Strecktensor
Strecktensoren oder Deformationstensoren sind einheitenfreie Tensoren (bestimmte mathematische Objekte der linearen Algebra) zweiter Stufe, die lokale Distanzänderungen von Materieelementen bei einer Deformation eines Körpers bemessen. Distanzänderungen von Materieelementen entsprechen der Streckung bzw. Stauchung der materiellen Linien, die die betrachteten Materieelemente verbinden. Diese Änderungen der inneren Anordnung korrespondieren mit einer Änderung der äußeren Gestalt des Festkörpers und werden beispielsweise als Dehnung oder Stauchung sichtbar.
Die Strecktensoren sind eine wesentliche Größe in der Beschreibung der Kinematik der Deformation und in der Kontinuumsmechanik werden eine Reihe von verschiedenen Strecktensoren definiert, die ihrerseits der Definition von Verzerrungstensoren dienen. In einigen Materialmodellen der Hyperelastizität werden Strecktensoren direkt eingesetzt.
Streckung von Linienelementen
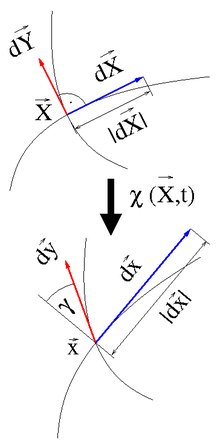
Bei der quantitativen Beurteilung einer Deformation eines Körpers werden
materielle Linien des Körpers vor und nach Deformation miteinander verglichen.
In der Praxis können dazu Dehnungsmessstreifen
(DMS) auf dem Körper aufgeklebt werden. Die Richtung des DMS wird mathematisch
mit einem materiellen Linienelement  in der undeformierten Ausgangskonfiguration und
in der undeformierten Ausgangskonfiguration und  in der deformierten Momentankonfiguration beschrieben, siehe Abbildung rechts.
Diese Linienelemente stehen in linearer Näherung über den Deformationsgradient
in der deformierten Momentankonfiguration beschrieben, siehe Abbildung rechts.
Diese Linienelemente stehen in linearer Näherung über den Deformationsgradient
 in Beziehung:
in Beziehung:

Die Streckung  eines Linienelementes in der Richtung
eines Linienelementes in der Richtung

ist das Verhältnis

Der Strecktensor

heißt rechter Cauchy-Green Tensor und ist demnach ein Maß für die
Streckung von Linienelementen. Das Superskript „ “
steht für die Transposition.
In Richtung der Eigenvektoren
von
“
steht für die Transposition.
In Richtung der Eigenvektoren
von  sind die Streckungen extremal. In der deformierten Lage berechnet sich die
Streckung aus
sind die Streckungen extremal. In der deformierten Lage berechnet sich die
Streckung aus

Der Cauchysche Strecktensor

ist also ein räumliches Maß für die Streckung von Linienelementen.
Streckung von Normalvektoren
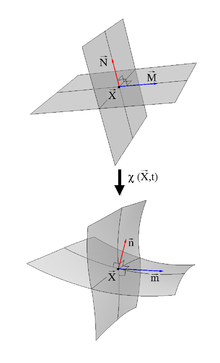
Mit Strecktensoren kann auch die Streckung von Normalvektoren ermittelt werden. Eine Familie von Flächen kann durch eine skalare Funktion

und einen Flächenparameter  definiert werden.
definiert werden.
Die Normalenvektoren an diese Flächen sind die Gradienten

Diese hängen mit der Normale in der Referenzkonfiguration wie folgt zusammen:

Das Rechenzeichen  bezeichnet das dyadische
Produkt. Die Streckung der Normalvektoren in der deformierten und
undeformierten Lage in einem materiellen Punkt
bezeichnet das dyadische
Produkt. Die Streckung der Normalvektoren in der deformierten und
undeformierten Lage in einem materiellen Punkt  führt auf den Finger-Tensor
führt auf den Finger-Tensor

der also ein Maß für die Streckung der materiellen Flächennormalen ist. Der Finger-Tensor operiert in der Ausgangskonfiguration.
Sein Gegenstück in der Momentankonfiguration ist der linke Cauchy-Green Tensor

für den

abgeleitet werden kann.
Hauptinvarianten des rechten Cauchy-Green Tensors
Bei einer Deformation werden die materiellen Linien-, Flächen- und Volumenelemente mit dem Deformationsgradient von der Ausgangskonfiguration in die Momentankonfiguration transformiert

