Geschwindigkeitsgradient
Der (räumliche) Geschwindigkeitsgradient (Formelzeichen l oder L, Dimension T -1) ist in der Kontinuumsmechanik ein Mittel zur Beschreibung der lokalen Verformungsgeschwindigkeit eines Körpers. Der Körper mag fest, flüssig oder gasförmig sein und der Begriff der Verformung wird hier so weit gefasst, dass auch das Fließen einer Flüssigkeit und das Strömen eines Gases darunter fallen. Als Gradient bemisst der Geschwindigkeitsgradient die örtlichen Änderungen des Geschwindigkeitsfeldes. In kartesischen Koordinaten hat er die Form:

Die Komponenten  sind die Geschwindigkeitsanteile in x-, y- bzw. z-Richtung. Der räumliche
Geschwindigkeitsgradient enthält alle Informationen über die
bezugssysteminvarianten Schergeschwindigkeiten,
die Divergenz
und die Winkelgeschwindigkeit
oder Wirbelstärke
des Geschwindigkeitsfeldes.
sind die Geschwindigkeitsanteile in x-, y- bzw. z-Richtung. Der räumliche
Geschwindigkeitsgradient enthält alle Informationen über die
bezugssysteminvarianten Schergeschwindigkeiten,
die Divergenz
und die Winkelgeschwindigkeit
oder Wirbelstärke
des Geschwindigkeitsfeldes.
Der Geschwindigkeitsgradient wird bei der mathematischen Formulierung von physikalischen Gesetzen und Materialmodellen benutzt und ist – vergleichbar zum Deformationsgradienten bezüglich der Deformation von Festkörpern – in der Strömungsmechanik von zentraler Bedeutung.
Beschreibung
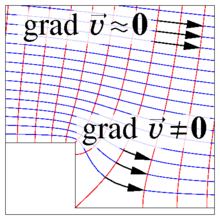
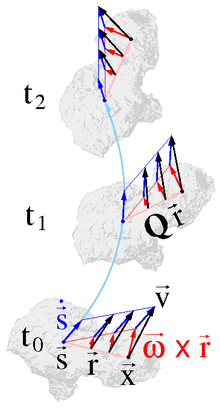
Das Geschwindigkeitsfeld eines Körpers gibt an, wie schnell sich die einzelnen Partikel (Fluidelemente) des Körpers bewegen, siehe Abb. 1. Wenn sich der Körper gleichförmig bewegt, dann sind die Geschwindigkeiten benachbarter Partikel gleich und der Geschwindigkeitsgradient verschwindet, denn als Gradient bemisst er die örtlichen Änderungen, siehe den oberen Bildteil. Wenn sich aber die Geschwindigkeiten zweier benachbarter Partikel unterscheiden, dann liegt lokal entweder eine Drehung oder eine Deformation vor und der Geschwindigkeitsgradient ist von null verschieden wie im unteren Bildteil.
Das Geschwindigkeitsfeld kann für die sich bewegenden Partikel eines Körpers oder an den Raumpunkten innerhalb des Körpers aufgestellt werden. Ersteres ist die materielle letzteres die räumliche Formulierung. Weil das Geschwindigkeitsfeld üblicherweise räumlich begriffen wird, bezieht sich der Begriff „Geschwindigkeitsgradient“ zumeist auf den räumlichen Geschwindigkeitsgradient und dieser wird hier vorrangig behandelt.
Der räumliche Geschwindigkeitsgradient taucht in den lokalen, räumlichen Formulierungen der Massen-, Impuls- und Energiebilanzen auf und ist für die kinematische Nichtlinearität der Impulsbilanz in dieser Formulierung verantwortlich.
Der Bewegungszustand eines Beobachters beeinflusst seine Einschätzung der Geschwindigkeit der Partikel des Körpers und damit auch den von ihm beobachteten Geschwindigkeitsgradient. Weil also unterschiedlich bewegte Beobachter verschiedene Geschwindigkeitsgradienten wahrnehmen, ist dieser keine objektive Größe. Mit dem räumlichen Geschwindigkeitsgradient werden objektive Zeitableitungen von Vektoren und Tensoren definiert, die für die Formulierung bezugssysteminvarianter Materialgleichungen benötigt werden. Mehr zu dem Thema ist unter Euklidische Transformation zu finden.
 durch einen Tensor
durch einen Tensor  .
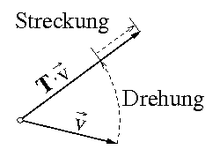
.Mathematisch ist der Geschwindigkeitsgradient ein Tensor zweiter Stufe, mit dem Vektoren linear auf andere Vektoren abgebildet werden, siehe Abb. 2. Ein solcher Tensor kann wie eine 3×3 Matrix betrachtet werden, deren Komponenten auf Dyaden referenzieren so wie die Komponenten eines Vektors auf Basisvektoren referenzieren.
Die Summe der Diagonalelemente, die Spur, ist die Divergenz des Geschwindigkeitsfeldes und ein Maß für die Ausdehnungsgeschwindigkeit eines (infinitesimal) kleinen Volumenelementes des Körpers.
Der symmetrische Anteil des räumlichen Geschwindigkeitsgradienten, der räumliche Verzerrungs-, Streck- oder Deformationsgeschwindigkeitstensor (Formelzeichen d oder D) verschwindet bei Starrkörperbewegungen inklusive Drehungen, tritt also nur bei „echten“ Verformungen auf und ist objektiv. Der Verzerrungsgeschwindigkeitstensor wird in Materialmodellen geschwindigkeitsabhängiger Materialien eingesetzt, z.B. beim linear viskosen Fluid, dessen Geschwindigkeitsfeld den Navier-Stokes-Gleichungen gehorcht, die Fluidströmungen wirklichkeitsnah abbilden.
Der schiefsymmetrische
Anteil des räumlichen Geschwindigkeitsgradienten, der Wirbel-,
Spin- oder Drehgeschwindigkeitstensor (Formelzeichen w oder
W) besitzt einen dualen Vektor  die Winkelgeschwindigkeit,
die proportional zum Wirbelvektor oder der Wirbelstärke ist,
die in Flüssigkeits- und Gasströmungen eine wichtige Rolle spielt.
die Winkelgeschwindigkeit,
die proportional zum Wirbelvektor oder der Wirbelstärke ist,
die in Flüssigkeits- und Gasströmungen eine wichtige Rolle spielt.
Definition und Darstellungsweisen
Materielle und räumliche Koordinaten und das Geschwindigkeitsfeld
Die Bewegung eines materiellen Punktes (Fluidelementes) wird mathematisch mit der Bewegungsfunktion
beschrieben. Der Vektor  ist die aktuelle Position des materiellen Punktes
ist die aktuelle Position des materiellen Punktes  zur Zeit
zur Zeit  in der Momentankonfiguration
(Kleinbuchstaben). Genauer ist
die Position des betrachteten materiellen Punktes in der Ausgangs- oder
Referenzkonfiguration des Körpers zu einer vergangenen Zeit
in der Momentankonfiguration
(Kleinbuchstaben). Genauer ist
die Position des betrachteten materiellen Punktes in der Ausgangs- oder
Referenzkonfiguration des Körpers zu einer vergangenen Zeit  (Großbuchstaben). Bei festgehaltenem materiellen Punkt
gibt die Bewegungsfunktion dessen Bahnlinie
durch den Raum wieder und bei festgehaltenem räumlichen Punkt
gibt
(Großbuchstaben). Bei festgehaltenem materiellen Punkt
gibt die Bewegungsfunktion dessen Bahnlinie
durch den Raum wieder und bei festgehaltenem räumlichen Punkt
gibt  die Streichlinie durch den
betrachteten Punkt wieder. Im kartesischen Koordinatensystem mit der Standardbasis
die Streichlinie durch den
betrachteten Punkt wieder. Im kartesischen Koordinatensystem mit der Standardbasis  hat der Raumpunkt
die komponentenweise Darstellung
hat der Raumpunkt
die komponentenweise Darstellung

