Verschiebungsgradient
 durch einen Tensor
durch einen Tensor  .
.Der Verschiebungsgradient (Formelzeichen:  )
ist in der Kontinuumsmechanik
ein einheitenfreier Tensor
zweiter Stufe, der die lokale Verformung in einem materiellen Punkt eines
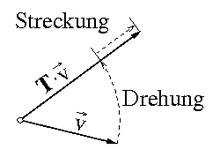
Körpers beschreibt. Tensoren zweiter Stufe werden hier als lineare Abbildungen
von geometrischen Vektoren auf geometrische Vektoren benutzt, die im Allgemeinen
dabei gedreht und gestreckt werden, siehe Abbildung rechts.
)
ist in der Kontinuumsmechanik
ein einheitenfreier Tensor
zweiter Stufe, der die lokale Verformung in einem materiellen Punkt eines
Körpers beschreibt. Tensoren zweiter Stufe werden hier als lineare Abbildungen
von geometrischen Vektoren auf geometrische Vektoren benutzt, die im Allgemeinen
dabei gedreht und gestreckt werden, siehe Abbildung rechts.
Die Verschiebung des Partikels eines Körpers ist die Strecke zwischen seiner aktuellen Lage und seiner Position in der (undeformierten) Ausgangslage. Der Verschiebungsgradient beschreibt nun, wie sich die Verschiebung ändert, wenn die Position in der Ausgangslage variiert. Mathematisch ist er der Gradient der den Verschiebungen zugeordneten Vektoren, daher der Name. Im allgemeinen Fall ist der Verschiebungsgradient sowohl vom Ort als auch von der Zeit abhängig. Die Komponenten des Verschiebungsgradienten berechnen sich wie eine Jacobimatrix und können auch in einer Matrix notiert werden.
Der Verschiebungsgradient unterscheidet sich vom Deformationsgradient nur durch den konstanten Einheitstensor, wird aber vor allem im Fall kleiner Verschiebungen benutzt. Kleine Verschiebungen liegen vor, wenn die größten, im Körper auftretenden Verschiebungen immer noch wesentlich kleiner sind als eine charakteristische Abmessung des Körpers. Bei kleinen Verschiebungen ist der Verschiebungsgradient eine grundlegende Größe mit der lokale Drehungen, Streckungen und Dehnungen quantifiziert werden. Sein symmetrischer Anteil entspricht beispielsweise der Ingenieursdehnung.
Definition
Der materielle Körper wird mit Konfigurationen in einen euklidischen Vektorraum abgebildet. In ihm wird die Bewegung eines materiellen Punktes mit der Bewegungsfunktion

beschrieben. Der Vektor  ist die aktuelle Position des materiellen Punktes
ist die aktuelle Position des materiellen Punktes  zur Zeit
zur Zeit  in der Momentankonfiguration. Die Komponenten
in der Momentankonfiguration. Die Komponenten  sind die räumlichen Koordinaten des Punktes bezüglich der Standardbasis
sind die räumlichen Koordinaten des Punktes bezüglich der Standardbasis  .
Der Vektor
.
Der Vektor

ist genauer die Position des betrachteten materiellen Punktes im
undeformierten Körper in der Ausgangs- oder Referenzkonfiguration. Die
Komponenten  sind die materiellen Koordinaten des betrachteten Punktes.
sind die materiellen Koordinaten des betrachteten Punktes.
Bei festgehaltenem materiellen Punkt
beschreibt die Bewegungsfunktion dessen Bahnlinie
durch den Raum. Die Verschiebung ist nun der Differenzvektor zwischen der
aktuellen Lage des Punktes im deformierten Körper und seiner ursprünglichen Lage
im undeformierten Körper:
 .
.
Um zu untersuchen wie sich die Verschiebung ändert, wenn die Position in der undeformierten Ausgangslage variiert wird, wird die Ableitung gebildet:
 .
.
Darin sind  die Komponenten des Verschiebungsgradienten bezüglich des Basissystems
.
die Komponenten des Verschiebungsgradienten bezüglich des Basissystems
.
Um zu einer koordinatenfreien Darstellung zu gelangen, wird das dyadische Produkt
 benutzt:
benutzt:
 .
.
Der Tensor
ist der Verschiebungsgradient und  ist das Symbol für den materiellen Gradienten,
denn es wird nach den materiellen Koordinaten
abgeleitet.
ist das Symbol für den materiellen Gradienten,
denn es wird nach den materiellen Koordinaten
abgeleitet.
Geometrische Linearisierung
In der Festkörpermechanik
treten in vielen, vor allem in technischen Anwendungsbereichen, nur kleine
Verschiebungen auf. In diesem Fall erfahren die Gleichungen der
Kontinuumsmechanik eine erhebliche Vereinfachung durch geometrische
Linearisierung. Wenn  eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl
eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl  als auch
als auch  gefordert, so dass alle Terme, die höhere Potenzen von
gefordert, so dass alle Terme, die höhere Potenzen von  oder
beinhalten, vernachlässigt werden können. Die Bezeichnungen für den Deformationsgradient
oder
beinhalten, vernachlässigt werden können. Die Bezeichnungen für den Deformationsgradient
 ,
,
den symmetrischen-

