Euklidische Transformation
Die euklidische Transformation, benannt nach Euklid, ist eine abstands- und damit auch winkelerhaltende Transformation des euklidischen Raumes auf sich. Bei der eigentlichen euklidischen Transformation bleibt zusätzlich die Orientierung erhalten, werden also Spiegelungen ausgeschlossen.
Mechanisch stellt die eigentliche euklidische Transformation die allgemeine Beobachtertransformation dar und bedeutet eine zeitabhängige Translation und Rotation des Bezugssystems des Beobachters. Nur die eigentlichen Transformationen sind physikalisch, weil Spiegelungen enthaltende Transformationen materieller Körper in der Natur nicht vorkommen. Anschaulich kann man sich die allgemeine Beobachtertransformation als eine Starrkörperbewegung eines Bezugssystems vorstellen, bei der der Ursprung und die angehefteten Koordinatenachsen sich beliebig bewegen, aber die Koordinatenachsen die relative Orientierung und Winkel zueinander beibehalten und nicht gedehnt oder gestaucht werden. Die Galilei-Transformation ist hierin als Spezialfall der geradlinig-gleichförmigen Bewegung enthalten.
Die euklidische Transformation wird zur Definition objektiver oder invarianter Größen benutzt, die von Beobachtern in unterschiedlich bewegten Bezugssystemen in gleicher Weise wahrgenommen werden, siehe Wechsel des Bezugssystems. Objektive Größen, die den Zustand eines materiellen Körpers beschreiben, sind in der Materialtheorie von zentraler Bedeutung, denn es entspricht nicht der Erfahrung, dass ein bewegter Beobachter ein anderes Materialverhalten misst wie ein ruhender. Diese Gesetzmäßigkeit wird materielle Objektivität genannt.
Überblick
Die Darstellung erfolgt in drei Dimensionen, kann aber in einfacher Weise auf n Dimensionen verallgemeinert werden. Die euklidische Transformation ist eine abstandserhaltende Transformation eines euklidischen Raumes auf sich. Da er eine Abstandsfunktion enthält, ist der euklidische Raum ein Metrischer Raum und die euklidische Transformation eine Isometrie. Bezüglich der Hintereinanderausführung bilden die euklidischen Transformationen eine Gruppe.
Je nachdem welche Art Euklidischer Raum zu Grunde gelegt wird, liegen verschiedene Formulierungen vor:
- Die Transformation des euklidischen Punktraumes
 ist eine Bewegung
(Mathematik), die ebenfalls eigentlich genannt wird, wenn die Orientierung
erhalten bleibt, und uneigentlich, wenn dies nicht der Fall ist.
ist eine Bewegung
(Mathematik), die ebenfalls eigentlich genannt wird, wenn die Orientierung
erhalten bleibt, und uneigentlich, wenn dies nicht der Fall ist. - Die euklidische Transformation des Koordinatenraumes
 mit dem Standardskalarprodukt
über dem Körper
mit dem Standardskalarprodukt
über dem Körper
 ist eine spezielle Koordinatentransformation,
bei der die Transformationsmatrix eine orthogonale
Matrix ist (siehe Beschreibung
in Koordinaten).
ist eine spezielle Koordinatentransformation,
bei der die Transformationsmatrix eine orthogonale
Matrix ist (siehe Beschreibung
in Koordinaten). - Die Transformation des euklidischen Vektorraumes
 (einem über
definierten Vektorraum
mit Skalarprodukt)
wird hier in einem physikalischen Zusammenhang dargestellt.
(einem über
definierten Vektorraum
mit Skalarprodukt)
wird hier in einem physikalischen Zusammenhang dargestellt.
Euklidische Transformation und Beobachterwechsel

Bei der euklidischen Transformation wird vom euklidischen
Punktraum
unserer Anschauung ausgegangen und diesem ein euklidischer Vektorraum
zugeordnet, siehe Vom
euklidischen Anschauungsraum zum euklidischen Vektorraum. Zusammenfassend
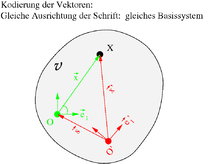
liegt jedem euklidischen Vektorraum eine längentreue Abbildung

