Verzerrungstensor
Verzerrungstensoren sind dimensionslose Tensoren zweiter Stufe, die das Verhältnis von Momentankonfiguration zur Ausgangskonfiguration bei der Deformation von kontinuierlichen Körpern und damit Veränderung der gegenseitigen Lagebeziehungen der Materieelemente beschreiben. Diese Änderung (Deformation) der inneren Anordnung korrespondiert mit einer Änderung der äußeren Gestalt des Festkörpers und wird damit beispielsweise als Dehnung, Stauchung, Scherung usw. sichtbar. Die Verzerrungstensoren sind eine wesentliche Größe in der Beschreibung der Kinematik der Deformation. In der Kontinuumsmechanik werden eine Reihe von verschiedenen Verzerrungstensoren definiert, deren Benennung nicht einheitlich ist.
Die Verzerrungstensoren werden vor allem für die Formulierung von Materialmodellen, z.B. der Hyperelastizität, verwendet, die eine Relation zwischen den Spannungen im Material und seinen Deformationen herstellen. Solche Materialmodelle werden dazu benutzt, Verformungen von Körpern zu berechnen.
Einleitung
In der Literatur ist eine Vielzahl von Verzerrungstensoren bekannt, die aus dem Deformationsgradienten gebildet werden. Für deren Definition werden die Verschiebungen

als Differenzvektor zwischen der momentanen Lage  eines Partikels und seiner Ausgangslage
eines Partikels und seiner Ausgangslage  eingeführt, mit
eingeführt, mit  als den materiellen Koordinaten des Partikels bezüglich der Standardbasis. Der Verschiebungsgradient[1]
als den materiellen Koordinaten des Partikels bezüglich der Standardbasis. Der Verschiebungsgradient[1]

ist dann die Ableitung des Verschiebungsvektors  nach den materiellen Koordinaten
nach den materiellen Koordinaten  und enthält die Ableitungen der Verschiebungen ui nach den
Koordinaten Xj. Damit bekommt der Deformationsgradient die
Form
und enthält die Ableitungen der Verschiebungen ui nach den
Koordinaten Xj. Damit bekommt der Deformationsgradient die
Form

worin 1 der Einheitstensor ist. Zunächst lassen sich damit der rechte Cauchy-Green-Tensor

bzgl. der Ausgangskonfiguration und der linke Cauchy-Green-Tensor

bzgl. der Momentankonfiguration bilden. Diese beiden Strecktensoren sind symmetrisch und im Fall einer Nicht-Deformation gleich dem Einheitstensor.
Für ingenieurtechnische Anwendungen werden gewöhnlich allerdings Größen gewünscht, die bei Nicht-Deformation eine Null darstellen. Dies führt auf Definitionen des Green-Lagrange-Verzerrungstensors

