Ellipsoid
 ),
), ),
), )
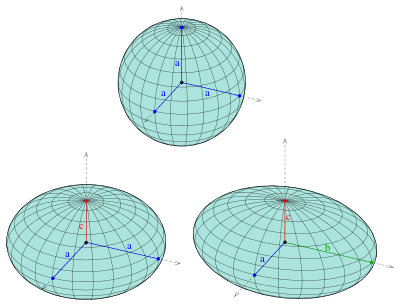
)Ein Ellipsoid ist die 3-dimensionale Entsprechung einer Ellipse. So wie sich eine Ellipse als affines Bild des Einheitskreises auffassen lässt, gilt:
- Ein Ellipsoid (als Fläche)
ist ein affines Bild der Einheitskugel

Die einfachsten affinen Abbildungen sind die Skalierungen der kartesischen Koordinaten. Sie liefern Ellipsoide mit Gleichungen

Solch ein Ellipsoid ist punktsymmetrisch
zum Punkt  ,
dem Mittelpunkt des Ellipsoids. Die Zahlen
,
dem Mittelpunkt des Ellipsoids. Die Zahlen  sind analog zu einer Ellipse die Halbachsen des Ellipsoids und die Punkte
sind analog zu einer Ellipse die Halbachsen des Ellipsoids und die Punkte  seine 6 Scheitelpunkte.
seine 6 Scheitelpunkte.
- Falls
 ist, ist das Ellipsoid eine Kugel.
ist, ist das Ellipsoid eine Kugel. - Falls genau zwei Halbachsen übereinstimmen, ist das Ellipsoid ein Rotationsellipsoid.
- Falls die 3 Halbachsen alle verschieden sind, heißt das Ellipsoid triaxial oder dreiachsig.
Alle Ellipsoide  sind symmetrisch
zu jeder der drei Koordinatenebenen. Beim Rotationsellipsoid
kommt noch die Rotationssymmetrie
bezüglich der Rotationsachse
hinzu. Eine Kugel ist zu jeder Ebene
durch den Mittelpunkt symmetrisch.
sind symmetrisch
zu jeder der drei Koordinatenebenen. Beim Rotationsellipsoid
kommt noch die Rotationssymmetrie
bezüglich der Rotationsachse
hinzu. Eine Kugel ist zu jeder Ebene
durch den Mittelpunkt symmetrisch.
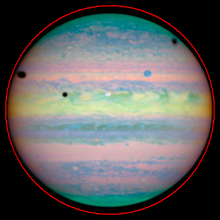
Angenäherte Beispiele für Rotationsellipsoide sind der Rugbyball und abgeplattete rotierende Himmelskörper, etwa die Erde oder andere Planeten (Jupiter), Sonnen oder Galaxien. Elliptische Galaxien und Zwergplaneten (z.B. (136108) Haumea) können auch triaxial sein.
In der Linearen Optimierung werden Ellipsoide in der Ellipsoid-Methode verwendet.
Parameterdarstellung
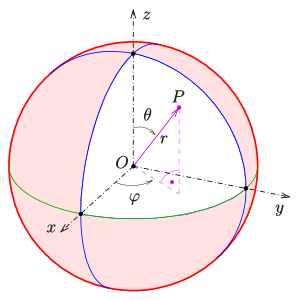
 eines Punktes und kartesisches
eines Punktes und kartesisches Die Punkte auf der Einheitskugel können wie folgt parametrisiert werden (siehe Kugelkoordinaten):

Für den Winkel  (von der z-Achse aus gemessen) gilt
(von der z-Achse aus gemessen) gilt  .
Für den Winkel
.
Für den Winkel  (von der x-Achse aus gemessen) gilt
(von der x-Achse aus gemessen) gilt  .
.
Skaliert man die einzelnen Koordinaten
mit den Faktoren
,
so ergibt sich eine Parameterdarstellung
des Ellipsoids :

mit
und 
Volumen
Das Volumen des Ellipsoids
ist

Eine Kugel
mit Radius
 hat das Volumen
hat das Volumen 
- Herleitung
Der Schnitt des Ellipsoids
mit einer Ebene
in der Höhe
 ist die Ellipse
ist die Ellipse  mit den Halbachsen
mit den Halbachsen
 .
.
Der Flächeninhalt
dieser Ellipse ist  .
Das Volumen
ergibt sich dann aus
.
Das Volumen
ergibt sich dann aus

