Geometrische Linearisierung
Bei der geometrischen Linearisierung werden die kinematischen Gleichungen der Kontinuumsmechanik bezüglich der Verschiebungen linearisiert. Verschiebungen sind die bei einer Bewegung eines Körpers von seinen Partikeln zurückgelegten Wege. Dehnungen treten auf, wenn benachbarte Partikel stark unterschiedliche Verschiebungen aufweisen, weswegen die geometrische Linearisierung eine Linearisierung bezüglich der Dehnungen einschließt. Durch die geometrische Linearisierung erfahren die Gleichungen der Kontinuumsmechanik für Festkörper eine erhebliche Vereinfachung, die zulässig ist, wenn die Verschiebungen klein gegenüber einer charakteristischen Abmessung des Körpers und die Dehnungen klein gegen eins sind. Dann wird von kleinen Verschiebungen oder Deformationen im Gegensatz zu großen oder finiten Verschiebungen bzw. Deformationen gesprochen. In vielen Anwendungen im technischen Bereich werden kleine Verschiebungen angenommen oder müssen aus sicherheitstechnischen Gründen klein gehalten werden.
Von der geometrischen Linearisierung zu unterscheiden ist die physikalische Linearisierung, die Materialmodelle oder andere physikalische Nichtlinearitäten wie Körperkontakt betrifft. In physikalisch linearen Systemen sind die Gleichungen der Kontinuumsmechanik nach der geometrischen Linearisierung lineare Funktionen der Verschiebungen. In diesem Fall kann eine Rückwirkung der Verschiebungen auf die Steifigkeit eines Körpers, wie es beim Knicken und Beulen der Fall ist, nicht stattfinden. Drehungen von mehr als einem Grad oder Dehnungen von mehr als 3-8 % werden geometrisch linear nicht korrekt abgebildet. Deshalb darf die geometrische Linearisierung nur dann durchgeführt werden, wenn die vorgenannten Auswirkungen unerheblich sind.
Die geometrische Linearisierung wird angewandt, weil sich dadurch die Gleichungen der Kontinuumsmechanik in der lagrangeschen Beschreibung, z.B. in der Verschiebungsmethode, erheblich vereinfachen. Die Festigkeitslehre benutzt die geometrische Linearisierung in weiten Teilen. In physikalisch linearen Systemen ermöglicht die geometrische Linearisierung die Anwendung der airyschen Spannungsfunktion oder der Modalanalyse.
Definition
Verschiebung und ihr Gradient
Die Verschiebung ist der Differenzvektor zwischen der momentanen Lage eines Partikels und seiner Ausgangslage:
 .
.
Darin ist
 die Position eines Partikels mit materiellen Koordinaten
X1,2,3 bzw. X, Y und Z bezüglich der Standardbasis
die Position eines Partikels mit materiellen Koordinaten
X1,2,3 bzw. X, Y und Z bezüglich der Standardbasis  zu einer bestimmten Zeit
zu einer bestimmten Zeit  in der undeformierten Ausgangslage des Körpers,
in der undeformierten Ausgangslage des Körpers, die Bewegungsfunktion, die die aktuelle Position des Partikels zur Zeit
die Bewegungsfunktion, die die aktuelle Position des Partikels zur Zeit
 im Raum angibt, und
im Raum angibt, und die Verschiebung mit Komponenten u1,2,3 bzw.
u, v und w.
die Verschiebung mit Komponenten u1,2,3 bzw.
u, v und w.
Der Verschiebungsgradient wird mit dem dyadischen
Produkt  aus den Ableitungen der Verschiebungen nach den materiellen Koordinaten
gebildet:
aus den Ableitungen der Verschiebungen nach den materiellen Koordinaten
gebildet:
 .
.
Geometrische Linearisierung
Die geometrische Linearisierung bezieht sich auf die kinematischen
Gleichungen, die in der Kontinuumsmechanik in erster Linie den Deformationsgradient
und die Verzerrungstensoren
als Funktionen des Verschiebungsgradienten
definieren. Sei  eine skalar-
oder tensorwertige Funktion des
Verschiebungsgradienten
eine skalar-
oder tensorwertige Funktion des
Verschiebungsgradienten  ,
z.B. der Deformationsgradient oder eine seiner Hauptinvarianten. Die
geometrisch linearisierte Funktion
,
z.B. der Deformationsgradient oder eine seiner Hauptinvarianten. Die
geometrisch linearisierte Funktion  ergibt sich dann durch Vernachlässigung aller Terme, die die Frobeniusnorm
ergibt sich dann durch Vernachlässigung aller Terme, die die Frobeniusnorm  des Verschiebungsgradienten in höherer Ordnung als eins enthalten. Sei
des Verschiebungsgradienten in höherer Ordnung als eins enthalten. Sei  und
und  das Landau
Symbol für Terme, die mindestens quadratisch in
das Landau
Symbol für Terme, die mindestens quadratisch in  sind und vernachlässigt werden können. Dann ist mathematisch ausgedrückt:
sind und vernachlässigt werden können. Dann ist mathematisch ausgedrückt:
 .
.
Mit dem Formalismus der Linearisierung kann die geometrisch linearisierte Funktion mit dem Gâteaux-Differential
![{\mathrm {D}}f({\mathbf {H}})[{\mathbf {X}}]:=\left.{\frac {{\mathrm {d}}}{{\mathrm {d}}s}}f({\mathbf {H}}+s{\mathbf {X}})\right|_{{s=0}}=\lim _{{s\rightarrow 0}}{\frac {f({\mathbf {H}}+s{\mathbf {X}})-f({\mathbf {H}})}{s}}](/svg/fc7548a13c74d09a01074739a9f76947495d787c.svg)
wie folgt definiert werden:
![f_{t}({\mathbf {H}}):=f({\mathbf {0}})+{\mathrm {D}}f({\mathbf {0}})[{\mathbf {H}}]=f({\mathbf {0}})+\left.{\frac {{\mathrm {d}}}{{\mathrm {d}}s}}f(s{\mathbf {H}})\right|_{{s=0}}=f({\mathbf {0}})+\lim _{{s\rightarrow 0}}{\frac {f(s{\mathbf {H}})-f({\mathbf {0}})}{s}}](/svg/cc0c5c7f0bce18e6a9a8c0461ea2cf9cd3104ce9.svg)
Die Funktion  approximiert die Funktion f also linear und zwar an der Stelle
approximiert die Funktion f also linear und zwar an der Stelle  .
Prinzipiell kann aber auch an jeder anderen Stelle linearisiert werden.
.
Prinzipiell kann aber auch an jeder anderen Stelle linearisiert werden.
Eine direkte Abhängigkeit von den Verschiebungen kann in den Randbedingungen
eines kontinuumsmechanischen Randwertproblems
auftreten. Sei  eine verschiebungsabhängige Randbedingung,
z.B. eine in der Lagerung
des Körpers vorgegebene Verschiebung oder Verdrehung. Dann wird diese analog zur
Funktion f mittels
eine verschiebungsabhängige Randbedingung,
z.B. eine in der Lagerung
des Körpers vorgegebene Verschiebung oder Verdrehung. Dann wird diese analog zur
Funktion f mittels

