leitwert) meist nicht in die Maxwell-Gleichungen miteinbezogen.
Die Kontinuitätsgleichung
 als Beschreibung der Ladungserhaltung
folgt aus den Maxwell-Gleichungen.
als Beschreibung der Ladungserhaltung
folgt aus den Maxwell-Gleichungen.
Die elektrischen Feldstärken
sowie die magnetischen Flussdichten
werden als physikalisch vorhandene Kraftfelder interpretiert. Schon Maxwell
verband diese Kraftfelder mit dem elektrischen Potenzialfeld  und dem Vektorpotential
und dem Vektorpotential  :
:

Der Zusammenhang zwischen Feldstärken und Potentialen ist zwar nur bis auf Eichtransformationen definiert, den Potentialen kommt aber in der Quantentheorie eine fundamentale Bedeutung zu.
Maxwell-Gleichungen mit Differentialformen (differentialgeometrische Formulierung)
Die Beschreibung durch die Vektoranalysis hat den großen Nachteil, dass sie
- auf den flachen
 bzw.
bzw.  beschränkt ist
beschränkt ist - prinzipiell „metrisch verseucht“ ist, da entweder die euklidische oder die Minkowski-Metrik in den Operatoren verbaut ist, obwohl die Maxwell-Gleichungen metrikfrei definiert sind
- die Wahl einer Karte der zugrunde liegenden Mannigfaltigkeit unphysikalisch ist, da Naturgesetze unabhängig von den gewählten Koordinaten richtig sein müssen.
Es ist deshalb besser, die Gleichungen mit alternierenden Differentialformen zu schreiben und somit konsequent die Methoden der Differentialgeometrie zu benutzen.
Der dreidimensionale Ansatz
In diesem dreidimensionalen Ansatz wird die Zeit als äußerer Parameter behandelt, wie aus der klassischen Mechanik gewohnt.
Die inhomogenen Maxwell-Gleichungen
Sei  eine Differentialform auf der beliebigen glatten Mannigfaltigkeit
eine Differentialform auf der beliebigen glatten Mannigfaltigkeit  der Dimension 3 und
der Dimension 3 und  die Cartan’sche äußere
Ableitung. Dann gilt also
die Cartan’sche äußere
Ableitung. Dann gilt also

weil es keine von 0 verschiedene Differentialform vom Grad 4 auf einer
dreidimensionalen Mannigfaltigkeit geben kann. Auf einem sternförmigen
Gebiet sichert das Lemma
von Poincaré, dass eine Potentialform  existiert, so dass
existiert, so dass
 (Gesetz von Gauß).
(Gesetz von Gauß).
Weiterhin wird postuliert, dass die zeitliche Ableitung der Ladung  aus einer Mannigfaltigkeit einem Strom durch die Berandung entgegengesetzt ist
(sprich: Alles was aus dem „Volumen“
herauswill, muss durch die Berandungsfläche
aus einer Mannigfaltigkeit einem Strom durch die Berandung entgegengesetzt ist
(sprich: Alles was aus dem „Volumen“
herauswill, muss durch die Berandungsfläche  fließen).
fließen).

Diese Aussage entspricht also dem zur Kontinuitätsgleichung gehörigen
Erhaltungssatz für die Gesamtladung (die Beliebigkeit der Mannigfaltigkeit
sichert analog zum Gesetz von Gauß, dass dieser auch ohne Integrale gilt).  wird Stromdichte(zweiform) genannt. Also:
wird Stromdichte(zweiform) genannt. Also:

Diese mathematische Aussage impliziert aber nach dem Lemma von Poincaré, dass
auf einem sternförmigen Gebiet eine Differentialform vom Grad 1  existiert, sodass
existiert, sodass
 (Maxwell-Ampère-Gesetz).
(Maxwell-Ampère-Gesetz).
Anzumerken ist, dass das Gesetz von Gauß rein aus der Geometrie des Problems folgt, also letztlich keine physikalische Bedeutung hat: Der einzige physikalische Input ist die Existenz elektrischer Ladungen bzw. die Kontinuitätsgleichung, welche im Maxwell-Ampère-Gesetz mündet. Die inhomogenen Gleichungen sind also Folge der Ladungserhaltung. Nicht betroffen ist im Grunde nur der sogenannte Spinmagnetismus, d.h. derjenigen magnetischen Phänomene, die nicht von den hier ausschließlich behandelten Ampèreschen Kreisströmen (den Wirbeln von j ) herrühren (siehe Mathematische Struktur der Quantenmechanik, speziell den Abschnitt über den Spin, sowie den Artikel über das sogenannte gyromagnetische Verhältnis). Das betrifft den dominierenden Teil des Permanent-Magnetismus. Das zeigt aber im Grunde nur, dass die klassische Elektrodynamik nicht in sich selbst abgeschlossen ist, obwohl es mathematisch und theoretisch-physikalisch so scheint.
Die homogenen Maxwell-Gleichungen
Ähnlich der Kontinuitätsgleichung wird das Induktionsgesetz postuliert. Die
zeitliche Änderung des magnetischen Flusses durch eine Fläche  geht einher mit der Induktion einer entgegengesetzten Ringspannung auf ihrem
Rand
geht einher mit der Induktion einer entgegengesetzten Ringspannung auf ihrem
Rand  .
Das ist völlig analog zur Kontinuitätsgleichung, nur eine Dimension tiefer.
.
Das ist völlig analog zur Kontinuitätsgleichung, nur eine Dimension tiefer.

