Differenzenquotient
Der Differenzenquotient ist ein Begriff aus der Mathematik. Er beschreibt das Verhältnis der Veränderung einer Größe zu der Veränderung einer anderen, wobei die erste Größe von der zweiten abhängt. In der Analysis verwendet man Differenzenquotienten, um die Ableitung einer Funktion zu definieren. In der numerischen Mathematik werden sie zum Lösen von Differentialgleichungen und für die näherungsweise Bestimmung der Ableitung einer Funktion (Numerische Differentiation) benutzt.
Definition
Ist  eine reellwertige
Funktion, die im Bereich
eine reellwertige
Funktion, die im Bereich  definiert ist, und ist
definiert ist, und ist ![[x_{0};x_{1}]\subset D_{f}](/svg/7dedd842b490733e9ed75dced78231a53d716a6a.svg) ,
so nennt man den Quotienten
,
so nennt man den Quotienten

Differenzenquotient von  im Intervall
im Intervall
![[x_{0};x_{1}]](/svg/6be8f47b9de1bd945a2d61f1225363b1c946d4c8.svg) .
.
Schreibt man  und
und  ,
dann ergibt sich die alternative Schreibweise
,
dann ergibt sich die alternative Schreibweise
 .
.
Setzt man  ,
also
,
also  ,
so erhält man die Schreibweise
,
so erhält man die Schreibweise
 .
.
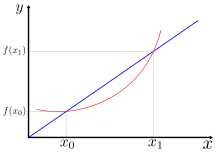
Geometrisch entspricht der Differenzenquotient der Steigung der Sekante des Graphen von
durch die Punkte  und
und  .
Für
.
Für  bzw.
bzw.  wird aus der Sekante eine Tangente
an der Stelle
wird aus der Sekante eine Tangente
an der Stelle  .
.
Differentialrechnung
Differenzenquotienten bilden zusammen mit dem Grenzwertbegriff
die theoretische Grundlage der Differentialrechnung.
Den Grenzwert des Differenzenquotienten für  bezeichnet man als Differentialquotienten
oder Ableitung der Funktion an der Stelle
(kurz:
bezeichnet man als Differentialquotienten
oder Ableitung der Funktion an der Stelle
(kurz:  ),
sofern dieser Grenzwert existiert. Das Berechnen dieses Grenzwerts nennt man
Ableiten oder Differenzieren. Die Tabelle zeigt die Ableitungen
einiger Funktionen. Dabei stimmt der Differenzenquotient jeweils nur für
),
sofern dieser Grenzwert existiert. Das Berechnen dieses Grenzwerts nennt man
Ableiten oder Differenzieren. Die Tabelle zeigt die Ableitungen
einiger Funktionen. Dabei stimmt der Differenzenquotient jeweils nur für  .
.
| Funktion | 
|
Differenzenquotient 
|
Differentialquotient 
|
|---|---|---|---|
| Konstante Funktion | 
|

|
|
| Lineare Funktion | 
|

|
|
| Quadratfunktion | 
|

|

|
| Kubikfunktion | 
|

|

|
| Allgemeine Potenz | 
|

|

|
| Exponentialfunktion | 
|

|

|
Numerische Mathematik
Bei differenzierbaren Funktionen kann der Differenzenquotient als Näherung für die lokale Ableitung benutzt werden. In der Finite-Differenzen-Methode wird diese Eigenschaft zur Lösung von Differentialgleichungen benutzt. Ebenso wird dies für die numerische Differentiation von Funktionen verwendet.
Dabei ist der Differenzenquotient nicht auf die erste Ableitung beschränkt. Es existieren Differenzenquotienten für höhere sowie partielle Ableitungen.
Beispiel
Es sei  .
.
Der Graph von
ist eine Normalparabel.
Wollen wir die Ableitung z.B. in der Nähe der Stelle  ungefähr berechnen, so wählen wir für
ungefähr berechnen, so wählen wir für  einen kleinen Wert, z.B. 0,001. Das ergibt als Differenzenquotienten im
Intervall
einen kleinen Wert, z.B. 0,001. Das ergibt als Differenzenquotienten im
Intervall ![{\displaystyle [12;12{,}001]}](/svg/cc0c32ec7d0ff4a04655630f89e9995878431215.svg) den Wert
den Wert  .
Dieser ist die Sekantensteigung des
Funktionsgraphen im Intervall
und eine Näherung der Steigung der Tangente an der Stelle
.
Dieser ist die Sekantensteigung des
Funktionsgraphen im Intervall
und eine Näherung der Steigung der Tangente an der Stelle  .
.
Varianten
In der Praxis werden verschiedene Varianten des Differenzenquotienten
verwendet, die sich in der Definition von  unterscheiden, etwa um die Genauigkeit bei der Bestimmung des lokalen Wachstums,
z.B. der Sekantensteigung eines Graphen, zu verbessern oder um an den Randstellen einer
Funktion deren Sekantensteigung „rückwärts“ in Richtung des Inneren ihres
Definitionsbereichs zu ermitteln.
unterscheiden, etwa um die Genauigkeit bei der Bestimmung des lokalen Wachstums,
z.B. der Sekantensteigung eines Graphen, zu verbessern oder um an den Randstellen einer
Funktion deren Sekantensteigung „rückwärts“ in Richtung des Inneren ihres
Definitionsbereichs zu ermitteln.
Vorwärtsdifferenzenquotient
Der oben definierte Ausdruck

