Deviator
 durch einen Tensor
durch einen Tensor  .
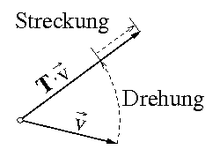
.Deviatoren oder deviatorische Tensoren (lateinisch Abweichler) sind in der Kontinuumsmechanik Tensoren zweiter Stufe, deren Spur verschwindet. Tensoren zweiter Stufe werden hier als lineare Abbildungen von geometrischen Vektoren auf geometrische Vektoren benutzt, die im Allgemeinen dabei gedreht und gestreckt werden, siehe Abbildung rechts.
Von besonderer Bedeutung sind die Verzerrungstensoren, die die Dehnung, Stauchung und Scherung von materiellen Linien und Flächen in einem Körper bei einer Deformation beschreiben. Die Verzerrungstensoren besitzen eine "Spur" genannte Kennziffer (Hauptinvariante), die ein Maß für die Volumendehnung am Ort ihres Auftretens ist und zwar in der Art, dass sie verschwindet, wenn keine Volumendehnung vorliegt. Der spurfreie Anteil des Verzerrungstensors, sein Deviator, beschreibt also den volumenerhaltenden, gestaltändernden Anteil der Deformation eines Körpers.
Ein anderes Anwendungsgebiet von Deviatoren liegt in der Plastizitätstheorie. Bei vielen Metallen beobachtet man, dass sie unter allseitigem, hydrostatischem Druck nicht plastisch fließen oder, anders ausgedrückt, das plastische Fließen nur von den vom hydrostatischen Anteil befreiten Spannungen getrieben wird. Der deviatorische Anteil eines Tensors ist gerade der Teil, der übrig bleibt, wenn sein hydrostatischer Anteil abgezogen wird.
Mit Deviatoren kann also das Materialverhalten unter volumenerhaltenden, gestaltändernden Bedingungen modelliert werden.
Definition
Deviatoren sind Tensoren zweiter Stufe ,
deren Spur "Sp" verschwindet:
 .
.
Der deviatorische Anteil wird mit einem hochgestellten "D" oder "dev" bezeichnet:
 .
.
Die Spur des Einheitstensors
 ist gleich der Dimension des zugrunde gelegten Raumes, hier und im Folgenden
gleich drei.
ist gleich der Dimension des zugrunde gelegten Raumes, hier und im Folgenden
gleich drei.
Der Subtrahend

ist der Kugelanteil
des Tensors .
Deviatoren und Volumendehnung
Bei der Streckung eines Körpers der Länge  auf die Länge
auf die Länge  ist die Dehnung
ist die Dehnung  als das Längenverhältnis
als das Längenverhältnis
 .
.
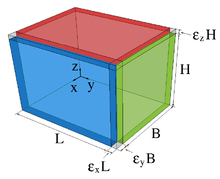
definiert. Bei der Verformung eines Quaders der Länge ,
Breite  und Höhe
und Höhe  in x-, y- und z-Richtung (und daher Volumen
in x-, y- und z-Richtung (und daher Volumen  )
ergeben sich analog Dehnungen
)
ergeben sich analog Dehnungen  und
und  in x-, y- und z-Richtung, siehe Abbildung rechts. Das Volumen des Quaders nach
der Deformation berechnet sich dann aus
in x-, y- und z-Richtung, siehe Abbildung rechts. Das Volumen des Quaders nach
der Deformation berechnet sich dann aus

Das Landau-Symbol
 steht für Terme, die mindestens quadratisch in den Dehnungen sind und die bei
kleinen Dehnungen vernachlässigt werden können. Die Summe der Dehnungen in x-,
y- und z-Richtung ist die Spur
steht für Terme, die mindestens quadratisch in den Dehnungen sind und die bei
kleinen Dehnungen vernachlässigt werden können. Die Summe der Dehnungen in x-,
y- und z-Richtung ist die Spur  des linearisierten Verzerrungstensors
des linearisierten Verzerrungstensors

und deshalb ergibt sich aus  die Volumendehnung:
die Volumendehnung:
 .
.
Bei großen Verformungen findet sich der Zusammenhang