Dabei ist  die magnetische Flussdichte(zweiform) und
die magnetische Flussdichte(zweiform) und  das elektrische Feld. Die Beliebigkeit der Fläche
sichert, dass sich das Induktionsgesetz auch ohne Integral schreiben lässt:
das elektrische Feld. Die Beliebigkeit der Fläche
sichert, dass sich das Induktionsgesetz auch ohne Integral schreiben lässt:

Man erkennt also, dass  nur von den (Raum)-Komponenten der Mannigfaltigkeit
abhängen kann, nicht aber von der Zeit. Jedoch hängt der Ausdruck links vom
Gleichheitszeichen gar nicht von der Wahl der Koordinaten ab. Also muss
f(x,y,z) verschwinden. Zusätzlich kann die Gleichung auch nur dann
lorentzinvariant sein. Es folgt also die Quellfreiheit der magnetischen
Flussdichte(zweiform) (d.h. die Nichtexistenz magnetischer Ladungen, siehe
oben):
nur von den (Raum)-Komponenten der Mannigfaltigkeit
abhängen kann, nicht aber von der Zeit. Jedoch hängt der Ausdruck links vom
Gleichheitszeichen gar nicht von der Wahl der Koordinaten ab. Also muss
f(x,y,z) verschwinden. Zusätzlich kann die Gleichung auch nur dann
lorentzinvariant sein. Es folgt also die Quellfreiheit der magnetischen
Flussdichte(zweiform) (d.h. die Nichtexistenz magnetischer Ladungen, siehe
oben):

Wieder geht lediglich ein Postulat ein, das Induktionsgesetz; die Quellfreiheit ist dann eine rein mathematische Konsequenz.
Die Materialgleichungen
Weil die Einsformen  und
und  nicht kompatibel mit den Zweiformen
nicht kompatibel mit den Zweiformen  und
und  sind, muss man eine Beziehung zwischen ihnen herstellen. Das geschieht mit dem
Hodge-Stern-Operator
sind, muss man eine Beziehung zwischen ihnen herstellen. Das geschieht mit dem
Hodge-Stern-Operator
 ,
welcher auf einer dreidimensionalen Mannigfaltigkeit ein Isomorphismus zwischen
Einsformen und Zweiformen ist.
,
welcher auf einer dreidimensionalen Mannigfaltigkeit ein Isomorphismus zwischen
Einsformen und Zweiformen ist.

Hier wird offensichtlich, warum
und
bzw.
und
schon aus mathematischen Gründen nicht einfach (bis auf einen Faktor)
identifiziert werden können.
ist ja eine Einsform und wird über eine Kurve integriert,
ist eine Zweiform und braucht eine (2-dimensionale) Fläche zur Integration.
(Zudem sind in polarisierbaren Medien die zugehörigen Vektorfelder auch
physikalisch wesentlich verschieden.) Es kann also schon von der Mathematik her
keine Proportionalität zwischen diesen Größen bestehen, wie es die Beschreibung
durch die Vektoranalysis suggeriert. Gleiches gilt für
und :
Die erste Größe beschreibt eine Differentialform vom Grade 1, braucht zur
Integration also eine Kurve, wie bei einem Kraft-Integral; die zweite Größe ist
eine Zweiform, braucht also eine Fläche wie bei einem Fluss-Integral. Dieser
Unterschied scheint pedantisch, ist aber fundamental.
Es sei bemerkt, dass erst mit dem Hodge-Operator die Metrik eine Rolle in den
Gleichungen spielt. Die Maxwell-Gleichungen ohne die Materialgleichungen sind
unabhängig von der Wahl der Metrik und sogar unabhängig von der Beschaffenheit
der Mannigfaltigkeit, solange
dreidimensional ist. Lediglich die Wirkung von
in den Materialgleichungen würde sich verändern.
Der vierdimensionale Ansatz
 sei eine glatte Mannigfaltigkeit der Dimension 4 und
sei eine glatte Mannigfaltigkeit der Dimension 4 und  eine glatte Untermannigfaltigkeit der Dimension 3 (aus dem 3-dimensionalen
Ansatz) und
eine glatte Untermannigfaltigkeit der Dimension 3 (aus dem 3-dimensionalen
Ansatz) und  der metrische Tensor mit Koeffizientendarstellung.
der metrische Tensor mit Koeffizientendarstellung.

(Es gibt viele äquivalente Formen, die man z.B. durch Multiplikation mit einer Zahl vom Betrag 1 erhalten kann.)
Die Metrik muss lediglich festgelegt werden, damit man das nun folgende
Viererpotential  explizit hinschreiben kann (Physik: „kontravariante Größen“), ohne den Umweg
über die Koeffizienten eines Vektorfeldes (Physik: „kovariante Größen“)
explizit hinschreiben kann (Physik: „kontravariante Größen“), ohne den Umweg
über die Koeffizienten eines Vektorfeldes (Physik: „kovariante Größen“)  zu gehen mit
zu gehen mit
 .
.
Die Festlegung auf den Minkowskiraum, die man u.a. benötigt um „raumartige“ und „zeitartige“ Vektor- bzw. Tensorkomponenten zu unterscheiden, oder bei der Definition der Dualitätsoperation (siehe unten), ist also hier nicht erforderlich. Man könnte die Metrik auch frei wählen, dann sehen die Komponenten der Einsform

