Tensor
Ein Tensor ist eine lineare mathematische Funktion, die eine bestimmte Anzahl von Vektoren auf einen Zahlenwert abbildet. Er ist ein mathematisches Objekt aus der linearen Algebra, das besonders im Bereich der Differentialgeometrie Anwendung findet. Der Begriff wurde ursprünglich in der Physik eingeführt und erst später mathematisch präzisiert.
In der Differentialgeometrie und den physikalischen Disziplinen werden meist keine Tensoren im Sinn der linearen Algebra betrachtet, sondern es werden Tensorfelder behandelt, die oft vereinfachend ebenfalls als Tensoren bezeichnet werden. Ein Tensorfeld ist eine Abbildung, die jedem Punkt des Raums einen Tensor zuordnet. Viele physikalische Feldtheorien handeln von Tensorfeldern. Das prominenteste Beispiel ist die allgemeine Relativitätstheorie. Das mathematische Teilgebiet, das sich mit der Untersuchung von Tensorfeldern befasst, heißt Tensoranalysis und ist ein wichtiges Werkzeug in den physikalischen und ingenieurwissenschaftlichen Disziplinen.
Begriffsgeschichte
Das Wort Tensor (abgeleitet vom Partizip Perfekt von lateinisch tendere ‚spannen‘) wurde in den 1840er Jahren von William Rowan Hamilton in die Mathematik eingeführt; er bezeichnete damit den Absolutbetrag seiner Quaternionen, also keinen Tensor im modernen Sinn. James Clerk Maxwell scheint den Spannungstensor, den er aus der Elastizitätstheorie in die Elektrodynamik übertrug, selbst noch nicht so genannt zu haben.
In seiner modernen Bedeutung, als Verallgemeinerung von Skalar, Vektor, Matrix, wird das Wort Tensor erstmals von Woldemar Voigt in seinem Buch Die fundamentalen physikalischen Eigenschaften der Krystalle in elementarer Darstellung (Leipzig, 1898) eingeführt.
Unter dem Titel absolute Differentialgeometrie entwickelten Gregorio Ricci-Curbastro und dessen Schüler Tullio Levi-Civita um 1890 die Tensorrechnung auf riemannschen Mannigfaltigkeiten; einem größeren Fachpublikum machten sie ihre Ergebnisse 1900 mit dem Buch Calcolo differenziale assoluto zugänglich, das bald in andere Sprachen übersetzt wurde, und aus dem sich Albert Einstein die mathematischen Grundlagen aneignete, die er zur Formulierung der allgemeinen Relativitätstheorie benötigte. Einstein selbst prägte 1916 den Begriff Tensoranalysis und trug mit seiner Theorie maßgeblich dazu bei, den Tensorkalkül bekannt zu machen; er führte überdies die einsteinsche Summenkonvention ein, nach der über doppelt auftretende Indizes unter Weglassung der Summenzeichen summiert wird.
Arten von Tensoren
Ausgehend von einem endlichdimensionalen Vektorraum bezeichnet man Skalare als
Tensoren vom Typ  ,
Spaltenvektoren als Tensoren vom Typ
,
Spaltenvektoren als Tensoren vom Typ  und Kovektoren
(bzw. Zeilenvektoren) als Tensoren vom Typ
und Kovektoren
(bzw. Zeilenvektoren) als Tensoren vom Typ  .
Tensoren höherer Stufe definiert man als multilineare
Abbildungen mit Tensoren geringerer Stufe als Argumente und Abbildungswerte.
So kann etwa ein Tensor vom Typ
.
Tensoren höherer Stufe definiert man als multilineare
Abbildungen mit Tensoren geringerer Stufe als Argumente und Abbildungswerte.
So kann etwa ein Tensor vom Typ als lineare Abbildung zwischen Vektorräumen oder als bilineare Abbildung
mit einem Vektor und einem Kovektor als Argumente aufgefasst werden.
als lineare Abbildung zwischen Vektorräumen oder als bilineare Abbildung
mit einem Vektor und einem Kovektor als Argumente aufgefasst werden.
Beispielsweise ist der mechanische Spannungstensor
in der Physik ein Tensor zweiter Stufe – eine Zahl (Stärke der Spannung) oder ein
Vektor (eine Hauptspannungsrichtung)
reichen nicht immer zur Beschreibung des Spannungszustandes eines Körpers aus. Als
Tensor vom Typ  aufgefasst ist er eine lineare Abbildung, die einem Flächenelement (als Vektor)
die darauf wirkende Kraft (als Kovektor) zuordnet, oder eine bilineare
Abbildung, die einem Flächenelement und einem Verschiebungsvektor die Arbeit
zuordnet, die bei der Verschiebung des Flächenstücks unter dem Einfluss der
wirkenden Spannung verrichtet wird.
aufgefasst ist er eine lineare Abbildung, die einem Flächenelement (als Vektor)
die darauf wirkende Kraft (als Kovektor) zuordnet, oder eine bilineare
Abbildung, die einem Flächenelement und einem Verschiebungsvektor die Arbeit
zuordnet, die bei der Verschiebung des Flächenstücks unter dem Einfluss der
wirkenden Spannung verrichtet wird.
Bezüglich einer fest gewählten Vektorraumbasis erhält man die folgenden Darstellungen der verschiedenen Typen von Tensoren:
- Ein Skalar durch eine einzelne Zahl.
- Ein Vektor durch einen Spaltenvektor.
- Ein Kovektor durch einen Zeilenvektor.
- Ein Tensor zweiter Stufe durch eine Matrix.
Die Anwendung des Spannungstensors auf ein Flächenelement ist dann z.B.
durch das Produkt einer Matrix mit einem Spaltenvektor gegeben. Die Koordinaten
von Tensoren höherer Stufe können entsprechend in ein höherdimensionales Schema
angeordnet werden. So können diese Komponenten eines Tensors anders als die
eines Spaltenvektors oder einer Matrix mehr als ein oder zwei Indizes haben. Ein
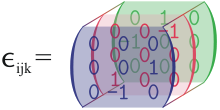
Beispiel für einen Tensor dritter Stufe, der drei Vektoren des  als Argumente hat, ist die Determinante einer 3×3-Matrix als Funktion der
Spalten dieser Matrix. Bezüglich einer Orthonormalbasis
wird er durch das Levi-Civita-Symbol
als Argumente hat, ist die Determinante einer 3×3-Matrix als Funktion der
Spalten dieser Matrix. Bezüglich einer Orthonormalbasis
wird er durch das Levi-Civita-Symbol
 repräsentiert.
repräsentiert.
Ko- und Kontravarianz von Vektoren
Die Begriffe ko- und kontravariant beziehen sich auf die Koordinatendarstellungen von Vektoren, Linearformen und werden auch wie später im Artikel beschrieben auf Tensoren angewandt. Sie beschreiben, wie sich solche Koordinatendarstellungen bezüglich eines Basiswechsels im zugrundeliegenden Vektorraum verhalten.
Legt man in einem  -dimensionalen
Vektorraum
-dimensionalen
Vektorraum  eine Basis
eine Basis  fest, so kann jeder Vektor
fest, so kann jeder Vektor  dieses Raumes durch ein Zahlentupel
dieses Raumes durch ein Zahlentupel  – seine Koordinaten – mittels
– seine Koordinaten – mittels  dargestellt werden. Geht man zu einer anderen Basis von
über, so ändert sich der Vektor selbst nicht, aber die Koordinaten bezüglich der
neuen Basis werden andere sein. Ist also die neue Basis durch
dargestellt werden. Geht man zu einer anderen Basis von
über, so ändert sich der Vektor selbst nicht, aber die Koordinaten bezüglich der
neuen Basis werden andere sein. Ist also die neue Basis durch  in der alten Basis bestimmt, so ergeben sich die neuen Koordinaten durch
Vergleich in
in der alten Basis bestimmt, so ergeben sich die neuen Koordinaten durch
Vergleich in

