Verschiebungsmethode
Die Verschiebungsmethode ist die Standardformulierung der Finite-Elemente-Methode (FEM), bei der die Verschiebungen der Körperpunkte die primären Unbekannten sind. In der Festkörpermechanik beinhalten die Verschiebungen die Wege, die die Körperpunkte mit der Zeit zurücklegen und damit die Translation, Rotation und möglicherweise Verformung eines Festkörpers. Die erste Anwendung der FEM war die lineare Behandlung von Festkörpern und Strukturen (bestehend aus Stäben, Balken oder Schale) und davon ausgehend hat die FEM ihre Anstöße erhalten.
Eine der Verschiebungsmethode zugrunde liegende Gleichung ist das Prinzip von d’Alembert in der Lagrange’schen Fassung. Mit diesem Prinzip können sowohl lineare Probleme, wie die Frage nach Eigenschwingungen, als auch hoch nichtlineare Probleme, wie Crashtests, analysiert werden. Wegen ihrer Einsetzbarkeit in den meisten Problemstellungen werden in der Standardformulierung isoparametrische Elemente verwendet. Auch die Galerkin-Methode wird verwendet.
Die Verschiebungsmethode ist in allen gängigen Finite-Elemente-Programmen verfügbar, mit denen Probleme der Festkörpermechanik berechnet werden können, wobei sich die Programme in den verwendeten Dehnungsmaßen, implementierten Nichtlinearitäten, Materialmodellen, Zeitintegrationsverfahren und/oder numerischen Umsetzungen unterscheiden können.
Matrizengleichungen
Das Prinzip von d’Alembert in der Lagrange’schen Fassung ist eine zur Impulsbilanz äquivalente Aussage und lautet

Der erste Term ist die über das Volumen V des Körpers summierte virtuelle
Arbeit der Impulsänderung  an den virtuellen Verschiebungen
an den virtuellen Verschiebungen  Der Faktor
Der Faktor  ist die Dichte
und
ist die Dichte
und  die Beschleunigung des materiellen Punktes. Im zweiten Term wird die vom Spannungstensor
die Beschleunigung des materiellen Punktes. Im zweiten Term wird die vom Spannungstensor  am virtuellen Verzerrungstensor
am virtuellen Verzerrungstensor
 geleistete virtuelle Deformationsarbeit, die mit dem Frobenius-Skalarprodukt
„:“ der Tensoren gebildet wird, über das Volumen V des Körpers summiert. Auf der
rechten Seite steht die Arbeit der äußeren Kräfte (oberflächen- und
volumenverteilt) an den virtuellen Verschiebungen. Die Menge
geleistete virtuelle Deformationsarbeit, die mit dem Frobenius-Skalarprodukt
„:“ der Tensoren gebildet wird, über das Volumen V des Körpers summiert. Auf der
rechten Seite steht die Arbeit der äußeren Kräfte (oberflächen- und
volumenverteilt) an den virtuellen Verschiebungen. Die Menge  enthält alle zulässigen virtuellen Verschiebungen, die verschwinden woimmer
Verschiebungsrandbedingungen vorgegeben sind. Die Fläche
enthält alle zulässigen virtuellen Verschiebungen, die verschwinden woimmer
Verschiebungsrandbedingungen vorgegeben sind. Die Fläche  ist derjenige Teil der Oberfläche des Körpers, auf der keine
Verschiebungsrandbedingungen vorliegen.
ist derjenige Teil der Oberfläche des Körpers, auf der keine
Verschiebungsrandbedingungen vorliegen.
Wenn die Gleichung oben tatsächlich für alle erlaubten virtuellen Verschiebungen erfüllt ist, dann sind die Verschiebungen sowie die daraus resultierenden Verzerrungen und Spannungen im Einklang mit der Impulsbilanz. Die vorausgesetzte Symmetrie des Spannungstensors bewirkt zusätzlich die Erfüllung der Drehimpulsbilanz.
Überführung des Prinzips in eine Matrizengleichung
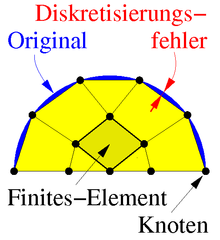
Der interessierende Körper wird vorbereitend in Teilkörper, die Finiten-Elemente, unterteilt, siehe Bild. Damit die Elemente den Körper lückenlos und überschneidungsfrei aufbauen, müssen benachbarte Elemente kompatibel sein. Auf den Begrenzungsflächen oder auch im Inneren der Elemente liegen Knoten genannte Punkte, denen globale Koordinaten zur geometrischen Beschreibung des Körpers und Verschiebungen als Knotenvariable zur Beschreibung der Bewegung zugeteilt werden.
Anhand eines Elementes wird die Überführung der Tensorgleichung des Prinzips in eine Matrizengleichung vollzogen:
- Die Elementverschiebungen werden mit einem rein zeitabhängigen
Lösungsvektor
 der Länge m mit Knotenverschiebungen und einer rein ortsabhängigen 3×m Formfunktionsmatrix N
dargestellt:
der Länge m mit Knotenverschiebungen und einer rein ortsabhängigen 3×m Formfunktionsmatrix N
dargestellt:
-
- Damit lauten die Elementbeschleunigungen
 Die Formfunktionen sind die Ansatzfunktionen für die Lösung und durch die
Beschränkung auf eine endliche Anzahl von ihnen ergibt sich der – in
Abwesenheit einer analytischen Lösung unvermeidliche –
Diskretisierungsfehler.
Die Formfunktionen sind die Ansatzfunktionen für die Lösung und durch die
Beschränkung auf eine endliche Anzahl von ihnen ergibt sich der – in
Abwesenheit einer analytischen Lösung unvermeidliche –
Diskretisierungsfehler.