nur anders aus, denn
 .
.
Sei also ab hier die Mannigfaltigkeit der flache Minkowskiraum, das heißt
o.B.d.A.  .
Dann ist das Vektorpotential gegeben durch
.
Dann ist das Vektorpotential gegeben durch
 für das Vektorfeld
für das Vektorfeld  .
.
Die homogenen Maxwell-Gleichungen
Sei nun die äußere Ableitung von
gegeben durch  ,
also durch den sogenannten Feldstärketensor
(Faradayzweiform):
,
also durch den sogenannten Feldstärketensor
(Faradayzweiform):
 .
.
Beeindruckend ist die Tatsache, dass die äußere Ableitung von  immer verschwindet, unabhängig davon, wie
aussieht. Das ergibt die sogenannte Eichfreiheit
und begründet auch, warum die Einschränkung auf den Minkowskiraum die
Allgemeinheit nicht verletzt. Da die Gleichungen jedoch ohne jeden
physikalischen Input auskommen, folgt unmittelbar, dass die homogenen
Maxwell-Gleichungen lediglich Folge der Geometrie des Raumes und des benutzten
Formalismus sind (gleiches gilt ja auch für die Beziehung
immer verschwindet, unabhängig davon, wie
aussieht. Das ergibt die sogenannte Eichfreiheit
und begründet auch, warum die Einschränkung auf den Minkowskiraum die
Allgemeinheit nicht verletzt. Da die Gleichungen jedoch ohne jeden
physikalischen Input auskommen, folgt unmittelbar, dass die homogenen
Maxwell-Gleichungen lediglich Folge der Geometrie des Raumes und des benutzten
Formalismus sind (gleiches gilt ja auch für die Beziehung  :
eine geschlossene Differentialform ist ja noch weitgehend frei, nämlich
bis auf das äußere Differential einer um einen Grad niedrigeren Form. ).
:
eine geschlossene Differentialform ist ja noch weitgehend frei, nämlich
bis auf das äußere Differential einer um einen Grad niedrigeren Form. ).
Die Materialgleichungen
Die Faradayzweiform lässt sich auch in den bereits bekannten Größen schreiben:
 .
.
Die zu F duale[4] Zweiform G heißt Maxwellzweiform und ist gegeben durch schon bekannten Größen, nämlich:
 .
.
In physikalischen Theorien entspricht F dem Feldstärketensor und G dessen dualem Tensor (siehe unten).
Die gesamten Maxwell-Gleichungen mit nur zwei Differentialformen
Definiert man nun eine Dreiform  [5],
so ergibt deren äußere Ableitung
[5],
so ergibt deren äußere Ableitung