oder des Euler-Almansi-Verzerrungstensors

Daneben existiert aber noch eine Vielzahl weiterer ähnlicher Definitionen, die jeweils ihre Berechtigung und Vorteile in verschiedenen Theorien besitzen, siehe unten. Dort erklärt sich auch der oben auftretende Faktor ½.
Linearisierter Verzerrungstensor
Zur Beschreibung kleiner
Verzerrungen wird in der technischen
Mechanik üblicherweise der linearisierte Verzerrungstensor  verwendet. Dieser Verzerrungstensor wird auch Ingenieursdehnung genannt,
denn bei vielen Anwendungen im technischen Bereich liegen kleine Dehnungen vor
oder sie müssen aus sicherheitstechnischen Gründen klein gehalten werden. Der
linearisierte Verzerrungstensor entsteht durch Linearisierung der Größen
verwendet. Dieser Verzerrungstensor wird auch Ingenieursdehnung genannt,
denn bei vielen Anwendungen im technischen Bereich liegen kleine Dehnungen vor
oder sie müssen aus sicherheitstechnischen Gründen klein gehalten werden. Der
linearisierte Verzerrungstensor entsteht durch Linearisierung der Größen  oder
oder  Hierzu wird die Definition des Deformationsgradienten in den Verzerrungstensor
eingesetzt:
Hierzu wird die Definition des Deformationsgradienten in den Verzerrungstensor
eingesetzt:
![{\displaystyle \mathbf {E} ={\frac {1}{2}}{\Bigl [}\mathbf {F^{\top }\cdot F} -\mathbf {1} {\Bigr ]}={\frac {1}{2}}{\Bigl [}{\Bigl (}\mathbf {H+1} {\Bigr )}^{\top }\cdot {\Bigl (}\mathbf {H} +\mathbf {1} {\Bigr )}-\mathbf {1} {\Bigr ]}={\frac {1}{2}}{\Bigl [}\mathbf {H+H^{\top }} +\mathbf {H^{\top }\cdot H} {\Bigr ]}\,.}](/svg/172c0700b8f6b6d1a3112f41224cca27de48d35b.svg)
Bei kleinen Verzerrungen kann der letzte Term vernachlässigt werden und so entsteht der linearisierte Verzerrungstensor
![{\displaystyle {\boldsymbol {\varepsilon }}:={\frac {1}{2}}{\Bigl [}\mathbf {H+H^{\top }} {\Bigr ]}={\begin{pmatrix}\varepsilon _{xx}&\varepsilon _{xy}&\varepsilon _{xz}\\\varepsilon _{yx}&\varepsilon _{yy}&\varepsilon _{yz}\\\varepsilon _{zx}&\varepsilon _{zy}&\varepsilon _{zz}\end{pmatrix}},}](/svg/9f3b88b1a99c0c867f20ce565155d3ac2116ba8c.svg)
mit den Komponenten

Allgemeine Definition
Ein Tensor E ist ein geeignetes Verzerrungsmaß, wenn er drei Forderungen genügt:
- E verschwindet bei Starrkörperbewegungen (Verschiebung und/oder Drehung ohne Formänderung)
- E ist eine monotone, stetige und stetig differenzierbare Funktion des Verschiebungsgradienten H und
- E geht bei kleinen Verzerrungen in den linearisierten Verzerrungstensor ε über.
Die Polarzerlegung des Deformationsgradienten F = R · U = v · R spaltet die Verformung lokal in eine reine Drehung, vermittelt durch den orthogonalen Rotationstensor R (mit R · RT und der Determinante det(R) = 1), und eine reine Streckung, vermittelt durch die symmetrischen positiv definiten rechten bzw. linken Strecktensoren U bzw. v. Letztere dienen der Definition einer Vielzahl von Verzerrungstensoren.
In seiner natürlichen Darstellung in konvektiven Koordinaten ist der rechte Strecktensor U kovariant und der linke Strecktensor v kontravariant. Diese Eigenschaft überträgt sich auf die mit ihnen gebildeten Verzerrungstensoren. Durch Invertierung werden kovariante Tensoren kontravariant und umgekehrt.
Seth-Hill-Familie von Verzerrungstensoren
Die Verzerrungstensoren

und

die sich für verschiedene Werte des Parameters  ergeben, genügen den Bedingungen der allgemeinen Definition.
Die einigen gebräuchlichen Werten von
entsprechenden Tensoren führt die folgende Tabelle auf:
ergeben, genügen den Bedingungen der allgemeinen Definition.
Die einigen gebräuchlichen Werten von
entsprechenden Tensoren führt die folgende Tabelle auf:
| m | Verzerrungstensor |  |
Namen |
|---|---|---|---|
| 1 | 
|

|
Green-Lagrange-Verzerrungstensor, Green- oder St.-Venant-Dehnungen |
| ½ | 
|
|
Biot-Verzerrungstensor, Materieller Biot-, Cauchy- oder Swainger-Verzerrungstensor |
| 0 | 
|
|
Hencky-Dehnungen, materielle logarithmische Dehnungen |
| −1 | 
|