zwischen dem natürlichen Logarithmus des Volumenverhältnisses und der Spur des Henky Verzerrungstensors.
Wenn die Spuren der Verzerrungstensoren  oder
oder  bei kleinen bzw. großen Verformungen verschwinden, sie deviatorisch sind,
liegt also keine Volumendehnung am Ort ihres Auftretens vor. Umgekehrt
beschreiben die Deviatoren dieser Verzerrungstensoren den volumenerhaltenden,
gestaltändernden Teil der Deformation und können somit für die Modellierung des
Materialverhaltens unter diesen Bedingungen eingesetzt werden.
bei kleinen bzw. großen Verformungen verschwinden, sie deviatorisch sind,
liegt also keine Volumendehnung am Ort ihres Auftretens vor. Umgekehrt
beschreiben die Deviatoren dieser Verzerrungstensoren den volumenerhaltenden,
gestaltändernden Teil der Deformation und können somit für die Modellierung des
Materialverhaltens unter diesen Bedingungen eingesetzt werden.
Flächen im Eigenwertraum
Betrachtet werden symmetrische
Tensoren zweiter Stufe. Diese haben drei reelle Eigenwerte  und stellen im Eigenwertraum (der Raum, in dem die Eigenwerte auf den drei
Koordinatenachsen aufgetragen werden) einen Punkt dar.
und stellen im Eigenwertraum (der Raum, in dem die Eigenwerte auf den drei
Koordinatenachsen aufgetragen werden) einen Punkt dar.
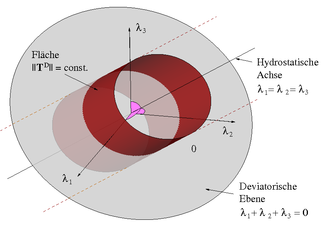
Mit der Gleichung
wird mit einem Flächenparameter  eine Fläche
in diesem drei-dimensionalen Eigenwertraum definiert, siehe Abbildung rechts.
Diese Fläche hat die Form eines (unendlich langen) Zylinders, der Parallel zur
hydrostatischen Achse
eine Fläche
in diesem drei-dimensionalen Eigenwertraum definiert, siehe Abbildung rechts.
Diese Fläche hat die Form eines (unendlich langen) Zylinders, der Parallel zur
hydrostatischen Achse

ausgerichtet ist. Wegen

liegen alle Deviatoren in der deviatorischen Ebene
 ,
,
deren Normale
die hydrostatische Achse ist. Die Normalen  an die Fläche
an die Fläche  liegen in Ebenen, die zur deviatorischen Ebene parallel sind, weswegen die
Normalen ebenfalls deviatorisch sind. Das berechnet sich auch aus der
Ableitung[1]
liegen in Ebenen, die zur deviatorischen Ebene parallel sind, weswegen die
Normalen ebenfalls deviatorisch sind. Das berechnet sich auch aus der
Ableitung[1]
 ,
,
weil die Normalen genau dieser Ableitung entsprechen.
Eine Fläche diesen Typs ist die Fließortfläche in der J2-Plastizitätstheorie[2]
 .
.
Der Flächenparameter  ist die isotrope Verfestigung,
ist die isotrope Verfestigung,  der (symmetrische) Spannungstensor
und
der (symmetrische) Spannungstensor
und  die von Mises Vergleichsspannung.
Im einachsigen Fall
die von Mises Vergleichsspannung.
Im einachsigen Fall  ist
ist

und
modelliert die Fließspannung.
Die hydrostatische Achse wird vom Einheitstensor und den Kugeltensoren gebildet.
Deviatorische Rate
Eine kleine Deformation, bei der die Rate des linearisierten Verzerrungstensors
deviatorisch ist, ist volumenerhaltend, weil seine Spur ein Maß für die
Kompression am Ort seines Auftretens ist. Dies gilt auch bei großen
Deformationen, wenn die kovariante
Oldroyd Ableitung des Euler-Almansi
Verzerrungstensors

deviatorisch ist. Diese Deformation ist volumenerhaltend, denn wegen

verschwindet die Zeitableitung der Determinante
"det" des Deformationsgradienten
 .
Die Determinante des Deformationsgradienten ist gleich der Volumendehnung, die
in diesem Fall zeitlich konstant ist.
.
Die Determinante des Deformationsgradienten ist gleich der Volumendehnung, die
in diesem Fall zeitlich konstant ist.
Dies bewirkt in der J2-Plastizität[2], in der die Rate der plastischen Dehnungen deviatorisch ist und die plastischen Dehnungen vom Euler-Almansi-Typ sind, dass die plastischen Dehnungen volumenerhaltend sind, was mit plastischer Inkompressibilität bezeichnet wird.
Invarianten von Deviatoren
Die drei Hauptinvarianten
 eines Deviators lauten
eines Deviators lauten
![{\displaystyle {\begin{array}{rclcl}\mathrm {I} _{1}(\mathbf {T} ^{\mathrm {D} })&=&\mathrm {Sp} (\mathbf {T} ^{\mathrm {D} })&=&0\\\mathrm {I} _{2}(\mathbf {T} ^{\mathrm {D} })&=&{\dfrac {1}{2}}[\mathrm {Sp} {(\mathbf {T} ^{\mathrm {D} })}^{2}-\mathrm {Sp} (\mathbf {T} ^{\mathrm {D} }\cdot \mathbf {T} ^{\mathrm {D} })]&=&-{\dfrac {1}{2}}\mathrm {Sp} (\mathbf {T} ^{\mathrm {D} }\cdot \mathbf {T} ^{\mathrm {D} })\\\mathrm {I} _{3}(\mathbf {T} ^{\mathrm {D} })&=&\operatorname {det} (\mathbf {T} ^{\mathrm {D} })&=&{\dfrac {1}{3}}\operatorname {Sp} (\mathbf {T} ^{\mathrm {D} }\cdot \mathbf {T} ^{\mathrm {D} }\cdot \mathbf {T} ^{\mathrm {D} })\end{array}}}](/svg/a9c496c543d00646feb14a5b947808ccd01529a5.svg) .
.
Der Operator  gibt die Determinante
seines Argumentes. Der Betrag oder Frobeniusnorm
eines Deviators berechnet sich mit
dem Frobenius-Skalarprodukt
":" zu
gibt die Determinante
seines Argumentes. Der Betrag oder Frobeniusnorm
eines Deviators berechnet sich mit
dem Frobenius-Skalarprodukt
":" zu
 ,
,
woraus