Das entspricht dem schon erwähnten Erhaltungssatz für die Gesamtladung.
Während nun die beiden homogenen Maxwell-Gleichungen (Maxwell I und II) durch
die Aussage zusammengefasst werden können, dass die elektrischen bzw.
magnetischen Felder
bzw.
durch eine einzige geschlossene Differentialform zweiter Stufe  repräsentiert werden (
repräsentiert werden ( ),
gilt für die verbleibenden inhomogenen Maxwell-Gleichungen III und IV die
Aussage, dass die äußere Ableitung der dualen Form
),
gilt für die verbleibenden inhomogenen Maxwell-Gleichungen III und IV die
Aussage, dass die äußere Ableitung der dualen Form  mit der Stromform
mit der Stromform  identisch ist. Also
identisch ist. Also
 .
.
Damit ist die Gesamtheit aller vier Maxwell-Gleichungen in mathematischer
Kurzform durch nur zwei Differentialformen,
und ,
ausgedrückt. (Insbesondere folgt aus der letzten Gleichung sofort auch die
Kontuitätsgleichung, weil die zweimalige äußere Ableitung immer Null ergibt.)
Erneut spielt die Metrik keine direkte Rolle (indirekt ist sie sehr wichtig,
z.B. bei der Definition der Dualität, die bei der Berechnung der Ladungen
und Ströme aus den Feldern benötigt wird sowie bei der Angabe der expliziten
Form der Lorentzinvarianz). Auch die Mannigfaltigkeit
ist beliebig, solange sie Dimension 4 hat. Letztlich ist aber physikalisch auch
hier die Metrik wesentlich, nicht nur bei der gerade erwähnten Dualität. Sondern
auch hier kommt es nicht allein auf die Vierdimensionalität der Mannigfaltigkeit
an, sondern auch auf die Unterscheidung zwischen Raum- und Zeitkoordinaten (bzw.
zwischen sogenannten raumartigen und zeitartigen Vektoren, Tensor- und
Feldkomponenten), die sich ja mit Hilfe des metrischen Tensors ausdrücken.
Dieser ist ja nicht gegeben durch  sondern z.B. durch
sondern z.B. durch  Man hat es also nicht mit einer -,
sondern, wie schon gesagt, mit einer
Man hat es also nicht mit einer -,
sondern, wie schon gesagt, mit einer  -Mannigfaltigkeit
zu tun. Die Unterscheidung von „raumartigen“ und „zeitartigen“ Größen in der
Metrik hängt auch mit dem Unterschied zwischen elektrischen und
magnetischen Feldern zusammen. Obwohl die (insgesamt sechs)
Feldkomponenten dieser Größen durch die Lorentz-Beziehungen
ineinander transformiert werden können, ist die Charakterisierung eines Feldes
als im Wesentlichen „elektrisch“ bzw. „magnetisch“ eine Invariante der Theorie,
weil die Lagrange-Funktion,
eine aus *F, F und J zusammengesetzte invariante Funktion,
aus der sich die Bewegungsgleichungen (also die Maxwell-Gleichungen) berechnen
lassen, im cgs-System im Wesentlichen gleich B2-E2
ist. (Bemerkung: Ein Minkowski-Vektor
-Mannigfaltigkeit
zu tun. Die Unterscheidung von „raumartigen“ und „zeitartigen“ Größen in der
Metrik hängt auch mit dem Unterschied zwischen elektrischen und
magnetischen Feldern zusammen. Obwohl die (insgesamt sechs)
Feldkomponenten dieser Größen durch die Lorentz-Beziehungen
ineinander transformiert werden können, ist die Charakterisierung eines Feldes
als im Wesentlichen „elektrisch“ bzw. „magnetisch“ eine Invariante der Theorie,
weil die Lagrange-Funktion,
eine aus *F, F und J zusammengesetzte invariante Funktion,
aus der sich die Bewegungsgleichungen (also die Maxwell-Gleichungen) berechnen
lassen, im cgs-System im Wesentlichen gleich B2-E2
ist. (Bemerkung: Ein Minkowski-Vektor  ist raumartig bzw. zeitartig bzw. lichtartig, je nachdem ob
ist raumartig bzw. zeitartig bzw. lichtartig, je nachdem ob
![(\mathrm {d} s)^{2}[{\vec {v}}]](/svg/abb115bbc434ffaacc40725bb46b60e861333b32.svg) positiv bzw. negativ bzw. Null ist. Analog ist ein elektromagnetisches Feld im
Wesentlichen magnetisch bzw. elektrisch bzw. wellenartig je
nachdem ob die Lagrangefunktion, für
positiv bzw. negativ bzw. Null ist. Analog ist ein elektromagnetisches Feld im
Wesentlichen magnetisch bzw. elektrisch bzw. wellenartig je
nachdem ob die Lagrangefunktion, für  ,
positiv bzw. negativ bzw. Null ist.)
,
positiv bzw. negativ bzw. Null ist.)
Abstrakte Integralformulierung und Interpretation
Diese abstrakte differentielle Formulierung der Maxwell-Gleichungen benutzt
die Theorie der sogenannten alternierenden Differentialformen, insbesondere das
sogenannte äußere Differential. Die zugehörige abstrakte Integralformulierung
ergibt sich durch Anwendung des verallgemeinerten
stokesschen Satzes aus dieser mathematischen Theorie: Man konzentriert sich
dazu in der angegebenen Drei-Mannigfaltigkeit
mit Minkowski-Metrik
(z.B. eingebettet in den Raum  )
besonders auf deren Rand
)
besonders auf deren Rand  eine geschlossene Zwei-Mannigfaltigkeit, und erhält:
eine geschlossene Zwei-Mannigfaltigkeit, und erhält:

für alle IMG class="text"
style="width: 1.78ex; height: 2.17ex; vertical-align: -0.33ex;" alt="V" src="/svg/af0f6064540e84211d0ffe4dac72098adfa52845.svg">,
sowie (mit  ):
):

