Deformationsgradient
Der Deformationsgradient (Formelzeichen:  )
ist in der Kontinuumsmechanik
ein Mittel zur Beschreibung der lokalen Verformung an einem materiellen Punkt
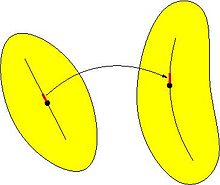
eines Körpers. Zur Veranschaulichung kann man sich einen Körper (in Abbildung 1,
gelb) vorstellen auf den eine kurze Linie (weil nur lokale Änderungen
beschrieben werden, im Bild fett rot) eingeritzt wird. Wird der Körper
deformiert (rechts im Bild), wird die eingeritzte Linie nicht nur ihre Lage im
Raum ändern, sondern auch gedehnt (oder gestaucht) und verdreht werden. Die
Dehnung und Verdrehung beschreibt der Deformationsgradient und ist so ein Maß
für die Deformation, daher der Name. Der Anhang Gradient verweist
auf die Tatsache, dass lokale Änderungen beschrieben werden. Aus dem
Deformationsgradient lassen sich Maße für die lokale Streckung, Verzerrung,
Flächen- und Volumenänderung ableiten. Im allgemeinen Fall ist der
Deformationsgradient sowohl vom Ort als auch von der Zeit abhängig. Die
zeitliche Änderung des Deformationsgradienten gibt Maße für die Änderungsraten
der Streckung, Verdrehung, Verzerrung, Flächen- und Volumenänderung. Der
Deformationsgradient ist einheitenfrei.
)
ist in der Kontinuumsmechanik
ein Mittel zur Beschreibung der lokalen Verformung an einem materiellen Punkt
eines Körpers. Zur Veranschaulichung kann man sich einen Körper (in Abbildung 1,
gelb) vorstellen auf den eine kurze Linie (weil nur lokale Änderungen
beschrieben werden, im Bild fett rot) eingeritzt wird. Wird der Körper
deformiert (rechts im Bild), wird die eingeritzte Linie nicht nur ihre Lage im
Raum ändern, sondern auch gedehnt (oder gestaucht) und verdreht werden. Die
Dehnung und Verdrehung beschreibt der Deformationsgradient und ist so ein Maß
für die Deformation, daher der Name. Der Anhang Gradient verweist
auf die Tatsache, dass lokale Änderungen beschrieben werden. Aus dem
Deformationsgradient lassen sich Maße für die lokale Streckung, Verzerrung,
Flächen- und Volumenänderung ableiten. Im allgemeinen Fall ist der
Deformationsgradient sowohl vom Ort als auch von der Zeit abhängig. Die
zeitliche Änderung des Deformationsgradienten gibt Maße für die Änderungsraten
der Streckung, Verdrehung, Verzerrung, Flächen- und Volumenänderung. Der
Deformationsgradient ist einheitenfrei.
 durch einen Tensor
durch einen Tensor  .
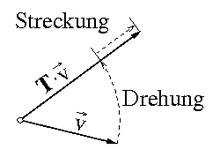
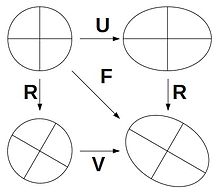
.Bei den angesprochenen kurzen Linien handelt es sich mathematisch um Vektoren, die vom Deformationsgradient transformiert werden, wobei die Vektoren im Allgemeinen gedreht und gestreckt werden. Abbildungen von Vektoren leisten Tensoren, siehe Abbildung 2, weswegen der Deformationsgradient ein Tensor ist. Wenn es klar ist, auf welches Koordinatensystem sich der Deformationsgradient bezieht, berechnet er sich wie eine Jacobimatrix und kann dann auch als Matrix notiert werden. Oft bildet der Deformationsgradient die (infinitesimal kleinen) materiellen Linienelemente in der Ausgangs- oder Referenzkonfiguration in die aktuelle oder Momentankonfiguration ab. Ganz allgemein kann eine solche Abbildung aber auch zwischen beliebig anderen zu definierenden Konfigurationen stattfinden.
Definition und Darstellungsweisen
Definition
Die Bewegung eines materiellen Punktes wird mit der Bewegungsfunktion
beschrieben. Der Vektor  ist die aktuelle Position des materiellen Punktes
ist die aktuelle Position des materiellen Punktes  zur Zeit
zur Zeit  in der Momentankonfiguration. Genauer ist
die Position des betrachteten materiellen Punktes in der undeformierten
Ausgangs- oder Referenzkonfiguration des Körpers zu einer Zeit
in der Momentankonfiguration. Genauer ist
die Position des betrachteten materiellen Punktes in der undeformierten
Ausgangs- oder Referenzkonfiguration des Körpers zu einer Zeit  >.
Bei festgehaltenem materiellen Punkt
beschreibt die Bewegungsfunktion dessen Bahnlinie
durch den Raum. Im kartesischen Koordinatensystem mit der Standardbasis {
>.
Bei festgehaltenem materiellen Punkt
beschreibt die Bewegungsfunktion dessen Bahnlinie
durch den Raum. Im kartesischen Koordinatensystem mit der Standardbasis { }
hat der Punkt
die komponentenweise Darstellung
}
hat der Punkt
die komponentenweise Darstellung