- In der Galerkin-Methode werden die virtuellen Verschiebungen genauso behandelt wie die Punktverschiebungen:

- Der Spannungstensor wird mittels Voigt’scher Notation als Spaltenvektor geschrieben:
-
- Das Superskript
 bezeichnet die Transposition.
bezeichnet die Transposition.

- In gleicher Weise werden die virtuellen Verzerrungen in einen Vektor eingetragen:
-
- Der Faktor zwei an der vierten bis sechsten Position stellt sicher, dass
das Skalarprodukt mit dem Matrixprodukt übereinstimmt
 Außerdem entspricht die doppelte Schubverzerrung der
Gleitung γ, so dass die Komponenten eine anschauliche Interpretation
besitzen.
Außerdem entspricht die doppelte Schubverzerrung der
Gleitung γ, so dass die Komponenten eine anschauliche Interpretation
besitzen.

- Die differentiellen virtuellen Verzerrungen sind linear in den virtuellen Knotenverschiebungen:
-
- mit der 6×m Verzerrungsverschiebungsmatrix B.

Diese Definitionen, die im Abschnitt #Elementmatrizen an den Integrationspunkten unten ausgeführt werden, werden in das Prinzip eingetragen:
![{\displaystyle {\begin{aligned}\int _{V}\delta {\hat {u}}^{\top }N^{\top }\rho _{0}N{\hat {\ddot {u}}}\,{\text{d}}V+\int _{V}\delta {\hat {E}}^{\top }{\hat {T}}\,{\text{d}}V=\int _{{A}^{\sigma }}\delta {\hat {u}}^{\top }N^{\top }{\vec {t}}_{0}\,{\text{d}}A+\int _{V}\delta {\hat {u}}^{\top }N^{\top }\rho _{0}{\vec {k}}_{0}\,{\text{d}}V&\quad \forall \;\delta {\hat {u}}\in V^{m}\\\rightarrow \delta {\hat {u}}^{\top }{\Biggl [}\underbrace {\int _{V}N^{\top }\rho _{0}N\,{\text{d}}V} _{M}{\hat {\ddot {u}}}+\underbrace {\int _{V}B^{\top }{\hat {T}}\,{\text{d}}V} _{\hat {r}}-\underbrace {\left(\int _{{A}^{\sigma }}N^{\top }{\vec {t}}_{0}\,{\text{d}}A+\int _{V}N^{\top }\rho _{0}{\vec {k}}_{0}\,{\text{d}}V\right)} _{\hat {f}}{\Biggr ]}=0&\quad \forall \;\delta {\hat {u}}\in V^{m}\,.\end{aligned}}}](/svg/1af20602a52ffcbd6fbf5943b505b6fe688fc22b.svg)
Die Menge  enthält alle zulässigen virtuellen Verschiebungsvektoren der Dimension m×1. Die
Knotenvariablen können aus den Integralen herausgezogen werden, weil die
Ortsabhängigkeit allein bei den Formfunktionen liegt. So entsteht die
Prinzipgleichung:
enthält alle zulässigen virtuellen Verschiebungsvektoren der Dimension m×1. Die
Knotenvariablen können aus den Integralen herausgezogen werden, weil die
Ortsabhängigkeit allein bei den Formfunktionen liegt. So entsteht die
Prinzipgleichung:
![{\displaystyle \delta {\hat {u}}^{\top }[M{\hat {\ddot {u}}}+{\hat {r}}-{\hat {f}}]=0\quad \forall \;\delta {\hat {u}}\in V^{m}}](/svg/0ba26e99f091b7555995dcfa473667fe214694d6.svg) |
|
(PvdA) |
|
|
Die m×m Matrix M ist die konstante Massenmatrix, der m×1 Vektor  enthält Knotenreaktionen aufgrund von Elementspannungen und
enthält Knotenreaktionen aufgrund von Elementspannungen und  ist der gleich große Knotenkraftvektor, der die von außen angreifenden Kräfte
repräsentiert.
ist der gleich große Knotenkraftvektor, der die von außen angreifenden Kräfte
repräsentiert.
Diese Gleichung wurde für ein Finites-Element aufgestellt, was statthaft ist, weil das Prinzip für jeden Körper und jeden seiner Teilkörper gilt. Beim Übergang vom Finiten-Element zum ganzen Körper werden die Elementmatrizen in einem Assemblierungsschritt in globalen Matrizen aufsummiert. Das globale System unterliegt auch der Prinzipgleichung (PvdA), nur die Matrizen und Vektoren sind größer.
Partitionierung des globalen Systems
Die Menge
enthält alle zulässigen virtuellen Verschiebungsvektoren der Dimension
m×1. Zulässig ist ein virtueller Verschiebungsvektor, wenn seine Komponenten
verschwinden, wo im Lösungsvektor Randbedingungen vorgegeben sind. Die
Komponenten des Lösungsvektors, die an Verschiebungsrandbedingungen gebunden
sind, werden an das Ende des Lösungsvektors verlegt:

Der Vektor  enthält die gesuchten unbekannten Knotenverschiebungen und
enthält die gesuchten unbekannten Knotenverschiebungen und  sind in Randbedingungen vorgegeben. Im Vektor der äußeren Kräfte
besteht der untere Teil aus Nullen, weil an Orten, wo
Verschiebungsrandbedingungen vorliegen, keine Kräfte vorgegeben werden können.
Die Massenmatrix wird ebenfalls partitioniert:
sind in Randbedingungen vorgegeben. Im Vektor der äußeren Kräfte
besteht der untere Teil aus Nullen, weil an Orten, wo
Verschiebungsrandbedingungen vorliegen, keine Kräfte vorgegeben werden können.
Die Massenmatrix wird ebenfalls partitioniert:

Damit entsteht aus der Gleichung (PvdA):
![{\displaystyle {\begin{aligned}{\begin{pmatrix}\delta {\hat {u}}_{u}^{\top }&{\hat {0}}^{\top }\end{pmatrix}}\left[{\begin{pmatrix}M_{uu}&M_{ub}\\M_{bu}&M_{bb}\end{pmatrix}}{\begin{pmatrix}{\hat {\ddot {u}}}_{u}\\{\hat {\ddot {u}}}_{b}\end{pmatrix}}+{\begin{pmatrix}{\hat {r}}_{u}\\{\hat {r}}_{b}\end{pmatrix}}-{\begin{pmatrix}{\hat {f}}_{u}\\{\hat {0}}\end{pmatrix}}\right]=&\\\delta {\hat {u}}_{u}^{\top }\left(M_{uu}{\hat {\ddot {u}}}_{u}+M_{ub}{\hat {\ddot {u}}}_{b}+{\hat {r}}_{u}-{\hat {f}}_{u}\right)=&0\quad \forall \;\delta {\hat {u}}_{u}\in \mathbb {R} ^{m_{u}}\,,\end{aligned}}}](/svg/e2e3433e5fce58f61218f594e747f25823406334.svg)
wenn mu die Dimension des Vektors
ist. Die obige Gleichung erzwingt das Verschwinden der Summe in den runden
Klammern mit dem Resultat:

Sobald die Verschiebungen vollständig ermittelt wurden, ist es üblich – falls gewünscht – aus der herausgefallenen unteren Gleichungszeile die Reaktionen an den Lagerungen zu berechnen, beispielsweise:

Im Text angenommene Vereinfachungen
Der Einfachheit halber werden im Folgenden nur statische Festlager betrachtet
in denen die Verschiebungen und Beschleunigungen null sind. Dann treten diese
Verschiebungen und Beschleunigungen im Gleichungssystem nicht auf und auf eine
Partitionierung in unbekannte und bekannte Anteile kann verzichtet werden. Der
Vektor
mit den Unbekannten habe nach wie vor die Dimension m. Dann folgt aus der
Gleichung ![{\displaystyle \delta {\hat {u}}^{\top }[M{\hat {\ddot {u}}}+{\hat {r}}-{\hat {f}}]=0\quad \forall \;\delta {\hat {u}}\in \mathbb {R} ^{m}}](/svg/08cfc8720ec38ec9dc0a6e904dc71b82213ab1d1.svg) (PvdA) unmittelbar die Bewegungsgleichung:
(PvdA) unmittelbar die Bewegungsgleichung:
 |
|
(*) |
|
|
Des Weiteren soll im Folgenden jede Abhängigkeit von den Geschwindigkeiten, wie sie bei viskosen Materialien oder geschwindigkeitsabhängigen Kräften vorliegt, der Einfachheit halber vernachlässigbar sein.
Verschiebungen und Beschleunigungen
In der Matrizengleichung  (*) kommen die Knotenbeschleunigungen
(*) kommen die Knotenbeschleunigungen  vor, aber in der Verschiebungsmethode sind die Verschiebungen die primären
Unbekannten. Hier soll geklärt werden, wie aus den Verschiebungen standardmäßig
die Beschleunigungen ermittelt werden.
vor, aber in der Verschiebungsmethode sind die Verschiebungen die primären
Unbekannten. Hier soll geklärt werden, wie aus den Verschiebungen standardmäßig
die Beschleunigungen ermittelt werden.
Die Beschleunigungen sind die zweite Ableitung der Verschiebungen nach der
Zeit und daher sind die Beschleunigungen und Verschiebungen nicht voneinander
unabhängig, vielmehr kann die eine aus der anderen über Zeitintegration oder
-ableitung berechnet werden. Üblicherweise werden für die Zeitintegration Einschrittverfahren
eingesetzt, in denen die Verschiebungen und Beschleunigungen zur Zeit  aus zur Zeit
aus zur Zeit  bekannten Werten berechnet werden. Weit verbreitet sind vor allem zwei
Zeitintegrationsverfahren:
bekannten Werten berechnet werden. Weit verbreitet sind vor allem zwei
Zeitintegrationsverfahren:
Im Newmark-beta-Verfahren sollen hier die Verschiebungen als primäre Unbekannte benutzt werden, die gemäß
 |
|
(NbV) |
|
|
Beschleunigungen bewirken. Der Parameter  kommt aus dem Integrationsalgorithmus und der Vektor
kommt aus dem Integrationsalgorithmus und der Vektor  ist zur Zeit
bekannt.[1]
In der expliziten Zeitintegration ist
ist zur Zeit
bekannt.[1]
In der expliziten Zeitintegration ist
 |
|
(EZI) |
|
|
Der Skalar  ist auch ein Parameter des Integrationsalgorithmus und der Vektor
ist auch ein Parameter des Integrationsalgorithmus und der Vektor  ist zur Zeit
bekannt.[2]
ist zur Zeit
bekannt.[2]
Diese Ergebnisse werden bei der Lösung der Matrizengleichungen benötigt.
Anwendungen
Linearer Fall
Im linearen Fall hängen die Spannungen  linear von den Knotenverschiebungen (aber nach Voraussetzung nicht von
den Geschwindigkeiten) ab:
linear von den Knotenverschiebungen (aber nach Voraussetzung nicht von
den Geschwindigkeiten) ab:

Der Vektor  enthält Eigenspannungen und die Stoffmatrix
enthält Eigenspannungen und die Stoffmatrix  ist bei Linearität von den Verzerrungen und damit von den Knotenverschiebungen
unabhängig. Die Verzerrungen sind ebenfalls linear in den Verschiebungen
ist bei Linearität von den Verzerrungen und damit von den Knotenverschiebungen
unabhängig. Die Verzerrungen sind ebenfalls linear in den Verschiebungen  was auch für die virtuellen Verzerrungen gilt. Damit berechnen sich die
Reaktionen zu
was auch für die virtuellen Verzerrungen gilt. Damit berechnen sich die
Reaktionen zu

Die lineare Steifigkeitsmatrix KL ist von den Verschiebungen
unabhängig. Einsetzen in die Bewegungsgleichung
(*) liefert zu einer Zeit tn+1 die Bestimmungsgleichung für die
Knotenverschiebungen:

Diese lineare Gleichung mit von den Verzerrungen unabhängiger Massenmatrix
 und Steifigkeitsmatrix
und Steifigkeitsmatrix  kann in den Modalraum
übertragen werden, mit einem Resultat wie im Bild.
kann in den Modalraum
übertragen werden, mit einem Resultat wie im Bild.
In dem im Newmark-beta-Verfahren die Beschleunigungen mit den Verschiebungen
gemäß
[1]
ausgedrückt werden, kann in jedem Zeitschritt die Verschiebung berechnet werden:

Ist nur die Gleichgewichtslage mit  gesucht, ergeben sich die Verschiebungen aus
gesucht, ergeben sich die Verschiebungen aus

Auch wenn im linearen Fall eine lineare Abhängigkeit der äußeren Kräfte
von den Knotenverschiebungen einfach zu berücksichtigen wäre, wird hiervon
normalerweise kein Gebrauch gemacht.
Implizite Lösung nichtlinearer Probleme
Die Knotenreaktion
in der Bewegungsgleichung
(*) hängt im nichtlinearen Fall nichtlinear von den Knotenverschiebungen
ab. Ursachen der Nichtlinearität können sein:
- Materielle Nichtlinearität
- Plastizität, nichtlineare Elastizität.
- Verschiebungsabhängige Randbedingungen
- Von der Verformung abhängende Kräfte, Körperkontakt.
- Geometrische Nichtlinearität
- Große Drehungen oder Verformungen, Knicken, Beulen.
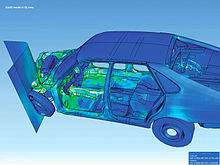
Die Animation zeigt eine geometrisch nichtlineare, implizite Analyse eines beulenden, elastoplastischen Trägers.
Um die Knotenverschiebungen zu bestimmen, wird standardmäßig das Newton-Verfahren
eingesetzt, das eine Linearisierung
der Gleichung vorsieht. Linearisierung der Reaktionen
liefert im Punkt  [3]
[3]
![{\displaystyle {\begin{aligned}{\hat {r}}({\hat {u}}^{i}+\Delta {\hat {u}})=&\int _{V}B^{\top }({\hat {u}}^{i}+\Delta {\hat {u}}){\hat {T}}({\hat {u}}^{i}+\Delta {\hat {u}})\mathrm {d} V\\[-2ex]\approx &\underbrace {\int _{V}B^{i\top }{\hat {T}}^{i}\mathrm {d} V} _{{\hat {r}}^{i}}+\underbrace {\int _{V}{\frac {\mathrm {d} }{\mathrm {d} {\hat {u}}}}\left.(B^{i\top }{\hat {T}}^{i})\right|_{{\hat {T}}^{i}={\text{const.}}}\mathrm {d} V} _{G^{i}}\Delta {\hat {u}}+\underbrace {\int _{V}B^{i\top }\overbrace {\frac {\mathrm {d} {\hat {T}}}{\mathrm {d} {\hat {E}}}} ^{C}\overbrace {\frac {\mathrm {d} {\hat {E}}}{\mathrm {d} {\hat {u}}}} ^{B^{i}}\mathrm {d} V} _{K^{i}}\Delta {\hat {u}}\\=&{\hat {r}}^{i}+(G^{i}+K^{i})\Delta {\hat {u}}\,.\end{aligned}}}](/svg/0dd3f822805808452a366b8c91e1ca871d8e92a4.svg)
Die mit dem Superskript  gekennzeichneten Größen können von den Verschiebungen
gekennzeichneten Größen können von den Verschiebungen  abhängen. Die B-Matrix tut das nur im geometrisch nichtlinearen Fall und nur in
diesem Fall muss also die geometrische Steifigkeitsmatrix
abhängen. Die B-Matrix tut das nur im geometrisch nichtlinearen Fall und nur in
diesem Fall muss also die geometrische Steifigkeitsmatrix  aufgestellt werden.
aufgestellt werden.
Bei verschiebungsabhängigen äußeren Kräften wird auch der Knotenkraftvektor
linearisiert[3]

