Geradengleichung
 und
und  in einem kartesischen Koordinatensystem
in einem kartesischen KoordinatensystemEine Geradengleichung ist eine Gleichung in der Mathematik, die eine Gerade eindeutig beschreibt. Die Gerade besteht aus all den Punkten, deren Koordinaten die Gleichung erfüllen.
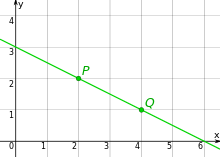
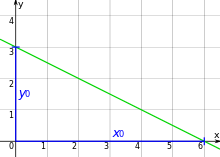
Die Abbildung zeigt eine Gerade durch zwei gegebene Punkte
und
in einem kartesischen
Koordinatensystem. Durch zwei voneinander verschiedene Punkte existiert in
der euklidischen
Geometrie immer genau eine Gerade.
Geraden in der Ebene
Koordinatengleichungen
In einem kartesischen Koordinatensystem werden jedem Punkt
der Ebene zwei Zahlen  und
und  als Koordinaten zugeordnet. Man schreibt
als Koordinaten zugeordnet. Man schreibt  oder
oder  .
Eine Gleichung mit den Variablen
und
beschreibt dann eine Menge von Punkten in der Ebene und zwar die Menge aller
Punkte, deren -
und -Koordinate
die Gleichung erfüllen. Die Schreibweise
.
Eine Gleichung mit den Variablen
und
beschreibt dann eine Menge von Punkten in der Ebene und zwar die Menge aller
Punkte, deren -
und -Koordinate
die Gleichung erfüllen. Die Schreibweise

bedeutet beispielsweise, dass die Gerade  aus allen Punkten
aus allen Punkten  besteht, die die Gleichung
besteht, die die Gleichung  erfüllen. Die entsprechende Mengenschreibweise lautet
erfüllen. Die entsprechende Mengenschreibweise lautet
 .
.
Geraden sind nun dadurch ausgezeichnet, dass es sich bei der zugehörigen Geradengleichung um eine lineare Gleichung handelt. Für solche Gleichungen gibt es eine Reihe unterschiedlicher Darstellungsformen.
Haupt- oder Normalform
Jede Gerade, die nicht parallel zur y-Achse ist, ist der Graph einer linearen Funktion
 ,
,
wobei  und
und  reelle
Zahlen sind.[1]
Die zugehörige Geradengleichung lautet dann
reelle
Zahlen sind.[1]
Die zugehörige Geradengleichung lautet dann
 .
.
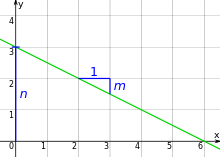
Die Parameter
und
der Geradengleichung haben eine geometrische Bedeutung. Die Zahl
ist die Steigung der Geraden und
entspricht der senkrechten Kathete
des Steigungsdreiecks, dessen waagrechte Kathete die Länge  aufweist. Die Zahl
ist der y-Achsenabschnitt,
das heißt die Gerade schneidet die y-Achse im Punkt
aufweist. Die Zahl
ist der y-Achsenabschnitt,
das heißt die Gerade schneidet die y-Achse im Punkt  .
Ist
.
Ist  ,
so verläuft die Gerade als Ursprungsgerade
durch den Koordinatenursprung und die zugehörige Funktion ist dann eine Proportionalität.
Die Gerade mit der Gleichung
erhält man aus der Geraden mit der Gleichung
,
so verläuft die Gerade als Ursprungsgerade
durch den Koordinatenursprung und die zugehörige Funktion ist dann eine Proportionalität.
Die Gerade mit der Gleichung
erhält man aus der Geraden mit der Gleichung  ,
indem sie um
in Richtung der y-Achse verschoben wird. Diese Verschiebung erfolgt nach oben,
wenn
positiv ist, und nach unten, wenn
negativ ist.
,
indem sie um
in Richtung der y-Achse verschoben wird. Diese Verschiebung erfolgt nach oben,
wenn
positiv ist, und nach unten, wenn
negativ ist.
Geraden, die parallel zur y-Achse verlaufen, sind keine Funktionsgraphen. Sie lassen sich durch eine Gleichung der Form