Oberfläche
Oberfläche eines Rotationsellipsoids
Die Oberfläche
eines abgeplatteten
Rotationsellipsoids  mit
mit  ist
ist

die des verlängerten
Ellipsoids ( )
)

Eine Kugel
mit Radius
hat die Oberfläche  .
.
Oberfläche des triaxialen Ellipsoids
Die Oberfläche
eines triaxialen Ellipsoids lässt sich nicht mit Hilfe von Funktionen
ausdrücken, die man als elementar
ansieht, wie z.B.  oder
oder  oben beim Rotationsellipsoid.
Die Flächenberechnung gelang Adrien-Marie
Legendre mit Hilfe der elliptischen
Integrale. Sei
oben beim Rotationsellipsoid.
Die Flächenberechnung gelang Adrien-Marie
Legendre mit Hilfe der elliptischen
Integrale. Sei  .
Schreibt man
.
Schreibt man
 und
und 
so lauten die Integrale
 und
und 
Die Oberfläche hat mit  und
und  nach Legendre
den Wert
nach Legendre
den Wert

Werden die Ausdrücke
für  und
sowie die Substitutionen
und
sowie die Substitutionen
 und
und 
in die Gleichung für  eingesetzt, so ergibt sich die Schreibweise
eingesetzt, so ergibt sich die Schreibweise

Von Knud Thomsen stammt die integralfreie Näherungsformel

Die maximale Abweichung vom exakten Resultat beträgt weniger als 1,2 %.
Im Grenzfall eines vollständig plattgedrückten Ellipsoids  streben alle drei angegebenen Formeln
für
gegen
streben alle drei angegebenen Formeln
für
gegen  den doppelten Wert des Flächeninhalts
einer Ellipse mit den Halbachsen
den doppelten Wert des Flächeninhalts
einer Ellipse mit den Halbachsen
 und
und  .
.
Anwendungsbeispiel zu den Formeln
Der Planet Jupiter ist wegen den durch die schnelle Rotation wirkenden Zentrifugalkräfte an den Polen deutlich flacher als am Äquator und haben annähernd die Form eines Rotationsellipsoids.
Der Jupiter hat den Äquatordurchmesser 142984 km und den Poldurchmesser
133708 km. Also gilt für die Halbachsen  und
und  .
Die Masse
des Jupiter beträgt etwa 1,899 · 1027 kg. Daraus ergibt sich mithilfe
der oben genannten Formeln
für das Volumen, die mittlere Dichte und die Oberfläche:
.
Die Masse
des Jupiter beträgt etwa 1,899 · 1027 kg. Daraus ergibt sich mithilfe
der oben genannten Formeln
für das Volumen, die mittlere Dichte und die Oberfläche:
- Volumen:

- Das ist etwa 1321-mal so viel wie das Volumen der Erde.
- Mittlere Dichte:

- Der Jupiter hat also insgesamt eine etwas höhere Dichte als Wasser unter Standardbedingungen.
- Oberfläche:

- Das ist etwa 121-mal so viel wie die Oberfläche der Erde.
Ebene Schnitte
Eigenschaften
Der Schnitt eines Ellipsoids mit einer Ebene ist
- eine Ellipse, falls er wenigstens zwei Punkte enthält,
- ein Punkt, falls die Ebene eine Tangentialebene ist,
- andernfalls leer.
Der erste Fall folgt aus der Tatsache, dass eine Ebene eine Kugel in einem Kreis schneidet und ein Kreis bei einer affinen Abbildung in eine Ellipse übergeht. Dass einige der Schnittellipsen Kreise sind, ist bei einem Rotationsellipsoid offensichtlich: Alle ebenen Schnitte, die wenigstens 2 Punkte enthalten und deren Ebenen senkrecht zur Rotationsachse sind, sind Kreise. Dass aber auch jedes 3-achsige Ellipsoid viele Kreise enthält, ist nicht offensichtlich und wird in Kreisschnittebene erklärt.
Der wahre Umriss eines beliebigen Ellipsoids ist sowohl bei Parallelprojektion als auch bei Zentralprojektion ein ebener Schnitt, also eine Ellipse (siehe Bilder).
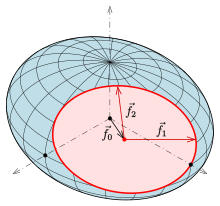
Bestimmung einer Schnittellipse
Gegeben: Ellipsoid  und eine Ebene mit der Gleichung
und eine Ebene mit der Gleichung
 die das Ellipsoid in einer Ellipse schneidet.
die das Ellipsoid in einer Ellipse schneidet.
Gesucht: Drei Vektoren  (Mittelpunkt) und
(Mittelpunkt) und  (konjugierte Vektoren) so, dass die Schnittellipse durch die Parameterdarstellung
(konjugierte Vektoren) so, dass die Schnittellipse durch die Parameterdarstellung