und entsprechend gilt  .
Um zu untersuchen wie sich die aktuelle Position ändert, wenn die Position in
der undeformierten Ausgangslage variiert, wird die Ableitung gebildet:
.
Um zu untersuchen wie sich die aktuelle Position ändert, wenn die Position in
der undeformierten Ausgangslage variiert, wird die Ableitung gebildet:
 für
für  .
.
Die Funktionen  sind die Komponenten des Deformationsgradienten bezüglich des Basissystems
sind die Komponenten des Deformationsgradienten bezüglich des Basissystems  .
.
Um zu einer koordinatenfreien Darstellung zu gelangen, wird das dyadische Produkt
 benutzt:
benutzt:
 .
.
Darin ist
der Deformationsgradient und  ist der Operator für den materiellen Gradienten, denn
es wird nach den materiellen Koordinaten
ist der Operator für den materiellen Gradienten, denn
es wird nach den materiellen Koordinaten  differenziert.
differenziert.
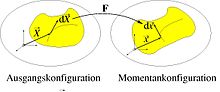
Der Deformationsgradient kann auch mit der Richtungsableitung

dargestellt werden, was seine Transformationseigenschaften der Linienelemente  verdeutlicht, siehe Abbildung 3.
verdeutlicht, siehe Abbildung 3.
Definitions- und Wertebereich
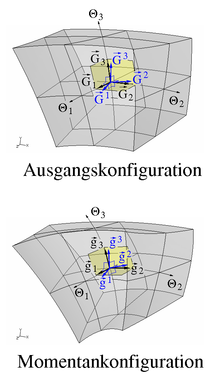
 spannen Tangentialräume auf (gelb). Die zu den Tangentenvektoren dualen
Gradientenvektoren sind blau dargestellt.
spannen Tangentialräume auf (gelb). Die zu den Tangentenvektoren dualen
Gradientenvektoren sind blau dargestellt.Mathematisch ist das Differential
in