was auf eine m×m Matrix Fi führt. In dynamischen Systemen bewirkt
das Verschiebungsinkrement auch ein Beschleunigungsinkrement:  [1]
Einsetzen dieser Resultate in die Bewegungsgleichung
(*) liefert mit der Abkürzung
[1]
Einsetzen dieser Resultate in die Bewegungsgleichung
(*) liefert mit der Abkürzung 
 |
|
(I) |
|
|
Ist nur die Gleichgewichtslage mit
gesucht, reduziert sich das auf
 |
|
(II) |
|
|
Die Knotenverschiebungen zu einem Zeitpunkt
werden aus den zur Zeit
bekannten Knotenverschiebungen und -beschleunigungen anhand des folgenden
Schemas berechnet. Das Schema kann auch im statischen Fall angewendet werden.
Dort verschwinden zwar die Beschleunigungen und die Zeit hat lediglich eine
ordnende Funktion für die aufeinander folgenden Gleichgewichtslagen. Auf das
Schema hat das aber keinen Einfluss.
- Die gesuchte Lösung
 wird mit den bekannten Verschiebungen im letzten Inkrement
wird mit den bekannten Verschiebungen im letzten Inkrement  (oder dem Nullvektor) und der Iterationszähler mit i=0 initialisiert. In
dynamischen Systemen wird die Massenmatrix
bereitgestellt. Im Allgemeinen (hier nicht) werden die Randbedingungen in den
Lösungsvektor eingetragen und in einen bekannten und einen unbekannten Teil
partitioniert.
(oder dem Nullvektor) und der Iterationszähler mit i=0 initialisiert. In
dynamischen Systemen wird die Massenmatrix
bereitgestellt. Im Allgemeinen (hier nicht) werden die Randbedingungen in den
Lösungsvektor eingetragen und in einen bekannten und einen unbekannten Teil
partitioniert. - Die Matrix
 und das Residuum
und das Residuum
 werden mit der vorliegenden Näherungslösung
werden mit der vorliegenden Näherungslösung  aufgestellt.
aufgestellt. - Mit Gleichungen (I) oder (II) wird das Inkrement
 berechnet.
berechnet. - Fallen geeignete Normen
der Vektoren
und
unter eine vorgegebene Schranke,
wird die Näherungslösung
akzeptiert und in den Lösungsvektor
übertragen und – falls gewünscht – die Beschleunigungen
 berechnet[1].
Den Elementen wird Gelegenheit gegeben ihre inneren Variablen zu aktualisieren
(siehe #Tangentenoperator
C). Der Zähler
berechnet[1].
Den Elementen wird Gelegenheit gegeben ihre inneren Variablen zu aktualisieren
(siehe #Tangentenoperator
C). Der Zähler  wird inkrementiert und in Schritt 1 fortgefahren oder die Analyse
beendet.
wird inkrementiert und in Schritt 1 fortgefahren oder die Analyse
beendet. - Falls die Normen der Vektoren
oder
jedoch inakzeptabel sind, wird die Näherungslösung mittels
 aktualisiert, der Zähler
aktualisiert, der Zähler  inkrementiert und im Schritt 2 fortgefahren.
inkrementiert und im Schritt 2 fortgefahren.
Explizite Lösung nichtlinearer Probleme
Im Fall der expliziten Zeitintegration ist die Bewegungsgleichung
(*) bereits die Bestimmungsgleichung für die einzige Unbekannte  denn die Vektoren
und
werden aus zur Zeit
bekannten Größen berechnet:
denn die Vektoren
und
werden aus zur Zeit
bekannten Größen berechnet:

Aus den Beschleunigungen werden die Geschwindigkeiten und Verschiebungen für
die Berechnung der Reaktionskräfte
für das nächste Inkrement ermittelt, siehe explizite
Zeitintegration im Vergleich zum Newmark-beta-Verfahren. Eine weitere
Vereinfachung wird durch Diagonalisierung
der Massenmatrix
erreicht ( engl. "lumped mass matrix" ), so dass

besonders schnell ausgewertet werden kann. Das ist auch nötig, denn dieses
Verfahren ist nur unterhalb einer kritischen Zeitschrittweite  stabil, die sich gemäß der Courant-Friedrichs-Lewy-Bedingung
danach bemisst, wie lange ein Signal braucht, um von einem Knoten zum nächsten
zu gelangen. Ist der minimale Knotenabstand
stabil, die sich gemäß der Courant-Friedrichs-Lewy-Bedingung
danach bemisst, wie lange ein Signal braucht, um von einem Knoten zum nächsten
zu gelangen. Ist der minimale Knotenabstand  berechnet sich bei Stahlbauteilen mit einem Elastizitätsmodul
berechnet sich bei Stahlbauteilen mit einem Elastizitätsmodul
 (Megapascal)
und einer Dichte
(Megapascal)
und einer Dichte
 :
:

worin  die Wellenausbreitungsgeschwindigkeit
in Stahl ist. Bei diesen in der Praxis üblichen Werten liegt die kritische
Zeitschrittweite also im Bereich von Mikrosekunden. Für
Zehntelsekunden andauernde Bewegungen sind daher oftmals zehntausende
Zeitschritte zu berechnen. Vorteilhaft ist, dass Nichtlinearitäten ohne
Linearisierung berücksichtigt werden können, weshalb dieses Verfahren bei
nichtlinearen, dynamischen und kurzzeitigen Vorgängen wie Crashtestsimulationen
eingesetzt wird, siehe Bild. Ein weiterer Vorteil ist, dass der Aufwand für die
Berechnung der Beschleunigungen nur linear mit der Dimension des Lösungsvektors
steigt, so dass sich dieses Verfahren auch für sehr große Probleme unter quasi
statischen Bedingungen anbietet.
die Wellenausbreitungsgeschwindigkeit
in Stahl ist. Bei diesen in der Praxis üblichen Werten liegt die kritische
Zeitschrittweite also im Bereich von Mikrosekunden. Für
Zehntelsekunden andauernde Bewegungen sind daher oftmals zehntausende
Zeitschritte zu berechnen. Vorteilhaft ist, dass Nichtlinearitäten ohne
Linearisierung berücksichtigt werden können, weshalb dieses Verfahren bei
nichtlinearen, dynamischen und kurzzeitigen Vorgängen wie Crashtestsimulationen
eingesetzt wird, siehe Bild. Ein weiterer Vorteil ist, dass der Aufwand für die
Berechnung der Beschleunigungen nur linear mit der Dimension des Lösungsvektors
steigt, so dass sich dieses Verfahren auch für sehr große Probleme unter quasi
statischen Bedingungen anbietet.
Elementmatrizen an den Integrationspunkten
Die Integrale, die im Prinzip von d’Alembert in der Lagrangeschen Fassung vorkommen, können im allgemeinen Anwendungsfall nicht exakt integriert werden. Stattdessen werden die Volumenintegrale mit numerischen Integrationsverfahren wie der Gauß-Quadratur berechnet, bei der das Integral als Summe gewichteter Integranden an Integrationspunkten angenähert wird.
In diesem Abschnitt werden die oben auftretenden Matrizen, die an jedem Integrationspunkt aufzubauen sind, angegeben.
Formfunktionen N und ihre Ableitungen
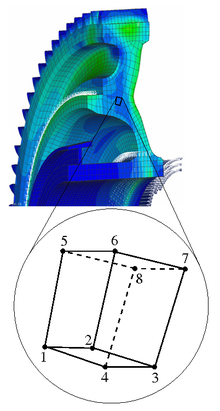
Jedes Element modelliert ein von den Knoten aufgespanntes dreidimensionales
Volumen des Körpers. Das Bild zeigt als Illustration ein acht knotiges
Hexaeder-Element als Teilkörper eines Zahnrades. Die Koordinaten  der Punkte im Element werden mit Formfunktionen
der Punkte im Element werden mit Formfunktionen  in Abhängigkeit von lokalen Koordinaten
in Abhängigkeit von lokalen Koordinaten
![\vec{\Theta}=\begin{pmatrix}\xi\\\eta\\\zeta\end{pmatrix}\in [-1,1]^{3}](/svg/d9bbf9cbc2fd0874163ded49155f9945817f8a76.svg)
zwischen den k Knoten des Elementes interpoliert:

Der 3k × 1 Vektor  enthält alle Komponenten der Knotenkoordinaten
enthält alle Komponenten der Knotenkoordinaten 

und die 3 × 3k Matrix

die Formfunktionen  Das Argument
Das Argument  der Formfunktionen wurde hier der Übersichtlichkeit halber weggelassen und das
soll auch im Folgenden geschehen.
der Formfunktionen wurde hier der Übersichtlichkeit halber weggelassen und das
soll auch im Folgenden geschehen.
Die Ableitung der Formfunktionen nach den globalen Koordinaten  wird mit der Jacobi-Matrix
wird mit der Jacobi-Matrix
 berechnet:
berechnet:

Ein Index  nach einem Komma bedeutet hier wie im Folgenden eine Ableitung nach der
Variablen
nach einem Komma bedeutet hier wie im Folgenden eine Ableitung nach der
Variablen  Die Matrix
Die Matrix  ist die transponiert inverse
Jacobimatrix. Weil die Invertierung der Jacobimatrix bei der
Koordinatentransformation immer gelingt und die Ableitung nach den lokalen
Koordinaten
ist die transponiert inverse
Jacobimatrix. Weil die Invertierung der Jacobimatrix bei der
Koordinatentransformation immer gelingt und die Ableitung nach den lokalen
Koordinaten  analytisch machbar ist, ergeben sich aus der rechten Gleichung die gesuchten
Ableitungen nach den globalen Koordinaten. Mit der Determinante
der Jacobimatrix werden die für die Integration benötigten vektoriellen Oberflächenelemente
und Volumenformen umgerechnet:
analytisch machbar ist, ergeben sich aus der rechten Gleichung die gesuchten
Ableitungen nach den globalen Koordinaten. Mit der Determinante
der Jacobimatrix werden die für die Integration benötigten vektoriellen Oberflächenelemente
und Volumenformen umgerechnet:

Hier wurde beispielhaft eine durch die Koordinaten X und Y beschreibbare
Fläche  angenommen.
angenommen.
Verschiebungen und ihr Gradient H
Der Verschiebungsvektor wird in isoparametrischen Elementen analog zum Ortsvektor interpoliert:

Der 3k × 1 Vektor
enthält die Verschiebungskomponenten  und
und  in x-, y- bzw. z-Richtung an den Knoten
in x-, y- bzw. z-Richtung an den Knoten

Es wird noch der Verschiebungsgradient erstellt[3]

Die Ableitungen der Verschiebungskomponenten werden mit den abgeleiteten Formfunktionen berechnet, z.B.