Der Kofaktor des Deformationsgradienten ist seine transponierte Adjunkte:

Es zeigt sich, dass die Hauptinvarianten des rechten Cauchy-Green Tensors Maße für die Änderung der Linien-, Flächen- und Volumenelemente sind:

Die Frobeniusnorm
 wird mit dem Frobenius-Skalarprodukt
„:“ von Tensoren definiert:
wird mit dem Frobenius-Skalarprodukt
„:“ von Tensoren definiert:

Physikalische Interpretation
Der Zusammenhang zwischen dem rechten Cauchy-Green Tensor und der Änderung der Linien-, Flächen- und Volumenelemente macht sich makroskopisch bemerkbar.
Sei

die Bewegungsfunktion der Partikel eines materiellen Körpers. Die
materiellen Koordinaten
nehmen die Partikel zu einer bestimmten Zeit  ein, zu der der Körper in seiner undeformierten Ausgangslage vorliegt. Der
zeitabhängige Vektor
ein, zu der der Körper in seiner undeformierten Ausgangslage vorliegt. Der
zeitabhängige Vektor  bezeichnet die räumlichen Koordinaten, die die Partikel bei ihrer
Bewegung – inklusive Deformation – zur Zeit t einnehmen.
bezeichnet die räumlichen Koordinaten, die die Partikel bei ihrer
Bewegung – inklusive Deformation – zur Zeit t einnehmen.
Längen von Linien
Wenn im undeformierten Ausgangszustand eine materielle Linie  mit dem Kurvenparameter
mit dem Kurvenparameter ![s\in [0,1]](/svg/aff1a54fbbee4a2677039524a5139e952fa86eb9.svg) markiert wird, ergibt sich die Länge der Linie zu
markiert wird, ergibt sich die Länge der Linie zu

Darin ist  der Einheitstensor.
In der deformierten Lage verändert sich diese Länge zu
der Einheitstensor.
In der deformierten Lage verändert sich diese Länge zu

Die Änderung der Länge der markierten Linie wird also vom Strecktensor
bestimmt.
Flächeninhalte
Wenn in gleicher Weise im undeformierten Ausgangszustand eine materielle
Fläche  mit den Flächenparametern
mit den Flächenparametern ![(u,v)\in [0,1]^{2}](/svg/bfb3a3f028eed9d8d5ac42fd0b842c732ba13c6d.svg) bezeichnet wird, ergibt sich der Inhalt der Fläche zu
bezeichnet wird, ergibt sich der Inhalt der Fläche zu

In der deformierten Lage verändert sich diese Fläche zu

Die Inhaltsänderung der markierten Fläche wird also vom Kofaktor des
Strecktensors
bestimmt.
Volumina
Im undeformierten Ausgangszustand wird ein materielles Volumen  mit den Ortsparametern
mit den Ortsparametern ![(\xi ,\eta ,\zeta )\in [0,1]^{3}](/svg/f46e221710afb9d70ec9113d8f012b78a0836998.svg) markiert. Das Volumen berechnet sich dann zu
markiert. Das Volumen berechnet sich dann zu