|
negativer Piola-Verzerrungstensor, Lagrange-Karni-Reiner-Verzerrungstensor |
Die hier benutzten Namen stehen jeweils kursiv hervorgehoben an erster Stelle. In der räumlichen Beschreibung ergeben sich die Entsprechungen:
| m | Verzerrungstensor | |
Namen |
|---|---|---|---|
| 1 | 
|
|
negativer Finger-Tensor, Euler-Karni-Reiner-Verzerrungstensor |
| 0 | 
|
|
Räumliche Hencky-Dehnungen, räumliche logarithmische Dehnungen |
| -½ | 
|
|
Swainger-Verzerrungstensor, räumlicher Biot-Verzerrungstensor |
| −1 | 
|
|
Euler-Almansi-Verzerrungstensor, Almansis- oder Hamels-Verzerrungstensor |
In den Tabellen bedeutet ""
Kovarianz und ""
Kontravarianz. Der Funktionswert eines Tensors (z.B.  )
berechnet sich durch Hauptachsentransformation,
Bildung der Funktionswerte der Diagonalelemente und Rücktransformation.
)
berechnet sich durch Hauptachsentransformation,
Bildung der Funktionswerte der Diagonalelemente und Rücktransformation.
Beschreibung einiger Verzerrungstensoren
Weil die Verzerrungstensoren der Seth-Hill-Familie bei kleinen Verzerrungen in den linearisierten Verzerrungstensor übergehen, trifft das hier gesagte bei kleinen Verzerrungen auch auf den linearisierten Verzerrungstensor zu.
Der Green-Lagrange-Verzerrungstensor
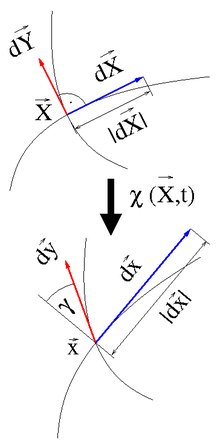
Der Green-Lagrange-Verzerrungstensor ist aus dem Vergleich zweier materieller
Linienelemente  und
und  im Punkt
motiviert, siehe Abbildung rechts:
im Punkt
motiviert, siehe Abbildung rechts:

In einer Richtung  ergibt sich über
ergibt sich über

die Dehnung:

Wenn in der Ausgangskonfiguration  ist, berechnet sich:
ist, berechnet sich:

Mit  resultiert für die Scherung
γ dann:
resultiert für die Scherung
γ dann:

Der Euler-Almansi-Verzerrungstensor
Der Euler-Almansi-Verzerrungstensor

kann analog zum Green-Lagrange-Verzerrungstensor aus dem Vergleich zweier
materieller Linienelemente  und
und  im Punkt
im Punkt  motiviert werden:
motiviert werden:

Für die Dehnung  in eine Richtung
in eine Richtung  ergibt sich dann:
ergibt sich dann:
 mit
mit 
Der Hencky-Verzerrungstensor
Der Hencky-Verzerrungstensor wird über die Hauptachsentransformation des
rechten Strecktensors  berechnet. Weil dieser symmetrisch und positiv definit ist, lautet seine
spektrale Zerlegung
berechnet. Weil dieser symmetrisch und positiv definit ist, lautet seine
spektrale Zerlegung

wobei λi die sämtlich positiven Eigenwerte
und  die auf eins normierten und paarweise orthogonalen Eigenvektoren von
sind. Dann berechnet sich der Hencky-Verzerrungstensor aus
die auf eins normierten und paarweise orthogonalen Eigenvektoren von
sind. Dann berechnet sich der Hencky-Verzerrungstensor aus

Seine Spur ist wegen

ein Maß für die Kompression am Ort. Bei kleinen Verzerrungen ist

weswegen dann die Spur des Verschiebungsgradienten oder des linearisierten Verzerrungstensors diese Rolle übernimmt.
Der Piola- und Finger-Verzerrungstensor
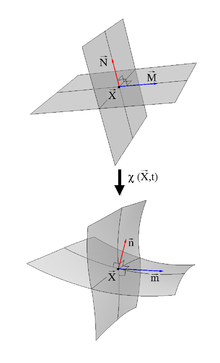
Der Piola-Verzerrungstensor  ist aus dem Vergleich der Normalenvektoren
ist aus dem Vergleich der Normalenvektoren
 an materielle Flächen motiviert. Eine Familie von Flächen kann
durch eine skalare Funktion
an materielle Flächen motiviert. Eine Familie von Flächen kann
durch eine skalare Funktion

und einen Flächenparameter  definiert werden. Die Normalenvektoren an diese Flächen sind die Gradienten
definiert werden. Die Normalenvektoren an diese Flächen sind die Gradienten