folgt. Drei Strecken mit den Längen der Beträge eines Tensors, seines Deviators und seines Kugelanteils bilden also ein rechtwinkliges Dreieck.
Bei einem symmetrischen Tensor  ist auch dessen Deviator symmetrisch und für dessen Frobeniusnorm ergibt
sich:
ist auch dessen Deviator symmetrisch und für dessen Frobeniusnorm ergibt
sich:
 .
.
Wenn der Tensor die Darstellung

mit Komponenten  bezüglich der Standardbasis
bezüglich der Standardbasis
 des euklidischen
Vektorraums
des euklidischen
Vektorraums  besitzt, dann berechnen sich
besitzt, dann berechnen sich
![{\displaystyle {\begin{array}{lcl}\mathbf {T} ^{\mathrm {D} }&=&{\begin{pmatrix}{\frac {2}{3}}T_{11}-{\frac {1}{3}}T_{22}-{\frac {1}{3}}T_{33}&T_{12}&T_{13}\\T_{21}&{\frac {2}{3}}T_{22}-{\frac {1}{3}}T_{11}-{\frac {1}{3}}T_{33}&T_{23}\\T_{31}&T_{32}&{\frac {2}{3}}T_{33}-{\frac {1}{3}}T_{11}-{\frac {1}{3}}T_{22}\end{pmatrix}}\\\mathrm {I} _{2}(\mathbf {T} ^{\mathrm {D} })&=&{\dfrac {1}{3}}(T_{11}T_{22}+T_{11}T_{33}+T_{22}T_{33}-T_{11}^{2}-T_{22}^{2}-T_{33}^{2})-T_{12}T_{21}-T_{13}T_{31}-T_{23}T_{32}\\\operatorname {det} (\mathbf {T} ^{\mathrm {D} })&=&{\dfrac {1}{27}}[12T_{11}T_{22}T_{33}+2(T_{11}^{3}+T_{22}^{3}+T_{33}^{3})-3T_{11}^{2}(T_{22}+T_{33})-3T_{22}^{2}(T_{11}+T_{33})-3T_{33}^{2}(T_{11}+T_{22})]\\&&-{\dfrac {1}{3}}[(2T_{11}-T_{22}-T_{33})T_{23}T_{32}+(2T_{33}-T_{11}-T_{22})T_{12}T_{21}+(2T_{22}-T_{11}-T_{33})T_{13}T_{31}]\\&&+T_{13}T_{32}T_{21}+T_{12}T_{23}T_{31}\\\parallel \mathbf {T} ^{\mathrm {D} }\parallel &=&{\sqrt {{\dfrac {2}{3}}(T_{11}^{2}+T_{22}^{2}+T_{33}^{2}-T_{11}T_{22}-T_{11}T_{33}-T_{22}T_{33})+T_{12}^{2}+T_{21}^{2}+T_{13}^{2}+T_{31}^{2}+T_{23}^{2}+T_{32}^{2}}}\end{array}}}](/svg/8f6aaec180056e8777be5b03ef4a45c080227a41.svg)
Siehe auch
Fußnoten
- ↑
Die Fréchet-Ableitung
einer skalaren Funktion
 nach einem Tensor
ist der Tensor
nach einem Tensor
ist der Tensor  für den - sofern er existiert - gilt:
für den - sofern er existiert - gilt:
 und ":" das Frobenius-Skalarprodukt.
Dann wird auch
und ":" das Frobenius-Skalarprodukt.
Dann wird auch
- ↑ a
b
Die zweite Hauptinvariante des Spannungsdeviators
wird häufig mit J2 bezeichnet:






© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 20.08. 2023