zu Grunde, die allen parallelen, gleichsinnigen und gleich langen
Verschiebungen von Punkten  zu Punkten
zu Punkten  einen gleichlangen Vektor
einen gleichlangen Vektor  zuordnet, siehe Bild. Die Bedeutung hiervon wird in der aktiven Interpretation
des Beobachterwechsels deutlich[1].
zuordnet, siehe Bild. Die Bedeutung hiervon wird in der aktiven Interpretation
des Beobachterwechsels deutlich[1].
Passive Interpretation oder Koordinatentransformation
Durch Auswahl von vier nicht in einer Ebene liegenden Punkten  ,
von denen
,
von denen  den Ursprung darstellt, wird eine Basis
den Ursprung darstellt, wird eine Basis
 des
entworfen. Der Einfachheit halber sollen die Vektoren
paarweise senkrecht aufeinander stehen und jeweils die Länge eins haben, so dass
die Basisvektoren
des
entworfen. Der Einfachheit halber sollen die Vektoren
paarweise senkrecht aufeinander stehen und jeweils die Länge eins haben, so dass
die Basisvektoren  eine Orthonormalbasis
darstellen. Jedem Punkt
eine Orthonormalbasis
darstellen. Jedem Punkt  können nun Koordinaten
können nun Koordinaten  zugeordnet werden:
zugeordnet werden:

Ein Wechsel des Bezugssystems wird nun durch Auswahl von vier anderen Punkten
 bewerkstelligt, was auf die neue Orthonormalbasis
bewerkstelligt, was auf die neue Orthonormalbasis  führt, siehe Bild. Der Punkt
führt, siehe Bild. Der Punkt  erhält im neuen Bezugssystem andere Koordinaten
erhält im neuen Bezugssystem andere Koordinaten  :
:

Mit

ergibt sich die Vektorgleichung

Den Zusammenhang zwischen den Koordinaten beschreibt die Koordinatentransformation

Dies ist eine Matrizengleichung wie in Beschreibung
in Koordinaten oder Isometrien.
Die 3 × 3 Matrix  mit den Komponenten
mit den Komponenten  ist eine orthogonale
Matrix und daher gilt
ist eine orthogonale
Matrix und daher gilt

worin  die Einheitsmatrix
darstellt. Falls für die Determinante
die Einheitsmatrix
darstellt. Falls für die Determinante
 gilt, sind die Basen
gilt, sind die Basen  und
und  gleich orientiert
und es liegt eine eigentliche euklidische Transformation vor.
gleich orientiert
und es liegt eine eigentliche euklidische Transformation vor.
Aktive Interpretation oder koordinatenfreie Abbildung

Ein Beobachter wird meist sowohl einen anderen Ursprung  als auch eine andere Zuordnung
als auch eine andere Zuordnung  des euklidischen Punktraums zu einem Vektorraum wählen als ein anderer
Beobachter. Die Bilder von
des euklidischen Punktraums zu einem Vektorraum wählen als ein anderer
Beobachter. Die Bilder von  und
und  können höchstens verdreht sein, weil die Abbildung längentreu sein soll und eine
Verschiebung hier nicht ins Gewicht fällt, da allen parallelen, gleichsinnigen
und gleichlangen Verschiebungen von Punkten
nach Punkten
derselbe Vektor zugeordnet wird:
können höchstens verdreht sein, weil die Abbildung längentreu sein soll und eine
Verschiebung hier nicht ins Gewicht fällt, da allen parallelen, gleichsinnigen
und gleichlangen Verschiebungen von Punkten
nach Punkten
derselbe Vektor zugeordnet wird:

worin  ein orthogonaler
Tensor ist (
ein orthogonaler
Tensor ist ( mit Einheitstensor
mit Einheitstensor
 ),
siehe Bild. Nun ist
),
siehe Bild. Nun ist

Diese Vektorgleichung ist koordinatenfrei, bezieht sich also auf kein
Koordinaten- oder Basissystem. Anders als in der passiven Interpretation wird
hier die Fähigkeit von Tensoren (hier )
ausgenutzt, Vektoren von einem Vektorraum (dem Bildraum von )
in einen anderen, den Bildraum von ,
abzubilden, wobei in diesem Fall die beiden Bildräume identisch sind. Falls
 liegt wiederum eine eigentliche euklidische Transformation vor. Weil jeder
Tensor eine lineare Abbildung ist, entspricht dieses Vorgehen der Beschreibung
mit Hilfe von linearen Abbildungen.
liegt wiederum eine eigentliche euklidische Transformation vor. Weil jeder
Tensor eine lineare Abbildung ist, entspricht dieses Vorgehen der Beschreibung
mit Hilfe von linearen Abbildungen.
Der scheinbare Widerspruch  löst sich auf, wenn die verschiedenen Basissysteme links und rechts des
Gleichheitszeichens berücksichtigt werden:
löst sich auf, wenn die verschiedenen Basissysteme links und rechts des
Gleichheitszeichens berücksichtigt werden:

womit
die komponentenweise Darstellung

mit  wie in der passiven Interpretation, bekommt, was die Äquivalenz der passiven und
aktiven Interpretationen
unterstreicht.
wie in der passiven Interpretation, bekommt, was die Äquivalenz der passiven und
aktiven Interpretationen
unterstreicht.
Transformation der Zeit
Ein Beobachterwechsel beinhaltet auch einen Wechsel im Zeitmaßstab. In der
euklidischen Transformation ist nur eine konstante Versetzung  vorgesehen:
vorgesehen:

was so zu verstehen ist, dass die Beobachter zum selben Zeitpunkt verschiedene Werte auf ihren Uhren ablesen, die Differenz der Werte aber immer dieselbe ist. Die Beobachter haben also ihre Stoppuhren zu verschiedenen Zeiten gestartet.
Allgemeiner Beobachterwechsel
Ein allgemeiner Beobachterwechsel lässt sich also mathematisch wie folgt beschreiben:

weil Drehspiegelungen (mit  )
unphysikalisch sind. Die Galilei-Transformation
ist hierin als der Spezialfall der gleichförmigen Bewegung
)
unphysikalisch sind. Die Galilei-Transformation
ist hierin als der Spezialfall der gleichförmigen Bewegung
 und
und 
enthalten, worin  eine konstante Verschiebung,
eine konstante Verschiebung,  eine konstante Geschwindigkeit und
eine konstante Geschwindigkeit und  eine konstante Verdrehung benennen.
eine konstante Verdrehung benennen.
Objektive oder invariante Größen
Größen, die bei einem Wechsel des Bezugssystems unverändert wahrgenommen
werden, werden objektiv oder invariant genannt. Einführend sei der Abstand
zweier Punkte betrachtet: Bei jeder euklidischen Transformation bleibt der
Abstand zwischen zwei beliebigen Punkten immer konstant und das gilt auch beim
allgemeinen Beobachterwechsel. Seien  und
und  die Ortsvektoren zweier Punkte .
Das Quadrat ihres Abstandes
die Ortsvektoren zweier Punkte .
Das Quadrat ihres Abstandes
![{\begin{array}{lcl}d'^{2}&=&({\vec {p}}'-{\vec {q}}')\cdot ({\vec {p}}'-{\vec {q}}')=({\vec {s}}+{\mathbf {Q}}\cdot {\vec {p}}-{\vec {s}}-{\mathbf {Q}}\cdot {\vec {q}})\cdot ({\vec {s}}+{\mathbf {Q}}\cdot {\vec {p}}-{\vec {s}}-{\mathbf {Q}}\cdot {\vec {q}})=[{\mathbf {Q}}\cdot ({\vec {p}}-{\vec {q}})]\cdot [{\mathbf {Q}}\cdot ({\vec {p}}-{\vec {q}})]\\&=&({\vec {p}}-{\vec {q}})\cdot {\mathbf {Q^{\top }\cdot Q}}\cdot ({\vec {p}}-{\vec {q}})=({\vec {p}}-{\vec {q}})\cdot ({\vec {p}}-{\vec {q}})={d}^{2}\end{array}}](/svg/f555541aea8177cb10d36707e5d743b1f2050f9d.svg)
bleibt also unverändert, wenn  ist und sich der Abstandsvektor
ist und sich der Abstandsvektor  gemäß
gemäß

transformiert. Letzteres kennzeichnet objektive Vektoren. Die
Transformationseigenschaft für objektive Tensoren leitet sich aus der Forderung
ab, dass ein objektiver Tensor objektive Vektoren auf objektive Vektoren
abbildet. Bei objektiven Vektoren
und  soll also
soll also  ebenfalls objektiv sein. Aus
ebenfalls objektiv sein. Aus  ,
,
 und
und  resultiert:
resultiert:

Soll dies für alle objektiven Vektoren
und
gelten, so muss sich der Tensor gemäß

transformieren.
Transformationseigenschaften objektiver Größen
Eine Größe ist objektiv, wenn sie sich bei einem Beobachterwechsel wie folgt transformiert:
| Typ | Bedingung |
|---|---|
Skalar
 | |
| Vektor |
 |
Tensor  |
 |
Geschwindigkeiten und Beschleunigung
Die Geschwindigkeit ist wegen

keine objektive Größe und gleiches gilt für die Beschleunigung:

Nur im Spezialfall der Galilei-Transformation
ist wegen  und
und  die Beschleunigung objektiv. Es kann aber gezeigt werden, dass die Absolutgeschwindigkeit
und die Absolutbeschleunigung objektiv sind.
die Beschleunigung objektiv. Es kann aber gezeigt werden, dass die Absolutgeschwindigkeit
und die Absolutbeschleunigung objektiv sind.
Die Zeitableitung eines objektiven Vektors
ist wegen

meist nicht objektiv und gleiches gilt für die Zeitableitung eines objektiven
Tensors :

Für die Formulierung ratenabhängiger Materialmodelle
werden in der räumlichen
Betrachtungsweise objektive Zeitableitungen für konstitutive Variablen
benötigt, denn es entspricht nicht der Erfahrung, dass ein bewegter Beobachter
ein anderes Materialverhalten misst als ein ruhender. Somit müssen die
Materialmodelle mit objektiven Zeitableitungen formuliert werden. Der Deformationsgradient
 beschreibt die lokalen Verformungen an einem Punkt im Material und entsprechend
enthält er auch alle Informationen zu Verformungsraten. Es wird der räumliche
Geschwindigkeitsgradient
beschreibt die lokalen Verformungen an einem Punkt im Material und entsprechend
enthält er auch alle Informationen zu Verformungsraten. Es wird der räumliche
Geschwindigkeitsgradient

definiert, dessen symmetrischer Anteil

räumlicher Verzerrungsgeschwindigkeitstensor und dessen unsymmetrische Anteil

Wirbeltensor oder Spintensor heißt. Diese Tensoren werden, weil sie räumlich formuliert sind, klein geschrieben. In der Materialtheorie interessieren besonders objektive Raten von Verzerrungstensoren und Spannungstensoren. Es wurden mehrere Raten definiert, unter anderem[2]:
Zaremba-Jaumann
Ableitung: 

Kontravariante
Oldroyd Ableitung: 
Cauchy-Ableitung[4]:

Die Zaremba-Jaumann Spannungs-Geschwindigkeit
gibt die zeitliche Änderung der Spannungen im bewegten Bezugssystem an. Ein
Beobachter, der mit dem materiellen Element rotiert, stellt die zeitliche
Änderung  der Spannungen
fest.
der Spannungen
fest.
Für einen objektiven Vektor
sind die Zeitableitungen

objektiv.
Objektivität und algebraische Verknüpfungen
Eine algebraische Verknüpfung von
objektiven Größen ist wieder objektiv. Als algebraische Verknüpfung kommt je
nach Typ Addition, Multiplikation, Multiplikation mit einem Skalar, Skalarprodukt, Kreuzprodukt, dyadisches Produkt
und Matrizenmultiplikation
in Frage.
| Operation | Gleichung |
|---|---|
| Skalare | |
| Addition |  |
| Multiplikation |  |
| Vektoren | |
| Addition |  |
| Multiplikation mit einem Skalar |  |
| Skalarprodukt |  |
| Kreuzprodukt |  |
| Dyadisches Produkt |  |
| Tensoren | |
| Addition |  |
| Multiplikation mit einem Skalar |  |
| Skalarprodukt |  |
| Vektortransformation |  |
| Matrizenmultiplikation |  |
Liste objektiver Größen
Die folgende Aufstellung gibt eine Auswahl an objektiven Größen.
Skalare
- Geometrie: Abstand, Flächeninhalt (Betrag), Volumen (Betrag). Die Volumenform ist nur bei
eigentlichen euklidischen Transformationen mit
objektiv.
- Physik: Temperatur, Masse, Innere Energie und Entropie sind objektive Skalare. Hieraus kann abgeleitet werden, dass auch die auf die Masse oder das Volumen bezogenen spezifischen Größen objektiv sind: Dichte, spezifische innere Energie und spezifische Entropie.
Vektoren
- Geometrie: Abstandsvektor, Linienelement; das Oberflächenelement
ist nur bei eigentlichen euklidischen Transformationen mit
objektiv.
- Kinematik: absolute Geschwindigkeit, absolute Beschleunigung
- Physik: Kraft, Spannungsvektor, Wärmeflussvektor und der Temperaturgradient
Tensoren
Die obige Transformationseigenschaften für Tensoren gelten für sogenannte räumliche ein-Feld-Tensoren, deren Definitions- und Wertebereich mit der Bewegung rotieren. Daneben existieren in der Kontinuumsmechanik körperbezogene ein-Feld Tensoren, deren Definitions- und Wertebereich durch die Referenzkonfiguration bewegungsunabhängig materiell festgelegt ist, die also für alle Beobachter gleich ist. Die Bildvektoren dieser Konfigurationen sind – anschaulich gesprochen – für alle Beobachter wie ein Etikett lesbar an einen materiellen Punkt geheftet. Objektive Tensoren diesen Typs transformieren sich gemäß