an der Stelle  geometrisch linearisiert.
geometrisch linearisiert.
Geometrische Linearisierung nach Vordeformation
Eine geometrische Linearisierung abseits des Ursprungs kommt in der Praxis vor, wenn an einem bereits finiten (nicht kleinen) Deformationen und/oder Rotationen unterworfenem Körper, z.B. nach einem Umformprozess, eine Modalanalyse vorgenommen werden soll. Diese ist eine lineare Prozedur, die eine Linearisierung der Modellgleichungen zwingend erforderlich macht und deshalb eine geometrische Linearisierung impliziert. Die linearisierten Terme berechnen sich dann gemäß

Darin ist  der Arbeitspunkt, in dem linearisiert wird, und
der Arbeitspunkt, in dem linearisiert wird, und  eine kleine (
eine kleine ( )
Abweichung vom Arbeitspunkt. Die Linearisierung der Randbedingungen erfolgt in
analoger Weise am Arbeitspunkt
)
Abweichung vom Arbeitspunkt. Die Linearisierung der Randbedingungen erfolgt in
analoger Weise am Arbeitspunkt  :
:

Nichtlinear geometrische Effekte
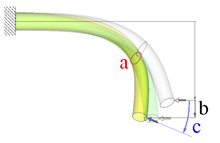
Abb. 1:
Deformation eines Rohres (von grau nach gelb): a) Verformung des
Querschnitts ändert die Steifigkeit (rot) b) Auslenkung ändert die
Steifigkeit c) Deformation ändert Kraftrichtung (blau), grün angedeutet:
lineare Rechnung |
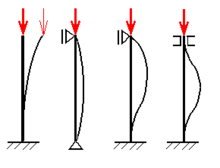
Abb. 2: Beim Knicken verringert sich die Steifigkeit durch ein seitliches
Ausweichen der Biegelinie (schwarz, dünn) von der Stab- oder Balkenachse
(schwarz, fett). Das Ausweichen wird durch die Belastung (rot) weiter
verstärkt. |
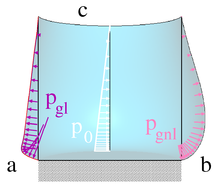
Abb.
3: Behälter unter hydrostatischem Druck (weiß), a) geometrisch linear, b)
geometrisch nichtlinear gerechnet |
Die obigen Abbildungen zeigen Beispiele, in denen beachtliche geometrische Nichtlinearität auftritt. Die Effekte der geometrischen Nichtlinearität können in zwei Kategorien eingeteilt werden:
- Große Dehnungen: Die durch die Dehnungen hervorgerufene Formänderung wirkt auf die Steifigkeit des Körpers oder die äußeren Kräfte zurück. Die in Abb. 1 auftretende Änderung des Rohrquerschnitts (a, rot) ist hierfür ein Beispiel und reduziert dort die Biegesteifigkeit des Rohres. Abb. 3 zeigt im rechten Bildteil wie große Dehnungen auch beachtliche Drehungen bewirken können.
- Große Auslenkungen: Diese können auf die Steifigkeit des Körpers oder die äußeren Kräfte zurückwirken. Abb. 1 zeigt dazu, wie durch die Deformation des Rohres der Kraftangriffspunkt auswandert und sich so das Biegemoment erhöht (b) und sich die Belastungsrichtung ändert (c, blau). Große Drehungen ohne Dehnungen gehören auch in diese Kategorie.
Die genannten Effekte der geometrischen Nichtlinearität können nach der Linearisierung nicht mehr abgebildet werden: Eine Rückwirkung der Verformung auf die Steifigkeit des Körpers oder der äußeren Kräfte wird vernachlässigt. Deshalb reagiert das Rohr in Abb. 1 bei linearer Rechnung (grün) deutlich steifer als bei geometrisch nichtlinearer (gelb).
Im Folgenden werden die Beispiele in Abbildungen 2 und 3 oben näher beleuchtet.
Knicken des geraden Stabes
