Isotrope Funktion
 durch einen Tensor
durch einen Tensor  .
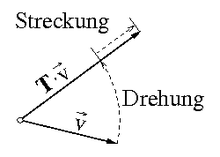
.Eine isotrope Funktion ist in der Kontinuumsmechanik eine von einem oder mehreren Skalaren, geometrischen Vektoren oder Tensoren abhängige Funktion, deren Wert bei einer Drehung ihrer Argumente genauso transformiert wird, wie ihre Argumente. Tensoren zweiter Stufe werden hier als lineare Abbildungen von geometrischen Vektoren auf geometrische Vektoren benutzt, die im Allgemeinen dabei gedreht und gestreckt werden, siehe die Abbildung rechts. Die Tensoren bestehen aus Dyaden von zwei geometrischen Vektoren und werden gedreht indem beide Vektoren in der Dyade in gleicher Weise gedreht werden. Eine isotrope Funktion folgt dieser Drehung ihrer Argumente.
Isotrope Funktionen spielen eine wichtige Rolle in der Definition von Eigenschaften isotroper Materialien, z.B. in der Hyperelastizität.
Definition
Gegeben sei der dreidimensionale euklidische
Vektorraum  ,
der Vektorraum
,
der Vektorraum  der linearen tensoriellen Abbildungen dieses Raumes auf sich und die Spezielle
orthogonale Gruppe
der linearen tensoriellen Abbildungen dieses Raumes auf sich und die Spezielle
orthogonale Gruppe

der eigentlich orthogonalen Tensoren, die reine Drehungen ohne Spiegelungen verkörpern. Dann gelten bei einer Drehung die Transformationsgleichungen
| Größe | Transformierte Größe |
|---|---|
Skalar  |
 |
Vektor  |
 |
Tensor  |
 |
Skalare Funktion
Eine skalare Funktion reell-, vektor- oder tensorwertiger Argumente ist isotrop, wenn für jeden orthogonalen Tensor aus der speziellen orthogonalen Gruppe gilt:

Tensorwertige Funktion oder Tensorfunktion
Eine Tensorfunktion von Tensoren ist isotrop, wenn für jeden orthogonalen Tensor aus der speziellen orthogonalen Gruppe gilt:

Beispiele
Skalare Funktionen
Alle Hauptinvarianten und anderen Invarianten der Tensoren sind per definitionem isotrope Funktionen ihres Tensors, beispielsweise:
 .
.
Tensorfunktionen
Die Ableitungen[1] der Invarianten nach ihrem Tensor sind isotrope Tensorfunktionen, beispielsweise:

Ein Polynom einer tensorwertigen Variable mit konstanten reellen Koeffizienten

ist eine isotrope Tensorfunktion, denn

Isotrope Tensorfunktionen eines symmetrischen Argumentes
Die Spannungs-, Verzerrungs- und Strecktensoren spielen in der Formulierung von Materialmodellen in der Kontinuumsmechanik eine hervorragende Rolle und sind symmetrisch. Wenn nun die Argumente einer isotropen Tensorfunktion symmetrisch sind, dann hat diese Funktion besondere und wichtige Eigenschaften.
Eigensystem
Die Eigenvektoren einer isotropen Tensorfunktion eines symmetrischen Tensors stimmen mit denen des Tensors überein. Wenn also

gilt, dann ist
 ,
,
d. h. die Eigenvektoren stimmen überein, nicht so aber - im Allgemeinen - die Eigenwerte. Dies ist einer der Ausgangspunkte für den folgenden Darstellungssatz.
Darstellungssatz
Jede isotrope Tensorfunktion eines symmetrischen Argumentes lässt sich in der Form

wiedergeben. Darin sind  skalare Funktionen der Hauptinvarianten
skalare Funktionen der Hauptinvarianten
 des Tensors. Nach dem Satz
von Cayley-Hamilton kann gleichbedeutend
des Tensors. Nach dem Satz
von Cayley-Hamilton kann gleichbedeutend

mit anderen skalaren Funktionen  der Hauptinvarianten geschrieben werden.
der Hauptinvarianten geschrieben werden.
Kommutativitität
Im Tensorprodukt einer isotropen Tensorfunktion eines symmetrischen Tensors mit ihrem Argument kann die Reihenfolge der Faktoren vertauscht werden:
 ,
,
was eine direkte Folge des obigen Darstellungssatzes ist.
Fußnoten
- ↑
Die Fréchet-Ableitung
einer skalaren Funktion
 nach einem Tensor
ist der Tensor
nach einem Tensor
ist der Tensor  für den - sofern er existiert - gilt:
für den - sofern er existiert - gilt:
 und ":" das Frobenius-Skalarprodukt.
Dann wird auch
und ":" das Frobenius-Skalarprodukt.
Dann wird auch




© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.05. 2025