Orthogonale Gruppe
Die orthogonale Gruppe  ist die Gruppe
der orthogonalen
ist die Gruppe
der orthogonalen
 -Matrizen
mit reellen Koeffizienten. Die Verknüpfung
der orthogonalen Gruppe ist die Matrizenmultiplikation.
Bei der orthogonalen Gruppe handelt es sich um eine Lie-Gruppe
der Dimension
-Matrizen
mit reellen Koeffizienten. Die Verknüpfung
der orthogonalen Gruppe ist die Matrizenmultiplikation.
Bei der orthogonalen Gruppe handelt es sich um eine Lie-Gruppe
der Dimension
 .
Da die Determinante
einer orthogonalen Matrix nur die Werte
.
Da die Determinante
einer orthogonalen Matrix nur die Werte  annehmen kann, zerfällt
in die beiden disjunkten Teilmengen
(topologisch: Zusammenhangskomponenten)
annehmen kann, zerfällt
in die beiden disjunkten Teilmengen
(topologisch: Zusammenhangskomponenten)
- die Drehgruppe
 aller Drehungen (orthogonale Matrizen mit Determinante
aller Drehungen (orthogonale Matrizen mit Determinante  )
und
)
und  aller Drehspiegelungen (orthogonale Matrizen mit Determinante
aller Drehspiegelungen (orthogonale Matrizen mit Determinante
 ).
).
Die Untergruppe
heißt die spezielle orthogonale Gruppe. Insbesondere ist die  als die Gruppe aller Drehungen um eine durch den Koordinatenursprung verlaufende
Achse im dreidimensionalen Raum von großer Bedeutung in zahlreichen Anwendungen,
wie etwa der Computergraphik oder der Physik.
als die Gruppe aller Drehungen um eine durch den Koordinatenursprung verlaufende
Achse im dreidimensionalen Raum von großer Bedeutung in zahlreichen Anwendungen,
wie etwa der Computergraphik oder der Physik.
Orthogonale Abbildungen und Matrizen aus algebraischer Sicht
Koordinatenfreie Beschreibung
Ausgehend von einem  -dimensionalen
euklidischen
Vektorraum
-dimensionalen
euklidischen
Vektorraum  mit einem Skalarprodukt
mit einem Skalarprodukt
 definiert man: Ein Endomorphismus
definiert man: Ein Endomorphismus
 heißt orthogonal,
falls
heißt orthogonal,
falls  das Skalarprodukt erhält, also falls für alle
das Skalarprodukt erhält, also falls für alle 

gilt. Eine lineare
Abbildung erhält genau dann das Skalarprodukt, wenn sie längen- und
winkeltreu ist.[1]
Die Menge aller orthogonalen Selbstabbildungen von
heißt die orthogonale Gruppe von ,
geschrieben als  .
.
Bezüglich einer Orthonormalbasis
von
werden orthogonale Endomorphismen durch orthogonale Matrizen dargestellt.
Gleichbedeutend hierzu ist folgende Formulierung: Versieht man den  mit dem Standardskalarprodukt,
so ist die Abbildung
mit dem Standardskalarprodukt,
so ist die Abbildung  genau dann orthogonal, wenn die Matrix
genau dann orthogonal, wenn die Matrix  orthogonal ist.
orthogonal ist.
Diagonalisierbarkeit unitärer Matrizen
Jede orthogonale Matrix
ist gleichzeitig natürlich auch eine unitäre
Matrix mit reellen Koeffizienten. Damit entspricht sie einer unitären
Abbildung  Nach dem Spektralsatz
für endlich dimensionale unitäre Räume ist
als unitäre Matrix diagonalisierbar.
Die dabei auftretenden Diagonalelemente
Nach dem Spektralsatz
für endlich dimensionale unitäre Räume ist
als unitäre Matrix diagonalisierbar.
Die dabei auftretenden Diagonalelemente  mit
mit  sind genau die Eigenwerte
von .
Diese sind aber notwendig vom Betrag Eins (vgl. unitäre
Matrix). Sie lassen sich daher in der Form
sind genau die Eigenwerte
von .
Diese sind aber notwendig vom Betrag Eins (vgl. unitäre
Matrix). Sie lassen sich daher in der Form  für gewisse, bis auf die Reihenfolge eindeutige Winkel
für gewisse, bis auf die Reihenfolge eindeutige Winkel  schreiben. Da die Matrix nur reelle Koeffizienten besitzt, treten dabei die
nichtreellen Eigenwerte in Paaren zueinander konjugierter komplexer Zahlen auf.
Im Reellen ist
in der Regel nicht diagonalisierbar, jedoch lässt sich auch hier eine Zerlegung
in ein- bzw. zweidimensionale invariante Unterräume angeben.
schreiben. Da die Matrix nur reelle Koeffizienten besitzt, treten dabei die
nichtreellen Eigenwerte in Paaren zueinander konjugierter komplexer Zahlen auf.
Im Reellen ist
in der Regel nicht diagonalisierbar, jedoch lässt sich auch hier eine Zerlegung
in ein- bzw. zweidimensionale invariante Unterräume angeben.
Auswirkungen auf orthogonale Matrizen
Zu jeder orthogonalen Matrix  lässt sich eine Drehung des Koordinatensystems
lässt sich eine Drehung des Koordinatensystems  finden, so dass die Matrix
finden, so dass die Matrix  von „beinahe diagonaler“ Gestalt ist:
von „beinahe diagonaler“ Gestalt ist:

Alle hier nicht angegeben Koeffizienten haben den Wert  .
Die auftretenden
.
Die auftretenden  -Matrizen
-Matrizen
 beschreiben zweidimensionale Drehungen um die Winkel
beschreiben zweidimensionale Drehungen um die Winkel ![\varphi _{j}\in \;]0;\pi [\;\cup \;]\pi ;2\pi [](/svg/123671adb0f81a995fc2bc62d4b1005b5816e232.svg) der Form
der Form

Jedes  gehört dabei zu einem Paar konjugiert komplexer Eigenwerte
gehört dabei zu einem Paar konjugiert komplexer Eigenwerte  .
Dabei gilt natürlich
.
Dabei gilt natürlich  ,
falls
,
falls  die Anzahl der Diagonalelemente mit Wert
und
die Anzahl der Diagonalelemente mit Wert
und  die Anzahl der Diagonalelemente mit Wert
repräsentieren.
Offenbar ist
genau dann eine Drehung, wenn ,
die geometrische wie auch algebraische Vielfachheit
des Eigenwertes ,
eine gerade Zahl ist.
die Anzahl der Diagonalelemente mit Wert
repräsentieren.
Offenbar ist
genau dann eine Drehung, wenn ,
die geometrische wie auch algebraische Vielfachheit
des Eigenwertes ,
eine gerade Zahl ist.
Ebene Drehspiegelung
Neben den ebenen Drehungen, die den Matrizen  entsprechen, sind auch die Drehspiegelungen
entsprechen, sind auch die Drehspiegelungen

orthogonale Matrizen. Die Eigenwerte von  sind
sind  und ;
folglich handelt es sich um eine Achsenspiegelung die sich nach einer Drehung
des Koordinatensystems um
und ;
folglich handelt es sich um eine Achsenspiegelung die sich nach einer Drehung
des Koordinatensystems um  als
als  schreiben lässt.[2]
schreiben lässt.[2]
Räumliche Drehung
Nach der oben beschriebenen Normalform lässt sich jede Drehung im Raum durch Wahl einer geeigneten Orthonormalbasis durch eine Matrix

beschreiben, wobei mit  auch alle Sonderfälle erfasst werden. Die genannte Matrix
auch alle Sonderfälle erfasst werden. Die genannte Matrix  beschreibt eine Drehung um die
beschreibt eine Drehung um die  -Achse.
Insbesondere verfügt jede echte räumliche Drehung über eine Drehachse.
Fischer[3]
verdeutlicht dies am Beispiel eines Fußballes auf dem Anstoßpunkt: Nach dem
ersten Tor gibt es zwei sich gegenüberliegende Punkte auf dem Ball, die jetzt
exakt genauso zum Stadion ausgerichtet sind, wie zu Beginn des Spieles. Der
Winkel
-Achse.
Insbesondere verfügt jede echte räumliche Drehung über eine Drehachse.
Fischer[3]
verdeutlicht dies am Beispiel eines Fußballes auf dem Anstoßpunkt: Nach dem
ersten Tor gibt es zwei sich gegenüberliegende Punkte auf dem Ball, die jetzt
exakt genauso zum Stadion ausgerichtet sind, wie zu Beginn des Spieles. Der
Winkel  ist aufgrund des orientierungserhaltenden Charakters der zugelassenen
Transformationsmatrizen
ist aufgrund des orientierungserhaltenden Charakters der zugelassenen
Transformationsmatrizen  eindeutig festgelegt; dies geht mit der aus dem Alltag bekannten Erfahrung
einher, dass es – zumindest theoretisch – stets feststeht, in welche Richtung
man eine Schraube drehen muss, um diese fester anzuziehen.
eindeutig festgelegt; dies geht mit der aus dem Alltag bekannten Erfahrung
einher, dass es – zumindest theoretisch – stets feststeht, in welche Richtung
man eine Schraube drehen muss, um diese fester anzuziehen.
Räumliche Drehspiegelung
Nach der oben beschriebenen Normalform lässt sich jede Drehspiegelung im Raum durch Wahl einer geeigneten Orthonormalbasis durch eine Matrix