Des Weiteren kennt die Kontinuumsmechanik zwei-Feld-Tensoren, die Vektoren und Tensoren zwischen zwei Konfigurationen transformieren. Ein Beispiel hierfür ist der erste Piola-Kirchhoff Spannungstensor, der in konvektiven Koordinaten die Form

besitzt. Darin sind  Basisvektoren in der bewegungsunabhängigen materiellen Referenzkonfiguration,
Basisvektoren in der bewegungsunabhängigen materiellen Referenzkonfiguration,
 Basisvektoren in der bewegten räumlichen Momentankonfiguration und
Basisvektoren in der bewegten räumlichen Momentankonfiguration und  die Komponenten des Tensors. Wenn nun die Basisvektoren
die Komponenten des Tensors. Wenn nun die Basisvektoren  für alle Beobachter gleich sind, d.h. es gilt
für alle Beobachter gleich sind, d.h. es gilt

und die Basisvektoren  objektiv sind, sich also gemäß
objektiv sind, sich also gemäß

transformieren, dann ist also ein solcher zwei-Feld-Tensor
objektiv, wenn er sich gemäß

also wie ein objektiver Vektor transformiert.
Die folgenden Tensoren werden auf den Seiten Strecktensor,
Verzerrungstensor,
Geschwindigkeitsgradient,
Spannungstensor und Kontinuumsmechanik
erwähnt. Weil spiegelnde Transformationen materieller Körper in der Realität
nicht vorkommen wird
vorausgesetzt.
| Name | Nicht objektiv | Objektiv (allgemein) | Körperbezogen objektiv | Objektiver zwei-Feld Tensor |
|---|---|---|---|---|
Deformationsgradient
 |
 | |||
Rechter Strecktensor  |
x | |||
Linker Strecktensor  |
x | |||
Rotationstensor  |
 | |||
Rechter Cauchy-Green Tensor  |
x | |||
Linker Cauchy-Green Tensor  |
x | |||
Green-Lagrange-Verzerrungstensor  |
x | |||
Euler-Almansi-Verzerrungstensor  |
x | |||
Cauchy’scher Spannungstensor  |
x | |||
Erster Piola-Kirchoff’scher Spannungstensor  |
 | |||
Zweiter Piola-Kirchoff’scher Spannungstensor  |
x | |||
| Geschwindigkeiten | ||||
Räumlicher Geschwindigkeitsgradient  |
 |
|||
Räumlicher Verzerrungsgeschwindigkeitstensor  |
x | |||
Spintensor  |
 |
|||
Materieller Verzerrungsgeschwindigkeitstensor  |
x | |||
Materielle Zeitableitung  von
von  |
längere Formel | |||
Oldroyd Ableitung der Euler-Almansi-Dehnungen  |
x | |||
Beispiel
Es wird der Nachweis der Objektivität der Zaremba-Jaumann Rate eines objektiven Tensors gegeben. Zu zeigen ist

Mit
und

bekommt man

Nun kann man

ausnutzen und erhält

also das gewünschte Ergebnis.
Siehe auch
- Orthogonale Abbildung, Orthogonale Matrix oder Drehmatrix
- Materialmodell
- Isotrope Funktion
- Hauptinvariante
Fußnoten
- ↑ Der "aktive" und "passive" Beobachterwechsel sind nicht zu verwechseln mit der aktiven Bewegung, bei der sich ein Objekt bewegt, und der passiven Bewegung, bei der sich der Beobachter relativ zum ruhenden Objekt bewegt.
- ↑
Die Formelzeichen für die objektiven Raten
variieren von Quelle zu Quelle. Die hier angegebenen folgen P. Haupt, S. 48ff.
In H. Altenbach wird
 für
und
für
und  für
für  benutzt.
benutzt. - ↑ Diese Ableitung kommt in der Cauchy-Elastizität vor und wird auch nach C. Truesdell benannt. Er selbst benannte die Ableitung aber nach Cauchy und schrieb 1963, dass diese Rate ohne erfindlichen Grund nach ihm benannt wurde ( „came to be named, for no good reason, after [...] me“ ) siehe C. Truesdell: Remarks on Hypo-Elasticity, Journal of Research of the National Bureau of Standards - B. Mathematics and Mathematical Physics, Vol. 67B, No. 3, July-September 1963, S. 141.


© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 15.12. 2020