wird auch Vorwärtsdifferenzenquotient genannt, weil zur Bestimmung des
ersten Funktionswertes, der zur Bildung von
notwendig ist, von  aus nach rechts, also „vorwärts“ gegangen wird.
aus nach rechts, also „vorwärts“ gegangen wird.
Rückwärtsdifferenzenquotient
Analog bezeichnet man den Ausdruck

als Rückwärtsdifferenzenquotienten, da zur Differenzbildung von
aus nach links, also „rückwärts“ gegangen wird, um den zweiten Funktionswert zu
erhalten.
Zentraler Differenzenquotient
Gebräuchlich ist auch der zentrale Differenzenquotient, den man z.B. durch Mittelwertbildung des Vorwärtsdifferenzen- und Rückwärtsdifferenzenquotienten erhält. Er ist durch

gegeben. Bei ihm liegen die zur Differenzbildung verwendeten Stellen
symmetrisch um den -Wert,
für den die Ableitung angenähert werden soll.
Im Gegensatz zu den beiden vorherigen Differenzenquotienten, deren
Fehlerterme beim Annähern der ersten Ableitung an der Stelle
nur von der Klasse  sind, falls die Funktion zweimal differenzierbar ist, liegt der Fehler des
zentralen Differenzenquotienten in
sind, falls die Funktion zweimal differenzierbar ist, liegt der Fehler des
zentralen Differenzenquotienten in  ,
falls die Funktion zusätzlich dreifach differenzierbar in
ist. Zur
,
falls die Funktion zusätzlich dreifach differenzierbar in
ist. Zur  -Notation
siehe Landau-Symbole.
-Notation
siehe Landau-Symbole.
Höhere Differenzenquotienten
Ebenso wie die erste Ableitung durch Differenzenquotienten angenähert werden kann, gilt dies auch für höhere Ableitungen, die über Differenzenquotienten höherer Ordnung approximierbar sind.
Die Herleitung der höheren Differenzenquotienten kann man durch eine rekursive Entwicklungsvorschrift darstellen:

Für die zweite Ableitung kann zum Beispiel der Zusammenhang

verwendet werden, viermalige Differenzierbarkeit der Funktion vorausgesetzt.
Die hinter der -Notation
stehende Konstante kann dabei von
abhängig sein.
Differenzenquotient 3. Ordnung:

Differenzenquotient 4. Ordnung:

Differenzenquotient 5. Ordnung:

Allgemeine Summendarstellung für Differenzenquotienten
Die Differenzenquotienten können allgemein über eine Summe dargestellt werden. Dabei gibt es eine direkte Verbindung zum Pascal'schen Dreieck, bzw. den Binomialkoeffizienten. Die Summendarstellung lässt sich mittels der weiter oben angegebenen rekursiven Entwicklungsvorschrift herleiten.
![{\displaystyle {\frac {d^{n}y}{dx^{n}}}\approx {\frac {\Delta ^{n}y}{\Delta x^{n}}}={\frac {1}{\Delta x^{n}}}\cdot {\begin{cases}\displaystyle \sum _{k=0}^{n}\left[(-1)^{k}{\begin{pmatrix}n\\k\end{pmatrix}}\cdot y_{i+k-n/2}\right]&\quad n{\text{ ist gerade}}\\\\\displaystyle {\frac {1}{2}}\sum _{k=0}^{n-1}\left[(-1)^{k}{\begin{pmatrix}n\\k\end{pmatrix}}\cdot (y_{i+k+1-(n-1)/2}-y_{i+k-1-(n-1)/2})\right]&\quad n{\text{ ist ungerade}}\end{cases}}}](/svg/3be8a3fd80a9f9ebd21acd4b70a6d02f0da6285c.svg)



© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.12. 2018