Vektorinvariante
Die Vektorinvariante ist eine vektorielle Eigenschaft, die einem Tensor zweiter Stufe zugeordnet werden kann. Die Komponenten eines Tensors referenzieren auf Dyaden von Vektoren, die sich ihrerseits komponentenweise bezüglich einer Vektorraumbasis darstellen lassen. Bei einem Wechsel der Basis ändern sich die Komponenten der Vektoren in charakteristischer Weise nicht aber die Beträge der Vektoren. Der Betrag eines Vektors ist also invariant gegenüber einem Wechsel der Basis. Ebenso ist die Vektorinvariante eines Tensors invariant gegenüber einem Wechsel der Basis. Weil das Kreuzprodukt in die Definition eingeht, ist die Vektorinvariante nur in drei Dimensionen definiert.
 durch einen Tensor T.
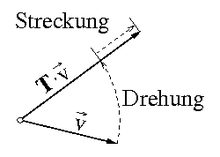
durch einen Tensor T.Tensoren zweiter Stufe werden als lineare Abbildungen von geometrischen Vektoren auf geometrische Vektoren benutzt, die im Allgemeinen dabei gedreht und gestreckt werden, siehe Abbildung rechts. Die Vektorinvariante wird bei der Beschreibung von Drehungen benutzt: Sie ist die Drehachse, um die ein orthogonaler Tensor einen Vektor dreht, und die Winkelgeschwindigkeit ist proportional zur Vektorinvariante des Geschwindigkeitsgradienten.
Definition
Die Vektorinvariante  einer Dyade
einer Dyade  von Vektoren
von Vektoren  aus dem dreidimensionalen euklidischen
Vektorraum
aus dem dreidimensionalen euklidischen
Vektorraum  entsteht, indem das dyadische
Produkt „
entsteht, indem das dyadische
Produkt „ “
durch das Kreuzprodukt
„ד ersetzt wird:
“
durch das Kreuzprodukt
„ד ersetzt wird:

Wenn der Vektor  parallel zum Vektor
parallel zum Vektor  ist, dann ist die Dyade symmetrisch und die Vektorinvariante verschwindet. Die
Ersetzung des dyadischen Produkts durch das Kreuzprodukt in einer Dyade kann mit
dem „Skalarkreuzprodukt“ [1]
mit dem Einheitstensor
1 erreicht werden:
ist, dann ist die Dyade symmetrisch und die Vektorinvariante verschwindet. Die
Ersetzung des dyadischen Produkts durch das Kreuzprodukt in einer Dyade kann mit
dem „Skalarkreuzprodukt“ [1]
mit dem Einheitstensor
1 erreicht werden:

Die Vektoren  stehen hier für eine Orthonormalbasis
und „·“ für das im euklidischen Vektorraum definierte Skalarprodukt. Für einen
Tensor zweiter Stufe T, der immer als Summe von Dyaden darstellbar ist,
bestimmt sich die Vektorinvariante demnach gemäß
stehen hier für eine Orthonormalbasis
und „·“ für das im euklidischen Vektorraum definierte Skalarprodukt. Für einen
Tensor zweiter Stufe T, der immer als Summe von Dyaden darstellbar ist,
bestimmt sich die Vektorinvariante demnach gemäß

Die Schreibweise  ist aus Altenbach (2012). Bezüglich der Orthonormalbasis
schreibt sich speziell:
ist aus Altenbach (2012). Bezüglich der Orthonormalbasis
schreibt sich speziell:

Invarianz
Der Nachweis der Invarianz der Vektorinvariante gelingt mit Transformationen der Form

die Einheitstensoren sind und beim Produkt mit einem Tensor den Tensor nicht
verändern. Die Vektoren  müssen hier eine Vektorraumbasis
bilden und
müssen hier eine Vektorraumbasis
bilden und  sind die dazu duale
Basis. Gegeben sei nun ein Tensor zweiter Stufe mit Komponenten
sind die dazu duale
Basis. Gegeben sei nun ein Tensor zweiter Stufe mit Komponenten  bezüglich zweier beliebiger Basissysteme
bezüglich zweier beliebiger Basissysteme  und
und 

