Parameterdarstellung
rot:

grün:

Die Parameter
 und
und  laufen jeweils von 0 bis 3 mit einer Schrittweite von 0,2. Der Parameter
der ersten Darstellung ist die Bogenlänge. Die zweite Darstellung besteht allein
aus rationalen
Funktionen. Beide Darstellungen erfüllen die Kreisgleichung
laufen jeweils von 0 bis 3 mit einer Schrittweite von 0,2. Der Parameter
der ersten Darstellung ist die Bogenlänge. Die zweite Darstellung besteht allein
aus rationalen
Funktionen. Beide Darstellungen erfüllen die Kreisgleichung 
Unter einer Parameterdarstellung versteht man in der Mathematik eine Darstellung, bei der die Punkte einer Kurve oder Fläche als Funktion einer oder mehrerer Variablen, der Parameter, durchlaufen werden. Für die Beschreibung einer Kurve in der Ebene oder im Raum wird ein Parameter benötigt, für die Beschreibung einer Fläche ein Satz von zwei Parametern.
Eine Kurve/Fläche mit Parametern zu beschreiben, wird Parametrisierung genannt. Die Zuweisung von konkreten Werten zu den einzelnen Parametern wird Parametrierung genannt.
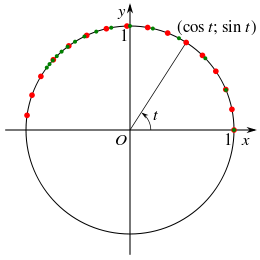
Ein Beispiel ist die Beschreibung des Einheitskreises
um den Ursprung
eines kartesischen
Koordinatensystems in der Ebene. Ein möglicher Parameter ist der Winkel
im Koordinatenursprung (s. nebenstehendes Bild), womit man folgende
Parameterdarstellung des Ortsvektors
 in Abhängigkeit von
erhält:
in Abhängigkeit von
erhält:

Die Beschreibung der Bahnkoordinaten eines bewegten Objektes in Abhängigkeit von der Zeit ist ein Beispiel einer Parameterdarstellung in der Physik.
Ist eine Parameterdarstellung einer Kurve oder Fläche bekannt, kann zu jedem Parameter(satz) direkt der entsprechende Punkt der Kurve oder Fläche angegeben werden. Dagegen ist es meist schwieriger, zu entscheiden, ob ein gegebener Punkt auf der Kurve oder Fläche liegt.
Kurven oder Flächen können auf unterschiedliche Art parametrisiert werden. Bei Kurven ist es oft günstig, die Bogenlänge, gemessen von einem festen Punkt aus entlang der Kurve, als Parameter zu wählen. Die Parameter von Flächen oder höherdimensionalen Gebilden werden oft so gewählt, dass die Parameterlinien orthogonal sind. Auch bei relativ einfachen Gebilden ist es nicht immer möglich, zu jeder Parametrisierung eine Parameterdarstellung der Koordinaten mit Hilfe von elementaren Funktionen zu finden, beispielsweise wenn bei einer Ellipse die Bogenlänge als Parameter gewählt wird.
Eigenschaften der Parameterdarstellungen
Neben der Parameterdarstellung gibt es auch andere Möglichkeiten, Kurven oder
Flächen zu beschreiben. In der Ebene beschreibt beispielsweise der Graph einer Funktion
eine Kurve, im dreidimensionalen Raum kann durch die Funktion  eine Fläche beschrieben werden. Dies sind spezielle Parameterdarstellungen, wenn
man die Funktionsvariablen als Parameter auffasst. Sie sind allerdings nicht zur
Darstellung von Figuren wie Kreisen oder Kugeln geeignet, da sie jedem Punkt der
eine Fläche beschrieben werden. Dies sind spezielle Parameterdarstellungen, wenn
man die Funktionsvariablen als Parameter auffasst. Sie sind allerdings nicht zur
Darstellung von Figuren wie Kreisen oder Kugeln geeignet, da sie jedem Punkt der
 -Achse
oder der -
-Achse
oder der - -Ebene
nur einen Punkt zuordnen können. Mit der Funktion
-Ebene
nur einen Punkt zuordnen können. Mit der Funktion

kann nur ein Halbkreis dargestellt werden. Um einen vollen Kreis zu erhalten,
muss ein weiterer Halbkreis  hinzugefügt werden.
hinzugefügt werden.
Eine weitere Darstellungsmöglichkeit ist die implizite
Beschreibung durch eine Gleichung
der Koordinaten, beispielsweise  .
Der Einheitskreis lässt sich in dieser Form durch die Kreisgleichung
.
Der Einheitskreis lässt sich in dieser Form durch die Kreisgleichung