also  oder
oder
 .
.
Dreht man zum Beispiel eine orthogonale Basis in einem dreidimensionalen
euklidischen Raum
um  um die
um die  -Achse,
so drehen sich die Koordinatenvektoren im Koordinatenraum
ebenfalls um die -Achse,
aber in der entgegengesetzten Richtung um
-Achse,
so drehen sich die Koordinatenvektoren im Koordinatenraum
ebenfalls um die -Achse,
aber in der entgegengesetzten Richtung um  .
Dieses der Basistransformation entgegengesetzte Transformationsverhalten nennt
man kontravariant. Oft werden Vektoren zur Abkürzung der Notation mit
ihren Koordinatenvektoren identifiziert, sodass Vektoren allgemein als
kontravariant bezeichnet werden.
.
Dieses der Basistransformation entgegengesetzte Transformationsverhalten nennt
man kontravariant. Oft werden Vektoren zur Abkürzung der Notation mit
ihren Koordinatenvektoren identifiziert, sodass Vektoren allgemein als
kontravariant bezeichnet werden.
Eine Linearform oder ein Kovektor  ist dagegen eine skalarwertige lineare Abbildung
ist dagegen eine skalarwertige lineare Abbildung  auf dem Vektorraum. Man kann ihr als Koordinaten ihre Werte auf den
Basisvektoren,
auf dem Vektorraum. Man kann ihr als Koordinaten ihre Werte auf den
Basisvektoren,  ,
zuordnen. Die Koordinatenvektoren einer Linearform transformieren sich wie das
Basistupel als
,
zuordnen. Die Koordinatenvektoren einer Linearform transformieren sich wie das
Basistupel als

