Orthogonaler Tensor
 durch einen Tensor
durch einen Tensor  .
. um die Drehachse
um die Drehachse  mit Winkel
mit Winkel  durch einen orthogonalen Tensor
durch einen orthogonalen Tensor  .
.Orthogonale Tensoren sind einheitenfreie Tensoren zweiter Stufe, die eine Drehung oder Drehspiegelung im euklidischen Vektorraum ausführen. In der Kontinuumsmechanik, die physikalische Prozesse beschreibt, werden nur Drehungen betrachtet, denn Drehspiegelungen kommen in der Natur nicht vor.
Tensoren zweiter Stufe werden hier als lineare
Abbildungen von geometrischen Vektoren auf geometrische Vektoren benutzt,
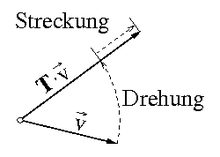
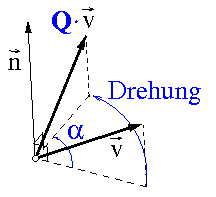
die im Allgemeinen dabei gedreht und gestreckt werden, siehe Abbildung rechts
oben. Bei einem orthogonalen Tensor, der eine Drehung oder Drehspiegelung
repräsentiert, entfällt die Streckung, so dass der Betrag des Vektors bei der
Transformation nicht verändert wird, siehe die untere Abbildung rechts.
Orthogonale Tensoren werden üblicher Weise mit den Formelzeichen
oder  bezeichnet, wobei
zumeist für den Rotationstensor in der Polarzerlegung des Deformationsgradienten
steht.
bezeichnet, wobei
zumeist für den Rotationstensor in der Polarzerlegung des Deformationsgradienten
steht.
Bezüglich der Standardbasis können orthogonale Tensoren wie orthogonale Matrizen geschrieben werden und haben auch analoge Eigenschaften. Anders als Matrizen referenzieren die Koeffizienten eines Tensors jedoch auf ein Basissystem des zugrunde liegenden Vektorraums, so dass sich die Koeffizienten des Tensors bei einem Wechsel des Basissystems auf charakteristische Weise ändern. Jeder Tensor besitzt Invarianten, die bei einem Wechsel des Basissystems unverändert bleiben. Bei einem orthogonalen Tensor geben diese Invarianten über den Drehwinkel, die Drehachse und darüber, ob der Tensor eine Drehung oder Drehspiegelung repräsentiert, Auskunft.
Orthogonale Tensoren treten in der euklidischen Transformation auf, mit der die Beziehung zwischen beliebig bewegten Bezugssystemen und in ihnen vorliegenden physikalischen Größen beschrieben wird. In der Materialtheorie helfen orthogonale Tensoren dabei, bezugssysteminvariante Materialgleichungen aufzustellen. Außerdem wird die Richtungsabhängigkeit eines Materials (Transversale Isotropie, Orthotropie) mit orthogonalen Tensoren beschrieben.
Definition
Orthogonale Tensoren sind Tensoren zweiter Stufe ,
für die gilt:

Die hochgestellte  kennzeichnet den inversen,
kennzeichnet den inversen,
 den transponierten
Tensor und
den transponierten
Tensor und  den Einheitstensor.
Wegen
den Einheitstensor.
Wegen