Dabei steht der eigentlich interessierende Teil hinter der Klammer und es
wird durch das Zeichen  im Sinne der Physik betont, dass das Integrationsgebiet
eine geschlossene Mannigfaltigkeit ist. Die erste der beiden angegebenen
Gleichungen enthält das Faradaysche Induktionsgesetz und das Gesetz von der
Nichtexistenz magnetischer Ladungen. In der letzten Gleichung ist das
Maxwell-Ampèresche Gesetz und das Gesetz von Gauß enthalten. Beide Gesetze eines
Paares gehören also jeweils zusammen. Das gaußsche Gesetz z.B. besagt in
der hier gegebenen abstrakten Formulierung: Der Fluss der elektromagnetischen
Form
im Sinne der Physik betont, dass das Integrationsgebiet
eine geschlossene Mannigfaltigkeit ist. Die erste der beiden angegebenen
Gleichungen enthält das Faradaysche Induktionsgesetz und das Gesetz von der
Nichtexistenz magnetischer Ladungen. In der letzten Gleichung ist das
Maxwell-Ampèresche Gesetz und das Gesetz von Gauß enthalten. Beide Gesetze eines
Paares gehören also jeweils zusammen. Das gaußsche Gesetz z.B. besagt in
der hier gegebenen abstrakten Formulierung: Der Fluss der elektromagnetischen
Form  durch den Rand der Mannigfaltigkeit V ist gleich der gesamten in V
enthaltenen „Ladung“, wie sie sich aus der Stromform
ergibt.
durch den Rand der Mannigfaltigkeit V ist gleich der gesamten in V
enthaltenen „Ladung“, wie sie sich aus der Stromform
ergibt.
Die angegebene Eichfreiheit ergibt sich geometrisch daraus, dass man zu
vorgegebenem Rand  viele verschiedene Mannigfaltigkeiten
finden kann, die darin „hineinpassen“.
viele verschiedene Mannigfaltigkeiten
finden kann, die darin „hineinpassen“.
Besondere Formulierungen und Spezialfälle
Maxwell-Gleichungen für konstante Frequenzen ω in komplexer Schreibweise
Die in den Maxwell-Gleichungen auftretenden Feldvektoren sind im Allgemeinen
nicht nur Funktionen des Ortes, sondern auch der Zeit, beispielsweise  .
In den partiellen Differentialgleichungen tritt dann neben den Ortsvariablen
auch die Zeitvariable auf. Zur vereinfachten Lösung dieser
Differentialgleichungen beschränkt man sich in der Praxis oft auf harmonische (sinusförmige)
Vorgänge. Diese Darstellung ist für die praktische Feldberechnung,
beispielsweise bei der Berechnung von elektromagnetischen Schirmen oder für die
Antennentechnik,
von wesentlicher Bedeutung.
.
In den partiellen Differentialgleichungen tritt dann neben den Ortsvariablen
auch die Zeitvariable auf. Zur vereinfachten Lösung dieser
Differentialgleichungen beschränkt man sich in der Praxis oft auf harmonische (sinusförmige)
Vorgänge. Diese Darstellung ist für die praktische Feldberechnung,
beispielsweise bei der Berechnung von elektromagnetischen Schirmen oder für die
Antennentechnik,
von wesentlicher Bedeutung.
Mit Hilfe der komplexen Schreibweise lässt sich die Zeitabhängigkeit bei
harmonischen Vorgängen vermeiden, da sich der komplexe Zeitfaktor  dabei heraushebt und so aus den Maxwell-Gleichungen eine Helmholtz-Gleichung
wird. Die in den Maxwell-Gleichungen auftretenden Feldgrößen sind dann komplexe
Amplituden und nur noch Funktionen des Ortes. An Stelle der partiellen
Differentiation nach der Zeit tritt die Multiplikation mit dem imaginären Faktor
dabei heraushebt und so aus den Maxwell-Gleichungen eine Helmholtz-Gleichung
wird. Die in den Maxwell-Gleichungen auftretenden Feldgrößen sind dann komplexe
Amplituden und nur noch Funktionen des Ortes. An Stelle der partiellen
Differentiation nach der Zeit tritt die Multiplikation mit dem imaginären Faktor
 .
Der Faktor
.
Der Faktor  wird auch als Kreisfrequenz
bezeichnet.
wird auch als Kreisfrequenz
bezeichnet.
Wie in der Elektrotechnik üblich, wird die imaginäre Einheit mit  bezeichnet (sie sollte nicht mit der häufig für die Stromdichte verwendeten
Variable
verwechselt werden) – in der Mathematik und theoretischen Physik wird sie meist
bezeichnet (sie sollte nicht mit der häufig für die Stromdichte verwendeten
Variable
verwechselt werden) – in der Mathematik und theoretischen Physik wird sie meist
 geschrieben.
geschrieben.
In komplexer Form – komplexe Größen sind zur Unterscheidung unterstrichen – lauten die Maxwell-Gleichungen in Differentialform:




Kovariante Formulierung der Maxwell-Gleichungen
- In diesem Absatz wird, wie im übrigen Artikel, das SI-Einheitensystem
verwendet. Dieses und die damit verbundenen Faktoren
 ,
etc. empfinden viele Theoretiker gerade bei der kovarianten Formulierung der
Elektrodynamik als unnatürlich und verwenden andere Systeme, etwa Gauß-Einheiten
oder Heaviside-Lorentz-Einheiten,
in denen die Grundgrößen der Elektrodynamik anders definiert werden. In der
Literatur können deshalb, verglichen mit dieser Darstellung, Vorfaktoren
wegfallen, hinzukommen oder an andere Stellen rücken.
,
etc. empfinden viele Theoretiker gerade bei der kovarianten Formulierung der
Elektrodynamik als unnatürlich und verwenden andere Systeme, etwa Gauß-Einheiten
oder Heaviside-Lorentz-Einheiten,
in denen die Grundgrößen der Elektrodynamik anders definiert werden. In der
Literatur können deshalb, verglichen mit dieser Darstellung, Vorfaktoren
wegfallen, hinzukommen oder an andere Stellen rücken.
Die Elektrodynamik, wie sie durch die Maxwell-Gleichungen beschrieben wird, ist im Gegensatz zur newtonschen Mechanik verträglich mit der speziellen Relativitätstheorie. Dazu gehört, dass die Maxwell-Gleichungen in jedem Inertialsystem gelten, ohne dass sich beim Wechsel des Bezugssystems ihre Form ändert. Das spielte historisch für die Entwicklung der Relativitätstheorie durch Albert Einstein eine wichtige Rolle.
Technischer formuliert sind die Maxwell-Gleichungen relativistisch kovariant oder forminvariant, das heißt, dass sie ihre Gestalt unter Lorentz-Transformationen nicht ändern.
Diese Eigenschaft ist den Maxwell-Gleichungen in der oben beschriebenen Form jedoch nicht ohne weiteres anzusehen. Es kann deshalb nützlich sein, durch eine Umformulierung der Theorie die Forminvarianz herauszuarbeiten, anders ausgedrückt: die Theorie „manifest kovariant“ zu schreiben.
Dazu ist es zweckmäßig, die oben auftretenden Größen ,
usw. durch Größen ausdrücken, die ein klar definiertes, einfaches
Transformationsverhalten unter Lorentz-Transformationen haben, also durch
Lorentz-Skalare,
Vierervektoren und
Vierer-Tensoren höherer Stufen.
Ausgangspunkt für diese Umformulierung bilden die elektromagnetischen
Potentiale
(skalares Potential)
und
(Vektorpotential), aus
denen man die elektrischen und magnetischen Felder durch