beschreiben, wobei mit
auch alle Sonderfälle erfasst werden. Auch hier ist der Winkel
eindeutig, sofern man die Orientierung des Raumes nicht umkehrt.
Eine doppelte Drehung im vierdimensionalen Raum
Im vierdimensionalen Raum ist eine gleichzeitige Drehung mit zwei unabhängigen Drehwinkeln möglich:

Vertauscht man bei einer zweidimensionalen Drehung  die beiden Basisvektoren, so erhält man die Drehung
die beiden Basisvektoren, so erhält man die Drehung  .
Das ist nicht verwunderlich, hat man doch gleichzeitig die Orientierung
der Ebene verändert. Vertauscht man nun im vorliegenden Beispiel gleichzeitig
den ersten mit dem zweiten wie auch den dritten mit dem vierten Basisvektor, so
bleibt die Orientierung erhalten, aber aus
.
Das ist nicht verwunderlich, hat man doch gleichzeitig die Orientierung
der Ebene verändert. Vertauscht man nun im vorliegenden Beispiel gleichzeitig
den ersten mit dem zweiten wie auch den dritten mit dem vierten Basisvektor, so
bleibt die Orientierung erhalten, aber aus  wird
wird  .
.
Die Orthogonale Gruppe als Lie-Gruppe
Ausgehend vom linearen Raum  aller Matrizen gelangt man zur Untermannigfaltigkeit
durch die Forderung, dass die Matrix
orthogonal ist, d.h.
aller Matrizen gelangt man zur Untermannigfaltigkeit
durch die Forderung, dass die Matrix
orthogonal ist, d.h.  gilt. Da orthogonale Matrizen insbesondere invertierbar sind, ist
eine Untergruppe der allgemeinen
linearen Gruppe
gilt. Da orthogonale Matrizen insbesondere invertierbar sind, ist
eine Untergruppe der allgemeinen
linearen Gruppe  .
.
Topologische Eigenschaften
Wie die allgemeine lineare Gruppe besteht auch die orthogonale Gruppe aus
zwei Zusammenhangskomponenten: Matrizen mit positiver bzw. negativer
Determinante im Fall der reellen  ;
und die Menge der orthogonalen Matrizen mit Determinante
im Falle der .
Serge Lang[4]
gibt einen eleganten Beweis für den Wegzusammenhang der
:
Man verbinde die Einheitsmatrix
;
und die Menge der orthogonalen Matrizen mit Determinante
im Falle der .
Serge Lang[4]
gibt einen eleganten Beweis für den Wegzusammenhang der
:
Man verbinde die Einheitsmatrix  mit einer gegebenen Drehung
durch einen Weg innerhalb der .
Wendet man auf jeden Punkt dieses Weges nun das
Gram-Schmidtsche
Orthogonalisierungsverfahren an, so erhält man einen Weg, der ganz in der
verläuft. Da die Multiplikation mit der Diagonalmatrix
mit einer gegebenen Drehung
durch einen Weg innerhalb der .
Wendet man auf jeden Punkt dieses Weges nun das
Gram-Schmidtsche
Orthogonalisierungsverfahren an, so erhält man einen Weg, der ganz in der
verläuft. Da die Multiplikation mit der Diagonalmatrix  einen Diffeomorphismus
von
mit seinem Komplement
in der
liefert, ist auch Letzteres zusammenhängend.
einen Diffeomorphismus
von
mit seinem Komplement
in der
liefert, ist auch Letzteres zusammenhängend.
Weiterhin sind
wie
natürlich kompakt.
Es handelt sich um eine abgeschlossene Teilmenge der Einheitskugel bezüglich
der Spektralnorm im
.
Operation der SO(n) auf der Einheitssphäre
Die
operiert
in natürlicher Weise auf dem .
Da orthogonale Abbildungen längentreu sind, sind die Bahnen dieser Operation
genau die Sphären um den Ursprung. Die Operation schränkt also zu einer
transitiven Operation auf der Einheitssphäre
 ein. Die zugehörige Isotropiegruppe
des kanonischen Einheitsvektors
ein. Die zugehörige Isotropiegruppe
des kanonischen Einheitsvektors  der Standardbasis des
besteht genau aus der
der Standardbasis des
besteht genau aus der  ,
aufgefasst als Untergruppe der
mit einer
an der Matrix-Position
,
aufgefasst als Untergruppe der
mit einer
an der Matrix-Position  .
Man erhält somit die kurze
exakte Sequenz
.
Man erhält somit die kurze
exakte Sequenz