und schiefsymmetrischen Anteil

des Verschiebungsgradienten werden im Folgenden benutzt. Der linearisierte Verzerrungstensor

ist in der technischen Mechanik wohlbekannt und wird auch Ingenieursdehnung genannt.
Deformationsgradient und seine Polarzerlegung
Bei kleinen Verschiebungen sind die Invarianten des Deformationsgradienten Funktionen der Spur des Verschiebungsgradienten:
| Operator | Allgemeine Definition | Form bei kleinen Verschiebungen |
|---|---|---|
| Spur |  |
|
| Zweite Hauptinvariante |  |
 |
| Determinante |  |
 |
| Frobeniusnorm |  |
 |
Der Deformationsgradient  lässt sich eindeutig „polar“ in eine Rotation und eine reine Streckung zerlegen.
Durch Anwendung der Polarzerlegung
resultiert die Darstellung
lässt sich eindeutig „polar“ in eine Rotation und eine reine Streckung zerlegen.
Durch Anwendung der Polarzerlegung
resultiert die Darstellung
 .
.
Der Rotationstensor  ist ein „eigentlich
orthogonaler Tensor“. Der materielle Rechte Strecktensor
ist ein „eigentlich
orthogonaler Tensor“. Der materielle Rechte Strecktensor
 und der räumliche Linke Strecktensor
und der räumliche Linke Strecktensor  sind symmetrisch
und positiv
definit. Bei kleinen Verschiebungen sind sie identisch und linear in den
linearisierten Dehnungen, wie die folgende Tabelle zeigt:
sind symmetrisch
und positiv
definit. Bei kleinen Verschiebungen sind sie identisch und linear in den
linearisierten Dehnungen, wie die folgende Tabelle zeigt:
| Name | Allgemeine Definition | Form bei kleinen Verschiebungen |
|---|---|---|
| Rechter Strecktensor |  [1]
[1] |
 |
| Linker Strecktensor |  [1] [1] |
 |
| Rotationstensor |  |
 |
Die Identitäten

zeigen, dass bei kleinen Verzerrungen die Polarzerlegung des Deformationsgradienten in die additive Zerlegung des Verschiebungsgradienten in seinen schiefsymmetrischen und symmetrischen Anteil übergeht. Der Anteil

wird linearisierter Rotationstensor und der symmetrische Anteil
 ,
,
wird, wie oben erwähnt, linearisierter Verzerrungstensor oder Ingenieursdehnung genannt.
Bei den Inversen der Tensoren in der Tabelle dreht sich bei geometrischer Linearisierung das Vorzeichen des Anteils des Verschiebungsgradienten um:

Strecktensoren
Der rechte und linke Cauchy-Green Tensor sind bei kleinen Verschiebungen identisch und linear in den linearisierten Dehnungen:
| Name | Allgemeine Definition | Form bei kleinen Verschiebungen |
|---|---|---|
| Rechter Cauchy-Green Tensor |  |
 |
| Linker Cauchy-Green Tensor |  |
 |
Auch hier dreht sich bei Invertierung im geometrisch linearen Fall das
Vorzeichen von  um:
um:
 .
.
Verzerrungstensoren
Mit den obigen Ergebnissen für die Strecktensoren kann sofort bestätigt
werden, dass die Verzerrungstensoren bei kleinen Verschiebungen in den
linearisierten Verzerrungstensor
oder sein negatives übergehen:
| Name | Allgemeine Definition | Form bei kleinen Verschiebungen |
|---|---|---|
| Green-Lagrange Verzerrungstensor |  |
 |
| Biot-Verzerrungstensor |  |
 |
| Hencky Dehnungen |  [1]
[1] |
 [1]
[1] |
| Piola-Verzerrungstensor |  |
 |
| Euler-Almansi Verzerrungstensor |  |
 |
| Finger-Tensor |  |
 |
| Swainger-Verzerrungstensor |  |
 . . |
Siehe auch
Fußnoten
- ↑ a b c d Der Funktionswert eines symmetrischen, positiv definiten Tensors zweiter Stufe berechnet sich mittels seiner Hauptachsentransformation, Bildung des Funktionswertes der Diagonalelemente und Rücktransformation.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 07.12. 2020