Das Knicken des geraden Stabes ist ein Effekt der geometrischen Nichtlinearität durch große Auslenkungen, siehe Abb. 2 oben. Solange die Belastung unterhalb einer kritischen Last bleibt, vermag die Struktur dieser standzuhalten. Oberhalb der kritischen Last kommt es zur positiven Rückkopplung zwischen der Belastungszunahme und Steifigkeitsabnahme durch die Auslenkung, was zum dramatischen Ausfall der Struktur führen kann.
Behälter unter Drucklast
Auf eine Behälterwand wirkende hydrostatische Drucklast, wie in Abb. 3 weiß angedeutet, ist der typische Fall für eine der Verformung folgenden Last, denn Druck wirkt immer senkrecht auf Flächen. Die Abbildung zeigt einen unten und am oberen Rand (c) drehbar aber unverschieblich gelagerten Behälter der einem hydrostatischen Druck p0 ausgesetzt ist, so wie er sich ausbildet, wenn der Behälter mit einer Flüssigkeit gefüllt ist.
Bei geometrisch linearer Rechnung (a, links im Bild) nimmt die horizontale Druckkomponente linear über die Höhe der Behälterwand ab. Ohne Berücksichtigung der Verdrehung der Behälterwand, siehe Abschnitt #Folgelast unten, wirkt auf diese der Druck in horizontaler Richtung (weiß) und die Wand verformt sich zur blauen Kurve. Bei linearer Berücksichtigung der Verdrehung, entsteht die lila gezeichnete Belastung pgl und die mit der blauen Kurve fast deckungsgleiche rote Kurve der Wandlinie. Obwohl die vertikale Druckkomponente hier deutlich größer ist als bei geometrisch nichtlinear Rechnung (rosa), ist die Verformung der Wand kleiner, weil die vertikale Komponente von der im unverformten Zustand berechneten Steifigkeit der senkrechten Wand leichter ertragen wird.
Der rechte Bildteil (b) zeigt das Ergebnis einer geometrisch nichtlinearen Rechnung, wo der Druck pgnl (rosa) immer senkrecht auf die Behälterwand wirkt. Durch die Ausbeulung nimmt einerseits die Stützwirkung der Wand in vertikaler Richtung ab. Andererseits ist die Dehnung der Behälterwand in senkrechter Richtung bedeutsam, weil die durch sie hervorgerufenen Membrankräfte in der Wand dem Druck entgegenwirken, ein Effekt, den die geometrisch lineare Rechnung nicht abbildet, wie im folgenden Abschnitt dargelegt wird.
Analytische Betrachtungen
In diesem Abschnitt werden Beispiele von Bewegungen untersucht, anhand derer
die Auswirkungen der geometrischen Linearisierung makroskopisch sichtbar und
analytisch nachweisbar sind. Um die Effekte hervortreten zu lassen, werden
große, mit einem Parameter  skalierte Bewegungen betrachtet, in denen die Anwendung der geometrischen
Linearisierung nicht angebracht ist. Mit einem kleinen Wert von
nahe 0,01 würde die Deformation in einem Bereich liegen, wo die geometrische
Linearisierung zulässig wäre.
skalierte Bewegungen betrachtet, in denen die Anwendung der geometrischen
Linearisierung nicht angebracht ist. Mit einem kleinen Wert von
nahe 0,01 würde die Deformation in einem Bereich liegen, wo die geometrische
Linearisierung zulässig wäre.
Drehung
Bei einer reinen Drehung eines Körpers in der x-y-Ebene um einen festen Raumpunkt p liegt die Bewegungsfunktion und Verschiebung