beziehungsweise das Hauptfaserbündel (vgl. auch Faserbündel)
 .
.
Hieraus lässt sich induktiv
folgern, dass die Fundamentalgruppe
der
für  zu
zu  isomorph ist.[5]
Sie ist damit ähnlich „verdreht“ wie das Möbiusband.
Die Fundamentalgruppe der Kreisgruppe
isomorph ist.[5]
Sie ist damit ähnlich „verdreht“ wie das Möbiusband.
Die Fundamentalgruppe der Kreisgruppe
 ist
ist  (vgl. auch Windungszahl),
da die
topologisch dem Einheitskreis
(vgl. auch Windungszahl),
da die
topologisch dem Einheitskreis  entspricht.
entspricht.
Die Lie-Algebra zur O(n) und SO(n)
Die Lie-Algebra  besteht genau aus den schiefsymmetrischen Matrizen, die Lie-Algebra
besteht genau aus den schiefsymmetrischen Matrizen, die Lie-Algebra  ,
also der Tangentialraum
der
im Punkt der Einheitsmatrix
,
also der Tangentialraum
der
im Punkt der Einheitsmatrix
 ,
besteht genau aus den schiefsymmetrischen
Matrizen[6],
die zugleich spurlos
sind, was im Reellen bereits durch die Schiefsymmetrie impliziert ist. Daher
sind beide Lie-Algebren gleich
,
besteht genau aus den schiefsymmetrischen
Matrizen[6],
die zugleich spurlos
sind, was im Reellen bereits durch die Schiefsymmetrie impliziert ist. Daher
sind beide Lie-Algebren gleich
 .
.
Ist also  schiefsymmetrisch, so liefert die Exponentialabbildung
für Matrizen die zugehörige Einparametergruppe
schiefsymmetrisch, so liefert die Exponentialabbildung
für Matrizen die zugehörige Einparametergruppe

In allgemeinen Lie-Gruppen ist die Exponentialabbildung nur lokal surjektiv,
von einer Umgebung der Null auf eine Umgebung der Eins; die Exponentialabbildung
von
nach
dagegen ist tatsächlich (global) surjektiv.
Offensichtlich ist eine schiefsymmetrische Matrix durch die  Einträge oberhalb der Hauptdiagonale
eindeutig bestimmt. Damit ist die Dimension der
ebenfalls geklärt.
Einträge oberhalb der Hauptdiagonale
eindeutig bestimmt. Damit ist die Dimension der
ebenfalls geklärt.
Im Fall  haben die Matrizen der zugehörigen Lie-Algebren die einfache Form
haben die Matrizen der zugehörigen Lie-Algebren die einfache Form