Element des Tangentialraumes
 im Punkt
des Raumes
im Punkt
des Raumes  ,
den der undeformierte Körper in der Ausgangskonfiguration einnimmt (in Abbildung
4 oben). Das Differential
,
den der undeformierte Körper in der Ausgangskonfiguration einnimmt (in Abbildung
4 oben). Das Differential  ist entsprechend ein Element des Tangentialraumes
ist entsprechend ein Element des Tangentialraumes  im Punkt
des Raumes
im Punkt
des Raumes  ,
den der deformierte Körper in der Momentankonfiguration einnimmt (im Bild
unten). Damit wird der Deformationsgradient zur Abbildung
,
den der deformierte Körper in der Momentankonfiguration einnimmt (im Bild
unten). Damit wird der Deformationsgradient zur Abbildung
 .
.
Darstellung in konvektiven Koordinaten
Werden jedem materiellen Punkt
über eine Referenzkonfiguration konvektive
Koordinaten  zugeordnet, bilden die Tangentenvektoren
zugeordnet, bilden die Tangentenvektoren
 bzw.
bzw. 
kovariante Basen der Tangentialräume
im Punkt
bzw.  im Punkt
(in Abbildung 4 schwarz dargestellt). Die Gradienten der konvektiven Koordinaten
im Punkt
(in Abbildung 4 schwarz dargestellt). Die Gradienten der konvektiven Koordinaten
 bzw.
bzw. 
bilden kontravariante Basen, die zu den kovarianten dual sind (in Abbildung 4 blau dargestellt).
In diesen Basissystemen ausgedrückt bekommt der Deformationsgradient die besonders einfache Form
 .
.
In dieser Darstellung lässt sich auch sofort mit
 .
.
die Inverse des Deformationsgradienten angeben. Der transponiert inverse Deformationensgradient bildet die kontravarianten Basisvektoren aufeinander ab:
 .
.
Der räumliche Deformationsgradient
Zumeist wird der Deformationsgradient wie oben in seiner materiellen
Darstellung formuliert. Gelegentlich wird aber auch der räumliche
Deformationsgradient benutzt. Wegen  kann der Deformationsgradient invertiert und das Ergebnis über
kann der Deformationsgradient invertiert und das Ergebnis über  als Funktion der räumlichen Koordinaten
ausgedrückt werden:
als Funktion der räumlichen Koordinaten
ausgedrückt werden:
 .
.
Der räumliche Deformationsgradient  bildet dann das Linienelement
bildet dann das Linienelement  auf das Linienelement
ab:
auf das Linienelement
ab:
 .
.
Entsprechend hat der räumliche Deformationsgradient in konvektiven Koordinaten die Form
 .
.
Geometrische Linearisierung
In der Festkörpermechanik
treten in vielen Anwendungsbereichen nur kleine Deformationen auf. In diesem
Fall erfahren die Gleichungen der Kontinuumsmechanik eine erhebliche
Vereinfachung durch geometrische
Linearisierung. Dazu werden die Verschiebungen  betrachtet, die ein materieller Punkt
im Laufe seiner Bewegung erfährt. Weil
betrachtet, die ein materieller Punkt
im Laufe seiner Bewegung erfährt. Weil  die aktuelle Position des Punktes ist, der in der Ausgangskonfiguration die
Position
hatte, ist die Verschiebung die Differenz
die aktuelle Position des Punktes ist, der in der Ausgangskonfiguration die
Position
hatte, ist die Verschiebung die Differenz
 .
.
Der materielle Gradient der Verschiebungen ist der Tensor
 .
.
und wird Verschiebungsgradient genannt. Wenn  eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl
eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl  als auch
als auch  gefordert, so dass alle Terme, die höhere Potenzen von
gefordert, so dass alle Terme, die höhere Potenzen von  oder
oder  beinhalten vernachlässigt werden können. In diesem Fall ergeben sich die
folgenden Zusammenhänge:
beinhalten vernachlässigt werden können. In diesem Fall ergeben sich die
folgenden Zusammenhänge:
 .
.
Die Tensoren  und
und  kommen in der polaren Zerlegung vor, siehe unten.
kommen in der polaren Zerlegung vor, siehe unten.
Transformationseigenschaften
Polare Zerlegung
Der Deformationsgradient
lässt sich eindeutig "polar" in eine Rotation und eine reine Streckung zerlegen.
Durch Anwendung der Polarzerlegung
resultiert die Darstellung
 .
.
Dabei ist
ein "eigentlich
orthogonaler Tensor". Der materielle rechte Strecktensor
 und der räumliche linke Strecktensor
und der räumliche linke Strecktensor  sind symmetrisch
und positiv
definit. (Eselsbrücke:
steht rechts von
und
links davon in der polaren Darstellung.)
sind symmetrisch
und positiv
definit. (Eselsbrücke:
steht rechts von
und
links davon in der polaren Darstellung.)
Anschaulich bedeutet die polare Zerlegung eine Hintereinanderschaltung zweier
Transformationen: Im einen Fall eine rotationsfreie Streckung
mit anschließender Drehung
und im anderen Fall eine Drehung
mit anschließender rotationsfreier Streckung
so wie sie in Abbildung 5 dargestellt sind.
Der rechte Strecktensor berechnet sich gemäß

aus der Hauptachsentransformation von  ,
ziehen der Wurzel der Diagonalglieder und Rücktransformation, siehe auch das
Beispiel unten. Entsprechend gilt für den linken Strecktensor
,
ziehen der Wurzel der Diagonalglieder und Rücktransformation, siehe auch das
Beispiel unten. Entsprechend gilt für den linken Strecktensor
 .
.
Der Rotationstensor
ergibt sich dann aus
 .
.
Linien-, Flächen- und Volumenelemente
Mit Hilfe des Deformationsgradienten können Integrale in der materiellen
Darstellung in die räumliche umgerechnet werden. Die zu integrierende Größe sei
ein Feld  das skalar-, vektor- oder tensorwertig sein kann und in der materiellen
Darstellung
das skalar-, vektor- oder tensorwertig sein kann und in der materiellen
Darstellung  und der räumlichen
und der räumlichen