weshalb man dieses Transformationsverhalten kovariant nennt. Identifiziert man wieder Linearformen mit ihren Koordinatenvektoren, so bezeichnet man auch allgemein Linearformen als kovariant. Hierbei geht, wie bei Vektoren, die zugrundeliegende Basis aus dem Kontext hervor. Man spricht in diesem Kontext auch von Dualvektoren.
Diese Bezeichnungen werden auf Tensoren übertragen. Dies wird im nächsten
Abschnitt zur Definition der  -Tensoren
erklärt.
-Tensoren
erklärt.
Definition
(r,s)-Tensorraum
Im Folgenden sind alle Vektorräume endlichdimensional. Mit  bezeichne man die Menge aller Linearformen
aus dem
bezeichne man die Menge aller Linearformen
aus dem  -Vektorraum
-Vektorraum
 in den Körper
.
Sind
in den Körper
.
Sind  Vektorräume über ,
so werde der Vektorraum der Multilinearformen
Vektorräume über ,
so werde der Vektorraum der Multilinearformen
 mit
mit  bezeichnet.
bezeichnet.
Ist
ein -Vektorraum, so wird mit
 sein Dualraum bezeichnet. Dann ist
sein Dualraum bezeichnet. Dann ist
 isomorph zum Tensorprodukt
isomorph zum Tensorprodukt
 (vergleiche hierzu den Abschnitt Tensorprodukte
und Multilinearformen).
(vergleiche hierzu den Abschnitt Tensorprodukte
und Multilinearformen).
Setze nun für einen fixierten Vektorraum
mit Dualraum

mit  Einträgen von
und
Einträgen von
und  Einträgen von .
Dieser Vektorraum realisiert das Tensorprodukt
Einträgen von .
Dieser Vektorraum realisiert das Tensorprodukt

Elemente dieser Menge heißen Tensoren, kontravariant der Stufe
und kovariant der Stufe .
Kurz spricht man von Tensoren vom Typ .
Die Summe  heißt Stufe oder Rang des Tensors.
heißt Stufe oder Rang des Tensors.
Es gibt natürliche Isomorphismen der folgenden Art:

Das heißt, man kann Tensoren der Stufe  auch induktiv
als multilineare
Abbildungen zwischen Tensorräumen geringerer Stufe definieren. Dabei hat man
für einen Tensor eines bestimmten Typs mehrere äquivalente Möglichkeiten.
auch induktiv
als multilineare
Abbildungen zwischen Tensorräumen geringerer Stufe definieren. Dabei hat man
für einen Tensor eines bestimmten Typs mehrere äquivalente Möglichkeiten.
In der Physik sind die Vektorräume in der Regel nicht identisch, z.B.
kann man einen Geschwindigkeitsvektor und einen Kraftvektor nicht addieren. Man
kann jedoch die Richtungen miteinander vergleichen, d.h., die Vektorräume
bis auf einen skalaren
Faktor miteinander identifizieren. Daher kann die Definition von Tensoren
des Typs
entsprechend angewendet werden. Es sei außerdem erwähnt, dass
(dimensionsbehaftete) Skalare in der Physik Elemente aus eindimensionalen
Vektorräumen sind und dass Vektorräume mit Skalarprodukt
mit ihrem Dualraum identifiziert werden können. Man arbeitet z.B. mit
Kraftvektoren, obwohl Kräfte ohne die Verwendung des Skalarprodukts als
Kovektoren anzusehen sind.
Äußeres Tensorprodukt
Als (äußeres) Tensorprodukt oder Tensormultiplikation
bezeichnet man eine Verknüpfung  zwischen zwei Tensoren. Sei
ein Vektorraum und seien
zwischen zwei Tensoren. Sei
ein Vektorraum und seien  und
und  Tensoren. Das (äußere) Tensorprodukt von
Tensoren. Das (äußere) Tensorprodukt von  und
und  ist der Tensor
ist der Tensor  ,
der durch
,
der durch

definiert ist. Hierbei sind die  und die
und die  .
.
Beispiele von (r,s)-Tensoren
Im Folgenden seien
und  endlichdimensionale Vektorräume.
endlichdimensionale Vektorräume.
- Die Menge der (0,0)-Tensoren ist isomorph zum zugrunde liegenden Körper
.
Sie ordnen keiner Linearform und keinem Vektor ein Körperelement zu. Deshalb
die Bezeichnung als (0,0)-Tensoren.
- (0,1)-Tensoren ordnen keiner Linearform und einem Vektor eine Zahl zu,
entsprechen somit den Linearformen
 auf .
auf . - (1,0)-Tensoren ordnen einer Linearform und keinem Vektor eine Zahl zu. Sie
sind somit Elemente des bidualen Vektorraums
 .
Sie entsprechen bei endlichdimensionalen den Ausgangsvektorräumen ,
da hier
.
Sie entsprechen bei endlichdimensionalen den Ausgangsvektorräumen ,
da hier  gilt (siehe Isomorphismus).
gilt (siehe Isomorphismus). - Eine lineare
Abbildung
 zwischen endlichdimensionalen Vektorräumen kann als Element von
zwischen endlichdimensionalen Vektorräumen kann als Element von  aufgefasst werden und ist dann ein (1,1)-Tensor.
aufgefasst werden und ist dann ein (1,1)-Tensor. - Eine Bilinearform
 lässt sich als ein Element von
lässt sich als ein Element von  auffassen, also als ein (0,2)-Tensor. Insbesondere lassen sich also Skalarprodukte als
(0,2)-Tensor auffassen.
auffassen, also als ein (0,2)-Tensor. Insbesondere lassen sich also Skalarprodukte als
(0,2)-Tensor auffassen. - Das Kronecker-Delta
 ist wieder ein (0,2)-Tensor. Es ist ein Element von
und somit eine multilineare Abbildung
ist wieder ein (0,2)-Tensor. Es ist ein Element von
und somit eine multilineare Abbildung  .
Multilineare Abbildungen sind durch die Wirkung auf die Basisvektoren
eindeutig bestimmt. So ist das Kronecker-Delta eindeutig durch
.
Multilineare Abbildungen sind durch die Wirkung auf die Basisvektoren
eindeutig bestimmt. So ist das Kronecker-Delta eindeutig durch
-
- bestimmt.