vor. Die Matrix ist der Verschiebungsgradient
 .
.
Hieraus läßt sich die auch bei großen Rotationen gültige Beziehung
ablesen. Der symmetrische Anteil des Gradienten sind die Ingenieursdehnungen:
 ,
,
die bei kleinen Drehwinkeln - und nur dann - näherungsweise verschwinden. Die Animation zeigt die v. Mises Vergleichsspannung in einem linear elastischen Stahlklotz (E=200.000 MPa, G=77.000 MPa) auf Grund von Ingenieursdehnungen bei einer Starrkörperdrehung um maximal 5°. Die mit der irrigen Annahme kleiner Dehnungen berechneten Spannungen liegen über der Streckgrenze vieler Stähle.
Verzerrungsfreie Drehstreckung
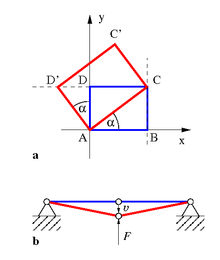
Die Rückstellkraft F einer senkrecht zu ihrer Ausrichtung um v ausgelenkten, linearen, biegeschlaffen Struktur (Seil, Stabwerk oder Membran) in Abb. 4b ist ein geometrisch nichtlinearer Effekt und kann bei geometrisch linearer Rechnung nicht nachgebildet werden. Die folgende analytische Betrachtung zeigt wieso.
Bei der in Abb. 4a abgebildeten Drehstreckung eines Rechtecks hängt
die Verschiebung  in x-Richtung nur von der y-Koordinate und die Verschiebung
in x-Richtung nur von der y-Koordinate und die Verschiebung  in y-Richtung nur von der x-Koordinate des verschobenen Punktes ab:
in y-Richtung nur von der x-Koordinate des verschobenen Punktes ab:

Bildung des Gradienten liefert den Verschiebungsgradienten:

und den linearisierten Verzerrungstensor

der der symmetrische Anteil des Verschiebungsgradienten ist und der hier verschwindet.
Im gedrehten Rechteck treten in geometrisch linearer Näherung wegen

keine Schubverzerrungen auf, was nicht erstaunt denn diese Identität liegt auch bei einer reinen Drehung vor, siehe #Drehung oben.
Bemerkenswert ist aber, dass die Verschiebung des Punktes B nach C senkrecht zur Strecke (AB) in geometrisch linearer Näherung keine Streckung der Linie (AB) verursacht. Der Deformationsgradient, der die Summe aus dem Verschiebungsgradient und dem Einheitstensor I ist, und seine polare Zerlegung