In der Galerkin-Methode werden die virtuellen Verschiebungen, die im Prinzip von d’Alembert vorkommen, genauso behandelt wie die Knotenverschiebungen:

Verzerrungsverschiebungsmatrix B
Der symmetrische Green-Lagrange-Verzerrungstensor ergibt sich aus dem Verschiebungsgradient gemäß

Seine sechs unabhängigen Komponenten werden in einen Vektor eingetragen (Voigtsche Notation):

Die Verzerrungsverschiebungsmatrix  ist die Ableitung[3]
des Vektors
ist die Ableitung[3]
des Vektors  nach den Knotenverschiebungen:
nach den Knotenverschiebungen:

Die differenziellen virtuellen Verzerrungen  ergeben sich dann mit der B-Matrix aus den virtuellen Knotenverschiebungen
ergeben sich dann mit der B-Matrix aus den virtuellen Knotenverschiebungen  :
:

Geometrisch linearer Fall
Im geometrisch linearen Fall sind die Verzerrungen

linear in den Knotenverschiebungen, weshalb sich die B-Matrix durch "Ausklammern" der Knotenverschiebungen ergibt und die übersichtliche Form

besitzt. Dann gilt: 
Geometrisch nichtlinearer Fall
Im geometrisch nichtlinearen Fall muss zur geometrisch linearen B-Matrix
 noch ein Anteil aus
noch ein Anteil aus

addiert werden, der auf die Matrix

mit den Blöcken

führt. Die resultierende B-Matrix

ist in diesem Fall von den Knotenverschiebungen
abhängig.
Tangentenoperator C
Die Spannungen werden wie die Dehnungen in einen Vektor eingetragen
Auf Elementebene muss eine Materialroutine  diese Spannungen aus Spannungen
diese Spannungen aus Spannungen  im letzten Zeitschritt
im letzten Zeitschritt  einem Verzerrungsinkrement
einem Verzerrungsinkrement  und eventuell weiteren inneren Variablen
und eventuell weiteren inneren Variablen  des Materialmodells berechnen:
des Materialmodells berechnen:

Bei linearer Elastizität sind die Spannungen linear in den Verzerrungen  Die 6×6 Matrix
ist dann die von den Verzerrungen unabhängige Elastizitätsmatrix. Für die
Anwendung des Newton-Verfahrens bei der Berechnung von Problemen mit
nichtlinearem Materialverhalten muss die Ableitung der Spannungen nach den
Verzerrungen bereitgestellt werden, was auf den konsistenten
Tangentenoperator
Die 6×6 Matrix
ist dann die von den Verzerrungen unabhängige Elastizitätsmatrix. Für die
Anwendung des Newton-Verfahrens bei der Berechnung von Problemen mit
nichtlinearem Materialverhalten muss die Ableitung der Spannungen nach den
Verzerrungen bereitgestellt werden, was auf den konsistenten
Tangentenoperator  führt, der ebenfalls eine 6×6 Matrix ist. Bei linearer Elastizität ist
führt, der ebenfalls eine 6×6 Matrix ist. Bei linearer Elastizität ist  Der Tangentenoperator ergibt sich aus der Ableitung
der Spannungen nach den Verzerrungen an der Stelle der aktuellen Spannungen
Der Tangentenoperator ergibt sich aus der Ableitung
der Spannungen nach den Verzerrungen an der Stelle der aktuellen Spannungen
 (und inneren Variablen, deren aktueller Wert bei der Berechnung der Spannungen
anfällt):
(und inneren Variablen, deren aktueller Wert bei der Berechnung der Spannungen
anfällt):

Dann kann

geschrieben werden. Die Konsistenz bezieht sich darauf, dass der
Tangentenoperator aus der Ableitung der Materialroutine
und nicht im analytischen Materialmodell berechnet wird, das durch
numerisch umgesetzt wird.
Geometrische Steifigkeitsmatrix G
Die Geometrische Steifigkeitsmatrix

hat eine Blockstruktur mit Blöcken aus Diagonalmatrizen

und den Diagonalgliedern

Beispiel
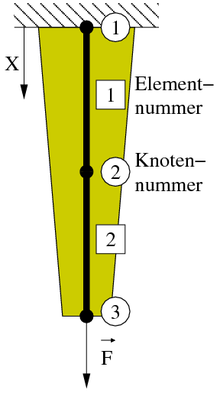
Die Längung eines einseitig eingespannten Zugstabes mit linear abnehmender Querschnittsfläche unter Einzelkraft am Ende, wie im Bild, soll berechnet werden. Dazu wird ein in x-Richtung liegendes, eindimensionales, zweiknotiges Stabelement konstruiert. Die x-Koordinate der Punkte im Stab, die Formfunktionsmatrix und Knotenkoordinaten bilden den Zusammenhang

mit ![{\displaystyle \xi \in [-1,1]\,.}](/svg/4f644c6d129082f3a8dee0d8819544d196e3c96d.svg) Die Jacobi-Matrix degeneriert zu einer Zahl:
Die Jacobi-Matrix degeneriert zu einer Zahl:

Mit ihrer Inversen berechnet sich die Ableitung der Formfunktionsmatrix:

Die Verschiebungen, die Formfunktionsmatrix und Knotenverschiebungen bilden den Zusammenhang

Im geometrisch linearen Bereich lauten die Dehnungen und die Verzerrungsverschiebungsmatrix