- Die Determinante
von
 -Matrizen,
aufgefasst als alternierende Multilinearform der Spalten, ist ein
(0,n)-Tensor. Bezüglich einer Orthonormalbasis wird er durch das Levi-Civita-Symbol
(„Epsilontensor“) dargestellt. Speziell in drei Dimensionen ist die
Determinante
-Matrizen,
aufgefasst als alternierende Multilinearform der Spalten, ist ein
(0,n)-Tensor. Bezüglich einer Orthonormalbasis wird er durch das Levi-Civita-Symbol
(„Epsilontensor“) dargestellt. Speziell in drei Dimensionen ist die
Determinante  ein Tensor dritter Stufe und es gilt
ein Tensor dritter Stufe und es gilt  für die Elemente einer Orthonormalbasis. Sowohl das Kronecker-Delta als auch
das Levi-Civita-Symbol werden häufig verwendet, um Symmetrieeigenschaften von
Tensoren zu untersuchen. Das Kronecker-Delta ist symmetrisch bei
Vertauschungen der Indizes, das Levi-Civita-Symbol antisymmetrisch, sodass man
mit ihrer Hilfe Tensoren in symmetrische und antisymmetrische Anteile zerlegen
kann.
für die Elemente einer Orthonormalbasis. Sowohl das Kronecker-Delta als auch
das Levi-Civita-Symbol werden häufig verwendet, um Symmetrieeigenschaften von
Tensoren zu untersuchen. Das Kronecker-Delta ist symmetrisch bei
Vertauschungen der Indizes, das Levi-Civita-Symbol antisymmetrisch, sodass man
mit ihrer Hilfe Tensoren in symmetrische und antisymmetrische Anteile zerlegen
kann. - Ein weiteres Beispiel für einen kovarianten Tensor 2. Stufe ist der Trägheitstensor.
- In der Elastizitätstheorie verallgemeinert man die hookesche Gleichung über den Zusammenhang zwischen Kräften und zugehörigen Dehnungen und Verzerrungen in einem elastischen Medium ebenfalls mit Hilfe der Tensorrechnung durch Einführung des Verzerrungstensors, der Verzerrungen, Deformationen beschreibt, und des Spannungstensors, der die die Deformationen verursachenden Kräfte beschreibt. Siehe dazu auch unter Kontinuumsmechanik nach.
- Sei
 ein Vektorraum mit Skalarprodukt
ein Vektorraum mit Skalarprodukt
 .
Wie oben bereits erwähnt, ist das Skalarprodukt
linear in beiden Argumenten, also ein (0,2)-Tensor bzw. ein zweifach
kovarianter Tensor. Man spricht auch von einem metrischen Tensor
oder kurz von einer „Metrik“. Dabei ist zu beachten, dass
selbst keine Metrik im Sinne eines metrischen
Raums ist, aber eine solche erzeugt. Mit
.
Wie oben bereits erwähnt, ist das Skalarprodukt
linear in beiden Argumenten, also ein (0,2)-Tensor bzw. ein zweifach
kovarianter Tensor. Man spricht auch von einem metrischen Tensor
oder kurz von einer „Metrik“. Dabei ist zu beachten, dass
selbst keine Metrik im Sinne eines metrischen
Raums ist, aber eine solche erzeugt. Mit  werden die Koordinaten der Metrik bezüglich einer Basis des Vektorraums
bezeichnet;
werden die Koordinaten der Metrik bezüglich einer Basis des Vektorraums
bezeichnet;  und
und  seien die Koordinaten der Vektoren
seien die Koordinaten der Vektoren  und
und  bezüglich derselben Basis. Für die Abbildung zweier Vektoren
und
unter der Metrik
gilt deshalb
bezüglich derselben Basis. Für die Abbildung zweier Vektoren
und
unter der Metrik
gilt deshalb
-
- Der Übergang zwischen ko- und kontravarianten Tensoren lässt sich mittels
der Metrik durch
- bewerkstelligen.
- In der Differentialgeometrie auf riemannschen Mannigfaltigkeiten ist diese Metrik zusätzlich eine Funktion des Ortes. Eine tensorwertige Funktion des Ortes wird Tensorfeld genannt, im Fall des metrischen Tensors speziell riemannsche Metrik.