ist

Ein orthogonaler Tensor, der eine reine Drehung repräsentiert, wird
eigentlich orthogonal genannt und hat die Determinante
+1. Bei  führt der Tensor einer Drehspiegelung aus. Weil Spiegelungen in der Natur nicht
vorkommen, ist in einem physikalischen Kontext stets
führt der Tensor einer Drehspiegelung aus. Weil Spiegelungen in der Natur nicht
vorkommen, ist in einem physikalischen Kontext stets  .
.
Starrkörperbewegungen
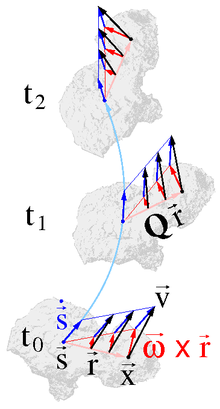
Jede Starrkörperbewegung
lässt sich in eine Translation und eine Rotation zerlegen. Als Drehzentrum
eignet sich jeder ruhende oder bewegte Punkt und auch der Schwerpunkt des
Körpers, siehe Abbildung rechts. Sei  der zeitlich fixierte Differenzvektor zwischen einem Partikel
der zeitlich fixierte Differenzvektor zwischen einem Partikel  des starren Körpers und seinem Schwerpunkt
des starren Körpers und seinem Schwerpunkt  zu einem Zeitpunkt
zu einem Zeitpunkt  .
Die Translation des Körpers kann dann mit seiner Schwerpunktsbewegung
.
Die Translation des Körpers kann dann mit seiner Schwerpunktsbewegung  (mit
(mit  )
und seine Drehung mit einem von der Zeit aber nicht vom Ort abhängigen
orthogonalen Tensor
)
und seine Drehung mit einem von der Zeit aber nicht vom Ort abhängigen
orthogonalen Tensor  (mit
(mit  )
dargestellt werden. Translation und Rotation zusammengenommen definieren die
Bewegungsfunktion
)
dargestellt werden. Translation und Rotation zusammengenommen definieren die
Bewegungsfunktion  des Partikels :
des Partikels :

Die Geschwindigkeit des Partikels ist dann

Der Vektor  ist hier der Ort des Partikels zur Zeit t und
ist hier der Ort des Partikels zur Zeit t und  ist seine Geschwindigkeit zur Zeit t. Beim Übergang von der oberen zur unteren
Gleichung vollzieht sich der Wechsel von der
lagrangeschen zur
eulerschen Betrachtungsweise der Bewegung. Der Tensor
ist seine Geschwindigkeit zur Zeit t. Beim Übergang von der oberen zur unteren
Gleichung vollzieht sich der Wechsel von der
lagrangeschen zur
eulerschen Betrachtungsweise der Bewegung. Der Tensor  ist schiefsymmetrisch:
ist schiefsymmetrisch:

und besitzt daher einen dualen
Vektor  mit der Eigenschaft:
mit der Eigenschaft:

Einsetzen des dualen Vektors in das Geschwindigkeitsfeld führt auf die eulersche Geschwindigkeitsgleichung

die keinen sichtbaren Tensor enthält. Nur im Kreuzprodukt, das einer Tensortransformation entspricht, verbirgt sich noch ein Hinweis auf einen Tensor.
Transformationseigenschaften
Vektortransformation
Ein orthogonaler Tensor dreht Vektoren, denn das Skalarprodukt zweier
beliebiger Vektoren bleibt unter der linearen Abbildung mit
erhalten:

Insbesondere ist mit  :
:

weswegen ein orthogonaler Tensor
die Frobeniusnorm eines
Vektors nicht verändert. Weil die Drehachse
bei einer reinen Drehung auf sich selbst abgebildet wird, ist die Drehachse der
Drehung ein Eigenvektor eines eigentlich orthogonalen Tensors
mit Eigenwert eins:

Ist
ein uneigentlich orthogonaler Tensor, dann ist

Spatprodukt und Kreuzprodukt
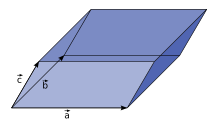
Das Spatprodukt dreier Vektoren
ist das Volumen des von den Vektoren aufgespannten Spats, siehe Bild. Werden die
drei Vektoren wie im Bild mit  bezeichnet und mit einem orthogonalen Tensor transformiert, berechnet sich das
Spatprodukt zu:
bezeichnet und mit einem orthogonalen Tensor transformiert, berechnet sich das
Spatprodukt zu:
![{\begin{array}{rcl}({\mathbf {Q}}\cdot {\vec {a}})\cdot [({\mathbf {Q}}\cdot {\vec {b}})\times ({\mathbf {Q}}\cdot {\vec {c}})]&=&\operatorname {det}{\begin{pmatrix}{\mathbf {Q}}\cdot {\vec {a}}&{\mathbf {Q}}\cdot {\vec {b}}&{\mathbf {Q}}\cdot {\vec {c}}\end{pmatrix}}=\operatorname {det}\left[{\mathbf {Q}}\cdot {\begin{pmatrix}{\vec {a}}&{\vec {b}}&{\vec {c}}\end{pmatrix}}\right]\\&=&\operatorname {det}({\mathbf {Q}})\operatorname {det}{\begin{pmatrix}{\vec {a}}&{\vec {b}}&{\vec {c}}\end{pmatrix}}=\operatorname {det}({\mathbf {Q}})\,{\vec {a}}\cdot ({\vec {b}}\times {\vec {c}})\,.\end{array}}](/svg/35c28713de4ba6b6da5005391f1024398f2e06b5.svg)
Wenn der Tensor eigentlich orthogonal ist, dann wird das Spatprodukt also durch ihn nicht verändert, andernfalls kehrt das Spatprodukt sein Vorzeichen um. Weiter folgt:
![{\begin{array}{l}({\mathbf {Q}}\cdot {\vec {a}})\cdot [({\mathbf {Q}}\cdot {\vec {b}})\times ({\mathbf {Q}}\cdot {\vec {c}})]={\vec {a}}\cdot {\mathbf {Q}}^{\top }\cdot [({\mathbf {Q}}\cdot {\vec {b}})\times ({\mathbf {Q}}\cdot {\vec {c}})]=\operatorname {det}({\mathbf {Q}})\,{\vec {a}}\cdot ({\vec {b}}\times {\vec {c}})\\\rightarrow {\vec {a}}\cdot \left\{{\mathbf {Q}}^{\top }\cdot [({\mathbf {Q}}\cdot {\vec {b}})\times ({\mathbf {Q}}\cdot {\vec {c}})]-\operatorname {det}({\mathbf {Q}})({\vec {b}}\times {\vec {c}})\right\}=0\end{array}}](/svg/4920879c440baada253c694c15876ab0df668f0c.svg)
Das gilt für jeden Vektor  ,
weshalb der Vektor in den geschweiften Klammern verschwindet und auf
,
weshalb der Vektor in den geschweiften Klammern verschwindet und auf

geschlossen werden kann. Deshalb kann ein eigentlich orthogonaler Tensor aus dem Kreuzprodukt herausgezogen werden während bei einem uneigentlich orthogonalen Tensor noch ein Vorzeichenwechsel stattfindet.
Mit dem Spatprodukt berechnet sich das Volumenelement und mit
dem Kreuzprodukt berechnet sich das Oberflächenelement.
Bei einer Drehspiegelung wechseln beide Elemente ihr Vorzeichen, weshalb sie nur
bei einer Transformation mit einem eigentlich orthogonalen Tensor
invariant gegenüber einer euklidischen
Transformation sind.
Tensortransformation
Sei
ein beliebiger Tensor zweiter Stufe, der einen Eigenwert  und zugehörigen Eigenvektor
besitzt, also
und zugehörigen Eigenvektor
besitzt, also

gilt, und
sei ein orthogonaler Tensor. Dann ist

Also hat der Tensor  dieselben Eigenwerte wie
aber die mit
gedrehten Eigenvektoren. Daraus folgt unmittelbar, dass die Hauptinvarianten und
Beträge von
dieselben Eigenwerte wie
aber die mit
gedrehten Eigenvektoren. Daraus folgt unmittelbar, dass die Hauptinvarianten und
Beträge von  und
übereinstimmen.
und
übereinstimmen.
Berechnung von orthogonalen Tensoren
Bei der Berechnung von orthogonalen Tensoren können sich die drei Aufgaben stellen:
- Wie wird aus der Drehachse und dem Drehwinkel der entsprechende orthogonale Tensor konstruiert?
- Welcher orthogonale Tensor transformiert zwei gegebene, gegeneinander verdrehte Vektorraumbasen ineinander?
- Wie lautet die Drehachse und der Drehwinkel eines gegebenen orthogonalen Tensors?
Diese Fragen werden in den folgenden Abschnitten beantwortet.
Drehachse und Winkel gegeben
Sei  ein Einheitsvektor (der Länge eins) und
ein Winkel. Dann ist der Tensor
ein Einheitsvektor (der Länge eins) und
ein Winkel. Dann ist der Tensor

eigentlich orthogonal und dreht um die Achse
mit Drehwinkel .
Das Kreuzprodukt von
mit dem Einheitstensor ergibt den schiefsymmetrischen axialen Tensor von
:

wenn  die Komponenten von
bezüglich der Standardbasis
die Komponenten von
bezüglich der Standardbasis
 sind.
sind.
Bei einer Drehspiegelung wäre