wobei  die zweite Pauli-Matrix
ist.
die zweite Pauli-Matrix
ist.
Im Fall  ist die zugehörige Lie-Algebra
ist die zugehörige Lie-Algebra  isomorph zum
isomorph zum  mit dem Kreuzprodukt
als Lie-Klammer. Zum Nachweis
muss man lediglich den Kommutator
zweier generischer,
also mit je drei freien Variablen gebildeter, schiefsymmetrischer Matrizen
berechnen und das Ergebnis mit der Formel für das Kreuzprodukt vergleichen.
mit dem Kreuzprodukt
als Lie-Klammer. Zum Nachweis
muss man lediglich den Kommutator
zweier generischer,
also mit je drei freien Variablen gebildeter, schiefsymmetrischer Matrizen
berechnen und das Ergebnis mit der Formel für das Kreuzprodukt vergleichen.
Dreidimensionale Drehungen
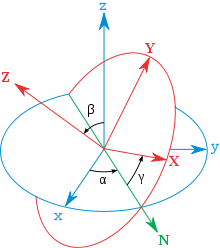
 und
und  :
Das blaue Dreibein soll in das rote überführt werden. Überführt man die rote wie
die blaue x-Achse durch Drehungen um die jeweilige z-Achse auf die grüne
„Knotenlinie“, so fehlt nur noch eine Drehung um die grüne
Achse.
:
Das blaue Dreibein soll in das rote überführt werden. Überführt man die rote wie
die blaue x-Achse durch Drehungen um die jeweilige z-Achse auf die grüne
„Knotenlinie“, so fehlt nur noch eine Drehung um die grüne
Achse.Beschreibung durch Achse und Winkel
Eine Drehung im dreidimensionalen Raum lässt sich durch die Angabe einer
Drehachse, also eines Vektors  der Länge Eins auf der Einheitssphäre,
und eines Drehwinkels
der Länge Eins auf der Einheitssphäre,
und eines Drehwinkels ![\varphi \in [0;2\pi ]](/svg/a62797db00505afa797ab7a8b7e0649fbdf40f65.svg) beschreiben. Im Sonderfall
beschreiben. Im Sonderfall  erhält man die identische Abbildung; für andere Winkel, auch im Fall einer
Geradenspiegelung mit
erhält man die identische Abbildung; für andere Winkel, auch im Fall einer
Geradenspiegelung mit  ,
ist die Achse eindeutig festgelegt. Durch Wechsel der Orientierung der Drehachse
lässt sich eine Drehung um
auch als eine Drehung mit Winkel
,
ist die Achse eindeutig festgelegt. Durch Wechsel der Orientierung der Drehachse
lässt sich eine Drehung um
auch als eine Drehung mit Winkel  auffassen.
auffassen.
Die zugehörige Drehung  lässt sich durch eine zugehörige Drehmatrix
explizit angegeben (siehe dort).
lässt sich durch eine zugehörige Drehmatrix
explizit angegeben (siehe dort).
Beschreibung durch Eulersche Winkel
Auf Leonhard
Euler geht eine andere Beschreibung von Drehungen über drei Winkel, die
sogenannten Eulerschen
Winkel, zurück. Ausgehend von der Standardbasis  zeigt Euler, dass sich jede Drehung
zeigt Euler, dass sich jede Drehung  als
als

schreiben lässt.[8]
Dabei sind die drei Winkel mit der Einschränkung  bis auf singuläre Bereiche eindeutig bestimmt: etwa für
bis auf singuläre Bereiche eindeutig bestimmt: etwa für  reicht natürlich einer der beiden anderen Winkel völlig aus.
reicht natürlich einer der beiden anderen Winkel völlig aus.
Eulerwinkel werden in der Physik gerne verwendet; auch die Beschreibung der Bahnen von Planeten oder Asteroiden durch die sogenannten Bahnelemente beruht hierauf.
Beschreibung mittels Quaternionen






Die Hamiltonschen Quaternionen
 gestatten eine sehr elegante Beschreibung räumlicher Drehungen. Die Quaternionen
bilden eine vierdimensionale Algebra
über den reellen Zahlen. Als Basis verwendet man vier besondere Quaternionen,
nämlich
gestatten eine sehr elegante Beschreibung räumlicher Drehungen. Die Quaternionen
bilden eine vierdimensionale Algebra
über den reellen Zahlen. Als Basis verwendet man vier besondere Quaternionen,
nämlich  und
und  .
Hierbei ist
.
Hierbei ist  (die Multiplikation ist also nicht kommutativ) und es gelten die folgenden von
William Rowan Hamilton angegebenen Rechenregeln:
(die Multiplikation ist also nicht kommutativ) und es gelten die folgenden von
William Rowan Hamilton angegebenen Rechenregeln:  .
Mit dieser Multiplikationsvorschrift – verschiedene, mathematisch exakte
Konstruktionen der Quaternionenalgebra finden sich hier
– wird
sogar zu einem Schiefkörper:
Zu jeder von null verschiedenen Quaternion
.
Mit dieser Multiplikationsvorschrift – verschiedene, mathematisch exakte
Konstruktionen der Quaternionenalgebra finden sich hier
– wird
sogar zu einem Schiefkörper:
Zu jeder von null verschiedenen Quaternion  lässt sich eine inverse Quaternion
lässt sich eine inverse Quaternion  berechnen, für die
berechnen, für die  gilt.[9]
gilt.[9]
Eine Quaternion heißt rein, wenn sie sich als Linearkombination der
drei Basisvektoren  und
schreiben lässt. Vermöge der linearen Einbettung
und
schreiben lässt. Vermöge der linearen Einbettung

mit  ,
,
 und
und  identifizieren wir den
mit den reinen Quaternionen. Nun lässt sich die Multiplikationsregel für
Quaternionen geometrisch deuten: Das Produkt zweier reiner Quaternionen
identifizieren wir den
mit den reinen Quaternionen. Nun lässt sich die Multiplikationsregel für
Quaternionen geometrisch deuten: Das Produkt zweier reiner Quaternionen
 und
und  ist zwar nicht wieder rein, aber es gilt
ist zwar nicht wieder rein, aber es gilt