und entsprechend gilt  .
Die Zahlen
.
Die Zahlen  werden räumliche Koordinaten genannt, weil diese einen Raumpunkt
kennzeichnen, und
werden räumliche Koordinaten genannt, weil diese einen Raumpunkt
kennzeichnen, und  werden materielle Koordinaten genannt, denn diese haften einem
materiellen Punkt an. Die Bewegungsfunktion ist zu jeder Zeit an jedem Ort
invertierbar
werden materielle Koordinaten genannt, denn diese haften einem
materiellen Punkt an. Die Bewegungsfunktion ist zu jeder Zeit an jedem Ort
invertierbar

weil sich an einem Punkt im Raum immer nur ein materieller Punkt aufhalten kann und ein materieller Punkt zu einer Zeit nur an einem Ort sein kann. Die Ableitung der Bewegungsfunktion nach der Zeit liefert das Geschwindigkeitsfeld:

Die materiellen Koordinaten
gehören zu dem Partikel, das sich zur Zeit t am Ort
befindet und dessen Geschwindigkeit zu dem Zeitpunkt  ist. Das Geschwindigkeitsfeld wird üblicherweise räumlich begriffen weshalb es
hier nur in der räumlichen Darstellung mit
(für englisch velocity „Geschwindigkeit“)
bezeichnet wird. Ganz rechts steht das materielle Geschwindigkeitsfeld, das mit
der substantiellen
Zeitableitung der Bewegungsfunktion berechnet wird. Die Punktnotation
wird hier ausschließlich für die substantielle Zeitableitung verwendet.
ist. Das Geschwindigkeitsfeld wird üblicherweise räumlich begriffen weshalb es
hier nur in der räumlichen Darstellung mit
(für englisch velocity „Geschwindigkeit“)
bezeichnet wird. Ganz rechts steht das materielle Geschwindigkeitsfeld, das mit
der substantiellen
Zeitableitung der Bewegungsfunktion berechnet wird. Die Punktnotation
wird hier ausschließlich für die substantielle Zeitableitung verwendet.
Geschwindigkeitsgradient und Deformationsgradient
Der Deformationsgradient ist die Ableitung der Bewegung nach den materiellen Koordinaten[F 1]:

Das Rechenzeichen „ “
bildet das dyadische
Produkt und „GRAD“ den materiellen Gradienten mit Ableitungen nach den
materiellen Koordinaten. Durch die substantielle Zeitableitung des
Deformationsgradienten entstehen die Geschwindigkeitsgradienten:
“
bildet das dyadische
Produkt und „GRAD“ den materiellen Gradienten mit Ableitungen nach den
materiellen Koordinaten. Durch die substantielle Zeitableitung des
Deformationsgradienten entstehen die Geschwindigkeitsgradienten:

Das Rechenzeichen „“
bildet das dyadische
Produkt, „grad“ den räumlichen und „GRAD“ den materiellen Gradient mit
Ableitungen nach den räumlichen bzw. den materiellen Koordinaten. Der
materielle Geschwindigkeitsgradient  ist die Zeitableitung des Deformationsgradienten oder – weil die Reihenfolge der
Ableitungen vertauscht werden darf – die materielle Ableitung der
Geschwindigkeit nach den materiellen Koordinaten:
ist die Zeitableitung des Deformationsgradienten oder – weil die Reihenfolge der
Ableitungen vertauscht werden darf – die materielle Ableitung der
Geschwindigkeit nach den materiellen Koordinaten:

Räumlicher Geschwindigkeitsgradient
Der räumliche Geschwindigkeitsgradient  ist die räumliche Ableitung der Geschwindigkeit nach den räumlichen
Koordinaten[F
1]:
ist die räumliche Ableitung der Geschwindigkeit nach den räumlichen
Koordinaten[F
1]:

Das Geschwindigkeitsfeld wird meistens räumlich dargestellt, weshalb mit dem Begriff „Geschwindigkeitsgradient“ in der Regel der räumliche Geschwindigkeitsgradient gemeint ist. Materielle Größen werden in der Kontinuumsmechanik gemeinhin groß geschrieben und räumliche klein, weswegen hier auch die Kleinschreibung des räumlichen Geschwindigkeitsgradienten benutzt wird. Sein symmetrischer Anteil

ist der (räumliche) Verzerrungsgeschwindigkeitstensor und sein schiefsymmetrischer Anteil

ist der (räumliche) Spin-, Wirbel- oder Drehgeschwindigkeitstensor. Das
Superskript  kennzeichnet die Transposition.
In den Matrixdarstellungen beziehen sich die Geschwindigkeitsanteile
auf ein kartesisches
Koordinatensystem mit x-, y- und z-Richtungen.
kennzeichnet die Transposition.
In den Matrixdarstellungen beziehen sich die Geschwindigkeitsanteile
auf ein kartesisches
Koordinatensystem mit x-, y- und z-Richtungen.
Die Winkelgeschwindigkeit oder Wirbelstärke
Dem Wirbeltensor kann, weil er schiefsymmetrisch
ist, ein dualer
Vektor
mit der Eigenschaft

zugeordnet werden. Der Tensor 1 ist der Einheitstensor, „“
das dyadische
und „ד das Kreuzprodukt.
Im Fall des Wirbeltensors ist der duale Vektor die Winkelgeschwindigkeit,
die der Drehgeschwindigkeitsvektor bei Starrkörperbewegungen ist, wie der
gleichnamige Abschnitt unten ausführt. Die Winkelgeschwindigkeit berechnet sich
mit dem Nabla-Operator

nach der Vorschrift
![{\displaystyle {\vec {\omega }}=-{\frac {1}{2}}\mathbf {1\cdot \!\!\times w} =-{\frac {1}{2}}\mathbf {1} \cdot \!\times {\frac {1}{2}}{\bigl [}\overbrace {(\nabla \otimes {\vec {v}})^{\top }} ^{=\operatorname {grad} {\vec {v}}=\mathbf {l} }-\overbrace {\nabla \otimes {\vec {v}}} ^{\mathbf {l} ^{\top }}{\bigr ]}:=-{\frac {1}{4}}(-\nabla \times {\vec {v}}-\nabla \times {\vec {v}})={\frac {1}{2}}\nabla \times {\vec {v}}={\frac {1}{2}}\operatorname {rot} ({\vec {v}})\,,}](/svg/7850b2c4c13b767e67f159da78e2c0922c594169.svg)
denn das Skalarkreuzprodukt
„ “
des Einheitstensors mit einer Dyade vertauscht das dyadische Produkt mit dem
Kreuzprodukt. Der Differentialoperator „rot“ steht für die Rotation
des Geschwindigkeitsfeldes.
“
des Einheitstensors mit einer Dyade vertauscht das dyadische Produkt mit dem
Kreuzprodukt. Der Differentialoperator „rot“ steht für die Rotation
des Geschwindigkeitsfeldes.
Die Winkelgeschwindigkeit ist proportional zur Wirbelstärke, die eine besondere Bedeutung in Flüssigkeits- und Gasströmungen hat.
Darstellung in Zylinder- und Kugelkoordinaten
In achsensymmetrischen
Strömungen bietet es sich an, ein Zylinder- oder Kugelkoordinatensystem
zu benutzen. In Zylinderkoordinaten {ρ,φ,z} mit Basisvektoren  bekommt er die Form:
bekommt er die Form:

In Kugelkoordinaten {r,θ,φ} mit Basisvektoren  schreibt er sich:
schreibt er sich:

Darstellung in konvektiven Koordinaten
Konvektive Koordinaten sind krummlinige Koordinatensysteme, die an einen Körper gebunden sind und von allen Deformationen, die der Körper erfährt, mitgeführt werden, siehe Bild. Konvektive Koordinatensysteme werden in der Kinematik schlanker oder dünnwandiger Strukturen (z.B. Stäbe oder Schalen) eingesetzt. Auch materielle Vorzugsrichtungen nicht isotroper Materialien, wie z.B. von Holz, können in konvektiven Koordinaten beschrieben werden. Die Geschwindigkeitsgradienten bekommen, in konvektiven Koordinaten ausgedrückt, besonders einfache Darstellungen.
Jedem materiellen Punkt
werden über eine Referenzkonfiguration
eineindeutig
konvektive Koordinaten  zugeordnet. Die Tangentenvektoren
zugeordnet. Die Tangentenvektoren

bilden dann kovariante Basen im Punkt
bzw.  .
Die Gradienten der konvektiven Koordinaten
.
Die Gradienten der konvektiven Koordinaten

bzw.

formen die kontravarianten Basen, die zu den kovarianten dual sind. In diesen Basissystemen ausgedrückt, bekommt der Deformationsgradient die besonders einfache Form

Aus der Zeitableitung des Deformationsgradienten und der Zeitableitung der Inversen ergibt sich

denn die Ausgangskonfiguration und die in ihr definierten Basisvektoren hängen nicht von der Zeit ab. Mit diesen Ergebnissen schreibt sich der räumliche Geschwindigkeitsgradient:

worin das Verschwinden der Zeitableitung des Einheitstensors 1 ausgenutzt wurde. Die Geschwindigkeitsgradienten bilden die Basisvektoren auf ihre Raten ab:

Der symmetrische Anteil des räumlichen Geschwindigkeitsgradienten ist der Verzerrungsgeschwindigkeitstensor:

Mit den Metrikkoeffizienten
 und
und  sowie der Produktregel
schreibt sich das:
sowie der Produktregel
schreibt sich das:

Die Frobenius-Skalarprodukte
 bleiben bei einer Rotation oder Translation unverändert, weswegen der
Verzerrungsgeschwindigkeitstensor genau dann verschwindet, nämlich bei
Starrkörperbewegungen.
bleiben bei einer Rotation oder Translation unverändert, weswegen der
Verzerrungsgeschwindigkeitstensor genau dann verschwindet, nämlich bei
Starrkörperbewegungen.
Geometrische Linearisierung
In der Festkörpermechanik treten in vielen Anwendungsbereichen nur kleine
Deformationen auf. In diesem Fall erfahren die Gleichungen der
Kontinuumsmechanik eine erhebliche Vereinfachung durch geometrische
Linearisierung. Dazu werden die Verschiebungen  betrachtet, die ein materieller Punkt
im Laufe seiner Bewegung erfährt. Weil
die aktuelle Position des Punktes ist, der in der Ausgangskonfiguration die
Position
hatte, ist die Verschiebung die Differenz
betrachtet, die ein materieller Punkt
im Laufe seiner Bewegung erfährt. Weil
die aktuelle Position des Punktes ist, der in der Ausgangskonfiguration die
Position
hatte, ist die Verschiebung die Differenz

Der materielle Gradient der Verschiebungen ist der Tensor

und wird Verschiebungsgradient
genannt. Er unterscheidet sich vom Deformationsgradient nur durch den
Einheitstensor 1. Wenn  eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl
eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl  als auch
als auch  und hier
und hier  gefordert, so dass alle Terme, die höhere Potenzen von
gefordert, so dass alle Terme, die höhere Potenzen von  oder
oder  beinhalten, vernachlässigt werden können. Dann gilt:
beinhalten, vernachlässigt werden können. Dann gilt:

Der Tensor  ist der linearisierte
Verzerrungstensor und RL ist der linearisierte
Rotationstensor. Eine Unterscheidung des materiellen und räumlichen
Geschwindigkeitsgradienten ist bei kleinen Deformationen demnach nicht nötig.
ist der linearisierte
Verzerrungstensor und RL ist der linearisierte
Rotationstensor. Eine Unterscheidung des materiellen und räumlichen
Geschwindigkeitsgradienten ist bei kleinen Deformationen demnach nicht nötig.
Transformationseigenschaften
Linien-, Flächen- und Volumenelemente
Der räumliche Geschwindigkeitsgradient transformiert in der Momentankonfiguration die Linien-, Flächen- und Volumenelemente in ihre Raten:

Darin ist  (für englisch area „Fläche“) das vektorielle
Oberflächenelement und
(für englisch area „Fläche“) das vektorielle
Oberflächenelement und  (für englisch volume „Volumen“) das
Volumenelement. Der Operator
(für englisch volume „Volumen“) das
Volumenelement. Der Operator  berechnet die Spur
seines Argumentes, die im Fall des Geschwindigkeitsgradienten die Divergenz
des Geschwindigkeitsfeldes ist:
berechnet die Spur
seines Argumentes, die im Fall des Geschwindigkeitsgradienten die Divergenz
des Geschwindigkeitsfeldes ist:

| Beweis |
Der Deformationsgradient
F transformiert die Linien-, Flächen- und Volumenelement von der
Referenzkonfiguration in die Momentankonfiguration: Der Operator  bildet die Determinante
und
bildet die Determinante
und  die transponiert
Inverse.
Die Oberfläche des Körpers in der Referenzkonfiguration hat das Oberflächenelement
die transponiert
Inverse.
Die Oberfläche des Körpers in der Referenzkonfiguration hat das Oberflächenelement
 ,
d.h. die mit dem Flächenstück ,
d.h. die mit dem Flächenstück  multiplizierte Normale
multiplizierte Normale  des Flächenstücks, und Gleiches gilt für das räumliche Flächenelement
auf der Oberfläche des Körpers in der Momentankonfiguration. Materielle
Zeitableitung (bei festgehaltenen Partikeln) liefert für das
Linienelement:
des Flächenstücks, und Gleiches gilt für das räumliche Flächenelement
auf der Oberfläche des Körpers in der Momentankonfiguration. Materielle
Zeitableitung (bei festgehaltenen Partikeln) liefert für das
Linienelement: Die materielle Zeitableitung des Volumenelements ergibt sich mit der Ableitung der Determinante aus ![\begin{align}
\frac{\mathrm{D}}{\mathrm{D}t}(\mathrm{d}v)
=& \frac{\mathrm{D}}{\mathrm{D}t}[\operatorname{det}(\mathbf{F})\mathrm{d}V]
=\operatorname{det}(\mathbf{F})(\mathbf{F}^{\top -1}:\dot{\mathbf{F}})\mathrm{d}V
=\operatorname{Sp}(\mathbf{F}^{-1}\cdot\dot{\mathbf{F}})\mathrm{d}v
=\operatorname{Sp}(\dot{\mathbf{F}}\cdot\mathbf{F}^{-1})\mathrm{d}v
=\operatorname{Sp}(\mathbf{l})\mathrm{d}v
\,.\end{align}](/svg/c51bbddb4babc173a17a415bbf02e6a687777ed4.svg) Der Doppelpunkt „:“ steht für das Frobenius-Skalarprodukt von Tensoren, das für zwei Tensoren A und B über  definiert ist. Der Gradient eines Vektorfeldes ist mit dem Nabla-Operator und
dem dyadischen
Produkt „“
definiert:
definiert ist. Der Gradient eines Vektorfeldes ist mit dem Nabla-Operator und
dem dyadischen
Produkt „“
definiert:  Die Spur eines dyadischen Produkts ist das Skalarprodukt ihrer Faktoren:
Die Spur eines dyadischen Produkts ist das Skalarprodukt ihrer Faktoren:
 denn die Transposition hat keinen Einfluss auf die Spur. Das Skalarprodukt
des Nabla-Operators mit dem Geschwindigkeitsfeld ist aber dessen
Divergenz:
denn die Transposition hat keinen Einfluss auf die Spur. Das Skalarprodukt
des Nabla-Operators mit dem Geschwindigkeitsfeld ist aber dessen
Divergenz:  Also ist die Spur des Geschwindigkeitsgradienten gleich der Divergenz des
Geschwindigkeitsfeldes.
Also ist die Spur des Geschwindigkeitsgradienten gleich der Divergenz des
Geschwindigkeitsfeldes.Abschließend berechnet sich noch die materielle Zeitableitung des Flächenelements mit der Produktregel zu ![{\displaystyle {\begin{aligned}{\frac {\mathrm {D} }{\mathrm {D} t}}(\mathrm {d} {\vec {a}})=&{\frac {\mathrm {D} }{\mathrm {D} t}}(\operatorname {det} (\mathbf {F} )\mathbf {F} ^{\top -1}\cdot \mathrm {d} {\vec {A}})=[\operatorname {det} (\mathbf {F} )(\mathbf {F} ^{\top -1}:{\dot {\mathbf {F} }})\mathbf {F} ^{\top -1}-\operatorname {det} (\mathbf {F} )\mathbf {F} ^{\top -1}\cdot {\dot {\mathbf {F} }}^{\top }\cdot \mathbf {F} ^{\top -1}]\cdot \mathrm {d} {\vec {A}}\\=&[\operatorname {Sp} (\mathbf {F} ^{-1}\cdot {\dot {\mathbf {F} }})\mathbf {1} -\mathbf {F} ^{\top -1}\cdot {\dot {\mathbf {F} }}^{\top }]\cdot \operatorname {det} (\mathbf {F} )\mathbf {F} ^{\top -1}\cdot \mathrm {d} {\vec {A}}=[\operatorname {Sp} ({\dot {\mathbf {F} }}\cdot \mathbf {F} ^{-1})\mathbf {1} -({\dot {\mathbf {F} }}\cdot \mathbf {F} ^{-1})^{\top }]\cdot \mathrm {d} {\vec {a}}\\=&[\operatorname {Sp} (\mathbf {l} )\mathbf {1} -\mathbf {l} ^{\top }]\cdot \mathrm {d} {\vec {a}}\,.\end{aligned}}}](/svg/5d6ad549f8fb7b24f06f85a7db769dbc24e64799.svg) Hier wurde die Konstanz des Einheitstensors benutzt: 
|
Wenn die Spur des räumlichen Geschwindigkeitsgradienten l oder – gleichbedeutend – des räumlichen Verzerrungsgeschwindigkeitstensors d oder die Divergenz des Geschwindigkeitsfeldes verschwindet, dann ist die Bewegung lokal volumenerhaltend. Bei einer Starrkörperbewegung ist, wie unten nachgewiesen, Sp(l)=Sp(w)=0, was die Konstanz des Volumens bei einer solchen Bewegung bestätigt. Eine positive Divergenz bedeutet Expansion, was namensgebend für die Divergenz ist (lateinisch divergere „auseinanderstreben“) und was in der Realität mit einer Abnahme der Dichte einher geht.
Dehn- und Schergeschwindigkeiten
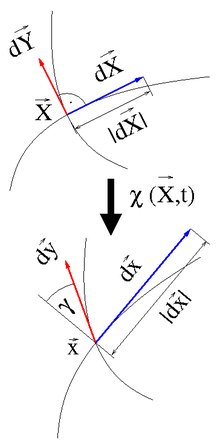
Bei der Verformung eines Körpers ändern sich in den deformierten Stellen die Abstände seiner Partikel und/oder die Winkel zwischen Verbindungslinien seiner Partikel. Mathematisch werden die Tangentenvektoren an solche Verbindungslinien betrachtet, siehe Abbildung rechts. Ändern diese Tangentenvektoren ihre Längen oder die Winkel untereinander, was im gleichen Maß geschieht wie die Verbindungslinien gedehnt oder geschert werden, dann ändern sich ihre Skalarprodukte und es liegen Deformationen vor. Die Änderungsrate dieser Skalarprodukte bemisst der räumliche Verzerrungsgeschwindigkeitstensor d:

Die Dehnungsgeschwindigkeit in
einer bestimmten Richtung  berechnet sich aus[F
2]:
berechnet sich aus[F
2]:

wo die Geschwindigkeit v und die Koordinate x in  -Richtung
zählen. Die Schergeschwindigkeit
ergibt sich im Zustand
-Richtung
zählen. Die Schergeschwindigkeit
ergibt sich im Zustand  aus
aus

Hier zählen die Geschwindigkeit  sowie die Koordinate x in
sowie die Koordinate x in  -Richtung
und die Geschwindigkeit
-Richtung
und die Geschwindigkeit  sowie die Koordinate y in
sowie die Koordinate y in  -Richtung.
-Richtung.
Der Verzerrungsgeschwindigkeitstensor d legt also die Dehn- und Scherraten in der Momentankonfiguration fest.
Eigenvektoren
Sind die im vorigen Abschnitt betrachteten Tangentenvektoren Eigenvektoren des Geschwindigkeitsgradienten oder des Verzerrungsgeschwindigkeitstensors, dann hat das bemerkenswerte Konsequenzen. Für einen solchen Eigenvektor des Geschwindigkeitsgradienten gilt:

Der Faktor  ist der zum Eigenvektor
gehörende Eigenwert. Die Frobeniusnorm
der Eigenvektoren ist unbestimmt, weswegen ihr Betrag hier auf eins festgelegt
wird, was im Hut
über dem e zum Ausdruck kommt. Die Zeitableitung eines Tangentenvektors
der Länge eins in der Momentankonfiguration liefert
ist der zum Eigenvektor
gehörende Eigenwert. Die Frobeniusnorm
der Eigenvektoren ist unbestimmt, weswegen ihr Betrag hier auf eins festgelegt
wird, was im Hut
über dem e zum Ausdruck kommt. Die Zeitableitung eines Tangentenvektors
der Länge eins in der Momentankonfiguration liefert

In Richtung der Eigenvektoren des räumlichen Geschwindigkeitsgradienten verschwindet diese Rate[F 3]. Einsetzen des Verzerrungsgeschwindigkeitstensors und des Wirbeltensors ergibt weiterhin[F 2]:

Sei
Eigenvektor von d. Dann ist  und daher lautet die Zeitableitung
und daher lautet die Zeitableitung

In Kombination mit dem obigen Ergebnis

zeigt sich für Eigenvektoren von d:

Die polare Zerlegung des Deformationsgradienten in eine Drehung und eine rotationsfreie Streckung entspricht beim räumlichen Geschwindigkeitsgradient der additiven Zerlegung in die Dehnrate und Drehgeschwindigkeit.
Kinematik
Substantielle Beschleunigung
Das zweite Newton’sche
Gesetz besagt, dass eine Kraft
einen materiellen Körper in Richtung der Kraft beschleunigt.
Auf lokaler Ebene werden dann die materiellen Punkte von einem von außen
aufgeprägten Beschleunigungsvektor  angetrieben:
angetrieben:

Weil aber in der klassischen Mechanik ein Raumpunkt nicht beschleunigt werden kann, sondern nur ein materieller Punkt, muss auf der linken Seite der Gleichung die materielle Zeitableitung der Geschwindigkeit gebildet werden, die – wie üblich – mit einem aufgesetzten Punkt notiert wird[F 1]:

Darin gehört der festgehaltene Vektor
zu dem beschleunigten Partikel, das sich zur Zeit
am Ort
aufhält und
ist dessen Geschwindigkeit zur Zeit t. Der letzte Term in obiger Gleichung ist
ein konvektiver Anteil, der die
kinematische Nichtlinearität der Impulsbilanz in der Euler’schen
Betrachtungsweise bewirkt.
Im geometrisch linearen Fall fällt der quadratische konvektive Anteil weg und es gilt:

Starrkörperbewegung
Jede Starrkörperbewegung
lässt sich in eine Translation und eine Rotation zerlegen. Als Drehzentrum
eignet sich jeder ruhende oder bewegte Punkt und auch der Schwerpunkt des
Körpers, siehe Abbildung rechts. Sei  der zeitlich fixierte Differenzvektor zwischen einem Partikel
des starren Körpers und seinem Schwerpunkt
der zeitlich fixierte Differenzvektor zwischen einem Partikel
des starren Körpers und seinem Schwerpunkt  zu einem Zeitpunkt
zu einem Zeitpunkt  .
Die Translation des Körpers kann dann mit seiner Schwerpunktsbewegung
.
Die Translation des Körpers kann dann mit seiner Schwerpunktsbewegung  (mit
(mit  )
und seine Drehung mit einem von der Zeit aber nicht vom Ort abhängigen orthogonalen Tensor
)
und seine Drehung mit einem von der Zeit aber nicht vom Ort abhängigen orthogonalen Tensor
 (mit
(mit  )
dargestellt werden. Translation und Rotation zusammengenommen definieren die
Bewegungsfunktion und das materielle Geschwindigkeitsfeld:
)
dargestellt werden. Translation und Rotation zusammengenommen definieren die
Bewegungsfunktion und das materielle Geschwindigkeitsfeld:

Im materiellen Geschwindigkeitsgradient taucht die gleichförmige
Schwerpunktsgeschwindigkeit nicht mehr auf. Das räumliche Geschwindigkeitsfeld
entsteht durch die Ersetzung  im materiellen Geschwindigkeitsfeld:
im materiellen Geschwindigkeitsfeld:

woraus der ebenfalls vom Ort und der gleichförmigen
Schwerpunktsgeschwindigkeit unabhängige räumliche Geschwindigkeitsgradient  folgt. Der räumliche Geschwindigkeitsgradient ist hier schiefsymmetrisch
folgt. Der räumliche Geschwindigkeitsgradient ist hier schiefsymmetrisch

und daher identisch zu seinem Wirbeltensor (l=w) was bestätigt, dass der symmetrische Verzerrungsgeschwindigkeitstensor d bei Starrkörperbewegungen verschwindet. Der axiale duale Wirbelvektor des Wirbeltensors wird in das Geschwindigkeitsfeld eingesetzt

das nun keinen sichtbaren Tensor mehr enthält. Nur im Kreuzprodukt, das einer Tensortransformation entspricht, verbirgt sich noch ein Hinweis auf den Wirbeltensor.
Die Drehachse  ist ein Eigenvektor des Geschwindigkeitsgradienten (mit Eigenwert null),
weswegen ihre Zeitableitung
ist ein Eigenvektor des Geschwindigkeitsgradienten (mit Eigenwert null),
weswegen ihre Zeitableitung  zu jeder Zeit verschwindet (siehe oben), was sich auch dadurch bemerkbar macht,
dass alle Punkte, deren Distanz sich in Vielfachen des
Drehgeschwindigkeitsvektors bemisst, dieselbe Geschwindigkeit aufweisen:
zu jeder Zeit verschwindet (siehe oben), was sich auch dadurch bemerkbar macht,
dass alle Punkte, deren Distanz sich in Vielfachen des
Drehgeschwindigkeitsvektors bemisst, dieselbe Geschwindigkeit aufweisen:  für alle
für alle  .
Wäre die Drehachse mit diesen Partikeln verknüpft, dürfte sie sich höchstens
parallel verschieben aber nicht neigen, so wie es
.
Wäre die Drehachse mit diesen Partikeln verknüpft, dürfte sie sich höchstens
parallel verschieben aber nicht neigen, so wie es  glauben macht. Als geometrisches Objekt ist der Parameter der Bewegung
„Drehachse“, der sich aus dem vorgegebenen orthogonalen Tensor Q
ableitet, aber an keine Partikel gebunden und kann ja sogar außerhalb des
Starrkörpers liegen. An die Winkelbeschleunigung
glauben macht. Als geometrisches Objekt ist der Parameter der Bewegung
„Drehachse“, der sich aus dem vorgegebenen orthogonalen Tensor Q
ableitet, aber an keine Partikel gebunden und kann ja sogar außerhalb des
Starrkörpers liegen. An die Winkelbeschleunigung
 resultiert an dieser Stelle mithin keinerlei Einschränkung.[F
4]
resultiert an dieser Stelle mithin keinerlei Einschränkung.[F
4]
Aus der lokalen Zeitableitung des Geschwindigkeitsfeldes (bei
festgehaltenem Raumpunkt )
geht
![\begin{align}
\frac{\partial}{\partial t}\vec{v}(\vec{x},t)
=&\ddot{\vec{s}}(t)
+\dot{\vec{\omega}}(t)\times \bigl(\vec{x}-\vec{s}(t)\bigr)
-\vec{\omega}(t)\times\dot{\vec{s}}(t)
\\[1ex]
=&
\ddot{\vec{s}}(t)
+\dot{\vec{\omega}}(t)\times \bigl(\vec{x}-\vec{s}(t)\bigr)
-\vec{\omega}(t)\times\left[\vec{v}(\vec{x},t)-\vec{\omega}(t)\times \bigl(\vec{x}-\vec{s}(t)\bigr)\right]\,,
\end{align}](/svg/f2f128a48848d7441ba52ae26ce31249d00c8a75.svg)
hervor was zusammen mit der materiellen Zeitableitung des Geschwindigkeitsfeldes