vorliege. Dann gelten die Identitäten:
 .
.
Der Operator  bildet die Determinante
und
bildet die Determinante
und  die transponiert
Inverse.
die transponiert
Inverse.  ist eine materielle Linie in der Ausgangskonfiguration und
ist eine materielle Linie in der Ausgangskonfiguration und  die zugehörige räumliche in der Momentankonfiguration. Die Oberfläche
die zugehörige räumliche in der Momentankonfiguration. Die Oberfläche  des Körpers in der Ausgangskonfiguration hat das Oberflächenelement
des Körpers in der Ausgangskonfiguration hat das Oberflächenelement
 ,
d.h. die mit dem Flächenstück
,
d.h. die mit dem Flächenstück  multiplizierte Normale
multiplizierte Normale  des Flächenstücks. Gleiches gilt für das räumliche Flächenelement
des Flächenstücks. Gleiches gilt für das räumliche Flächenelement  auf der Oberfläche
auf der Oberfläche  des Körpers in der Momentankonfiguration. Diese Transformationen sind bei der
Zeitableitung der Integrale auf den linken Seiten der Gleichungen nützlich, weil
die Gebiete auf den linken Seiten von der Zeit abhängen nicht so aber auf den
rechten Seiten.
des Körpers in der Momentankonfiguration. Diese Transformationen sind bei der
Zeitableitung der Integrale auf den linken Seiten der Gleichungen nützlich, weil
die Gebiete auf den linken Seiten von der Zeit abhängen nicht so aber auf den
rechten Seiten.
Volumenverhältnis
Die Determinante von
gibt das lokale Volumenverhältnis  im betrachteten materiellen Punkt bei der Deformation an.
im betrachteten materiellen Punkt bei der Deformation an.
Damit ergibt sich u.a., dass  positiv sein muss, sonst wäre die Deformation physikalisch nicht möglich
(Inversion des materiellen Punktes).
positiv sein muss, sonst wäre die Deformation physikalisch nicht möglich
(Inversion des materiellen Punktes).
Bleibt bei einer Deformation das Volumen erhalten, also  ,
liegt Inkompressibilität
vor. Bei Gummi-
oder Elastomer-Werkstoffen ist dies eine übliche Annahme in der
kontinuumsmechanischen Beschreibung und durch das Verhalten dieser
Werkstoffklasse annähernd der Fall. Gleiches gilt für die inkompressiblen
Flüssigkeiten.
,
liegt Inkompressibilität
vor. Bei Gummi-
oder Elastomer-Werkstoffen ist dies eine übliche Annahme in der
kontinuumsmechanischen Beschreibung und durch das Verhalten dieser
Werkstoffklasse annähernd der Fall. Gleiches gilt für die inkompressiblen
Flüssigkeiten.
Transformation von Tensoren
Der Deformationsgradient transformiert neben den Linien-, Flächen- und Volumenelementen auch Tensoren von der Ausgangskonfiguration in die Momentankonfiguration. Diese Transformationen sind für kovariante Tensoren (oftmals Verzerrungstensoren) und kontravariante Tensoren (oftmals Spannungstensoren) unterschiedlich, z. B.:
 .
.
Der Tensor

ist der Euler-Almansi-Verzerrungstensor in der Momentankonfiguration,

der Green-Lagrange’sche Verzerrungstensor in der Ausgangskonfiguration,

der gewichtete Cauchy’sche Spannungstensor,
der Cauchy’sche Spannungstensor (beide in der Momentankonfiguration) und