Der reine Anteil des Produktes zweier reiner Quaternionen entspricht also
ihrem Vektorprodukt,
während der skalare Anteil (der Koeffizient vor dem Basisvektor )
ihr Skalarprodukt
darstellt.
Um nun die Drehung
durch eine Quaternion zu beschreiben, benötigen wir zunächst einen Winkel
 ,
dessen Doppeltes,
,
dessen Doppeltes,  dem gegebenen
entspricht. Neben
dem gegebenen
entspricht. Neben  leistet dies auch
leistet dies auch  .
Wir betrachten nun die Quaternion
.
Wir betrachten nun die Quaternion

Diese Quaternion hat Länge Eins (bezüglich des Standardskalarprodukts in
 )
und ihr Inverses lautet
)
und ihr Inverses lautet

Nimmt man nun eine beliebige reine Quaternion  ,
so lässt sich leicht nachweisen, dass die mit
konjugierte
Quaternion
,
so lässt sich leicht nachweisen, dass die mit
konjugierte
Quaternion

wieder eine reine Quaternion ist (wodurch sie sich erst als  für genau ein
für genau ein  darstellen lässt). Dabei gilt nun
darstellen lässt). Dabei gilt nun

Mit anderen Worten: die Konjugation mit
wirkt auf den reinen Quaternionen wie die Drehung .
Universelle Überlagerung der SO(3)
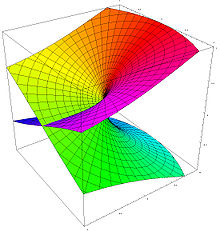
 lassen sich genau zwei Zahlen
lassen sich genau zwei Zahlen  mit
mit  finden. Bei der zeichnerischen Darstellung im dreidimensionalen Raum ist eine
Selbstdurchdringung der Fläche leider unvermeidbar.
finden. Bei der zeichnerischen Darstellung im dreidimensionalen Raum ist eine
Selbstdurchdringung der Fläche leider unvermeidbar.Die oben beobachtete Zweideutigkeit bei der Wahl von
geht einher mit den beiden möglichen Vektoren zur Beschreibung der Achse: Eine
bestimmte Drehung lässt sich genau durch zwei zueinander inverse
Einheitsquaternionen beschreiben. Rein topologisch handelt es sich bei der Menge
der Einheitsquaternionen  offenbar um die dreidimensionale Einheitssphäre
offenbar um die dreidimensionale Einheitssphäre  im vierdimensionalen Raum. Die Quaternionenmultiplikation verleiht ihr eine
Lie-Gruppenstruktur. Als solche ist sie isomorph zur speziellen
unitären Gruppe
im vierdimensionalen Raum. Die Quaternionenmultiplikation verleiht ihr eine
Lie-Gruppenstruktur. Als solche ist sie isomorph zur speziellen
unitären Gruppe  .
Wie im vorangegangenen Abschnitt diskutiert, liefert die Konjugation mit einer
Einheitsquaternion
.
Wie im vorangegangenen Abschnitt diskutiert, liefert die Konjugation mit einer
Einheitsquaternion  eine Drehung. Offenbar handelt es sich hierbei um einen surjektiven
Gruppenhomomorphismus, der in einer genügend kleinen Umgebung von
einen Diffeomorphismus auf sein Bild in
darstellt. Mit anderen Worten, die Abbildung
eine Drehung. Offenbar handelt es sich hierbei um einen surjektiven
Gruppenhomomorphismus, der in einer genügend kleinen Umgebung von
einen Diffeomorphismus auf sein Bild in
darstellt. Mit anderen Worten, die Abbildung

