Dilatation (Geometrie)

Als Dilatation bezeichnet man in der Geometrie eine Kollineation einer affinen Ebene oder eines affinen Raumes, mit der Eigenschaft, dass
- jede Gerade auf eine zu ihr parallele Gerade abgebildet wird.
Dilatationen sind spezielle Affinitäten. Genauer gilt:
- Eine von der Identität verschiedene Dilatation ist entweder eine zentrische Streckung (mit einem Fixpunkt) oder eine Parallelverschiebung (ohne Fixpunkt).
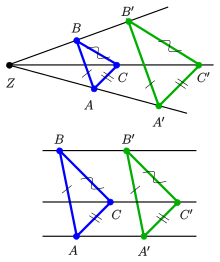
Oben: großer Satz,
unten: kleiner Satz
In der synthetischen Geometrie nennt man zentrische Streckungen auch Homothetien. Sie haben dort einen direkten Bezug zur affinen Form des großen Satzes von Desargues (siehe Bild). Parallelverschiebungen nennt man auch Translationen. Sie haben Bezug zur affinen Form des kleinen Satzes von Desargues. Die Hintereinanderausführung zweier Translationen ist immer auch eine Translation. Die analoge Aussage gilt für Homothetien nicht. Z.B. ist die Hindereinanderausführung zweier Punktspiegelungen eine Translation und keine Homothetie. Alle Dilatationen bilden eine Gruppe und alle Translationen eine Untergruppe davon. Bettet man die zugrunde liegende Ebene/Raum in eine projektive Ebene/Raum ein, so wird aus einer Dilatation eine Zentralkollineation mit der Fern-Gerade/-Hyperebene als Achse. Genauer: aus einer Translation bzw. Homothetie wird dann eine Elation bzw. Homologie, je nachdem, ob das Zentrum auf der Achse liegt oder nicht.
In einem euklidischen Raum lässt sich
- eine Streckung am Nullpunkt durch

- eine Translation durch

beschreiben. Während Translationen Streckenlängen invariant lassen,
verlängert oder verkürzt eine zentrische Streckung Strecken um denselben Faktor.
In der oberen Figur des zweiten Bildes wird das blaue Dreieck durch eine
zentrische Streckung an dem Punkt  auf das grüne Dreieck abgebildet. In der unteren Figur geht das blaue Dreieck
durch eine Translation in das (kongruente) grüne Dreieck über. Dilatationen
gehören zu den Ähnlichkeitsabbildungen.
auf das grüne Dreieck abgebildet. In der unteren Figur geht das blaue Dreieck
durch eine Translation in das (kongruente) grüne Dreieck über. Dilatationen
gehören zu den Ähnlichkeitsabbildungen.
Man beachte: Achsenaffinitäten sind keine Dilatationen.
Definitionen
Die Definition der linearen Algebra ist für desarguesche affine Ebenen äquivalent zur Definition der synthetischen Geometrie, für nichtdesarguesche Ebenen ist nur die synthetische Definition sinnvoll und insofern eine Verallgemeinerung. Es gibt auch für höherdimensionale affine Geometrien rein geometrische Definitionen, die aber dann äquivalent zur Definition der linearen Algebra sind.
Lineare Algebra
Sei  ein Körper oder Schiefkörper,
ein Körper oder Schiefkörper,
 ein Vektorraum bzw. Linksvektorraum über
,
dessen Dimension
über
mindestens 2 ist,
ein Vektorraum bzw. Linksvektorraum über
,
dessen Dimension
über
mindestens 2 ist,  ein affiner Raum über ,
dessen Verbindungsvektoren
ein affiner Raum über ,
dessen Verbindungsvektoren  bilden. Dann heißt eine Affinität
bilden. Dann heißt eine Affinität  Dilatation, wenn ein Skalar
Dilatation, wenn ein Skalar  existiert, so dass für zwei Punkte
existiert, so dass für zwei Punkte  stets
stets  gilt. Der durch die Dilatation eindeutig bestimmte Skalar
gilt. Der durch die Dilatation eindeutig bestimmte Skalar  heißt Streckfaktor von
heißt Streckfaktor von  .