Von den Dehnungen gibt es hier nur eine konstante Komponente in Stabrichtung und gleiches gilt für die Spannungen:

worin von der Elastizitätsmatrix CL auch nur eine Komponente C
benötigt wird. Die Querschnittsfläche wird mit zwei Parametern a und b
beschrieben: A=a-bX. Damit wird das Volumenelement 
Jetzt können die Reaktionen berechnet werden:
![{\displaystyle {\begin{aligned}{\hat {r}}=&\int _{V}B_{L}^{\top }CB_{L}\,\mathrm {d} V{\hat {U}}=\int _{-1}^{1}{\frac {C}{L^{2}}}{\begin{pmatrix}1&-1\\-1&1\end{pmatrix}}{\frac {L}{2}}(a-bX)\,\mathrm {d} \xi {\hat {U}}\\=&\int _{-1}^{1}\left[a-{\frac {b}{2}}(R+L\xi )\right]\,\mathrm {d} \xi {\frac {C}{2L}}{\begin{pmatrix}1&-1\\-1&1\end{pmatrix}}{\hat {U}}\,.\end{aligned}}}](/svg/523b4d2437dfc0badf1d6f7af60152061bfe9f01.svg)
Das Integral berechnet sich zu
![{\displaystyle \int _{-1}^{1}\left[a-{\frac {b}{2}}(R+L\xi )\right]\,\mathrm {d} \xi =\left[a\xi -{\frac {b}{2}}\left(R\xi +L{\frac {\xi ^{2}}{2}}\right)\right]_{-1}^{1}=2\left(a-b{\frac {R}{2}}\right)=2A_{m}\,,}](/svg/3df5448fe867d91ce78260fe153e7df2a752a4ea.svg)
wenn Am die Querschnittsfläche des Stabes in der Mitte des Elementes ist. Damit steht die Steifigkeitsmatrix fest:

Die äußere Kraft berechnet sich aus einer konstanten Spannung σ am Ende des
Stabes bei 

Zwei Stabelemente halber Länge können zu einem Finite-Elemente-Modell des Stabes zusammengebaut werden. Das zweite Element ergibt sich analog zu den obigen Ausführungen mit den Knotenkoordinaten X2 und X3 und den Knotenverschiebungen U2 und U3, siehe Bild. Die Freiheitsgrade am Knoten 2 teilen sich beide Elemente. Assemblierung beider Elementbeiträge ergibt:

Die hochgestellten Indizes geben die Elementnummer an, also keine Potenzierung. Die
Elementparameter  ergeben sich aus den Knotenkoordinaten und den Definitionen für Am
und L. Indem U1 gleich Null gesetzt wird und eine Kraft F am dritten
Knoten angreift berechnen sich die Verschiebungen des zweiten und dritten
Knotens aus der Matrizengleichung
ergeben sich aus den Knotenkoordinaten und den Definitionen für Am
und L. Indem U1 gleich Null gesetzt wird und eine Kraft F am dritten
Knoten angreift berechnen sich die Verschiebungen des zweiten und dritten
Knotens aus der Matrizengleichung

Mit den Parametern in der Tabelle unten berechnet sich U2=0,032 und U3=0,109. In analoger Weise können prinzipiell beliebig viele Stabelemente kombiniert werden.
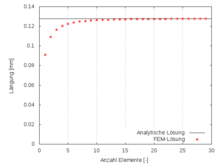
Für das Problem gibt es auch eine analytische Lösung. Die Dehnung im Stab ergibt sich – genauso wie im Element – aus ε=u,X und die Spannungen sind dazu proportional: σ=C ε=C u,X. Die Längskraft im Stab ist konstant gleich der Zugkraft, verteilt sich aber auf eine abnehmende Querschnittsfläche: F=(a-bX) σ=C(a-bX) u,X. Diese Differentialgleichung kann mit der Randbedingung u(0)=0 eindeutig gelöst werden:

Im Bild rechts ist diese analytische Lösung für die Verschiebung am Ende des Stabes bei X=L mit der FEM-Lösung unter Verwendung der in der Tabelle benutzten Parameter und variabler Elementezahl aufgetragen.
| Parameter | L | a | b | C | F |
|---|---|---|---|---|---|
| Einheit | mm | mm2 | mm | MPa | N |
| Wert | 1000 | 100 | 0,09 | 200.000 | 1000 |
Die Konvergenz der FEM-Lösung gegen einen Grenzwert bei zunehmender Netzverfeinerung hat hier einen typischen Verlauf. Er resultiert daraus, dass das Stabelement eine über die Länge konstante Dehnung und Spannung aufweist, die Spannung im Stab aber aufgrund der abnehmenden Querschnittsfläche kontinuierlich zunimmt. Die Annäherung dieses glatten, monoton steigenden Verlaufs durch eine Treppenfunktion im FE-Modell ist immer genauer, je kleiner die Treppenstufen und damit je kleiner die Elemente sind.
Fußnoten
- ↑ a
b
c
d
Vergleich der Gleichung
(NbV)
mit der Vorschrift für die Aktualisierung der Variablen
ergibt:
 und
und 
- ↑
Vergleich der Gleichung
(EZI)
mit der Vorschrift für die Aktualisierung der Variablen
ergibt:
 und
und 
- ↑ a
b
c
d
Die Ableitung eines n1×1 Vektors y
nach einem n2×1 Vektor x ist die n1×n2 Matrix
Z mit den Einträgen
 geschrieben.
geschrieben.



Literatur
- Klaus-Jürgen Bathe: Finite-Elemente-Methoden: Matrizen und lineare Algebra, die Methode der finiten Elemente, Lösung von Gleichgewichtsbedingungen und Prinzipgleichungen. Springer, 1986, ISBN 3-540-15602-X.
- Peter Wriggers: Nichtlineare Finite-Element-Methoden. Springer, 2001, ISBN 3-540-67747-X.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.02. 2021