ist eine zweiblättrige Überlagerung.
Da  einfach
zusammenhängend ist, handelt es sich um die universelle Überlagerung der
.
einfach
zusammenhängend ist, handelt es sich um die universelle Überlagerung der
.
Um die anschauliche Bedeutung dieser universellen Überlagerung zu verstehen,
kehren wir zu dem bereits oben betrachteten Fußball zurück. Durch geeignete
Markierungen auf dem Ball lässt sich prinzipiell zu jedem Zeitpunkt die Drehung
bestimmen, die der Ball seit dem Anstoß vollzogen hat. Dies ergibt einen
stetigen Weg durch die ,
der bei der Einheitsmatrix beginnt. Beschreibt man die Einheitsmatrix etwa durch
das Einselement von  (alternativ könnte man das antipodal
gegenüberliegende Element in
(alternativ könnte man das antipodal
gegenüberliegende Element in  also
also  verwenden), so lässt sich nun der gesamte Weg in stetiger Weise zu einem Weg
durch die
liften. Selbst wenn man den Ball zu Beginn der zweiten Halbzeit den Markierungen
entsprechend exakt gleich orientiert wieder auf dem Anstoßpunkt positioniert
(damit endet der Weg durch die
wieder im Punkt der Einheitsmatrix), so ist nicht garantiert, dass auch der
geliftete Weg wieder bei der Eins-Quaternion
verwenden), so lässt sich nun der gesamte Weg in stetiger Weise zu einem Weg
durch die
liften. Selbst wenn man den Ball zu Beginn der zweiten Halbzeit den Markierungen
entsprechend exakt gleich orientiert wieder auf dem Anstoßpunkt positioniert
(damit endet der Weg durch die
wieder im Punkt der Einheitsmatrix), so ist nicht garantiert, dass auch der
geliftete Weg wieder bei der Eins-Quaternion  angelangt ist. Mit einer Wahrscheinlichkeit von
angelangt ist. Mit einer Wahrscheinlichkeit von  endet Letzterer vielmehr in der ;
dann müsste man den Ball noch einmal um 360° bezüglich einer beliebig gewählten
Achse drehen, um auch den gelifteten Weg in seinem Ausgangspunkt enden zu
lassen. Da es keine höherblättrige Überlagerung der
gibt, ist es nicht möglich, die allgemeine Drehungen im Raum in konsistenter
Weise noch feinstufiger zu erfassen.
endet Letzterer vielmehr in der ;
dann müsste man den Ball noch einmal um 360° bezüglich einer beliebig gewählten
Achse drehen, um auch den gelifteten Weg in seinem Ausgangspunkt enden zu
lassen. Da es keine höherblättrige Überlagerung der
gibt, ist es nicht möglich, die allgemeine Drehungen im Raum in konsistenter
Weise noch feinstufiger zu erfassen.
Bemerkenswerterweise verwendet man in der Quantenmechanik
die
und nicht die
als Zustandsraum zur Beschreibung des Spins
eines Teilchens.
Topologie der SO(3)
Jede Faser der soeben beschrieben Überlagerung