Für
.
Für  ist
eine Translation.
ist
eine Translation.
Synthetische Geometrie
Sei
eine affine Ebene. Eine
Kollineation, also eine geradentreue Bijektion
heißt Dilatation, wenn eine der folgenden äquivalenten Bedingungen
erfüllt ist:
- Jede Gerade
 der Ebene ist zu ihrer Bildgeraden
der Ebene ist zu ihrer Bildgeraden  parallel.
parallel. - Die Fortsetzung von
im projektiven Abschluss von
ist eine projektive
Perspektivität, bei der die Ferngerade eine Fixpunktgerade
ist.
Dilatationsgruppen
Zu einer mindestens zweidimensionalen affinen Geometrie heißt
- die Gruppe der Dilatationen auf
Dilatationsgruppe
 von ,
von , - die Gruppe der Dilatationen mit einem festen Fixpunkt
 (verallgemeinerte) Streckungsgruppe
(verallgemeinerte) Streckungsgruppe  mit Zentrum ,
mit Zentrum , - die Gruppe der Dilatationen ohne Fixpunkt zusammen mit der Identität
Translationsgruppe
 .
.
Eigenschaften
Allgemein
- Jede Dilatation ist eine Affinität.
- Eine Affinität oder Kollineation auf einer mindestens zweidimensionalen affinen Geometrie ist genau dann eine Dilatation, wenn jede Gerade parallel zu ihrer Bildgeraden ist.
- Hat eine Dilatation mehr als einen Fixpunkt, dann ist sie die identische Abbildung.
- Eine Dilatation ist durch die Angabe der Bildpunkte für zwei verschiedene Punkte des Raumes eindeutig bestimmt.
- Bei einer nichtidentischen Dilatation mit einem Fixpunkt
sind genau die Geraden durch
Fixgeraden.
- Bei einer nichtidentischen Translation
 sind genau die Parallelen zu der Verbindungsgeraden
sind genau die Parallelen zu der Verbindungsgeraden
 Fixgeraden, wobei
Fixgeraden, wobei  ein beliebiger Punkt ist.
ein beliebiger Punkt ist. - In einer affinen Geometrie, die das affine Fano-Axiom erfüllt, ist jede Punktspiegelung eine Dilatation.
Struktur der Dilatationsgruppen
- Die Translationsgruppe ist ein Normalteiler
der Dilatationsgruppe
 .
. - Falls zu zwei Punkten
 eine Translation
existiert, die
eine Translation
existiert, die  auf
auf  abbildet
abbildet  ,
dann sind die verallgemeinerten Streckungsgruppen
,
dann sind die verallgemeinerten Streckungsgruppen  in der Dilatationsgruppe konjugierte
Untergruppen – es gilt dann
in der Dilatationsgruppe konjugierte
Untergruppen – es gilt dann  – und also isomorph zueinander.
– und also isomorph zueinander.
Desarguessche Räume
- In einem
 -dimensionalen
affinen Raum (
-dimensionalen
affinen Raum ( )
über einem Schiefkörper
gilt:
)
über einem Schiefkörper
gilt:
- Eine Dilatation
ist genau dann eine Translation, wenn der ihr zugeordnete Streckungsfaktor
ist, ansonsten hat sie einen Fixpunkt
und es gilt
 .
. - Die Translationsgruppe ist ein kommutativer
Normalteiler der Dilatationsgruppe und als Gruppe isomorph zum -Linksvektorraum
der Verbindungsvektoren
 .
. - Die Streckungsgruppen zu beliebigen Zentren sind zueinander und zur
multiplikativen Gruppe des Schiefkörpers isomorph
 .
Dabei wird bei dem Isomorphismus zur multiplikativen Gruppe des Schiefkörpers
jeder Streckung ihr Streckfaktor zugeordnet.