darstellen, wobei  eine reelle Zahl ist. Eine solche Gerade schneidet die x-Achse im Punkt
eine reelle Zahl ist. Eine solche Gerade schneidet die x-Achse im Punkt  .
.
Zweipunkteform
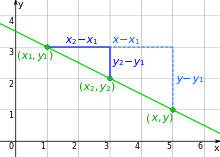
Verläuft die Gerade durch die beiden Punkte  und
und  ,
wobei
,
wobei  und
und  verschieden seien, dann kann die Steigung
der Geraden mit Hilfe des Differenzenquotienten
durch
verschieden seien, dann kann die Steigung
der Geraden mit Hilfe des Differenzenquotienten
durch

berechnet werden. Nach dem Strahlensatz
kann nun statt des Punktes
auch ein beliebiger anderer Punkt
der Geraden gewählt werden, ohne dass die Steigung sich verändert. Damit ergibt
sich die Zweipunkteform

oder äquivalent dazu, indem die Gleichung nach
aufgelöst wird,

und somit
 .
.
Punktsteigungsform
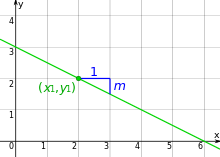
Eine Gerade durch den Punkt
mit der Steigung
wird durch folgende Gleichung beschrieben:
 .
.
Diese Formel kann auch benutzt werden, wenn zwei Punkte bekannt sind, aber
man den Schnittpunkt mit der y-Achse (oben
genannt) nicht explizit bestimmen will.
Koordinatenform
Die Koordinatenform der Geradengleichung in der Ebene lautet
 ,
,
wobei
und  nicht beide 0 sein dürfen.
nicht beide 0 sein dürfen.
Durch Auflösen der Gleichung nach
(falls  )
erhält man hieraus die explizite Form. Die Koordinatenform hat den Vorteil, dass
sie symmetrisch in
und
ist. Es wird also keine Richtung der Geraden bevorzugt. Geraden, die parallel
zur y-Achse sind, spielen keine Sonderrolle.
)
erhält man hieraus die explizite Form. Die Koordinatenform hat den Vorteil, dass
sie symmetrisch in
und
ist. Es wird also keine Richtung der Geraden bevorzugt. Geraden, die parallel
zur y-Achse sind, spielen keine Sonderrolle.
Achsenabschnittsform
Eine spezielle Form der Koordinatenform ist die Achsenabschnittsform.
Schneidet die Gerade die x-Achse im Punkt  und die y-Achse im Punkt
und die y-Achse im Punkt  ,
wobei
,
wobei  und
und  nicht null seien, so lässt sich die Geradengleichung in der Form
nicht null seien, so lässt sich die Geradengleichung in der Form

schreiben. Diese Form heißt Achsenabschnittsform der Geradengleichung mit dem
x-Achsenabschnitt
und dem y-Achsenabschnitt .
Wird die Gleichung nach
aufgelöst, so ergibt sich die explizite Form
 ,
,
wobei das Verhältnis  gerade der Steigung
der Geraden entspricht.
gerade der Steigung
der Geraden entspricht.
Vektorgleichungen
Es gibt auch die Möglichkeit, eine Gerade mit Hilfe der Vektorrechnung zu
beschreiben. Dabei betrachtet man statt der Punkte ihre Ortsvektoren. Der Ortsvektor
 eines Punktes
eines Punktes  wird üblicherweise mit
wird üblicherweise mit  bezeichnet.
bezeichnet.
Parameterform
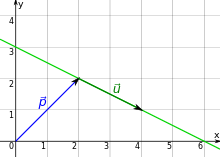
Bei der Parameterform wird keine Bedingung formuliert, die die Koordinaten der Punkte erfüllen müssen, damit sie auf der Geraden liegen, sondern die Punkte der Geraden werden in Abhängigkeit von einem Parameter dargestellt. Jedem Wert des Parameters entspricht dabei ein Punkt der Geraden. Durchläuft der Parameter alle reellen Zahlen, so erhält man alle Punkte der Geraden. In der Parameterform hat eine Gerade die Darstellung
beziehungsweise ausgeschrieben
 .
.
Hierbei ist  der Ortsvektor eines festen
Punktes der Geraden,
der Ortsvektor eines festen
Punktes der Geraden,  der Richtungsvektor
der Geraden und
der Richtungsvektor
der Geraden und  eine Zahl, die angibt, wie lange in diese Richtung gezählt wird. Der Parameter
bildet hierbei die Koordinate eines affinen
Koordinatensystems auf der Geraden, das heißt die Gerade wird mit den Werten
von
beziffert, wobei der Nullpunkt bei
eine Zahl, die angibt, wie lange in diese Richtung gezählt wird. Der Parameter
bildet hierbei die Koordinate eines affinen
Koordinatensystems auf der Geraden, das heißt die Gerade wird mit den Werten
von
beziffert, wobei der Nullpunkt bei  liegt.
liegt.
Normalenform
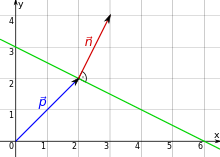
Mit einem Normalenvektor
 ,
der im rechten
Winkel zur Geraden steht, lässt sich die Gerade in Normalenform schreiben:
,
der im rechten
Winkel zur Geraden steht, lässt sich die Gerade in Normalenform schreiben:
 .
.
Darin ist
wieder der Ortsvektor eines Geradenpunkts und  das Skalarprodukt zweier
Vektoren. Ist
das Skalarprodukt zweier
Vektoren. Ist  ein Richtungsvektor einer Geraden, so ist
ein Richtungsvektor einer Geraden, so ist  ein Normalenvektor der Geraden. Bei der hesseschen
Normalform
ein Normalenvektor der Geraden. Bei der hesseschen
Normalform