beschreiben. Diese Form eignet sich gut, um zu prüfen, ob ein gegebener Punkt auf einer Kurve oder Ebene liegt, da lediglich geprüft werden muss, ob die Koordinaten die Gleichung erfüllen. Mit einer solchen impliziten Gleichung können nur Objekte beschrieben werden, deren Dimension um 1 geringer ist als die des Raumes, in dem sie beschrieben werden. Eine Gleichung reicht im dreidimensionalen Raum zur Beschreibung einer Fläche, nicht jedoch, um Kurven zu beschreiben.
Bei einer Parameterdarstellung ist es leicht, einzelne Punkte zu berechnen, die zur parametrisierten Kurve oder Fläche gehören. Sie eignet sich daher gut, um diese Objekte zu zeichnen, beispielsweise in CAD-Systemen. Außerdem lassen sich die berechneten Koordinaten leicht in andere Koordinatensysteme transformieren, so dass Objekte relativ einfach verschoben, gedreht oder skaliert werden können.
In der Physik eignet sich die Parameterdarstellung zur Beschreibung der Bahn
bewegter Objekte, wobei meist die Zeit
als Parameter gewählt wird. Die Ableitung des Ortsvektors  nach der Zeit ergibt dann die zeitabhängige Geschwindigkeit
nach der Zeit ergibt dann die zeitabhängige Geschwindigkeit
 ,
die zweite Ableitung die Beschleunigung
,
die zweite Ableitung die Beschleunigung
 .
Ist umgekehrt eine Anfangsposition
.
Ist umgekehrt eine Anfangsposition  und Anfangsgeschwindigkeit
und Anfangsgeschwindigkeit  zum Zeitpunkt
zum Zeitpunkt  sowie ein (möglicherweise orts- und zeitabhängiges) Beschleunigungsfeld
sowie ein (möglicherweise orts- und zeitabhängiges) Beschleunigungsfeld  gegeben, erhält man die Parameterdarstellung der Bahnkurve durch Integration. Bei einer
konstanten
Beschleunigung wie beim schrägen
Wurf ohne Luftwiderstand ergibt sich beispielsweise folgende Bahnkurve:
gegeben, erhält man die Parameterdarstellung der Bahnkurve durch Integration. Bei einer
konstanten
Beschleunigung wie beim schrägen
Wurf ohne Luftwiderstand ergibt sich beispielsweise folgende Bahnkurve:

Parameterdarstellungen werden auch in der Differentialgeometrie verwendet. Mit Hilfe von Ableitungen der Ortsvektoren nach den Parametern lassen sich Längen, Tangentenvektoren oder Tangentialebenen, Krümmungen, Winkel oder Flächeninhalte bestimmen. Zur Berechnung von Längen, Winkeln und Flächeninhalten in Flächen ist es nicht nötig, eine explizite Parameterdarstellung der Fläche im Raum zu kennen. Es reicht, wenn die Metrik (erste Fundamentalform) der Fläche, die die Längen entlang den Parameterlinien und die Winkel zwischen den Parameterlinien beschreibt, bekannt ist. Dies kann bei gekrümmten Flächen vorteilhaft sein.
Parameterdarstellungen von Geraden und Ebenen
Unter der Parameterdarstellung (oder auch Parameterform) einer Geradengleichung versteht man die Form