in eine Drehung
 und eine rotationsfreie Streckung
und eine rotationsfreie Streckung  zeigen die Ursache für dieses Verhalten. Die Normalstreckungen in x- und
y-Richtung
zeigen die Ursache für dieses Verhalten. Die Normalstreckungen in x- und
y-Richtung

sind in linearer Näherung gleich eins, denn der Winkel
ist von gleicher Ordnung wie die yx-Komponente des Verschiebungsgradienten:
 .
.
In Abwesenheit einer Streckung verschwinden aber auch die Normaldehnungen, die im Körper Normalspannungen hervorrufen würden und die in Abb. 4b die Rückstellkraft bewirken würden.
Schubverzerrungsfreie Scherung
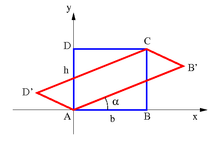
Gegeben sei ein Rechteck mit Breite b und Höhe h, das wie in der Abb. 5 im Ursprung liegt und parallel zu den Koordinatenachsen ausgerichtet ist (blau). Mit dem Verschiebungsfeld

wird das Rechteck zum rot dargestellten Parallelogramm verformt. Der Verschiebungsgradient und linearisierte Verzerrungstensor lauten:

Bei der Scherung des Rechtecks verschwinden die Schubverzerrungen wegen der auch bei Drehungen vorliegenden Identität
 ,
,
siehe #Drehung oben. Eine geometrisch nichtlineare Rechnung ergibt die Green-Lagrange'schen Schubverzerrungen

die wegen  im linearisierten Verzerrungstensor wegfallen. Die Schubsteifigkeit eines
Bauteils kann so bei geometrisch linearer Rechnung und großen Deformationen
unterschätzt werden.
im linearisierten Verzerrungstensor wegfallen. Die Schubsteifigkeit eines
Bauteils kann so bei geometrisch linearer Rechnung und großen Deformationen
unterschätzt werden.
Folgelast
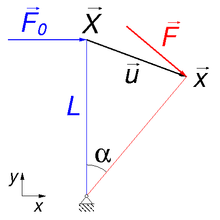
Auf eine senkrecht stehende, drehbare Wand (Länge L, blau im Abb. 6) wirkt
senkrecht im Punkt X eine Kraft F0 so, dass sich die
Wand um einen Winkel
dreht und sich der Kraftangriffspunkt um den Vektor  verschiebt (rot):
verschiebt (rot):

Die Kraft folgt dabei der Drehung, wodurch sie eine Funktion des Winkels wird:

In geometrisch linearer Näherung ist:
 .
.
Der Kraftangriffspunkt verschiebt sich in geometrisch linearer Näherung ausschließlich in x-Richtung und die y-Komponente der Kraft ändert sich linear mit dem Drehwinkel. Dieser Effekt wurde bei der Berechnung des Behälters unter hydrostatischem Druck in Abb. 3 berücksichtigt, was zur Belastung gemäß der lila Pfeile und der Verformung gemäß der roten Kurve im linken Bildteil führt (a).
Fazit
Die geometrische Linearisierung vereinfacht die kontinuumsmechanischen Berechnungen erheblich, weil die primäre Unbekannte - die Verschiebung - in den Verzerrungen nur noch linear auftritt. Diese Vereinfachung ist bei kleinen Verschiebungen und Verzerrungen angebracht und zulässig. Bei großen Verschiebungen treten geometrisch nichtlineare Effekte auf, die für die berechneten Ergebnisse entscheidend sind und bei Nichtbeachtung dramatische Fehlbeurteilungen nach sich ziehen können.
Beispiele
Skalare Funktion
Es soll die Determinante
des Deformationsgradienten
 geometrisch linearisiert werden. Der Deformationsgradient ist die Summe aus dem
Verschiebungsgradienten und dem Einheitstensor.
Mit dem charakteristischen
Polynom berechnet sich:
geometrisch linearisiert werden. Der Deformationsgradient ist die Summe aus dem
Verschiebungsgradienten und dem Einheitstensor.
Mit dem charakteristischen
Polynom berechnet sich:
![{\begin{array}{rcl}\operatorname {det}_{t}({\mathbf {F}}={\mathbf {I}}+{\mathbf {H}})&=&\operatorname {det}({\mathbf {I}})+{\mathrm {D}}\operatorname {det}({\mathbf {0}})[{\mathbf {H}}]\\&=&1+\left.{\frac {{\mathrm {d}}}{{\mathrm {d}}s}}\operatorname {det}({\mathbf {I}}+s{\mathbf {H}})\right|_{{s=0}}\\&=&1+\left.{\frac {{\mathrm {d}}}{{\mathrm {d}}s}}\left[s^{3}\operatorname {det}({\mathbf {H}}+{\frac {1}{s}}{\mathbf {I}})\right]\right|_{{s=0}}\\&=&1+\left.{\frac {{\mathrm {d}}}{{\mathrm {d}}s}}\left[s^{3}\left({\frac {1}{s^{3}}}+{\frac {1}{s^{2}}}\operatorname {Sp}({\mathbf {H}})+{\frac {1}{s}}\operatorname {I}_{2}({\mathbf {H}})+\operatorname {det}({\mathbf {H}})\right)\right]\right|_{{s=0}}\\&=&1+\left.{\frac {{\mathrm {d}}}{{\mathrm {d}}s}}\left[1+s\operatorname {Sp}({\mathbf {H}})+s^{2}\operatorname {I}_{2}({\mathbf {H}})+s^{3}\operatorname {det}({\mathbf {H}})\right]\right|_{{s=0}}\\&=&1+\left.(\operatorname {Sp}({\mathbf {H}})+2s\operatorname {I}_{2}({\mathbf {H}})+3s^{2}\operatorname {det}({\mathbf {H}}))\right|_{{s=0}}\\&=&1+\operatorname {Sp}({\mathbf {H}}).\end{array}}](/svg/e563ebe9eaca41483a1710e976202b6240b053e7.svg)
Die Funktion  ist die zweite Hauptinvariante.
Im geometrisch linearen Fall ist also
ist die zweite Hauptinvariante.
Im geometrisch linearen Fall ist also
 .
.
Tensorielle Funktion
Es soll die Inverse des Deformationsgradienten
 geometrisch linearisiert werden. Aus
geometrisch linearisiert werden. Aus

ergibt sich in linearer Näherung:
 .
.
Dies kann mit der Differentialrechnung wie folgt bestätigt werden. Aus dem (verschwindenden) Gâteaux-Differenzial des Einheitstensors wird mit der Produktregel das Differenzial des inversen Deformationsgradienten ermittelt:
![{\begin{array}{rcl}{\mathrm {D}}{\mathbf {I}}({\mathbf {0}})[{\mathbf {H}}]&=&{\mathrm {D}}({\mathbf {F\cdot F}}^{{-1}})({\mathbf {0}})[{\mathbf {H}}]\\&=&\underbrace {{\mathrm {D}}{\mathbf {F}}({\mathbf {0}})[{\mathbf {H}}]}_{{{\mathbf {H}}}}\cdot \underbrace {{\mathbf {F}}^{{-1}}({\mathbf {0}})}_{{{\mathbf {I}}}}+\underbrace {{\mathbf {F}}({\mathbf {0}})}_{{{\mathbf {I}}}}\cdot {\mathrm {D}}{\mathbf {F}}^{{-1}}({\mathbf {0}})[{\mathbf {H}}]={\mathbf {0}}\\\rightarrow {\mathrm {D}}{\mathbf {F}}^{{-1}}({\mathbf {0}})[{\mathbf {H}}]&=&-{\mathbf {H}}.\end{array}}](/svg/830e0d1f9cb4fa85c8fa1f0099b13e9ac90ebbac.svg)
Mit diesem Differenzial lautet die geometrisch lineare Inverse des Deformationsgradienten:
![{\mathbf {F}}_{t}^{{-1}}({\mathbf {H}})=\underbrace {{\mathbf {F}}^{{-1}}({\mathbf {0}})}_{{{\mathbf {I}}}}+\underbrace {{\mathrm {D}}{\mathbf {F}}^{{-1}}({\mathbf {0}})[{\mathbf {H}}]}_{{-{\mathbf {H}}}}={\mathbf {I}}-{\mathbf {H}}.](/svg/95b5055d4418ce0cffeab88adf0d6c7ec5f03ce8.svg)


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 12.02. 2021