- In der Theorie der pseudo-riemannschen Mannigfaltigkeiten wird der Begriff des metrischen Tensors dahingehend verallgemeinert, dass auf die Definitheit des Skalarprodukts verzichtet wird. Wichtigste Anwendung ist die Relativitätstheorie. In der speziellen Relativitätstheorie verwendet man statt der euklidischen Metrik die uneigentliche Metrik des Minkowskiraumes. In der allgemeinen Relativitätstheorie wird ein Tensorfeld mit derselben Signatur wie die Minkowski-Metrik verwendet.
Basis
Basis und Dimension
Sei
wie oben ein Vektorraum, dann sind die Räume  ebenfalls Vektorräume. Weiterhin sei
nun endlichdimensional mit der Basis
ebenfalls Vektorräume. Weiterhin sei
nun endlichdimensional mit der Basis
 .
Die duale Basis wird mit
.
Die duale Basis wird mit  bezeichnet. Der Raum
der Tensoren ist dann ebenfalls endlichdimensional und
bezeichnet. Der Raum
der Tensoren ist dann ebenfalls endlichdimensional und

ist eine Basis dieses Raumes. Das heißt, jedes Element  kann durch
kann durch

dargestellt werden. Die Dimension dieses Vektorraums ist  .
Wie in jedem endlichdimensionalen Vektorraum reicht es auch im Raum der Tensoren
zu sagen, wie eine Funktion auf der Basis operiert.
.
Wie in jedem endlichdimensionalen Vektorraum reicht es auch im Raum der Tensoren
zu sagen, wie eine Funktion auf der Basis operiert.
Da die obige Summendarstellung sehr viel Schreibarbeit mit sich bringt, wird oft die einsteinsche Summenkonvention verwendet. In diesem Fall schreibt man also

Die Koeffizienten  werden Komponenten des Tensors bezüglich der Basis
genannt. Oft identifiziert man die Komponenten des Tensors mit dem Tensor an
sich. Siehe dafür unter Tensordarstellungen
der Physik nach.
werden Komponenten des Tensors bezüglich der Basis
genannt. Oft identifiziert man die Komponenten des Tensors mit dem Tensor an
sich. Siehe dafür unter Tensordarstellungen
der Physik nach.
Basiswechsel und Koordinatentransformation
Seien  und
und  jeweils unterschiedliche Basen der Vektorräume
jeweils unterschiedliche Basen der Vektorräume  .
Jeder Vektor, also auch jeder Basisvektor
.
Jeder Vektor, also auch jeder Basisvektor  kann als Linearkombination der Basisvektoren
kann als Linearkombination der Basisvektoren  dargestellt werden. Der Basisvektor
dargestellt werden. Der Basisvektor  werde dargestellt durch
werde dargestellt durch

Die Größen  bestimmen also die Basistransformation zwischen den Basen
bestimmen also die Basistransformation zwischen den Basen  und .
Das gilt für alle
und .
Das gilt für alle  .
Dieses Verfahren wird Basiswechsel
genannt.
.
Dieses Verfahren wird Basiswechsel
genannt.
Ferner seien  die Komponenten des Tensors
die Komponenten des Tensors  bezüglich der Basis
bezüglich der Basis  .
Dann ergibt sich für das Transformationsverhalten der Tensorkomponenten die
Gleichung
.
Dann ergibt sich für das Transformationsverhalten der Tensorkomponenten die
Gleichung

Es wird in der Regel zwischen der Koordinatendarstellung des Tensors  und der Transformationsmatrix
und der Transformationsmatrix  unterschieden. Die Transformationsmatrix
ist zwar eine indizierte Größe, aber kein Tensor. Im euklidischen Raum sind das
Drehmatrizen und in der speziellen Relativitätstheorie z.B. Lorentz-Transformationen,
die sich auch als „Drehungen“ in einem vierdimensionalen Minkowskiraum auffassen
lassen. Man spricht in diesem Fall auch von Vierertensoren
und Vierervektoren.
unterschieden. Die Transformationsmatrix
ist zwar eine indizierte Größe, aber kein Tensor. Im euklidischen Raum sind das
Drehmatrizen und in der speziellen Relativitätstheorie z.B. Lorentz-Transformationen,
die sich auch als „Drehungen“ in einem vierdimensionalen Minkowskiraum auffassen
lassen. Man spricht in diesem Fall auch von Vierertensoren
und Vierervektoren.
Beispiel
Mit Hilfe der Komponenten kann ein Tensor bezüglich einer Basis dargestellt
werden. Beispielsweise kann ein Tensor
mit Rang 2 in einem gegebenen Basissystem  wie folgt als Matrix dargestellt werden:
wie folgt als Matrix dargestellt werden:

Dadurch lässt sich der Wert  im Rahmen des entsprechenden Basissystems mit Hilfe der Matrixmultiplikation
berechnen:
im Rahmen des entsprechenden Basissystems mit Hilfe der Matrixmultiplikation
berechnen:

Betrachtet man nun konkret den Trägheitstensor
 ,
so kann mit ihm bezüglich eines gewählten Koordinatensystems die Rotationsenergie
,
so kann mit ihm bezüglich eines gewählten Koordinatensystems die Rotationsenergie  eines starren Körpers mit der Winkelgeschwindigkeit
eines starren Körpers mit der Winkelgeschwindigkeit
 wie folgt berechnet werden:
wie folgt berechnet werden:

Operationen auf Tensoren
Neben dem Tensorprodukt gibt es für (r,s)-Tensoren weitere wichtige Operationen.
Inneres Produkt
Das innere Produkt eines Vektors  (bzw. eines (Ko-)Vektors
(bzw. eines (Ko-)Vektors  )
mit einem Tensor
)
mit einem Tensor  ist der
ist der  (bzw.
(bzw.  )-Tensor,
der durch
)-Tensor,
der durch

bzw. durch

definiert ist. Dies bedeutet, dass der -Tensor
 an einem festen Vektor
bzw. festen Kovektor
an einem festen Vektor
bzw. festen Kovektor  ausgewertet wird.
ausgewertet wird.
Tensorverjüngung
Gegeben sei ein (r,s)-Tensor sowie  und
und  .
Die Tensorverjüngung
.
Die Tensorverjüngung  bildet den Tensor
bildet den Tensor

auf den Tensor

ab. Dieser Vorgang heißt Tensorverjüngung oder Spurbildung. Im Fall von (1,1)-Tensoren entspricht die Tensorverjüngung

unter der Identifizierung  der Spur
eines Endomorphismus.
der Spur
eines Endomorphismus.
Mit Hilfe der einsteinschen Summenkonvention kann man die Tensorverjüngung
sehr kurz darstellen. Seien beispielsweise  die Koeffizienten (bzw. Koordinaten) des zweistufigen Tensors
bezüglich einer gewählten Basis. Will man diesen (1,1)-Tensor verjüngen, so
schreibt man oft anstatt
die Koeffizienten (bzw. Koordinaten) des zweistufigen Tensors
bezüglich einer gewählten Basis. Will man diesen (1,1)-Tensor verjüngen, so
schreibt man oft anstatt  nur die Koeffizienten
nur die Koeffizienten  .
Die einsteinsche Summenkonvention besagt nun, dass über alle gleichen Indizes
summiert wird und somit
ein Skalar ist, der mit der Spur des Endomorphismus übereinstimmt. Der Ausdruck
.
Die einsteinsche Summenkonvention besagt nun, dass über alle gleichen Indizes
summiert wird und somit
ein Skalar ist, der mit der Spur des Endomorphismus übereinstimmt. Der Ausdruck
 ist hingegen nicht definiert, weil nur über gleiche Indizes summiert wird, wenn
einer oben und einer unten steht. Hingegen ist also
ist hingegen nicht definiert, weil nur über gleiche Indizes summiert wird, wenn
einer oben und einer unten steht. Hingegen ist also  ein Tensor erster Stufe.
ein Tensor erster Stufe.
Pull-Back (Rücktransport)
Sei  eine lineare Abbildung zwischen Vektorräumen, die kein Isomorphismus zu sein
braucht. Der Rücktransport von
eine lineare Abbildung zwischen Vektorräumen, die kein Isomorphismus zu sein
braucht. Der Rücktransport von  sei eine Abbildung
sei eine Abbildung  ,
die durch
,
die durch

definiert ist. Dabei ist  und
und  .
.
Push-Forward
Sei  ein Vektorraumisomorphismus.
Definiere den Push-Forward von
durch
ein Vektorraumisomorphismus.
Definiere den Push-Forward von
durch  mit
mit

Dabei ist ,
 und
und  .
Mit
.
Mit  wird der Rücktransport
der Linearform
wird der Rücktransport
der Linearform  notiert. Konkret heißt dies
notiert. Konkret heißt dies  .
Analog zum Rücktransport kann man beim Push-Forward auf die Isomorphie von
verzichten und diese Operation nur für
.
Analog zum Rücktransport kann man beim Push-Forward auf die Isomorphie von
verzichten und diese Operation nur für  -Tensoren
definieren.
-Tensoren
definieren.
Tensoralgebra
Sei
ein Vektorraum über einem Körper
.
Dann ist durch

die sogenannte Tensoralgebra definiert. Mit der Multiplikation, die auf den
homogenen Bestandteilen durch das Tensorprodukt
gegeben ist, wird  zu einer unitären assoziativen
Algebra.
zu einer unitären assoziativen
Algebra.
Tensorproduktraum
In diesem Abschnitt werden Tensorprodukträume definiert. Diese werden typischerweise in der Algebra betrachtet. Diese Definition ist allgemeiner als die der (r,s)-Tensoren, da hier die Tensorräume aus unterschiedlichen Vektorräumen konstruiert werden können.
Die universelle Eigenschaft
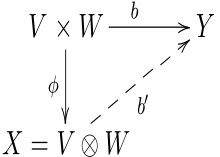
Es seien
und  Vektorräume über dem Körper .
Sind
Vektorräume über dem Körper .
Sind  weitere -Vektorräume,
weitere -Vektorräume,
 eine beliebige bilineare Abbildung und
eine beliebige bilineare Abbildung und  eine lineare Abbildung, dann ist auch die Verknüpfung
eine lineare Abbildung, dann ist auch die Verknüpfung  eine bilineare Abbildung. Ist also eine bilineare Abbildung gegeben, so kann man
daraus auch beliebig viele weitere bilineare Abbildungen konstruieren. Die
Frage, die sich ergibt, ist, ob es eine bilineare Abbildung gibt, aus der auf
diese Art, durch Verknüpfung mit linearen Abbildungen, alle bilinearen
Abbildungen auf
eine bilineare Abbildung. Ist also eine bilineare Abbildung gegeben, so kann man
daraus auch beliebig viele weitere bilineare Abbildungen konstruieren. Die
Frage, die sich ergibt, ist, ob es eine bilineare Abbildung gibt, aus der auf
diese Art, durch Verknüpfung mit linearen Abbildungen, alle bilinearen
Abbildungen auf  (auf eindeutige Weise) konstruiert werden können. Ein solches universelles
Objekt, d.h. die bilineare Abbildung samt ihrem Bildraum, wird als
Tensorprodukt von
und
bezeichnet.
(auf eindeutige Weise) konstruiert werden können. Ein solches universelles
Objekt, d.h. die bilineare Abbildung samt ihrem Bildraum, wird als
Tensorprodukt von
und
bezeichnet.
Definition: Als Tensorprodukt der Vektorräume
und ,
wird jeder -Vektorraum
 bezeichnet, zu dem es eine bilineare
Abbildung
bezeichnet, zu dem es eine bilineare
Abbildung  gibt, die die folgende universelle
Eigenschaft erfüllt:
gibt, die die folgende universelle
Eigenschaft erfüllt:
- Zu jeder bilinearen Abbildung
 von
in einen Vektorraum
von
in einen Vektorraum  existiert genau eine lineare Abbildung
existiert genau eine lineare Abbildung  ,
sodass für alle
,
sodass für alle  gilt
gilt