beschrieben werden kann (siehe Ellipse).
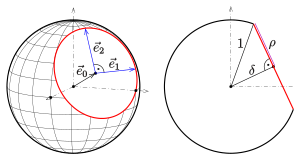
Lösung: Die Skalierung  führt das Ellipsoid in die Einheitskugel
führt das Ellipsoid in die Einheitskugel
 und die gegebene Ebene
in die Ebene mit der Gleichung
und die gegebene Ebene
in die Ebene mit der Gleichung
 über. Die Hesse-Normalform
der neuen Ebene sei
über. Die Hesse-Normalform
der neuen Ebene sei  mit dem Normaleneinheitsvektor
mit dem Normaleneinheitsvektor
 Dann ist
Dann ist
der Mittelpunkt
des Schnittkreises  und dessen Radius
und dessen Radius 
Falls
 ist, sei
ist, sei  (Die Ebene ist horizontal!)
(Die Ebene ist horizontal!)
Falls  ist, sei
ist, sei 
Die
Vektoren  sind in jedem Fall zwei in der Schnittebene liegende orthogonale Vektoren der
Länge
sind in jedem Fall zwei in der Schnittebene liegende orthogonale Vektoren der
Länge  (Kreisradius), d.h., der Schnittkreis wird durch die Parameterdarstellung
(Kreisradius), d.h., der Schnittkreis wird durch die Parameterdarstellung
 beschrieben.
beschrieben.
Macht man nun die obige Skalierung (affine
Abbildung) rückgängig, so wird die Einheitskugel
wieder zum gegebenen Ellipsoid und man erhält aus den Vektoren  die gesuchten Vektoren
die gesuchten Vektoren  ,
mit denen man die Schnittellipse beschreiben kann. Wie man daraus die Scheitelpunkte der
Ellipse und damit ihre Halbachsen bestimmt, wird unter Ellipse
erklärt.
,
mit denen man die Schnittellipse beschreiben kann. Wie man daraus die Scheitelpunkte der
Ellipse und damit ihre Halbachsen bestimmt, wird unter Ellipse
erklärt.
Beispiel: Die Bilder gehören zu dem Beispiel mit  und der Schnittebene
und der Schnittebene  Das Bild des Ellipsoidschnittes ist eine senkrechte Parallelprojektion
auf eine Ebene
parallel zur Schnittebene, d.h., die Ellipse erscheint bis auf eine
uniforme Skalierung in wahrer Gestalt. Man beachte, dass
hier im Gegensatz zu
Das Bild des Ellipsoidschnittes ist eine senkrechte Parallelprojektion
auf eine Ebene
parallel zur Schnittebene, d.h., die Ellipse erscheint bis auf eine
uniforme Skalierung in wahrer Gestalt. Man beachte, dass
hier im Gegensatz zu  nicht auf der Schnittebene senkrecht steht. Die Vektoren
sind hier im Gegensatz zu
nicht auf der Schnittebene senkrecht steht. Die Vektoren
sind hier im Gegensatz zu  nicht
orthogonal.
nicht
orthogonal.
Fadenkonstruktion
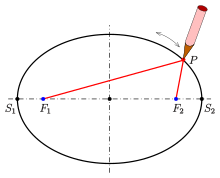
 Länge des Fades (rot)
Länge des Fades (rot)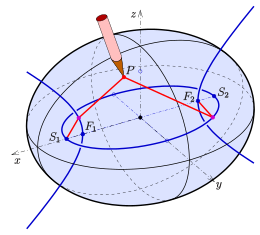
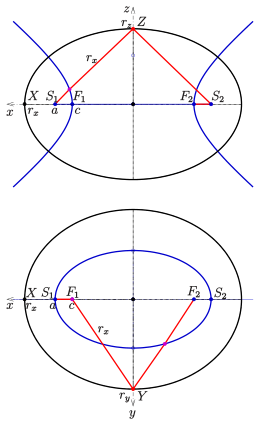
Die Fadenkonstruktion eines Ellipsoids ist eine Übertragung der Idee der Gärtnerkonstruktion einer Ellipse (siehe Abbildung). Eine Fadenkonstruktion eines Rotationsellipsoids ergibt sich durch Konstruktion der Meridian-Ellipsen mit Hilfe eines Fadens.
Punkte eines 3-achsigen Ellipsoids mit Hilfe eines gespannten Fadens zu konstruieren ist etwas komplizierter. Wolfgang Boehm schreibt in dem Artikel Die Fadenkonstruktion der Flächen zweiter Ordnung die Grundidee der Fadenkonstruktion eines Ellipsoids dem schottischen Physiker James Clerk Maxwell (1868) zu. Otto Staude hat in Arbeiten 1882, 1886, 1898 die Fadenkonstruktion dann auf Quadriken verallgemeinert. Die Fadenkonstruktion für Ellipsoide und Hyperboloide wird auch in dem Buch Anschauliche Geometrie von David Hilbert und Stefan Cohn-Vossen beschrieben. Auch Sebastian Finsterwalder beschäftigte sich 1886 mit diesem Thema.
- Konstruktionsschritte
- (1) Man wähle eine Ellipse und eine Hyperbel, die ein Paar von Fokalkegelschnitten bilden:
- Ellipse:
 und
und - Hyperbel:

- mit den Scheitelpunkten und Brennpunkten der Ellipse

- und einen Faden (in der Abbildung Bild rot) der Länge
 .
. - (2) Man befestige das eine Ende des Fadens im Scheitelpunkt
 und das andere Ende im Brennpunkt
und das andere Ende im Brennpunkt
 .
Der Faden wird in einem Punkt
.
Der Faden wird in einem Punkt
 so gespannt gehalten, dass der Faden von hinten auf der Hyperbel und
von vorn auf der Ellipse
gleiten kann (siehe Abbildung). Der Faden geht über denjenigen Hyperbelpunkt,
mit dem die Entfernung von
nach
über einen Hyperbelpunkt minimal wird. Analoges gilt für den Fadenteil von
nach
über einen Ellipsenpunkt.
so gespannt gehalten, dass der Faden von hinten auf der Hyperbel und
von vorn auf der Ellipse
gleiten kann (siehe Abbildung). Der Faden geht über denjenigen Hyperbelpunkt,
mit dem die Entfernung von
nach
über einen Hyperbelpunkt minimal wird. Analoges gilt für den Fadenteil von
nach
über einen Ellipsenpunkt. - (3) Wählt man den Punkt
so, dass er positive y- und z-Koordinaten
hat, so ist
ein Punkt des Ellipsoids mit der Gleichung
 und
und
- (4) die restlichen Punkte des Ellipsoids erhält man durch geeignetes Umspannen des Fadens an den Fokalkegelschnitten.
Die Gleichungen für die
Halbachsen des erzeugten Ellipsoids ergeben sich, wenn man den Punkt
in die beiden Scheitelpunkte
 fallen lässt:
fallen lässt:
Aus der unteren Zeichnung erkennt man, dass  auch die Brennpunkte
der Äquatorellipse sind. D. h.: Die Äquatorellipse ist konfokal zur
gegebenen Fokalellipse. Also ist
auch die Brennpunkte
der Äquatorellipse sind. D. h.: Die Äquatorellipse ist konfokal zur
gegebenen Fokalellipse. Also ist  ,
woraus sich
,
woraus sich  ergibt. Ferner erkennt man, dass
ergibt. Ferner erkennt man, dass  ist.
ist.
Aus der oberen Zeichnung ergibt sich:  sind die Brennpunkte
der Ellipse
in der x-z-Ebene
und es gilt
sind die Brennpunkte
der Ellipse
in der x-z-Ebene
und es gilt  .
.
Umkehrung:
Möchte man ein durch seine Gleichung gegebenes
3-achsiges Ellipsoid  mit den Halbachsen
mit den Halbachsen  konstruieren, so lassen sich aus den Gleichungen im Schritt (3) die für
die Fadenkonstruktion nötigen Parameter
konstruieren, so lassen sich aus den Gleichungen im Schritt (3) die für
die Fadenkonstruktion nötigen Parameter  berechnen. Für die folgenden Überlegungen wichtig sind die Gleichungen
berechnen. Für die folgenden Überlegungen wichtig sind die Gleichungen
- (5)