.
Dabei wird bei dem Isomorphismus zur multiplikativen Gruppe des Schiefkörpers
jeder Streckung ihr Streckfaktor zugeordnet. - Die Dilatationsgruppe ist das innere
semidirekte Produkt der Translationsgruppe mit einer beliebigen
Streckungsgruppe:
 .
. - Insbesondere lässt sich jede Dilatation
eindeutig als Verkettung einer Streckung um den fest gewählten Ursprung
 mit einer anschließenden Translation darstellen.
mit einer anschließenden Translation darstellen. - Die Dilatationsgruppe ist isomorph zu einem äußeren semidirekten
Produkt:
 .
Die Operation
.
Die Operation  von
von  auf
auf  ist dabei durch die Linksmultiplikation mit den Streckfaktoren gegeben.
ist dabei durch die Linksmultiplikation mit den Streckfaktoren gegeben. - Ist
ein endlicher
Körper mit
 Elementen, dann enthält die Dilatationsgruppe
Elementen, dann enthält die Dilatationsgruppe  Elemente.
Elemente.
Affine Translationsebenen
- In einer affinen Translationsebene, deren Koordinatenbereich der Linksquasikörper
und deren Schiefkörper der spurtreuen Endomorphismen der Translationsgruppe
 ist, gilt:
ist, gilt:
- Zu jeder Dilatation
existiert eine Konstante
 ,
so dass für beliebige Punkte
,
so dass für beliebige Punkte  stets
stets  gilt. Diese Konstante wird wie im desarguesschen Fall als Streckfaktor
der Dilatation bezeichnet. Eine Dilatation
ist genau dann eine Translation, wenn ihr Streckfaktor
ist, ansonsten hat sie einen Fixpunkt
und es gilt .
gilt. Diese Konstante wird wie im desarguesschen Fall als Streckfaktor
der Dilatation bezeichnet. Eine Dilatation
ist genau dann eine Translation, wenn ihr Streckfaktor
ist, ansonsten hat sie einen Fixpunkt
und es gilt . - Die Translationsgruppe ist ein kommutativer Normalteiler der
Dilatationsgruppe und als Gruppe isomorph zum
 -Linksvektorraum
der Verschiebungen
-Linksvektorraum
der Verschiebungen  .
. - Die Streckungsgruppen zu beliebigen Zentren sind zueinander und zur
multiplikativen Gruppe von
isomorph
 .
Dabei wird bei dem Isomorphismus zur multiplikativen Gruppe
.
Dabei wird bei dem Isomorphismus zur multiplikativen Gruppe  jeder Streckung ihr Streckfaktor zugeordnet.
jeder Streckung ihr Streckfaktor zugeordnet. - Die Dilatationsgruppe ist das innere
semidirekte Produkt der Translationsgruppe mit einer beliebigen
Streckungsgruppe: .
- Insbesondere lässt sich jede Dilatation
eindeutig als Verkettung einer Streckung um den fest gewählten Ursprung
mit einer anschließenden Translation darstellen.
- Die Dilatationsgruppe ist isomorph zu einem äußeren semidirekten Produkt:
 .
Die Operation
von
auf
.
Die Operation
von
auf  ist dabei durch die Linksmultiplikation mit den Streckfaktoren gegeben.
ist dabei durch die Linksmultiplikation mit den Streckfaktoren gegeben. - Ist der Quasikörper
endlich und demnach ein
 -dimensionaler
Vektorraum über seinem Kern, einem endlichen Körper mit
Elementen, dann enthält die Dilatationsgruppe
-dimensionaler
Vektorraum über seinem Kern, einem endlichen Körper mit
Elementen, dann enthält die Dilatationsgruppe  Elemente.
Elemente.
Längen, Winkel, Volumina
Ebenen
- Ist in einer affinen Inzidenzebene
eine Orthogonalitätsrelation
zwischen den Geraden gegeben, dann bleibt die Orthogonalität bei einer
Dilatation
erhalten: Sind
 Geraden der Ebene, dann gilt
Geraden der Ebene, dann gilt  .