In der deformierten Lage verändert sich dieses Volumen zu
![{\displaystyle {\begin{array}{rcl}v&=&\displaystyle \int _{0}^{1}\int _{0}^{1}\int _{0}^{1}\operatorname {det} {\begin{pmatrix}{\frac {\mathrm {d} {\vec {x}}}{\mathrm {d} \xi }}&{\frac {\mathrm {d} {\vec {x}}}{\mathrm {d} \eta }}&{\frac {\mathrm {d} {\vec {x}}}{\mathrm {d} \zeta }}\end{pmatrix}}\,\mathrm {d} \xi \mathrm {d} \eta \mathrm {d} \zeta =\int _{0}^{1}\int _{0}^{1}\int _{0}^{1}\operatorname {det} {\begin{pmatrix}\mathbf {F} \cdot {\frac {\mathrm {d} {\vec {X}}}{\mathrm {d} \xi }}&\mathbf {F} \cdot {\frac {\mathrm {d} {\vec {X}}}{\mathrm {d} \eta }}&\mathbf {F} \cdot {\frac {\mathrm {d} {\vec {X}}}{\mathrm {d} \zeta }}\end{pmatrix}}\,\mathrm {d} \xi \mathrm {d} \eta \mathrm {d} \zeta \\&=&\displaystyle \int _{0}^{1}\int _{0}^{1}\int _{0}^{1}\operatorname {det} \left[\mathbf {F} \cdot {\begin{pmatrix}{\frac {\mathrm {d} {\vec {X}}}{\mathrm {d} \xi }}&{\frac {\mathrm {d} {\vec {X}}}{\mathrm {d} \eta }}&{\frac {\mathrm {d} {\vec {X}}}{\mathrm {d} \zeta }}\end{pmatrix}}\right]\,\mathrm {d} \xi \mathrm {d} \eta \mathrm {d} \zeta =\int _{0}^{1}\int _{0}^{1}\int _{0}^{1}\operatorname {det} (\mathbf {F} )\,\mathrm {d} V=\int _{0}^{1}\int _{0}^{1}\int _{0}^{1}{\sqrt {\operatorname {det} (\mathbf {C} )}}\,\mathrm {d} V\,,\end{array}}}](/svg/ac1a64ad6cf3dc584c7e09196acc80404056779c.svg)
worin der Determinantenproduktsatz ausgenutzt wurde. Die Volumenänderung kann also wie bei den materiellen Linien und Flächen mit dem Strecktensor ausgedrückt werden.
Linker und rechter Strecktensor und Drehungen
Bei Nicht-Deformation sind die Strecktensoren gleich dem Einheitstensor und das unabhängig von eventuell auftretenden Drehungen des Körpers. Der Grund hierfür liegt in der Polarzerlegung des Deformationsgradienten

die die Deformation lokal in eine Drehung, vermittelt durch den orthogonalen
Rotationstensor  (mit
(mit  und der Determinante
und der Determinante
 ),
und eine reine Streckung, vermittelt durch die symmetrischen positiv
definiten rechten bzw. linken Strecktensoren
),
und eine reine Streckung, vermittelt durch die symmetrischen positiv
definiten rechten bzw. linken Strecktensoren  bzw.
bzw.  ,
aufspaltet. Durch die Multiplikation des Deformationsgradienten mit seiner transponierten
heben sich die Drehungen
und "Rückdrehungen"
gegenseitig auf:
,
aufspaltet. Durch die Multiplikation des Deformationsgradienten mit seiner transponierten
heben sich die Drehungen
und "Rückdrehungen"
gegenseitig auf:

was natürlich auch für die Inversen des rechten und linken Cauchy-Green-Tensors zutrifft. Der rechte und linke Cauchy-Green-Tensor und ihre Inversen sind daher von Drehungen des Körpers unbeeinflusst.
Hauptachsentransformationen
Der rechte und linke Strecktensor ebenso wie der rechte und linke
Cauchy-Green-Tensor sind also ähnlich,
weswegen sie dieselben Eigenwerte
und daher auch dieselben Hauptinvarianten
besitzen. Die Eigenwerte der Strecktensoren werden Hauptstreckungen
genannt. Sämtliche Strecktensoren sind symmetrisch positiv definit und daher
sind alle drei Eigenwerte positiv und die drei Eigenvektoren sind paarweise
zueinander senkrecht (oder orthogonalisierbar), so dass sie eine Orthonormalbasis
bilden. Seien  die Eigenvektoren von ,
die Eigenvektoren von ,
 die Eigenvektoren von
und
die Eigenvektoren von
und  dessen Eigenwerte. Dann lauten die Hauptachsentransformationen:
dessen Eigenwerte. Dann lauten die Hauptachsentransformationen:

Aus  folgt:
folgt:

und weiter:





Ableitung der Streckungen
Manche Materialmodelle der Hyperelastizität
beinhalten Funktionen der Eigenwerte  des linken Strecktensors
und die Spannungen ergeben sich aus der Ableitung dieser Funktionen nach dem
linken Cauchy-Green-Tensor
des linken Strecktensors
und die Spannungen ergeben sich aus der Ableitung dieser Funktionen nach dem
linken Cauchy-Green-Tensor  .
Deshalb lohnt es sich, die Ableitung der Eigenwerte
nach dem Strecktensor
bereitzustellen[1].
Es ergibt sich
.
Deshalb lohnt es sich, die Ableitung der Eigenwerte
nach dem Strecktensor
bereitzustellen[1].
Es ergibt sich