erhält (siehe auch Elektrodynamik). Diese Größen lassen sich zu einem Vierervektor, dem Viererpotential

zusammenfassen. Ebenso kann man aus Ladungsdichte
und Stromdichte
die Viererstromdichte zusammensetzen, mit
 .
.
Aus dem Viererpotential wird der elektrodynamische Feldstärketensor abgeleitet, dessen Komponenten bis auf Vorzeichen und konstante Vorfaktoren, die vom Einheitensystem abhängen, gerade die der elektrischen und magnetischen Felder sind. Er hat die Form
 .
.
Man definiert nun den Vierergradienten, die relativistische Form der Ableitung, als
 ,
also
,
also  ,
sowie die Differentiale
,
sowie die Differentiale  ,
die bei der Behandlung der Maxwell-Gleichungen im Artikel Differentialformen
benötigt werden, der an dieser Stelle auch empfohlen wird.
,
die bei der Behandlung der Maxwell-Gleichungen im Artikel Differentialformen
benötigt werden, der an dieser Stelle auch empfohlen wird.
Mit diesen Größen kann man die beiden inhomogenen Maxwell-Gleichungen im Vakuum durch die kovariante Gleichung

ersetzen. Dabei wird, wie üblich, die einsteinsche
Summenkonvention benutzt, das heißt, über doppelt auftretende Indizes in
Produkten (hier  )
wird summiert. Ferner erfolgt wie üblich das Herauf- und Herunterziehen von
Indizes mit dem metrischen
Tensor
)
wird summiert. Ferner erfolgt wie üblich das Herauf- und Herunterziehen von
Indizes mit dem metrischen
Tensor
 .
.
Man beachte, dass wegen der Antisymmetrie des Feldstärketensors auch die Kontinuitätsgleichung (Verschwinden der Vierer-Divergenz) folgt
 .
.
Die beiden homogenen Maxwell-Gleichungen erhalten im Vakuum die manifest kovariante Form

Das wird auch häufig mit dem Levi-Civita-Symbol kompakter geschrieben als

oder

mit dem dualen Feldstärketensor

dessen Komponenten man auch aus denen von  erhalten kann, indem man die Vektoren
erhalten kann, indem man die Vektoren  durch
und
durch
durch
und
durch  ersetzt. Also
ersetzt. Also
 .
.
Differentialformen
ermöglichen eine besonders übersichtliche Darstellung der Maxwell-Gleichungen,
die zudem automatisch kovariant ist. Dabei werden Viererpotential und
Viererstromdichte durch die 1-Formen
und
dargestellt, der Feldstärketensor durch die 2-Form  und sein Dual
durch die 2-Form
und sein Dual
durch die 2-Form  (das Symbol
steht bei Differentialformen für die Cartan-Ableitung). Die
Maxwell-Gleichungen im Vakuum lauten dann
(das Symbol
steht bei Differentialformen für die Cartan-Ableitung). Die
Maxwell-Gleichungen im Vakuum lauten dann

und
 .
.
Maxwell-Gleichungen unter Berücksichtigung hypothetischer magnetischer Monopole
Magnetische Monopole treten in einigen GUT-Theorien als mögliche oder notwendige Bestandteile auf. Mit ihnen ließe sich die Quantelung der elektrischen Ladung erklären, wie Paul Dirac schon 1931 erkannte. Bislang wurden magnetische Monopole nur als Quasiteilchen beobachtet. Reale Teilchen als Monopole wurden noch nicht gefunden. Daher wird in den oben genannten Maxwell-Gleichungen auch angenommen, dass keine magnetischen Monopole (magnetische Ladungen) existieren.
Sollten in der Zukunft dennoch solche magnetischen Ladungen gefunden werden, so lassen sich diese in den Maxwell-Gleichungen problemlos berücksichtigen.
Setzt man  für die Monopolladungsdichte,
für die Monopolladungsdichte,  für die Stromdichte und
für die Stromdichte und  für die Geschwindigkeit der sich bewegenden magnetischen Monopolladungen, so
ändern sich nur zwei der vier oben genannten Gleichungen in differentieller Form
zu
für die Geschwindigkeit der sich bewegenden magnetischen Monopolladungen, so
ändern sich nur zwei der vier oben genannten Gleichungen in differentieller Form
zu

Interpretation: Die Feldlinien der magnetischen Flussdichte beginnen und enden in einer magnetischen Ladung.