besteht aus zwei Antipodenpunkten (entsprechend den beiden Möglichkeiten für
die Wahl von
mit  )
der
)
der  .
Folglich ist die
homöomorph
zum Quotienten von
bei Identifizierung
gegenüberliegender Punkte. Dies ergibt aber genau den dreidimensionalen
reell-projektiven Raum
.
Folglich ist die
homöomorph
zum Quotienten von
bei Identifizierung
gegenüberliegender Punkte. Dies ergibt aber genau den dreidimensionalen
reell-projektiven Raum  .
.
Endliche Untergruppen der SO(3)
Die endlichen Untergruppen der
stehen in einem engen Zusammenhang mit Raumkörpern, die eine endliche Zahl von
Symmetrien aufweisen. Da bei einer beliebigen Drehung etwa eines Würfels im Raum
die zugehörige Untergruppe mit ebendieser Drehung konjugiert wird, interessiert
man sich nur für die Konjugationsklassen der endlichen Untergruppen der
.
Diese sind:
- Die zyklische
Gruppen
 für
für  ,
erzeugt von einer Drehung um den -ten
Teil eines Vollwinkels
,
erzeugt von einer Drehung um den -ten
Teil eines Vollwinkels  ;
für
sind sie Teil der vollen Drehgruppe eines geraden Prismas über einem
regulären -Eck.
;
für
sind sie Teil der vollen Drehgruppe eines geraden Prismas über einem
regulären -Eck. - Die volle Drehgruppe eines solchen Prismas. Sie enthält neben der bereits
beschriebenen
auch diejenigen Drehungen, die auf dem regelmäßigen -Eck
wie Achsenspiegelungen wirken, aber durch gleichzeitiges Spiegeln an der
Trägerebene des -Ecks
zu Drehungen des Raums werden. Es handelt sich um die Diedergruppen
 der Ordnung
der Ordnung  (formal für
(formal für  ;
geometrische Deutung für ).
;
geometrische Deutung für ). - Die volle Drehgruppe
 eines regulären Tetraeders.
Sie ist isomorph zur alternierenden
Gruppe
eines regulären Tetraeders.
Sie ist isomorph zur alternierenden
Gruppe  der Ordnung
der Ordnung  .
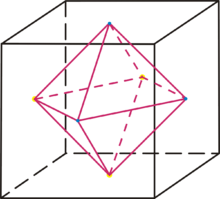
. - Die volle Drehgruppe
 eines regulären Oktaeders,
die sogenannte Oktaedergruppe
der Ordnung
eines regulären Oktaeders,
die sogenannte Oktaedergruppe
der Ordnung  .
Sie ist gleichzeitig für den zum Oktaeder dualen Würfel zuständig. Sie ist
isomorph zur symmetrischen
Gruppe
.
Sie ist gleichzeitig für den zum Oktaeder dualen Würfel zuständig. Sie ist
isomorph zur symmetrischen
Gruppe  .
. - Die volle Drehgruppe
 eines regulären Ikosaeders
(siehe Ikosaedergruppe
der Ordnung
eines regulären Ikosaeders
(siehe Ikosaedergruppe
der Ordnung  .
Sie beschreibt zugleich die Drehungen des Dodekaeders
und ist isomorph zur alternierenden Gruppe
.
Sie beschreibt zugleich die Drehungen des Dodekaeders
und ist isomorph zur alternierenden Gruppe  .
.
Literatur
- Theodor Bröcker, Tammo tom Dieck: Representations of Compact Lie Groups (= Graduate Text im Mathematics. Bd. 98). Springer, New York NY u. a. 1985, ISBN 3-540-13678-9.
- Gerd Fischer: Lineare Algebra (= Vieweg-Studium. Bd. 17). 5. Auflage. Vieweg, Braunschweig u. a. 1979, ISBN 3-528-17217-7.
- Serge Lang: Linear Algebra. 2nd edition. Addison-Wesley, Reading MA u. a. 1971.
- Hermann Weyl: The classical Groups. Their invariants and representations (= Princeton Mathematical Series. Bd. 1, ISSN 0079-5194). 2. edition, with supplement, reprinted. Princeton University Press u. a., Princeton NJ 1953.
Anmerkungen
- ↑ Das Skalarprodukt eines euklidischen Vektorraums lässt sich sogar aus dem zugehörigen Längenbegriff alleine rekonstruieren. Vgl. Polarisationsformel.
- ↑
Es handelt sich bei
 um eine Spiegelung an der x-Achse gefolgt von einer Drehung um
um eine Spiegelung an der x-Achse gefolgt von einer Drehung um  .
Dabei bleibt ein um
.
Dabei bleibt ein um  zur x-Achse gedrehter Vektor fest.
zur x-Achse gedrehter Vektor fest. - ↑ Vgl. G. Fischer: Lineare Algebra. 5. Auflage. 1979, S. 205.
- ↑ Vgl. S. Lang: Linear Algebra. 2nd edition. 1971, VI, §2. Zitiert nach Bröcker, tom Dieck: Representations of Compact Lie Groups. 1985, S. 5.
- ↑ Vgl. Bröcker, tom Dieck: Representations of Compact Lie Groups. 1985, S. 36 und S. 61.
- ↑
Vgl. Bröcker, tom Dieck: Representations of
Compact Lie Groups. 1985, S. 20. Wenn man beispielsweise die Funktion
 mit der oben definierten zweidimensionalen Drehung
mit der oben definierten zweidimensionalen Drehung  in
in  ableitet, so erhält man die schiefsymmetrische Matrix
ableitet, so erhält man die schiefsymmetrische Matrix  .
. - ↑
Die insgesamt
 Gleichungen, die die Orthogonalität einer Matrix sicherstellen, haben also nur
(bzw. beim zweiten Nachdenken tatsächlich) den Rang
Gleichungen, die die Orthogonalität einer Matrix sicherstellen, haben also nur
(bzw. beim zweiten Nachdenken tatsächlich) den Rang  .
. - ↑ Die Zeichnung stimmt insofern nicht mit der Zerlegung von D überein, als in der Zeichnung das Koordinatensystem gedreht wird, während in der mathematischen Beschreibung das Koordinatensystem raumfest bleibt.
- ↑
Es ist nämlich
 ein reelles Vielfaches der
ein reelles Vielfaches der  .
.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 25.01. 2021