im Beschleunigungsfeld  (für englisch acceleration „Beschleunigung“)
einer Starrkörperbewegung mündet:
(für englisch acceleration „Beschleunigung“)
einer Starrkörperbewegung mündet:
![{\vec {a}}({\vec {x}},t):={\dot {{\vec {v}}}}({\vec {x}},t)={\ddot {{\vec {s}}}}(t)+{\dot {{\vec {\omega }}}}(t)\times {\bigl (}{\vec {x}}-{\vec {s}}(t){\bigr )}+{\vec {\omega }}(t)\times \left[{\vec {\omega }}(t)\times {\bigl (}{\vec {x}}-{\vec {s}}(t){\bigr )}\right]\,.](/svg/87f1349770bdc2e8a206dba00fbcbb21e55630dc.svg)
Diese Herleitung beleuchtet die lokale und materielle Zeitableitung und ihre Ausprägung bei einer Starrkörperbewegung.
Potentialwirbel
Der Potentialwirbel oder freie Wirbel ist ein klassisches Beispiel einer rotationsfreien Potentialströmung, siehe Bild rechts. Große Wirbel in Fluiden mit niedriger Viskosität werden mit diesem Modell gut beschrieben. Beispiele für einen Potentialwirbel sind der Badewannenablauf fern des Ausflusses, aber auch in guter Näherung ein Tornado. Das Geschwindigkeitsfeld des Potentialwirbels ist in Zylinderkoordinaten mit dem Abstand ρ vom Wirbelzentrum gegeben durch:

Der Parameter  kontrolliert die Strömungsgeschwindigkeit und es ergibt sich der
Geschwindigkeitsgradient
kontrolliert die Strömungsgeschwindigkeit und es ergibt sich der
Geschwindigkeitsgradient

Die Drehgeschwindigkeit der Fluidelemente um sich selbst verschwindet wegen
w=0 und infolge von  ist die Bewegung volumenerhaltend. Bei Annäherung an das Wirbelzentrum wächst
die Schergeschwindigkeit aufgrund von
ist die Bewegung volumenerhaltend. Bei Annäherung an das Wirbelzentrum wächst
die Schergeschwindigkeit aufgrund von

über alle Grenzen, was in realen Strömungen nicht auftreten kann, weil die immer vorhandene aber hier vernachlässigte Viskosität das wie im Hamel-Oseen’schen Wirbel verhindert.
Wechsel des Bezugssystems
Zwei Beobachter, die die Deformation eines Körpers analysieren, können sich
über das Bewegungs- und Geschwindigkeitsfeld des Körpers austauschen. Beide
Beobachter werden über den Deformationsgradient Einigkeit erzielen, denn er ist
eine objektive Größe. Genauso wie der Insasse eines fahrenden Zuges die
Geschwindigkeit eines vorbei fliegenden Vogels anders beurteilt wie ein in der
Nähe befindlicher Fußgänger, werden verschieden bewegte Beobachter – wie
eingangs erwähnt – unterschiedliche Geschwindigkeitsfelder und
Geschwindigkeitsgradienten messen. Das Geschwindigkeitsfeld und der
Geschwindigkeitsgradient sind nicht objektiv. Für den Nachweis der
Objektivität – oder des Gegenteils – ist die Drehbewegung des Bezugssystems des
Beobachters ausschlaggebend. Die Drehung des bewegten Beobachters relativ zum
materiellen Körper wird mit einem orthogonalen
Tensor  aus der speziellen
orthogonalen Gruppe
aus der speziellen
orthogonalen Gruppe

beschrieben. Die Menge  enthält alle Tensoren (zweiter Stufe),
enthält alle Tensoren (zweiter Stufe),  bezeichnet die Transposition,
bezeichnet die Transposition,
 die Inverse
und „det“ die Determinante.
Die Tensoren aus dieser Gruppe führen Drehungen ohne Spiegelung aus und werden
als „eigentlich orthogonal“ bezeichnet.
die Inverse
und „det“ die Determinante.
Die Tensoren aus dieser Gruppe führen Drehungen ohne Spiegelung aus und werden
als „eigentlich orthogonal“ bezeichnet.
Es gibt drei Arten objektiver Tensoren, die sich auf unterschiedliche Weise bei einer Euklidischen Transformation verhalten:
| Körperbezogen objektive, materielle, ein-Feld Tensoren | 
|
für alle 
|
| Objektive, räumliche, ein-Feld Tensoren | 
| |
| Objektive zwei-Feld Tensoren wie der Deformationsgradient | 
|
Stellt der relativ zum Körper ruhende Beobachter in einem materiellen Punkt
den Deformationsgradienten  fest, so misst der bewegte Beobachter durch die euklidische Transformation
fest, so misst der bewegte Beobachter durch die euklidische Transformation

Der materielle Geschwindigkeitsgradient
ist also nicht objektiv. Es kann weiter der räumliche Geschwindigkeitsgradient
des bewegten Beobachters berechnet werden

der somit ebenfalls nicht objektiv ist. Der letzte Term in der letzten Gleichung ist wegen

schiefsymmetrisch und hebt sich beim symmetrischen Verzerrungsgeschwindigkeitstensor auf:

Der Verzerrungsgeschwindigkeitstensor ist also objektiv, denn er
transformiert sich wie ein objektiver, räumlicher, ein-Feld Tensor. Aus der
Differenz  ergibt sich, dass der Wirbeltensor wieder nicht objektiv ist:
ergibt sich, dass der Wirbeltensor wieder nicht objektiv ist:

Objektive Zeitableitungen
Für die Formulierung ratenabhängiger Materialmodelle werden in der räumlichen Betrachtungsweise objektive Zeitableitungen für konstitutive Variablen benötigt, denn es entspricht nicht der Erfahrung, dass ein bewegter Beobachter ein anderes Materialverhalten misst als ein ruhender. Somit müssen die Materialmodelle mit objektiven Zeitableitungen formuliert werden. So wie die Geschwindigkeit und ihr Gradient nicht objektiv sind – siehe die #Beschreibung oben – sind auch die Zeitableitungen anderer vom Fluid transponierter Größen nicht objektiv. Es existieren jedoch mehrere bezugssysteminvariante Raten, die für objektive Größen ebenfalls objektiv sind und mit Hilfe vom Geschwindigkeitsgradienten formuliert werden, unter anderem[F 5]:
Zaremba-Jaumann
Ableitung: 
Kovariante
Oldroyd Ableitung: 
Kontravariante
Oldroyd Ableitung: 
Cauchy-Ableitung:[F
6] 
Für einen objektiven Vektor
sind die Zeitableitungen

objektiv. Mehr dazu ist im Hauptartikel nachzuschlagen.
Beispiel
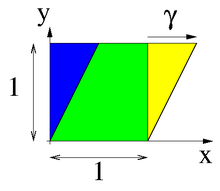
Ein Einheitsquadrat aus einer viskoelastischen Flüssigkeit wird mit konstanter Schergeschwindigkeit zu einem Parallelogramm verformt, siehe Abbildung rechts. Die Referenzkonfiguration ist das Einheitsquadrat
![{\begin{pmatrix}X\\Y\end{pmatrix}}\in [0,1]^{2}](/svg/7c0823e62e43e7cf77d11f915c4991738f4a212d.svg)
In der Momentankonfiguration haben die Punkte des Quadrates die räumlichen Koordinaten

woraus sich der Deformations- und (räumliche) Geschwindigkeitsgradient berechnen:

Eine Verallgemeinerung des Materialgesetzes für eine viskoelastische
Flüssigkeit (Maxwell-Körper)  mit Materialparametern
mit Materialparametern  auf drei Dimensionen könnte so aussehen:
auf drei Dimensionen könnte so aussehen:

Der Cauchy’sche Spannungstensor
 ist hier deviatorisch und besitzt daher
die Form
ist hier deviatorisch und besitzt daher
die Form

So berechnet sich die Zaremba-Jaumann Ableitung zu:

was über das Materialgesetz auf zwei Differentialgleichungen für die Spannungskomponenten führt:

Bei konstanter Schergeschwindigkeit kommt nach Eliminierung der Normalspannung die Differentialgleichung

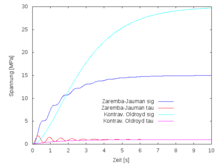
für die Schubspannung heraus, die als Lösung eine gedämpfte Schwingung besitzt. Dies ist ein bei Verwendung der Zaremba-Jaumann Rate bekanntes unphysikalisches Phänomen, siehe Abbildung rechts.
Verwendung der kontravarianten Oldroyd Ableitung liefert einen nicht-deviatorischen Spannungstensor:

Die Materialgleichung  ergibt:
ergibt:

was sich bei anfänglich verschwindenden Spannungen und konstanter Scherrate geschlossen integrieren lässt:

Hier treten keine Schwingungen auf. Die Abbildung rechts zeigt die bei einer
Scherrate  10/s
mit der Zaremba-Jaumann und der kontravarianten Oldroyd Ableitung und den in der
Tabelle angegebenen Materialparametern berechneten Spannungen.
10/s
mit der Zaremba-Jaumann und der kontravarianten Oldroyd Ableitung und den in der
Tabelle angegebenen Materialparametern berechneten Spannungen.
| Parameter | Relaxationszeit | dynamische Viskosität |
|---|---|---|
| Formelzeichen | |

|
| Einheit | s | MPa s |
| Zaremba-Jaumann Ableitung | 1,5 | 45,2 |
| Kontravariante Oldroyd Ableitung | 1,5 | 0,2 |
Anmerkungen
- ↑ a
b
c
Die Fréchet-Ableitung
einer Funktion
 nach
nach  ist der beschränkte lineare Operator
ist der beschränkte lineare Operator  der – sofern er existiert – in alle Richtungen
der – sofern er existiert – in alle Richtungen  dem Gâteaux-Differential
entspricht, also
dem Gâteaux-Differential
entspricht, also
 skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch
skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch
- ↑ a
b
Denn mit dem Wirbelvektor ergibt sich

- ↑
Denn aus

folgt:
- ↑ Dieses Paradoxon tritt nur bei nicht materiellen Objekten wie der Drehachse hier oder dem Momentanpol auf.
- ↑
Die Formelzeichen für die objektiven Raten
variieren von Quelle zu Quelle. Die hier angegebenen folgen P. Haupt, S. 48ff.
In H. Altenbach wird
 für
für  und
und  für
für  benutzt.
benutzt. - ↑ Diese Ableitung kommt in der Cauchy-Elastizität vor und wird auch nach C. Truesdell benannt. Er selbst benannte die Ableitung aber nach Cauchy und schrieb 1963, dass diese Rate ohne erfindlichen Grund nach ihm benannt wurde ( „came to be named, for no good reason, after […] me“ ) siehe C. Truesdell: Remarks on Hypo-Elasticity, Journal of Research of the National Bureau of Standards - B. Mathematics and Mathematical Physics, Vol. 67B, No. 3, July-September 1963, S. 141.


Siehe auch
Literatur
- H. Altenbach: Kontinuumsmechanik. Springer, 2012, ISBN 978-3-642-24118-5.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.04. 2021