Dies bleibt auch dann richtig, wenn die Orthogonalität isotrope Geraden
(
.
Dies bleibt auch dann richtig, wenn die Orthogonalität isotrope Geraden
( )
zulässt.
)
zulässt. - In einer präeuklidischen Ebene gilt:
- Das Bild eines rechtwinkligen Koordinatensystems
 ist wieder ein rechtwinkliges Koordinatensystem
ist wieder ein rechtwinkliges Koordinatensystem  .
Die Orthogonalitätskonstanten bezüglich
und
.
Die Orthogonalitätskonstanten bezüglich
und  sind gleich.
sind gleich. - Ist
eine präeuklidische Ebene mit Quadraten und
ein kartesisches Koordinatensystem, dann ist auch
kartesisch.
- Jede Dilatation ist kreistreu: Das Bild eines Kreises ist ein Kreis.
- Das Bild einer Längenklasse ist eine Längenklasse: Sind die Pfeile
 und
und  gleich lang, dann gilt das auch für ihre Bildpfeile
gleich lang, dann gilt das auch für ihre Bildpfeile  und
und  unter einer Dilatation .
unter einer Dilatation . - Ist der Streckfaktor einer Dilatation 1 oder −1, dann bildet diese Dilatation sogar jede Längenklasse auf sich selbst ab. Mit anderen Worten: Genau die Translationen und die Punktspiegelungen sind längentreue Dilatationen.
- In einer euklidischen Ebene oder allgemeiner in einer angeordneten, frei beweglichen Ebene mit einem Längenmaß für Strecken und einem (orientierten) Winkelmaß gilt:
- Das (orientierte) Winkelmaß ist invariant unter jeder Dilatation.
- Für das Verhältnis der Länge einer Strecke zur Länge der Bildstrecke gilt:
 ,
dabei sind
verschiedene Punkte der Ebene,
der Streckfaktor der Dilatation .
Insbesondere sind genau die Translationen und Punktspiegelungen längentreue
Dilatationen, und bei jeder Dilatation bleiben die Verhältnisse von
zwei beliebigen Streckenlängen erhalten.
,
dabei sind
verschiedene Punkte der Ebene,
der Streckfaktor der Dilatation .
Insbesondere sind genau die Translationen und Punktspiegelungen längentreue
Dilatationen, und bei jeder Dilatation bleiben die Verhältnisse von
zwei beliebigen Streckenlängen erhalten. - Ist die Ebene orientiert, so ist jede Dilatation orientierungserhaltend.
Beachte, dass für Ebenen über nicht archimedisch
geordneten Körpern die Streckfaktoren
auch „unendliche“ Zahlen sein können.
Räume mit Skalarprodukt
In einem mindestens zweidimensionalen affinen Raum
über einem Teilkörper
der reellen Zahlen  ,
in dessen -Vektorraum
der Verbindungsvektoren
ein Skalarprodukt
,
in dessen -Vektorraum
der Verbindungsvektoren
ein Skalarprodukt  erklärt ist, gilt:
erklärt ist, gilt:
- Das Skalarprodukt von Verbindungsvektoren ändert sich für eine Dilatation
immer um den gleichen Faktor, es gilt genauer:
 mit dem Streckfaktor
von .
mit dem Streckfaktor
von . - Ist
ein starrer[1]
Teilkörper der reellen Zahlen, dann gilt sogar eine Art Umkehrung: Ist
 eine Abbildung, die die Eigenschaft
eine Abbildung, die die Eigenschaft  für beliebige Punkte
für beliebige Punkte  und jedes Skalarprodukt auf
mit derselben Konstanten
und jedes Skalarprodukt auf
mit derselben Konstanten  erfüllt, dann ist
erfüllt, dann ist  eine Dilatation von
mit dem Streckfaktor
oder
eine Dilatation von
mit dem Streckfaktor
oder  .