wird eine Gerade durch einen normierten
und orientierten Normalenvektor  und den Abstand
und den Abstand  vom Koordinatenursprung
beschrieben.
vom Koordinatenursprung
beschrieben.
Geraden im Raum
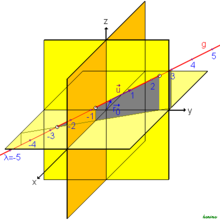
Geraden im Raum lassen sich nicht in der Normalenform darstellen, da sie weder Achsenabschnitte noch einen eindeutig bestimmten Normalenvektor besitzen (zu einer Geraden im Raum gibt es unendlich viele auf ihr senkrecht stehende Richtungen). Gebräuchlich ist die oben vorgestellte Parameterform
 ,
,
wobei  ,
und
nun Vektoren im Raum sind. Mit Hilfe des Vektorprodukts lässt sich
noch eine andere, parameterfreie Geradenform konstruieren, die
Determinantenform
,
und
nun Vektoren im Raum sind. Mit Hilfe des Vektorprodukts lässt sich
noch eine andere, parameterfreie Geradenform konstruieren, die
Determinantenform
 .
.
Hierbei ist
wiederum der Ortsvektor
eines festen Punkts der Geraden und
der Richtungsvektor der Geraden. Da die Differenz  des Ortsvektors
jedes beliebigen Punktes der Geraden und dem Stützvektor
kollinear
zum Richtungsvektor
sein muss (also in dieselbe oder in die entgegengesetzte Richtung zeigt), ergibt
das Vektorprodukt der beiden immer den Nullvektor:
des Ortsvektors
jedes beliebigen Punktes der Geraden und dem Stützvektor
kollinear
zum Richtungsvektor
sein muss (also in dieselbe oder in die entgegengesetzte Richtung zeigt), ergibt
das Vektorprodukt der beiden immer den Nullvektor:
 .
.
Für jeden Vektor ,
der Ortsvektor eines Punktes der Geraden ist, trifft die Gleichung zu, in allen
anderen Fällen ergibt sich nicht der Nullvektor. Ist
ein Einheitsvektor,
so entspricht

genau dem Abstand der Geraden vom Ursprung.
Siehe auch
Literatur
- Ilja Nikolajewitsch Bronstein, Konstantin Adolfowitsch Semendjajew: Taschenbuch der Mathematik. Harri Deutsch Verlag, 24. Auflage 1989, ISBN 3-87144-492-8.
Anmerkungen
- ↑
Der Parameter
wird in der Literatur auch mit ,
 oder
oder  bezeichnet. In Österreich schreibt man meist
bezeichnet. In Österreich schreibt man meist  .
.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 06.05. 2021