Interpretation: Sich zeitlich ändernde magnetische Flussdichten oder das Vorhandensein von magnetischen Stromdichten führen zu elektrischen Wirbelfeldern.
Die anderen beiden Gleichungen bleiben unverändert, während sich aber natürlich für die beiden neuen differentiellen (d.h. lokalen) Gleichungen auch neue integrale (d.h. globalen) Darstellungen ergeben, die aber ohne weiteres mit den Integralsätzen von Gauß und Stokes berechnet werden können.
Der Fall der verschwindenden Monopole  führt wieder auf die bekannten, oben angegebenen Gleichungen zurück.
führt wieder auf die bekannten, oben angegebenen Gleichungen zurück.
Maxwell-Gleichungen und Photonmasse
Die Photonmasse verschwindet gemäß
der Maxwell-Gleichungen. Diese Gleichungen sind der Grenzfall  der allgemeineren Maxwell-Proca-Gleichungen
mit einer nicht negativen Masse
der allgemeineren Maxwell-Proca-Gleichungen
mit einer nicht negativen Masse  der Austauschteilchen (im elektromagnetischen Fall der Photonen). Statt des Coulomb-Potentials
der Austauschteilchen (im elektromagnetischen Fall der Photonen). Statt des Coulomb-Potentials
 bewirkt in der Maxwell-Proca-Theorie eine Punktladung
bewirkt in der Maxwell-Proca-Theorie eine Punktladung
 das Yukawa-Potential
das Yukawa-Potential
 ,[6]
und hat nur noch eine Reichweite von etwa der Compton-Wellenlänge
,[6]
und hat nur noch eine Reichweite von etwa der Compton-Wellenlänge
 .[7]
.[7]
Historische Bemerkungen
Maxwell veröffentlichte seine Gleichungen 1865 (Eine
dynamische Theorie des elektromagnetischen Feldes).
In diesem System von ursprünglich zwanzig Gleichungen waren allerdings auch
solche enthalten, die Definitionen enthielten und Gleichungen, die heute nicht
mehr zu den eigentlichen Maxwellgleichungen gezählt werden (wie die
Kontinuitätsgleichung aufgrund der Ladungserhaltung und Vorformen der
Lorentzkraft). Bei den zwanzig Gleichungen wurden auch die jeweils drei
Komponenten mitgezählt, die heute in einer Vektorgleichung zusammengefasst
werden. Im Jahr 1873 findet sich in Maxwells A
Treatise on Electricity and Magnetism in Band 2 (Teil 4, Kapitel 9) eine
etwas abgewandelte Aufzählung, die aber noch weitgehend der Liste von 1865
entspricht. Zusätzlich brachte Maxwell seine Gleichungen in eine quaternionische Darstellung,
eine damals besonders in Großbritannien beliebte Alternative zum
Vektorkalkül.
Im Zuge dessen hat Maxwell auch das magnetische Potenzialfeld  und die magnetische Masse
in seine Gleichungen eingeführt und diese Feldvariablen in die Gleichung für die
elektromagnetische Kraft
und die magnetische Masse
in seine Gleichungen eingeführt und diese Feldvariablen in die Gleichung für die
elektromagnetische Kraft  eingefügt. Maxwell rechnete allerdings nicht direkt in dieser quaternionischen
Notation, sondern behandelte den Skalarteil und den Vektorteil getrennt.
eingefügt. Maxwell rechnete allerdings nicht direkt in dieser quaternionischen
Notation, sondern behandelte den Skalarteil und den Vektorteil getrennt.
Die heute gängigen Vektor-Notationen wurden erst später von Oliver Heaviside und unabhängig Josiah Willard Gibbs und Heinrich Hertz auf der Grundlage der ursprünglichen Maxwell-Gleichungen von 1865 formuliert. Dabei schränkten sie auch das ursprüngliche System auf (in Vektornotation) vier Gleichungen ein. Diese sind einfacher zu lesen und in den meisten Fällen auch einfacher anzuwenden, weshalb sie auch heute noch üblich sind.
Maxwell-Gleichungen in natürlichen Einheitssystemen
In natürlichen Einheitensystemen fallen die Naturkonstanten weg.
Gaußsches Einheitensystem
Da das Gaußsche Einheitensystem auf dem CGS-System basiert, können nicht alle Naturkonstanten gekürzt werden.
In einer verbreiteten Version des gaußschen CGS-Systems lauten die Maxwell-Gleichungen:
| Durchflutungsgesetz | 
|
| Induktionsgesetz | 
|
| Gaußsches Gesetz | 
|
| Gaußsches Gesetz des Magnetismus |
|
So werden die Maxwell-Gleichungen zum Beispiel im bekannten Lehrbuch von Jackson (das daneben noch das Internationale Einheitensystem (SI) benutzt) geschrieben. Daneben gibt es auch Versionen des gaußschen cgs-Systems, die eine andere Definition der Stromstärke benutzen und in denen das Durchflutungsgesetz lautet (z.B. im verbreiteten Lehrbuch von Panofsky und Phillips:)

Für die Potenziale wird im cgs-System gesetzt:
 sowie
sowie 
Ferner gilt
 und
und 
Systematisches Transformationsverhalten (SI ↔ cgs)
Man kann in wenigen Zeilen das Transformationsverhalten zwischen SI- und
cgs-Systemen systematisch beschreiben, obwohl die Transformationen schon deshalb
nicht ganz trivial sind, weil das letztgenannte System drei Basisgrößen
(„Länge“, „Masse“, „Zeit“), das erstgenannte System aber vier davon hat
(zusätzlich noch die „elektrische Stromstärke“).
Im cgs-System üben zwei gleich geladene Punktmassen, deren Abstand  beträgt, aufeinander die Coulomb-Kraft
beträgt, aufeinander die Coulomb-Kraft  aus, während im SI die gleiche Kraft
aus, während im SI die gleiche Kraft  beträgt.
beträgt.
- Es gilt also erstens:
 Nach einem ganz analogen Gesetz transformiert sich auch das elektrische
Moment
Nach einem ganz analogen Gesetz transformiert sich auch das elektrische
Moment  bzw. die elektrische Polarisation (elektrisches Moment pro Volumen)
bzw. die elektrische Polarisation (elektrisches Moment pro Volumen)
 sowie die elektrische Stromdichte
sowie die elektrische Stromdichte  Die elektrische Feldstärke dagegen transformiert sich komplementär zu ,
weil das Produkt „Ladung mal Feldstärke“ invariant sein muss.
Die elektrische Feldstärke dagegen transformiert sich komplementär zu ,
weil das Produkt „Ladung mal Feldstärke“ invariant sein muss. - Zweitens gilt:

- Drittens ist:
 (weil im Vakuum
(weil im Vakuum  aber
aber  ist.)
ist.)
Für die entsprechenden magnetischen Größen (erstens: das magnetische
Moment
bzw. die magnetische Polarisation  (Zusammenhang:
(Zusammenhang:  ),
zweitens: die magnetische Feldstärke ,
drittens: die magnetische Induktion )
gelten ähnliche Gesetze, in denen
an die Stelle von
tritt.
),
zweitens: die magnetische Feldstärke ,
drittens: die magnetische Induktion )
gelten ähnliche Gesetze, in denen
an die Stelle von
tritt.
Sowohl das Durchflutungsgesetz als auch Faradays Induktionsgesetz koppeln
aber elektrische und magnetische Größen. An dieser Stelle kommt die
Lichtgeschwindigkeit  ins Spiel, und zwar durch die fundamentale Beziehung
ins Spiel, und zwar durch die fundamentale Beziehung 
Wenn man z.B. das Durchflutungsgesetz betrachtet, das im SI
folgendermaßen lautet:  so erhält man im cgs-System die erste der gerade in der Tabelle angegebenen
Gleichungen.
so erhält man im cgs-System die erste der gerade in der Tabelle angegebenen
Gleichungen.
Heaviside-Lorentz-Einheitensystem
Da das Heaviside-Lorentz-Einheitensystem
rationalisiert ist, fallen die -Faktoren
weg. Kombiniert mit dem Planck-Einheitensystem
enthalten die Maxwell-Gleichungen keine Konstanten:
| HLE | kombiniert mit Planck-Einheiten | |
|---|---|---|
| Durchflutungsgesetz | 
|

|
| Induktionsgesetz |
|
|
| Gaußsches Gesetz |
|
|
| Gaußsches Gesetz des Magnetismus |
|
|
Literatur
- Richard Becker, Fritz Sauter: Theorie der Elektrizität. Band 1 (Einführung in die Maxwellsche Theorie, Elektronentheorie, Relativitätstheorie). Teubner, Stuttgart 1969.
- John David Jackson: Classical Electrodynamics. John Wiley, New York NY 1962 (3. edition. Pearson Addison-Wesley, San Francisco CA u.a. 1999, ISBN 0-471-30932-X; deutsch: 4. überarbeitete Auflage. de Gruyter, Berlin u.a. 2006, ISBN 3-11-018970-4).
- Lew Landau, Jewgeni Lifschitz: Theoretische Physik. Band 2: Klassische Feldtheorie. 12. überarbeitete Auflage. Deutsch, Thun u.a. 1997, ISBN 3-8171-1327-7.
- Wolfgang Panofsky, Melba Phillips: Classical Electricity and Magnetism. Addison-Wesley, Reading MA 1955 (2. edition. Dover, Mineola NY 2005, ISBN 0-486-43924-0).
- Károly Simonyi: Theoretische Elektrotechnik. 10. Auflage. Barth, Leipzig u.a. 1993, ISBN 3-335-00375-6.
Anmerkungen
- ↑ Diese mikroskopischen Prozesse werden im Allgemeinen durch die Quantenmechanik beschrieben, wobei im Falle des Spinmagnetismus sogar die relativistische Form der Quantenmechanik, die sogenannte Dirac-Gleichung, herangezogen werden muss.
- ↑ a
b
Das eingeklammerte Doppelintegral ist Null, wenn
die magnetische bzw. elektrische Induktion konstant bleibt. Auch in diesem
Fall ergibt sich aber ein elektromotorischer Effekt, wenn in der betrachteten
Zeit
 eine Änderung der Integrationsfläche
auftritt, die zu einer Lorentzkraft
führt.
eine Änderung der Integrationsfläche
auftritt, die zu einer Lorentzkraft
führt.
Siehe dazu die zweite der im unmittelbar folgenden Abschnitt angegebenen Gleichungen. - ↑
In der Physikliteratur, und wenn aus dem
Zusammenhang eindeutig erkennbar, wird die Leitungsstromdichte
 meist als
bezeichnet. In der Elektrotechnik ist die Bezeichnung
üblich.
meist als
bezeichnet. In der Elektrotechnik ist die Bezeichnung
üblich. - ↑ Die Dualitätsoperation vertauscht u.a. kovariante und kontravariante Vektor-Komponenten, sie hängt somit vom metrischen Tensor ab.
- ↑
An dieser Stelle wird in Kauf genommen, dass
mit der gleich benannten Größe „magnetische Polarisation“
 verwechselt werden kann (siehe oben)
verwechselt werden kann (siehe oben) - ↑
mit der Konvention
 wird daraus
wird daraus 
- ↑
mit der reduzierten Compton-Wellenlänge
 vereinfacht sich das Yukawa-Potential zu
vereinfacht sich das Yukawa-Potential zu 


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 12.03. 2021