. - Das mit Hilfe des Skalarprodukts definierte (nicht orientierte) Winkelmaß ist invariant unter jeder Dilatation.
- Die mit Hilfe des Skalarproduktes definierte (Quadrat-)Norm jedes
Verbindungsvektors vervielfacht sich um den Betrag des Streckfaktors einer
Dilatation:
 .
. - Insbesondere sind genau die Translationen und Punktspiegelungen
längentreue Dilatationen und bei jeder Dilatation bleiben die
Verhältnisse von zwei beliebigen Streckenlängen erhalten.
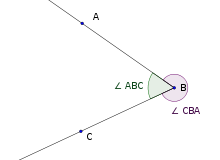 Zur Winkelorientierung:
Zur Winkelorientierung: bilden ein Dreieck,
bilden ein Dreieck,  ist das Zentrum der Drehung um das Winkelmaß
ist das Zentrum der Drehung um das Winkelmaß  ,
bei der der Strahl
,
bei der der Strahl  durch das zu messende Winkelfeld auf
durch das zu messende Winkelfeld auf  gedreht wird.
gedreht wird. - Ist auf dem Raum ein mit der Norm verträgliches,[2]
translationsinvariantes,
 -additives
Volumenmaß
-additives
Volumenmaß  gegeben, dann gilt für messbare Teilmengen
gegeben, dann gilt für messbare Teilmengen  .
. - Das Bild eines rechtwinkligen Koordinatensystems unter einer Dilatation ist wieder ein rechtwinkliges Koordinatensystem.
- In einem orientierten
affinen Raum der Dimension
über einem angeordneten
Teilkörper der reellen Zahlen gilt:
-
- Eine Dilatation ist genau dann orientierungstreu, wenn ihr Streckfaktor
positiv oder die Dimension
des Raumes eine gerade Zahl ist, sonst kehrt sie die Orientierung um.
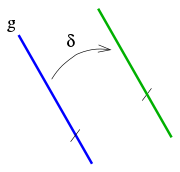
- Der Betrag des orientierten Winkelmaß
eines gerichteten Winkels
 bleibt bei jeder Dilatation erhalten. Vergleiche die Abbildungen rechts und
in der Einleitung! Berücksichtigt man das Vorzeichen
des Winkels, dann gilt genauer
bleibt bei jeder Dilatation erhalten. Vergleiche die Abbildungen rechts und
in der Einleitung! Berücksichtigt man das Vorzeichen
des Winkels, dann gilt genauer  wobei
wobei  die Vorzeichenfunktion
ist.
die Vorzeichenfunktion
ist. - Ist auf dem Raum ein mit der Norm verträgliches,[2]
orientiertes, translationsinvariantes, -additives
Volumenmaß
gegeben, dann gilt für messbare, orientierte Teilmengen
 .
.
- Eine Dilatation ist genau dann orientierungstreu, wenn ihr Streckfaktor
positiv oder die Dimension
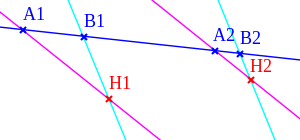
Bildkonstruktion, Eindeutigkeit und Existenz
 vorgegeben oder aus den Vorgaben konstruierbar, die ein nichtentartetes Trapez,
aber kein Parallelogramm bilden. Das Trapez darf auch „überschlagen“ sein. Die
nicht parallelen Trapezseiten schneiden einander im Zentrum
der Dilatation.