der zweite Piola-Kirchhoff’sche Spannungstensor in der Ausgangskonfiguration. Das Skalarprodukt ":" der so einander zugeordneten Tensoren wird von der Transformation nicht verändert, z. B.:
 .
.
Multiplikative Zerlegung des Deformationsgradienten
Die Multiplikative Zerlegung des Deformationsgradienten wird in Materialtheorie angewendet, um die Deformation eines Körpers auf Grund verschiedener Einflüsse zu modellieren. So kann sich ein Körper deformieren, weil er erwärmt wird oder einer äußeren Kraft ausgesetzt wird. Die Deformation kann zusätzlich davon abhängen, wie schnell die Temperatur oder Kraft aufgebracht wird. Die Reaktionen des Materials lassen sich einfacher modellieren, wenn die Phänomene voneinander getrennt betrachtet werden. So kann ein Modell den Einfluss der Temperatur nachbilden und ein anderes Modell die isotherme Verformung durch Kräfte. Die Deformationen aufgrund des einen oder anderen Phänomens können dann anschließend wieder zusammengeführt werden. In der Materialtheorie hat es sich durchgesetzt bei kleinen Verformungen eine additive Zerlegung der Dehnungen und bei großen Verformungen eine multiplikative Zerlegung des Deformationsgradienten zu benutzen.
Seien also a und b zwei Verformungsanteile eines Materials. Für die Modellbildung wird der Deformationsgradient multiplikativ zerlegt:
 .
.
Ein Modell beschreibt dann die Entwicklung des Anteils  auf Grund des Einflusses a und ein anderes Modell die Entwicklung des
Anteils
auf Grund des Einflusses a und ein anderes Modell die Entwicklung des
Anteils  auf Grund des Einflusses b. Die Deformationsgradienten
und
erfüllen im Allgemeinen nicht die Kompatibilitätsbedingungen
weswegen es im Allgemeinen kein Bewegungsfeld gibt, aus dem die beiden Anteile
per Gradientenbildung abgeleitet werden können.
auf Grund des Einflusses b. Die Deformationsgradienten
und
erfüllen im Allgemeinen nicht die Kompatibilitätsbedingungen
weswegen es im Allgemeinen kein Bewegungsfeld gibt, aus dem die beiden Anteile
per Gradientenbildung abgeleitet werden können.
Weil der Deformationsgradient, wie im vorigen Abschnitt erläutert, Tensoren
von einer Konfiguration in die andere transformiert, entspricht die
multiplikative Zerlegung der Einführung einer Zwischenkonfiguration. Die
Tensoren der Referenzkonfiguration werden mit dem Anteil
und die der Momentankonfiguration mit
in die Zwischenkonfiguration transformiert. Transformation des
Green-Lagrange’schen Verzerrungstensors von der Referenzkonfiguration in die
Zwischenkonfiguration liefert:

Der in die Zwischenkonfiguration transformierte Green-Lagrange’sche Verzerrungstensor zerfällt also in zwei Anteile:
- Ein Anteil
 ist vom Green-Lagrange-Typ und wird mit
gebildet.
ist vom Green-Lagrange-Typ und wird mit
gebildet. - Der andere Anteil ist vom Euler-Almansi-Typ und wird mit
gebildet.
Gleiches gilt, wenn der Euler-Almansi Tensor  mit
auf die Zwischenkonfiguration transformiert wird:
mit
auf die Zwischenkonfiguration transformiert wird:

In der Zwischenkonfiguration können nun die beiden Phänomene mit den
Verzerrungstensoren
und  getrennt modelliert werden. Der sich im Modell in der Zwischenkonfiguration
ergebende Spannungstensor
wird anschließend mit
in die Momentankonfiguration oder mit
in die Referenzkonfiguration transformiert.
getrennt modelliert werden. Der sich im Modell in der Zwischenkonfiguration
ergebende Spannungstensor
wird anschließend mit
in die Momentankonfiguration oder mit
in die Referenzkonfiguration transformiert.
Deformationsraten
Die materielle Zeitableitung des Deformationsgradienten

ist ein Maß für die Deformationsgeschwindigkeit. Sie hängt über

mit dem räumlichen Geschwindigkeitsgradient  des räumlichen Geschwindigkeitsfeldes
des räumlichen Geschwindigkeitsfeldes  zusammen. In konvektiven Koordinaten lautet das
zusammen. In konvektiven Koordinaten lautet das