und einer Ebenengleichung die Form
 ,
,
wobei  und
und  die reellen Parameter sind. Der Vektor
ist der Ortsvektor eines Punktes
die reellen Parameter sind. Der Vektor
ist der Ortsvektor eines Punktes
 auf der Geraden oder Ebene. Dieser Punkt heißt Aufpunkt oder
Stützpunkt, seinen Ortsvektor
nennt man dann Stützvektor. Den Vektor
auf der Geraden oder Ebene. Dieser Punkt heißt Aufpunkt oder
Stützpunkt, seinen Ortsvektor
nennt man dann Stützvektor. Den Vektor  in der Geradengleichung nennt man den Richtungsvektor der Geraden, die Vektoren
und
in der Geradengleichung nennt man den Richtungsvektor der Geraden, die Vektoren
und  in der Ebenengleichung ebenfalls Richtungsvektoren oder Spannvektoren.
Diese Vektoren dürfen keine Nullvektoren,
die Spannvektoren einer Ebene außerdem nicht kollinear sein. Wenn
in der Geradengleichung ein Einheitsvektor
ist, entspricht der Parameter
dem Abstand eines Geradenpunktes von .
in der Ebenengleichung ebenfalls Richtungsvektoren oder Spannvektoren.
Diese Vektoren dürfen keine Nullvektoren,
die Spannvektoren einer Ebene außerdem nicht kollinear sein. Wenn
in der Geradengleichung ein Einheitsvektor
ist, entspricht der Parameter
dem Abstand eines Geradenpunktes von .
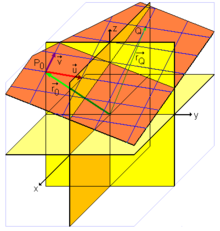
Die Richtungsvektoren einer Ebenengleichung spannen ein affines
Koordinatensystem auf (im nebenstehenden Bild durch das blaue
Koordinatennetz innerhalb der Ebene angedeutet), wobei
und
die affinen Koordinaten darstellen. Den Ortsvektor eines Punktes  der Ebene erhält man, indem man zum Ortsvektor
des Punktes
das -fache
des Vektors
und dann das -fache
des Vektors
addiert.
der Ebene erhält man, indem man zum Ortsvektor
des Punktes
das -fache
des Vektors
und dann das -fache
des Vektors
addiert.
Reguläre Parameterdarstellungen
Eine differenzierbare Parameterdarstellung einer Kurve heißt regulär, wenn ihre Ableitung in keinem Punkt verschwindet; sie muss nicht notwendigerweise injektiv sein. Allgemein heißt eine differenzierbare Parameterdarstellung regulär, wenn sie eine Immersion ist, das heißt, wenn ihre Ableitung überall injektiv ist (das heißt, ihr Rang ist größer gleich der Dimension des Urbilds).
Verallgemeinerung auf höhere Dimension
Die Verallgemeinerung ist naheliegend: Es sei  eine „Karte“ einer
eine „Karte“ einer  -dimensionalen
differenzierbaren
Mannigfaltigkeit
-dimensionalen
differenzierbaren
Mannigfaltigkeit  .
Die Karte ist gegeben durch eine IMG class="text"
style="width: 1.39ex; height: 1.67ex; vertical-align: -0.33ex;" alt="n" src="/svg/a601995d55609f2d9f5e233e36fbe9ea26011b3b.svg">-dimensionale
differenzierbare Parametrisierung: Für Punkte
.
Die Karte ist gegeben durch eine IMG class="text"
style="width: 1.39ex; height: 1.67ex; vertical-align: -0.33ex;" alt="n" src="/svg/a601995d55609f2d9f5e233e36fbe9ea26011b3b.svg">-dimensionale
differenzierbare Parametrisierung: Für Punkte  in
gilt also:
in
gilt also:  mit differenzierbaren Funktionen
mit differenzierbaren Funktionen  .
.
Für eine beliebige Funktion  der Punkte
der Mannigfaltigkeit gilt dann für die Ableitung in Richtung des
Tangentialvektors einer Kurve auf ,
die auf der Karte
den Kurvenparameter λ hat:
der Punkte
der Mannigfaltigkeit gilt dann für die Ableitung in Richtung des
Tangentialvektors einer Kurve auf ,
die auf der Karte
den Kurvenparameter λ hat: 
Dieses Ergebnis ist wegen der Kettenregel unabhängig von der gewählten Parametrisierung.
Parametrisierung von NURBS-Objekten
In der Computergrafik wird unter der Parametrisierung häufig die Verteilung von Kurven, die eine NURBS-Fläche aufspannen, oder von Punkten, die eine Kurve aufspannen, verstanden. Die Flächenlinien heißen Isoparms (Isoparametrische Kurven), die Punkte auf NURBS-Kurven werden Control Vertices (CV) genannt. Die Darstellung dieses Aufbaus entspricht der Parameterdarstellung und trägt in der Branche die Bezeichnung Komponentendarstellung.
In der Visualisierung rechts sind zwei identisch aufgebaute Kurven zu sehen, die keine homogene Parametrisierung aufweisen, also zum Beispiel eine hohe Punktdichte unten links. Der blaue Würfel respektiert die CV-Verteilung nicht, während er die Kurve abfährt. Stattdessen bewegt er sich mit konstanter Geschwindigkeit und geht damit von einer homogenen Parametrisierung aus. Der grüne Würfel rechts dagegen respektiert die unterschiedliche Punktdichte und verlangsamt seine Geschwindigkeit stets da, wo die CVs eng aneinander stehen. Beide Animationen haben die gleiche Länge von 200 Einzelbildern.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 16.05. 2021