vorgegeben oder aus den Vorgaben konstruierbar, die ein nichtentartetes Trapez,
aber kein Parallelogramm bilden. Das Trapez darf auch „überschlagen“ sein. Die
nicht parallelen Trapezseiten schneiden einander im Zentrum
der Dilatation.Im Folgenden ist
stets eine mindestens zweidimensionale affine Geometrie. Die Abbildungen zu den
Konstruktionen in diesem Abschnitt können auch räumlich verstanden
werden: Die (bis zu vier) Vorgabepunkte liegen stets in einer gemeinsamen Ebene
der Geometrie, in der auch das Zentrum liegt, sofern es existiert. Zu Vorgaben,
die nicht in einer gemeinsamen Ebene liegen, existiert keine Dilatation. Soll
nun zu einem weiteren Punkt  der Bildpunkt konstruiert werden, so liegen wieder alle an der Konstruktion
beteiligten Punkte in einer Ebene, die allerdings nicht die durch die
Vorgabepunkte bestimmte sein muss. Insgesamt spielen sich alle hier
beschriebenen „Konstruktionen“ in einem höchstens dreidimensionalen affinen
Teilraum der Geometrie
ab.
der Bildpunkt konstruiert werden, so liegen wieder alle an der Konstruktion
beteiligten Punkte in einer Ebene, die allerdings nicht die durch die
Vorgabepunkte bestimmte sein muss. Insgesamt spielen sich alle hier
beschriebenen „Konstruktionen“ in einem höchstens dreidimensionalen affinen
Teilraum der Geometrie
ab.
Ein Fixpunkt vorgegeben
Ist ein Punkt-Bildpunktpaar  und ein Fixpunkt
gegeben, dann existiert nur dann eine Dilatation
mit
und ein Fixpunkt
gegeben, dann existiert nur dann eine Dilatation
mit  ,
wenn
,
wenn
- die Punkte
 kollinear
und verschieden sind oder
kollinear
und verschieden sind oder  ist oder
ist oder ist.
ist.
Im 2. Fall existiert genau eine Dilatation mit der geforderten Eigenschaft:
Die Identität des Raumes. Im 3. Fall existiert mindestens die Identität, die die
geforderte Eigenschaft hat, im Allgemeinen gibt es weitere zentrale Dilatationen
mit der geforderten Eigenschaft, im 1. Fall existiert höchstens eine
Dilatation mit der geforderten Eigenschaft. Ist
eine desarguesche Geometrie, so existiert eine solche Dilatation, ist
eine affine Translationsebene, dann existiert sie genau dann, wenn
kommensurabel sind. Die Konstruktion kann so erfolgen, wie weiter unten
beim „Hauptfall“ beschrieben. Vergleiche auch die Abbildung rechts.
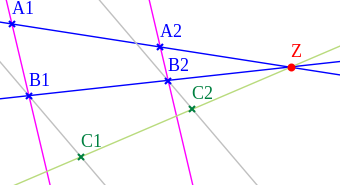
Zwei Punkt-Bildpunktpaare vorgegeben
Sind
vier verschiedene Punkte der Geometrie, dann existiert nur in folgenden Fällen
eine Dilatation
mit 
- Die vier Punkte bilden ein Parallelogramm
 oder
oder - sie bilden ein – eventuell auch überschlagenes – nicht entartetes
Trapez
mit
 ,
aber
,
aber  (Hauptfall) oder
(Hauptfall) oder - sie sind kollinear.
- Kollineare Vorgaben
 ,
die nicht auf der gleichen Geraden wie die Vorgabepunkte
liegen.
,
die nicht auf der gleichen Geraden wie die Vorgabepunkte
liegen.Der 3. Fall kann durch folgende Konstruktion auf einen der anderen Fälle zurückgeführt werden:
- Wähle einen beliebigen Punkt
 außerhalb von
außerhalb von  .
. - Zeichne die Verbindungsgeraden des Dreiecks
 .
. - Die Parallele zu
 durch
durch  schneidet die Parallele zu
schneidet die Parallele zu  durch
durch  in einem Punkt
in einem Punkt  .[3]
.[3]
Damit hat man nun ein Trapez  und damit entweder den 1. oder den 2. Fall der obigen Fallunterscheidung (mit
an der Stelle von
und damit entweder den 1. oder den 2. Fall der obigen Fallunterscheidung (mit
an der Stelle von  ).
Eine Dilatation
erfüllt die ursprünglichen Vorgaben unabhängig von der Wahl des Hilfspunktes
genau dann, wenn sie
).