Konfokale Ellipsoide:
Ist  ein zu
konfokales
Ellipsoid mit den Quadraten der Halbachsen
ein zu
konfokales
Ellipsoid mit den Quadraten der Halbachsen
- (6)

so erkennt man aus den vorigen Gleichungen,
dass die zu
gehörigen Fokalkegelschnitte
für die Fadenerzeugung dieselben Halbachsen
wie die von
besitzen. Deshalb fasst man – analog der Rolle der Brennpunkte bei
der Fadenerzeugung einer Ellipse
– die Fokalkegelschnitte eines 3-achsigen Ellipsoids als deren unendlich viele
Brennpunkte auf und nennt sie Fokalkurven des Ellipsoids.
Auch die Umkehrung ist richtig: Wählt man einen zweiten Faden der Länge  und setzt
und setzt  ,
so gilt
,
so gilt  D. h.: Die beiden Ellipsoide sind konfokal.
D. h.: Die beiden Ellipsoide sind konfokal.
Grenzfall Rotationsellipsoid:
Im Fall  ist
ist  ,
d.h., die Fokalellipse artet in eine Strecke und die Hyperbel in zwei
Strahlen
auf der x-Achse aus. Das Ellipsoid ist dann ein Rotationsellipsoid
mit der x-Achse als Rotationsachse.
Es ist
,
d.h., die Fokalellipse artet in eine Strecke und die Hyperbel in zwei
Strahlen
auf der x-Achse aus. Das Ellipsoid ist dann ein Rotationsellipsoid
mit der x-Achse als Rotationsachse.
Es ist  .
.
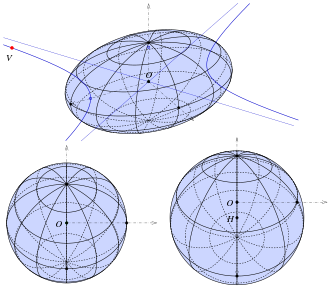
Eigenschaften der Fokalhyperbel:
Betrachtet man ein Ellipsoid von
einem außerhalb gelegenen Punkt
 auf der zugehörigen Fokalhyperbel aus, so erscheint der Umriss des Ellipsoids
als Kreis. Oder,
anders ausgedrückt: Die Tangenten
des Ellipsoids durch
bilden einen senkrechten Kreiskegel,
dessen Rotationsachse
Tangente in
an die Hyperbel
ist.
Lässt man den Augpunkt
ins Unendliche laufen, entsteht die Ansicht einer senkrechten Parallelprojektion
mit einer Asymptote der Fokalhyperbel
als Projektionsrichtung. Die wahre
Umrisskurve auf dem Ellipsoid ist im Allgemeinen kein Kreis.
auf der zugehörigen Fokalhyperbel aus, so erscheint der Umriss des Ellipsoids
als Kreis. Oder,
anders ausgedrückt: Die Tangenten
des Ellipsoids durch
bilden einen senkrechten Kreiskegel,
dessen Rotationsachse
Tangente in
an die Hyperbel
ist.
Lässt man den Augpunkt
ins Unendliche laufen, entsteht die Ansicht einer senkrechten Parallelprojektion
mit einer Asymptote der Fokalhyperbel
als Projektionsrichtung. Die wahre
Umrisskurve auf dem Ellipsoid ist im Allgemeinen kein Kreis.
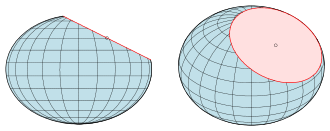
In der
Abbildung ist unten links eine Parallelprojektion eines 3-achsigen Ellipsoids
(Halbachsen: 60,40,30) in Richtung einer Asymptote und unten rechts eine Zentralprojektion mit
Zentrum
auf der Fokalhyperbel und Hauptpunkt  auf der Tangente an die Hyperbel
in
dargestellt. In beiden Projektionen sind die scheinbaren Umrisse Kreise. Links
ist das Bild des Koordinatenursprungs
auf der Tangente an die Hyperbel
in
dargestellt. In beiden Projektionen sind die scheinbaren Umrisse Kreise. Links
ist das Bild des Koordinatenursprungs
 der Mittelpunkt des
Umrisskreises, rechts ist der Hauptpunkt
der Mittelpunkt.
der Mittelpunkt des
Umrisskreises, rechts ist der Hauptpunkt
der Mittelpunkt.
Die Fokalhyperbel eines Ellipsoids schneidet das Ellipsoid in seinen vier Nabelpunkten.
Eigenschaft der Fokalellipse:
Die Fokalellipse mit ihrem Inneren
kann als Grenzfläche
der durch  bestimmten Schar von konfokalen Ellipsoide für
bestimmten Schar von konfokalen Ellipsoide für  als unendlich dünnes Ellipsoid angesehen werden. Es ist dann >
als unendlich dünnes Ellipsoid angesehen werden. Es ist dann >
Ellipsoid in beliebiger Lage
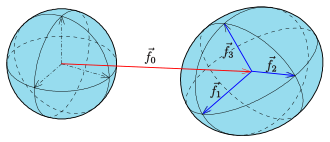
Parameterdarstellung
Eine affine
Abbildung lässt sich durch eine Parallelverschiebung
um
und eine reguläre
3×3-Matrix
beschreiben:
 ,
,
wobei  die Spaltenvektoren der Matrix
sind.
die Spaltenvektoren der Matrix
sind.
Die Parameterdarstellung eines beliebigen Ellipsoids ergibt sich aus der obigen Parameterdarstellung der Einheitskugel und der Beschreibung einer affinen Abbildung:

Umgekehrt gilt: Wählt man einen Vektor
beliebig und die Vektoren
beliebig, aber linear
unabhängig, so beschreibt die obige Parameterdarstellung
in jedem Fall ein Ellipsoid. Bilden die Vektoren
ein Orthogonalsystem,
so sind die Punkte
 die Scheitelpunkte des
Ellipsoids und
die Scheitelpunkte des
Ellipsoids und  die zugehörigen Halbachsen.
die zugehörigen Halbachsen.
Ein Normalenvektor
im Punkt
 ist
ist

Zu einer Parameterdarstellung
eines beliebigen Ellipsoids lässt sich auch eine implizite
Beschreibung  angeben. Für ein Ellipsoid mit Mittelpunkt
im Koordinatenursprung,
d.h.
angeben. Für ein Ellipsoid mit Mittelpunkt
im Koordinatenursprung,
d.h.  ,
ist
,
ist

eine implizite Darstellung.
Bemerkung: Das durch obige Parameterdarstellung
beschriebene Ellipsoid ist in dem eventuell schiefen Koordinatensystem
(Koordinatenursprung),
(Basisvektoren)
die Einheitskugel.
Ellipsoid als Quadrik
Ein beliebiges Ellipsoid mit Mittelpunkt
lässt sich als Lösungsmenge
einer Gleichung

schreiben, wobei
eine positiv
definite Matrix ist.
Die Eigenvektoren
der Matrix
bestimmen die Hauptachsenrichtungen des Ellipsoids und die Eigenwerte von
sind die Kehrwerte der Quadrate der
Halbachsen:  ,
,
 und
und  .
.
Ellipsoid in der projektiven Geometrie
Schließt man den 3-dimensionalen affinen Raum und die einzelnen Quadriken projektiv durch eine Fernebene bzw. Fernpunkte ab, so sind die folgenden Quadriken projektiv äquivalent, d.h., es gibt jeweils eine projektive Kollineation, die die eine Quadrik in die andere überführt:
- Ellipsoid, elliptisches Paraboloid und 2-schaliges Hyperboloid.
Literatur
- W. Böhm: Die FadenKonstruktion der Flächenzweiter Ordnung, Mathemat. Nachrichten 13, 1955.
- D. Hilbert & S. Cohn-Vossen: AnschaulicheGeometrie. Springer-Verlag, 2013, ISBN 3662366851
- O. Staude: Ueber Fadenconstructionen des Ellipsoides. Math. Ann. 20, 147–184 (1882).
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 28.07. 2023