Der Tensor
hat jedenfalls die Spur
und den schiefsymmetrischen Anteil
![{\begin{array}{rcl}\operatorname {Sp}({\mathbf {Q}})&=&\operatorname {Sp}[\operatorname {det}({\mathbf {Q}}){\hat {n}}\otimes {\hat {n}}+\cos(\alpha )({\mathbf {I}}-{\hat {n}}\otimes {\hat {n}})+\sin(\alpha ){\hat {n}}\times {\mathbf {I}}]\\&=&\operatorname {det}({\mathbf {Q}})+2\cos(\alpha )\\{\frac {1}{2}}({\mathbf {Q}}-{\mathbf {Q}}^{\top })&=&\sin(\alpha ){\hat {n}}\times {\mathbf {I}}=\sin(\alpha ){\begin{pmatrix}0&-n_{3}&n_{2}\\n_{3}&0&-n_{1}\\-n_{2}&n_{1}&0\end{pmatrix}}\,.\end{array}}](/svg/40857e817172cc92659b59353a03940ee9543c78.svg)
Die eingangs angegebene Formel für
kann auch mit einem Rotationsvektor  geschrieben werden:
geschrieben werden:

Das Exponential
der schiefsymmetrischen Matrix  wird bei Drehmatrizen definiert und
verwendet.
wird bei Drehmatrizen definiert und
verwendet.
Es können auch Rotationsvektoren mit anderer Länge benutzt werden:
![{\begin{array}{lcl}{\vec {\alpha }}=\tan \left({\dfrac {\alpha }{2}}\right)\;{\hat {n}}&\rightarrow &{\mathbf {Q}}={\mathbf {I}}+{\dfrac {2}{1+{\vec {\alpha }}\cdot {\vec {\alpha }}}}({\vec {\alpha }}\times {\mathbf {I}}+{\vec {\alpha }}\otimes {\vec {\alpha }}-({\vec {\alpha }}\cdot {\vec {\alpha }}){\mathbf {I}})\\[2ex]{\vec {\alpha }}=\sin(\alpha )\;{\hat {n}}&\rightarrow &{\mathbf {Q}}={\mathbf {I}}+{\vec {\alpha }}\times {\mathbf {I}}+{\dfrac {1}{1+\cos(\alpha )}}({\vec {\alpha }}\otimes {\vec {\alpha }}-({\vec {\alpha }}\cdot {\vec {\alpha }}){\mathbf {I}})\\[2ex]{\vec {\alpha }}=\sin \left({\dfrac {\alpha }{2}}\right)\;{\hat {n}}&\rightarrow &{\mathbf {Q}}={\mathbf {I}}+2\cos \left({\dfrac {\alpha }{2}}\right){\vec {\alpha }}\times {\mathbf {I}}+2({\vec {\alpha }}\otimes {\vec {\alpha }}-({\vec {\alpha }}\cdot {\vec {\alpha }}){\mathbf {I}})\end{array}}](/svg/68b2416edecaa6d41676784f7e9ba0ca33df5b6d.svg)
Urbild- und Bildvektoren gegeben
Gegeben seien drei linear
unabhängige Vektoren  ,
die demnach eine Vektorraumbasis
bilden. Die dazu duale
Basis sei
,
die demnach eine Vektorraumbasis
bilden. Die dazu duale
Basis sei  ,
so dass also
,
so dass also

gilt. Das Symbol  ist das Kronecker-Delta.
Wenn nun die Vektorgruppe
ist das Kronecker-Delta.
Wenn nun die Vektorgruppe  durch Drehung aus der Basis
hervorgeht, dann gibt es einen orthogonalen Tensor ,
für den gilt:
durch Drehung aus der Basis
hervorgeht, dann gibt es einen orthogonalen Tensor ,
für den gilt:

Dieser Tensor erhält mit dem dyadischen
Produkt „ “
von Vektoren die Form:
“
von Vektoren die Form:

Mit der zu
dualen Basis  berechnet sich
berechnet sich

weswegen nun die beiden Darstellungen

vorliegen. Derselbe Tensor
überführt also auch die dualen Basen ineinander:

Die Determinante des Tensors berechnet sich mit den obigen Darstellungen zu:

weil oben eine Drehung und damit dieselbe Händigkeit
der Basen vorausgesetzt wurde. Bei einer Drehspiegelung wäre
und die Händigkeiten der beiden Basen wäre verschieden.
Tensor gegeben
Die Drehachse eines orthogonalen Tensors
ist seine Vektorinvariante
 .
Seien die Basen
.
Seien die Basen  und deren duale Basen
und deren duale Basen  für i=1,2,3 sowie der orthogonale Tensor
wie im vorigen Abschnitt definiert. Dann ergibt sich für die Drehachse von :
für i=1,2,3 sowie der orthogonale Tensor
wie im vorigen Abschnitt definiert. Dann ergibt sich für die Drehachse von :

denn das Skalarkreuzprodukt mit dem Einheitstensor vertauscht das dyadische Produkt durch das Kreuzprodukt. Wegen

ist die Vektorinvariante tatsächlich ein Eigenvektor und daher parallel zur
Drehachse. In der Matrizendarstellung mit den Zeilen  und Spalten
und Spalten  von
bezüglich der Standardbasis
ergibt sich:
von
bezüglich der Standardbasis
ergibt sich:

Aus dem Abschnitt Drehachse und Winkel gegeben sind die folgenden Beziehungen bekannt. Der Drehwinkel berechnet sich aus der Spur

Alternativ kann Drehachse  und -winkel
aus
und -winkel
aus

ermittelt werden.
Das Eigensystem offenbart, dass die beiden konjugiert komplexen Eigenwerte
 von
Exponentialfunktionen
des Winkels sind.
von
Exponentialfunktionen
des Winkels sind.
Eigensystem
Wenn drei Vektoren  paarweise zueinander senkrecht sind und die Beträge eins haben,
paarweise zueinander senkrecht sind und die Beträge eins haben,  die Drehachse und
der Drehwinkel des Tensors
ist, dann hat dieser die Eigenwerte und -Vektoren
die Drehachse und
der Drehwinkel des Tensors
ist, dann hat dieser die Eigenwerte und -Vektoren

Die Zahl i ist die imaginäre
Einheit und e die Eulersche
Zahl. Die Vektoren  liegen in der Drehebene, sind in dieser, solange
liegen in der Drehebene, sind in dieser, solange  gewährleistet ist, aber beliebig orientiert. Aus diesem Eigensystem ergibt sich
die Darstellung
gewährleistet ist, aber beliebig orientiert. Aus diesem Eigensystem ergibt sich
die Darstellung

Die Händigkeit der Vektorgruppe
entscheidet über die Drehrichtung
der Drehung um die Drehachse.
Ist die Vektorgruppe rechtshändig,
dann misst der Winkel gegen den Uhrzeigersinn andernfalls im Uhrzeigersinn um
die Drehachse.
Invarianten
Wenn
der Drehwinkel des orthogonalen Tensors
ist, dann gilt:

denn die zweite Hauptinvariante ist die Spur des Kofaktors

Mit der obigen Darstellung

berechnen sich die Hauptinvarianten:

Die Vektorinvariante ist, wie im Abschnitt Tensor gegeben, die Drehachse, die mit dem Einheitstensor berechnet wird:

Die Frobeniusnorm eines orthogonalen Tensors ist immer gleich der Wurzel der Raumdimension:

Siehe auch
- Drehmatrix, Orthogonale Matrix, Orthogonale Abbildung
- Quaternion
- Spezielle orthogonale Gruppe, Spezielle lineare Gruppe

© biancahoegel.de
Datum der letzten Änderung: Jena, den: 16.02. 2021