Beispiel
Die Berechnung des Deformationsgradienten und seiner polare Zerlegung wird anhand der Scherung eines Quadrates vorgeführt.
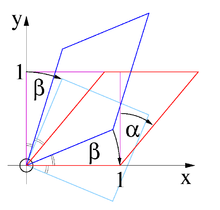
Ein Quadrat der Kantenlänge eins wird zu einem flächengleichen Parallelogramm mit Grundseite und Höhe eins verformt, siehe Abbildung 6. Die Punkte des Quadrates haben in der Ausgangskonfiguration die Koordinaten
![{\begin{pmatrix}X\\Y\end{pmatrix}}\in [0,1]^{2}\subset {\mathbb {R}}^{{2}}](/svg/b09bee8d2a736e8c6c37f0e8f60777397b135304.svg) .
.
Die Neigung des Parallelogramms sei
 .
.
Dann sind die räumlichen Koordinaten der Punkte gegeben durch
 .
.
Wie üblich wird  mit
mit  und
und  mit
mit  identifiziert. Dann bekommt man den Deformationsgradient durch Ableitung:
identifiziert. Dann bekommt man den Deformationsgradient durch Ableitung:
 .
.
Die Richtungsableitung liefert über
![{\begin{array}{lcl}{\mathbf {F}}\cdot {\begin{pmatrix}{\mathrm {d}}X\\{\mathrm {d}}Y\end{pmatrix}}&=&{\dfrac {\partial }{\partial s}}{\vec {\chi }}\left.\left({\begin{pmatrix}X\\Y\end{pmatrix}}+s{\begin{pmatrix}{\mathrm {d}}X\\{\mathrm {d}}Y\end{pmatrix}},t\right)\right|_{{s=0}}=\left.{\dfrac {\partial }{\partial s}}{\begin{pmatrix}(X+s{\mathrm {d}}X)+{\frac {5}{6}}(Y+s{\mathrm {d}}Y)\\(Y+s{\mathrm {d}}Y)\end{pmatrix}}\right|_{{s=0}}\\[3ex]&=&{\begin{pmatrix}{\mathrm {d}}X+{\frac {5}{6}}{\mathrm {d}}Y\\{\mathrm {d}}Y\end{pmatrix}}={\begin{pmatrix}1&{\frac {5}{6}}\\0&1\end{pmatrix}}{\begin{pmatrix}{\mathrm {d}}X\\{\mathrm {d}}Y\end{pmatrix}}\end{array}}](/svg/1163d767b4bd47c6c43180e4901165ba10eb5ad4.svg)
dasselbe Ergebnis. Der Deformationsgradient ist hier vom Ort und der Zeit
unabhängig und hat die Determinante eins, was den Erhalt des Flächeninhalts
bestätigt. Der rechte Strecktensor
berechnet sich aus dem rechten Cauchy-Green-Tensor

über Hauptachsentransformation, ziehen der Wurzel der Diagonalglieder und
Rücktransformation. Für die Hauptachsentransformation braucht man die Eigenwerte
 und -vektoren
und -vektoren  von
von  .
Man findet:
.
Man findet:
![{\begin{array}{lclclcl}\lambda _{1}&=&{\dfrac {9}{4}}&,\quad &{\vec {v}}_{1}&=&{\dfrac {1}{{\sqrt {13}}}}{\begin{pmatrix}2\\3\end{pmatrix}}\\[3ex]\lambda _{2}&=&{\dfrac {4}{9}}&,\quad &{\vec {v}}_{2}&=&{\dfrac {1}{{\sqrt {13}}}}{\begin{pmatrix}3\\-2\end{pmatrix}}\end{array}}](/svg/f0c4bcdc806f949246ec8ee3c4af532e83b5014b.svg) .
.
Mit diesen Eigenwerten und -vektoren erhält man die Hauptachsentransformation
![{\begin{array}{lcl}{\mathbf {C}}&=&\displaystyle \sum _{{i=1}}^{{2}}\lambda _{{i}}{\vec {v}}_{{i}}\otimes {\vec {v}}_{{i}}=\left(\sum _{{j=1}}^{{2}}{\vec {v}}_{{j}}\otimes {\vec {e}}_{{j}}\right)\cdot \left(\sum _{{i=1}}^{{2}}\lambda _{{i}}{\vec {e}}_{{i}}\otimes {\vec {e}}_{{i}}\right)\cdot \left(\sum _{{k=1}}^{{2}}{\vec {e}}_{{k}}\otimes {\vec {v}}_{{k}}\right)\\[3ex]&=&{\dfrac {1}{{\sqrt {13}}}}{\begin{pmatrix}2&3\\3&-2\end{pmatrix}}{\begin{pmatrix}{\frac {9}{4}}&0\\0&{\frac {4}{9}}\end{pmatrix}}{\dfrac {1}{{\sqrt {13}}}}{\begin{pmatrix}2&3\\3&-2\end{pmatrix}}\end{array}}](/svg/4f742c86e03e44df3aa602f2f39278f52a09a5d6.svg)
und damit den rechten Strecktensor
 .
.
Mit seiner Inversen

ergibt sich der Rotationstensor
 ,
,
siehe Drehmatrix. Der Rotationstensor dreht das im Bild königsblaue Parallelogramm oder hellblaue Quadrat um den Winkel
 .
.
Den linken Strecktensor kann man nun einfacher aus

ermitteln.
Siehe auch
Mathematik:
Literatur
- H. Altenbach: Kontinuumsmechanik. Springer 2012, ISBN 978-3-642-24118-5.
- P. Haupt: Continuum Mechanics and Theory of Materials. Springer Verlag, 2000, ISBN 3-540-66114-X.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 22.02. 2021