Gibt es einen solchen Vektorraum ,
so ist er bis auf Isomorphie
eindeutig. Man schreibt  und
und  .
Die universelle Eigenschaft kann also als
.
Die universelle Eigenschaft kann also als  geschrieben werden. Zur Konstruktion solcher Produkträume sei auf den Artikel Tensorprodukt verwiesen.
geschrieben werden. Zur Konstruktion solcher Produkträume sei auf den Artikel Tensorprodukt verwiesen.
Tensor als Element des Tensorproduktes
In der Mathematik sind Tensoren Elemente von Tensorprodukten.
Es sei
ein Körper
und es seien  Vektorräume über dem Körper
.
Vektorräume über dem Körper
.
Das Tensorprodukt  von
von  ist ein -Vektorraum,
dessen Elemente Summen von Symbolen der Form
ist ein -Vektorraum,
dessen Elemente Summen von Symbolen der Form

sind. Dabei gelten für diese Symbole die folgenden Rechenregeln:


Die Tensoren der Form  heißen elementar. Jeder Tensor lässt sich als Summe von elementaren
Tensoren schreiben, aber diese Darstellung ist außer in trivialen Fällen nicht
eindeutig, wie man an der ersten der beiden Rechenregeln sieht.
heißen elementar. Jeder Tensor lässt sich als Summe von elementaren
Tensoren schreiben, aber diese Darstellung ist außer in trivialen Fällen nicht
eindeutig, wie man an der ersten der beiden Rechenregeln sieht.
Ist  eine Basis
von
eine Basis
von  (für
(für  ;
;
 ),
so ist
),
so ist

eine Basis von  Die Dimension von
ist also das Produkt der Dimensionen der einzelnen Vektorräume
Die Dimension von
ist also das Produkt der Dimensionen der einzelnen Vektorräume 
Tensorprodukte und Multilinearformen
Der Dualraum von
kann mit dem Raum der -Multilinearformen

identifiziert werden:
- Ist
 eine Linearform auf
eine Linearform auf  so ist die entsprechende Multilinearform
so ist die entsprechende Multilinearform

- Ist
 eine -Multilinearform,
so ist die entsprechende Linearform auf
definiert durch
eine -Multilinearform,
so ist die entsprechende Linearform auf
definiert durch

Sind alle betrachteten Vektorräume endlichdimensional, so kann man

miteinander identifizieren, d.h., Elemente von  entsprechen -Multilinearformen
auf
entsprechen -Multilinearformen
auf 
Invarianten von Tensoren 1. und 2. Stufe
Als Invarianten eines ein- oder zweistufigen Tensors bezeichnet man Skalare, die sich unter orthogonalen Koordinatentransformationen des Tensors nicht ändern. Für Tensoren erster Stufe führt die Bildung der vom Skalarprodukt induzierten Norm zu einer Invarianten
 ,
,
wobei hier und im Folgenden wieder die einsteinsche Summenkonvention verwendet wird. Für Tensoren zweiter Stufe im dreidimensionalen euklidischen Raum lassen sich im Allgemeinen sechs irreduzible Invarianten (das heißt Invarianten, die nicht durch andere Invarianten ausgedrückt werden können) finden:

Im Falle von symmetrischen Tensoren 2. Stufe (z.B. dem Verzerrungstensor)
fallen die Invarianten  und
und  zusammen. Außerdem lässt sich
zusammen. Außerdem lässt sich  über die anderen 3 Invarianten darstellen (ist also nicht mehr
irreduzibel). Die Determinante
ist auch eine Invariante, sie lässt sich beispielsweise für
über die anderen 3 Invarianten darstellen (ist also nicht mehr
irreduzibel). Die Determinante
ist auch eine Invariante, sie lässt sich beispielsweise für  -Matrizen
über die irreduziblen Invarianten
-Matrizen
über die irreduziblen Invarianten  ,
,
 und
und  darstellen als
darstellen als