Mit Transformationen U und V entsteht der Tensor mit
Komponenten bezüglich der Basen
bzw. 
![{\displaystyle {\begin{aligned}\mathbf {T} =&\mathbf {U\cdot T\cdot V} ^{\top }\\=&\sum _{i,j,k,l=1}^{3}({\vec {u}}_{k}\otimes {\vec {u}}^{k})\cdot (T_{ij}{\vec {a}}_{i}\otimes {\vec {b}}_{j})\cdot ({\vec {v}}^{l}\otimes {\vec {v}}_{l})\\=&\sum _{i,j,k,l=1}^{3}\underbrace {[T_{ij}({\vec {u}}^{k}\cdot {\vec {a}}_{i})({\vec {v}}^{l}\cdot {\vec {b}}_{j})]} _{:=T_{kl}^{*}}{\vec {u}}_{k}\otimes {\vec {v}}_{l}\\=&\sum _{k,l=1}^{3}T_{kl}^{*}{\vec {u}}_{k}\otimes {\vec {v}}_{l}\end{aligned}}}](/svg/38610512ca2e1b6a23d644f5dcdcfff0d29d98a0.svg)
Das hochgestellte „T“ steht für die Transposition. Damit berechnet sich
![{\displaystyle {\begin{aligned}{\vec {i}}(\mathbf {U\cdot T\cdot V} ^{\top })=&\sum _{k,l=1}^{3}T_{kl}^{*}{\vec {u}}_{k}\times {\vec {v}}_{l}\\=&\sum _{i,j,k,l=1}^{3}[T_{ij}({\vec {u}}^{k}\cdot {\vec {a}}_{i})({\vec {v}}^{l}\cdot {\vec {b}}_{j})]{\vec {u}}_{k}\times {\vec {v}}_{l}\\=&\sum _{i,j=1}^{3}T_{ij}{\vec {a}}_{i}\times {\vec {b}}_{j}\\=&{\vec {i}}(\mathbf {T} )\,.\end{aligned}}}](/svg/866c18619e99d8ba2feba6dcec20665ee60e11a2.svg)
Die Vektorinvariante verdient ihren Namen also.
Axialität und Objektivität
Wenn die obigen Transformationen identisch und orthogonal sind, also die
Eigenschaft  besitzen, dann ergibt sich für einen wie oben vorgegebenen Tensor T:
besitzen, dann ergibt sich für einen wie oben vorgegebenen Tensor T:

Wenn Q eigentlich orthogonal ist, dann ist seine Determinante det gleich eins und die Vektorinvariante objektiv, denn sie transformiert sich bei einer euklidischen Transformation wie ein objektiver Vektor.
Bei einer Drehspiegelung
um
gilt  und daher
und daher

Vektoren mit dieser Eigenschaft bei einer Drehspiegelung sind axiale Vektoren.
Dualer Vektor und Kreuzproduktmatrix
Jedem schiefsymmetrischen Tensor T kann über

ein dualer Vektor  zugeordnet werden. Der duale Vektor ist proportional zur Vektorinvariante:
zugeordnet werden. Der duale Vektor ist proportional zur Vektorinvariante:

Bezüglich der Orthonormalbasis
schreibt sich speziell:

Der Tensor T kann mittels  aus seinem dualen Vektor rekonstruiert werden. In der linearen Algebra heißt
die dem Vektor
analog zugeordnete Matrix Kreuzproduktmatrix.
aus seinem dualen Vektor rekonstruiert werden. In der linearen Algebra heißt
die dem Vektor
analog zugeordnete Matrix Kreuzproduktmatrix.
Eigenschaften
Mit elementarer Tensoralgebra können die folgenden Eigenschaften der
Vektorinvariante nachgewiesen werden. Seien x eine beliebige Zahl,
ein beliebiger Vektor und  beliebige Tensoren zweiter Stufe. Dann gilt:
beliebige Tensoren zweiter Stufe. Dann gilt:

Darin sind „#“ das äußere Tensorprodukt,

der Kofaktor und I1,2 Hauptinvarianten des Tensors T.
Aus den ersten beiden Eigenschaften folgt, dass nur der schiefsymmetrische Anteil eines Tensors zur Vektorinvariante etwas beiträgt und symmetrische Tensoren den Nullvektor als Vektorinvariante besitzen.
Anmerkung
- ↑
Das Skalarkreuzprodukt ist mit Vektoren
 definiert über
definiert über 


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 25.08. 2019