Eine Dilatation
erfüllt die ursprünglichen Vorgaben unabhängig von der Wahl des Hilfspunktes
genau dann, wenn sie  erfüllt.
erfüllt.
- Die Vorgaben bilden ein nichtentartetes Parallelogramm
verwendet.Im 1. Fall muss die Dilatation eine nichtidentische Translation, also
fixpunktfrei sein, vergleiche die Abbildung rechts. Zu einem beliebigen Punkt
 (sonst verwende )
kann der Bildpunkt so konstruiert werden: Die Parallele zu
(sonst verwende )
kann der Bildpunkt so konstruiert werden: Die Parallele zu  durch
schneidet die Parallele zu
durch
schneidet die Parallele zu  durch
in
durch
in 
Der Konstruktionstext zeigt, dass die Dilatation im Falle ihrer Existenz
durch die Vorgaben eindeutig bestimmt ist. Sie existiert für den 1. Fall stets,
wenn
- eine affine Translationsebene, desarguessche Ebene oder
- eine mindestens dreidimensionale affine Geometrie ist.
Es existieren auch affine Ebenen, die in keiner Richtung beliebige Parallelverschiebungen zulassen: die affinen Ausschnitte von projektiven Ebenen der Lenz-Klasse I.
- Die Vorgaben bilden ein Trapez, das kein Parallelogramm ist
Im 2. Fall ist die Dilatation im Falle ihrer Existenz zentral. Vergleiche die Abbildung zum „Hauptfall“ oben in diesem Abschnitt.
- Das Zentrum
der Dilatation ist der Schnittpunkt der Geraden
mit .
Für einen beliebigen Punkt
(sonst verwende )
konstruiert man den Bildpunkt so:
- Die Parallele zu
durch
schneidet die Fixgerade
 in
in
Aus dem Konstruktionstext folgt, dass höchstens eine Dilatation die Vorgaben
erfüllen kann. Für Vorgaben, die dem Hauptfall entsprechen, existiert stets eine
Dilatation, falls
- eine desarguessche Ebene ist,
- eine mindestens dreidimensionale affine Geometrie ist oder
- eine affine Translationsebene ist und das Trapez mit dem durch es
bestimmten Zentrum
die Voraussetzungen des 1.
Strahlensatzes für Translationsebenen erfüllt.
Literatur
Dilatation, wie in diesem Artikel definiert
- Wendelin Degen und Lothar Profke: Grundlagen der affinen und euklidischen Geometrie. In: Mathematik für das Lehramt an Gymnasien. 1. Auflage. Teubner, Stuttgart 1976, ISBN 3-519-02751-8.
- Max Koecher, Aloys Krieg: Ebene Geometrie. 3., neu bearb. und erw. Auflage. Springer, Berlin / Heidelberg / New York 2007, ISBN 978-3-540-49327-3.
Dilatation mit anderer Bedeutung
- David Hilbert und Stephan Cohn-Vossen: Anschauliche Geometrie. 2. Auflage. Springer, Berlin / Heidelberg / New York 2011, ISBN 978-3-642-19947-9.
- Günter Scheja, Uwe Storch: Lehrbuch der Algebra: unter Einschluß der linearen Algebra. 2., überarb. und erw. Auflage. Teubner, Stuttgart 1994, ISBN 3-519-12203-0.
Anmerkungen
- ↑
Ein Körper heißt hier starr, wenn er außer
der Identität keine Körperautomorphismen zulässt. Starre Teilkörper von
sind z.B.
selbst,
 und die archimedisch geordneten euklidischen Körper.
und die archimedisch geordneten euklidischen Körper. - ↑ a b „Mit der Norm verträglich“ heißt ein (orientiertes) Volumenmaß, wenn das (orientierte) Volumen des Einheitsquaders 1 beträgt.
- ↑ Vergleiche hierzu das 5. Axiom für affine Geometrien.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 20.12. 2020