Entsprechend berechnet sich

| Beweis |
Betrachtet werden zunächst die Eigenwerte  des linken Cauchy-Green-Tensors. Die Eigenwerte
des linken Cauchy-Green-Tensors. Die Eigenwerte  lösen das charakteristische Polynom des linken Cauchy-Green-Tensors:
lösen das charakteristische Polynom des linken Cauchy-Green-Tensors:
|





 die mit den Eigenvektoren des linken Strecktensors übereinstimmen, und der
Form
die mit den Eigenvektoren des linken Strecktensors übereinstimmen, und der
Form  des Einheitstensors ergibt beispielsweise für i=1:
des Einheitstensors ergibt beispielsweise für i=1: }{3\eta _{1}^{2}-2(\eta _{1}+\eta _{2}+\eta _{3})\eta _{1}+\eta _{1}\eta _{2}+\eta _{2}\eta _{3}+\eta _{3}\eta _{1}}}\\&+{\frac {\eta _{1}^{2}{\hat {n}}_{1}\otimes {\hat {n}}_{1}+\eta _{2}^{2}{\hat {n}}_{2}\otimes {\hat {n}}_{2}+\eta _{3}^{2}{\hat {n}}_{3}\otimes {\hat {n}}_{3}}{3\eta _{1}^{2}-2(\eta _{1}+\eta _{2}+\eta _{3})\eta _{1}+\eta _{1}\eta _{2}+\eta _{2}\eta _{3}+\eta _{3}\eta _{1}}}\\=&{\hat {n}}_{1}\otimes {\hat {n}}_{1}\end{aligned}}}](/svg/96ed6332daab42eb41a9e836c86a23759cf6a17e.svg)


Beispiel
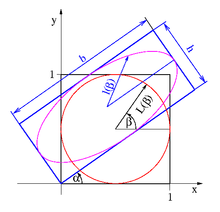
Ein Quadrat der Seitenlänge eins wird zu einem Rechteck mit Breite  und Höhe
und Höhe  gestreckt und um einen Winkel
gestreckt und um einen Winkel  verdreht, siehe die Abbildung rechts. Das Quadrat sei im Ursprung eines
kartesischen Koordinatensystems positioniert, so dass für die Punkte des
Quadrates
verdreht, siehe die Abbildung rechts. Das Quadrat sei im Ursprung eines
kartesischen Koordinatensystems positioniert, so dass für die Punkte des
Quadrates
![{\vec {X}}=\left({\begin{array}{c}X\\Y\end{array}}\right)\in {[{0,1}]}^{{2}}](/svg/8b011e853b60af540637e22e98c8274c026e2884.svg)
gilt. Im deformierten Zustand ist dann

Damit berechnen sich der Deformationsgradient und die Strecktensoren zu

In der Mitte des Quadrates wird eine gerade Linie der Länge ½ in einem Winkel
 zur x-Achse markiert, siehe Abbildung. Die Punkte auf der Linie haben in der
Ausgangslage dann für
zur x-Achse markiert, siehe Abbildung. Die Punkte auf der Linie haben in der
Ausgangslage dann für ![s\in [{0,1}]](/svg/ca70db75212a08e3912c54b2e74735f4f8dd6074.svg) die Koordinaten:
die Koordinaten:

Die Länge der Linie ist definitionsgemäß unabhängig von deren Richtung:

In der deformierten Lage haben die Punkte die Koordinaten

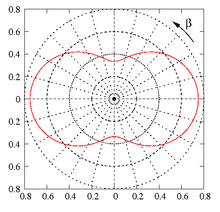
 der Linien im deformierten Quadrat in Abhängigkeit vom Winkel .
der Linien im deformierten Quadrat in Abhängigkeit vom Winkel .weswegen sich die Länge der Linie zu

verändert. Das Ergebnis ist wiederum unabhängig vom Drehwinkel .
Bei Flächengleichheit des Quadrates und des Rechtecks ist

und die Längen der deformierten Linie bilden in einem Polardiagramm eine
Kurve wie in der Abbildung rechts. Dort ist  .
.
Siehe auch
Mechanik:
Anmerkung
- ↑
Die Fréchet-Ableitung
einer skalaren Funktion
 nach einem Tensor
nach einem Tensor  ist der Tensor
ist der Tensor  für den - sofern er existiert - gilt:
für den - sofern er existiert - gilt:
 und ":" das Frobenius-Skalarprodukt.
Dann wird auch
und ":" das Frobenius-Skalarprodukt.
Dann wird auch


Literatur
- H. Altenbach: Kontinuumsmechanik. Springer, 2012, ISBN 978-3-642-24118-5.


© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 01.05. 2025