Für antisymmetrische Tensoren gilt  ,
,
 ,
,
 und
lässt sich wieder auf
zurückführen.
Somit haben im dreidimensionalen euklidischen Raum symmetrische Tensoren
2. Stufe drei irreduzible Invarianten und antisymmetrische Tensoren
2. Stufe eine irreduzible Invariante.
und
lässt sich wieder auf
zurückführen.
Somit haben im dreidimensionalen euklidischen Raum symmetrische Tensoren
2. Stufe drei irreduzible Invarianten und antisymmetrische Tensoren
2. Stufe eine irreduzible Invariante.
Tensorprodukte eines Vektorraums und Symmetrie
Man kann das Tensorprodukt  eines Vektorraumes
mit sich selbst bilden. Ohne weiteres Wissen über den Vektorraum kann ein Automorphismus des
Tensorprodukts definiert werden, der darin besteht, in den reinen Produkten
eines Vektorraumes
mit sich selbst bilden. Ohne weiteres Wissen über den Vektorraum kann ein Automorphismus des
Tensorprodukts definiert werden, der darin besteht, in den reinen Produkten
 die Faktoren zu vertauschen:
die Faktoren zu vertauschen:

Da das Quadrat dieser Abbildung die Identität ist, folgt, dass für die
Eigenwerte nur die Werte  in Frage kommen.
in Frage kommen.
- Ein
 ,
das
,
das  erfüllt, heißt symmetrisch. Beispiele sind die Elemente
erfüllt, heißt symmetrisch. Beispiele sind die Elemente
-
 .
.- Die Menge aller symmetrischen Tensoren der Stufe 2 wird mit
 bezeichnet.
bezeichnet.
- Ein ,
das
 erfüllt, heißt antisymmetrisch oder alternierend. Beispiele sind
die Elemente
erfüllt, heißt antisymmetrisch oder alternierend. Beispiele sind
die Elemente
-
 .
.- Die Menge aller antisymmetrischen Tensoren der Stufe 2 wird mit
 bezeichnet.
bezeichnet.
Mittels  können Tensorpotenzen von
beliebiger Stufe gebildet werden. Entsprechend können weitere paarweise
Vertauschungen definiert werden. Nur sind diese nicht mehr voneinander
unabhängig. So lässt sich jede Vertauschung der Stellen
können Tensorpotenzen von
beliebiger Stufe gebildet werden. Entsprechend können weitere paarweise
Vertauschungen definiert werden. Nur sind diese nicht mehr voneinander
unabhängig. So lässt sich jede Vertauschung der Stellen  und
und  auf Vertauschungen mit der ersten Stelle zurückführen:
auf Vertauschungen mit der ersten Stelle zurückführen:

Injektives und projektives Tensorprodukt
Falls die Vektorräume, die man miteinander tensorieren will, eine Topologie besitzen, so ist es wünschenswert, dass ihr Tensorprodukt ebenfalls eine Topologie besitzt. Es gibt natürlich viele Möglichkeiten, eine solche Topologie zu definieren. Das injektive beziehungsweise das projektive Tensorprodukt sind dafür jedoch eine natürliche Wahl.
Tensoranalysis
Ursprünglich wurde der Tensorkalkül nicht in dem modernen hier vorgestellten algebraischen Konzept untersucht. Der Tensorkalkül entstand aus Überlegungen zur Differentialgeometrie. Insbesondere Gregorio Ricci-Curbastro und sein Schüler Tullio Levi-Civita haben ihn entwickelt. Man nennt den Tensorkalkül daher auch Ricci-Kalkül. Albert Einstein griff diesen Kalkül in seiner Relativitätstheorie auf, was ihm große Bekanntheit in der Fachwelt einbrachte. Die damaligen Tensoren werden heute als Tensorfelder bezeichnet und spielen in der Differentialgeometrie auch heute noch eine wichtige Rolle. Im Gegensatz zu Tensoren sind Tensorfelder differenzierbare Abbildungen, die jedem Punkt des zugrundeliegenden (oft gekrümmten) Raums einen Tensor zuordnen.
Literatur
- Theodor Bröcker: Lineare Algebra und Analytische Geometrie. Birkhäuser, Basel 2004, ISBN 3-7643-2178-4, Kap. VII: Tensorrechnung.
- Horst Teichmann: Physikalische Anwendungen der Vektor- und Tensorrechnung (= BI-Hochschultaschenbücher. 39). 3. Auflage. Bibliographisches Institut, Mannheim u.a. 1973, ISBN 3-411-00039-2.
- André Lichnerowicz: Einführung in die Tensoranalysis (= BI Hochschultaschenbuch. 77). Bibliographisches Institut, Mannheim u.a. 1966.
- Horst Lippmann: Angewandte Tensorrechnung. Springer 1993.
- Mikhail Itskov: Tensor algebra and tensor analysis for engineers. 3. Auflage. Springer, Heidelberg u.a. 2013, ISBN 978-3-642-30878-9.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 06.08. 2024