Im Zuge einer Deformation wird daraus

Mit einer anderen skalaren Funktion  kann eine andere Familie von Flächen definiert werden, deren Normalenvektoren
kann eine andere Familie von Flächen definiert werden, deren Normalenvektoren
 bzw.
bzw.  über
über

in Beziehung stehen. Der Vergleich der Skalarprodukte der Normalenvektoren in
der deformierten und undeformierten Lage in einem materiellen Punkt
führt auf den Piola-Verzerrungstensor

der also ein Maß für die Deformationen der materiellen Flächen ist. Der Piola-Verzerrungstensor operiert in der Ausgangskonfiguration.
Sein Gegenstück in der Momentankonfiguration ist der Finger-Tensor

für den

abgeleitet werden kann.
Verzerrungsgeschwindigkeiten
Alle realen Materialien sind mehr oder weniger ratenabhängig, das heißt ihr Widerstand gegen eine Deformation hängt davon ab, mit welcher Geschwindigkeit diese Deformation herbeigeführt wird. Für die Beschreibung eines solchen Zusammenhangs werden Verzerrungsgeschwindigkeiten benutzt. Das Materialverhalten ist beobachterinvariant, die meisten Zeitableitungen der Verzerrungen jedoch nicht. Es wurden aber eine Reihe von Verzerrungsgeschwindigkeiten definiert, die beobachterinvariant sind.
Der rechte Strecktensor
ist körperbezogen objektiv, was bedeutet, dass er von einem Wechsel des
Bezugssystems unbeeinflusst ist. Gleiches gilt auch für seine materielle
Zeitableitung  Dementsprechend sind auch alle aus dieser Zeitableitung gebildeten
Verzerrungsgeschwindigkeiten, z.B.
Dementsprechend sind auch alle aus dieser Zeitableitung gebildeten
Verzerrungsgeschwindigkeiten, z.B.

körperbezogen objektiv.
In der räumlichen Beschreibung kann nachgewiesen werden, dass der linke
Strecktensor  objektiv ist, seine Rate
objektiv ist, seine Rate  jedoch nicht. Für die Formulierung objektiver Raten der räumlichen
Verzerrungstensoren wird der räumliche Geschwindigkeitsgradient
jedoch nicht. Für die Formulierung objektiver Raten der räumlichen
Verzerrungstensoren wird der räumliche Geschwindigkeitsgradient

definiert, dessen symmetrischer Anteil

räumlicher Verzerrungsgeschwindigkeitstensor und dessen unsymmetrischer Anteil

Spin- oder Wirbeltensor heißt. Dann lautet die (objektive)
kovariante Oldroyd-Ableitung eines Tensors  :
:

Für den Euler-Almansi-Tensor e gilt insbesondere

Die kontravariante Oldroyd-Ableitung eines Tensors
ist definiert als:

Die Raten der kovarianten Tensoren werden üblicherweise mit der kovarianten
Oldroyd-Ableitung gebildet und die der kontravarianten Tensoren mit der
kontravarianten Oldroyd-Ableitung. Die Zaremba-Jaumann-Rate eines Tensors
ist ebenfalls objektiv und definiert als:

Siehe auch
Literatur
- H. Altenbach: Kontinuumsmechanik. Springer, 2012, ISBN 978-3-642-24118-5.
Anmerkungen
- ↑
Die Fréchet-Ableitung
einer Funktion
 nach
nach  ist der beschränkte lineare Operator
ist der beschränkte lineare Operator  der – sofern er existiert – in alle Richtungen
der – sofern er existiert – in alle Richtungen  dem Gâteaux-Differential
entspricht, also
dem Gâteaux-Differential
entspricht, also
 skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch
skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch




© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.05. 2025