Euler-Kreisel
Der kräftefreie Kreisel ist ein Kreisel, der momentenfrei um seinen ruhenden Massenmittelpunkt rotiert. Obwohl die Drehbewegung von Kreiseln ausschließlich von den angreifenden Drehmomenten bestimmt wird, hat sich die Bezeichnung kräftefreier Kreisel eingebürgert. Als Leonhard Euler 1750 die Kreiselgleichungen formulierte, konnte er im kräftefreien Fall schon eine Lösung angeben. Zu Ehren Leonhard Eulers wird der kräftefreie Kreisel auch Euler-Kreisel genannt. Er ist neben dem Lagrange-Kreisel und dem Kowalewskaja-Kreisel einer der drei immer mit rationalen Integralen lösbaren Fälle der Kreiselgleichungen.
Die Winkelgeschwindigkeiten lassen sich mit den Jacobi'schen elliptischen Funktionen ausdrücken, die beim symmetrischen Kreisel in den Sinus und Kosinus übergehen. Hier zeigt der Kreisel besonders regelmäßiges und anschauliches Verhalten.
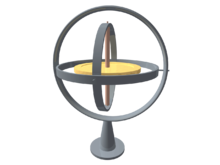
Außer in der Schwerelosigkeit kann ein kräftefreier Kreisel in einem Schwerefeld realisiert werden, indem er in seinem Schwerpunkt drehbar, beispielsweise wie in Abb. 1 kardanisch aufgehängt wird. Mit der Poinsot’schen Konstruktion kann die Bewegung des Euler-Kreisels anschaulich dargestellt werden. Der eulersche Kreisel findet z.B. in Kreiselkompassen und gyroskopischen Steuersystemen technische Anwendung.
Bezeichnungen
Die Bewegungen des kräfefreien Kreisels werden in der Kreiseltechnik Nutation genannt. Die azimutale Drehung wird auch Präzession genannt.
Jeder Starrkörper hat drei ausgezeichnete Achsen, die Hauptträgheitsachsen, die paarweise zueinander senkrecht sind oder orthogonalisierbar sind. Diese Achsen bilden eine Orthonormalbasis, die kurz Hauptachsensystem genannt wird. Bezüglich dieser Achsen gleichen sich Fliehkräfte bei der Drehung genau aus und der Kreisel kann sich gleichförmig frei um sie drehen. Das Maß für den Widerstand des Kreisels gegen Bewegungsänderungen sind seine Trägheitsmomente, die bei diesen Achsen Hauptträgheitsmomente Θ1,2,3 genannt werden. Häufig werden die Hauptträgheitsmomente auch mit A, B und C und die Hauptachsen 1, 2, 3 mit ξ, η und ζ bezeichnet.
Der unsymmetrische Kreisel besitzt drei verschiedene Hauptträgheitsmomente während beim symmetrischen Kreisel zwei Hauptträgheitsmomente überein stimmen. Ist das dritte Hauptträgheitsmoment größer als die beiden anderen, dann wird der symmetrische Kreisel abgeplattet oder oblat genannt, andernfalls gestreckt oder prolat. Beim Kugelkreisel oder sphärischen Kreisel sind alle drei Hauptträgheitsmomente gleich.
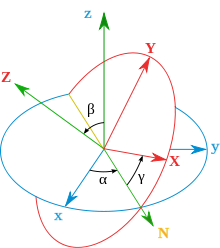
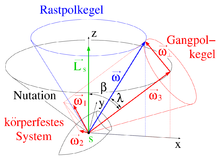
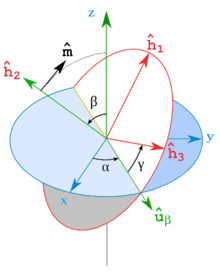
In der Kreiseltheorie werden die Basisvektoren im raumfesten Bezugssystem mit
den Euler’schen
Winkeln in der Standard-x-Konvention (z, x', z") ausgedrückt, siehe Abb. 2.
Bezeichnen die Einheitsvektoren  die raumfeste Standardbasis
(blau in Abb. 2) und
die raumfeste Standardbasis
(blau in Abb. 2) und  die mit dem Körper rotierende, bewegte Basis (rot in Abb. 2), dann lauten die
mitbewegten Basiseinheitsvektoren bezüglich der raumfesten Basis:
die mit dem Körper rotierende, bewegte Basis (rot in Abb. 2), dann lauten die
mitbewegten Basiseinheitsvektoren bezüglich der raumfesten Basis:

Der Zusammenhang mit den Winkelgeschwindigkeiten im Hauptachsensystem ist

Häufig werden die Komponenten ω1,2,3 im Hauptachsensystem auch mit p, q und r bezeichnet.
Bei ϑ = 0 tritt eine Singularität auf, weil dann die Winkel ψ und φ in den Basisvektoren nach den Additionstheoremen nur als Summe ψ + φ vorkommen und somit verschiedene Winkel zur selben Basis führen können.
Allgemeine Eigenschaften der Bewegung kräftefreier Kreisel
Eulersche Kreiselgleichungen
Die Bewegungsfunktion des Kreisels bestimmt sich mit den von Leonhard Euler aufgestellten Kreiselgleichungen. Sie beziehen sich auf das mit dem Körper rotierenden Hauptachsensystem und lauten im kräfefreien Fall

Darin sind jeweils für k=1,2,3
- Θk die Hauptträgheitsmomente,
- Lk := Θkωk die Drehimpulse,
- ωk die Winkelgeschwindigkeiten und
 die Winkelbeschleunigungen
die Winkelbeschleunigungen
im Hauptachsensystem.
Die in den Winkelgeschwindigkeiten oder den Drehimpulsen quadratischen Terme repräsentieren die Momente der Fliehkräfte im rotierenden Körper.
Integrale der Bewegung
Die Drehbewegung eines kräftefreien Kreisels unterliegt neben den Kreiselgleichungen noch zwei Bedingungen.
Zum einen erzwingt die Drehimpulserhaltung im raumfesten xyz-System, dass alle drei Drehimpulskomponenten von

im kräftefreien Fall konstant sind. Das xyz-Koordinatensystem wird so ausgerichtet, dass die z-Koordinate in Richtung des Drehimpulses weist und seine Komponenten in x- und y-Richtung verschwinden. Als zweite Bedingung bleibt die Rotationsenergie Erot gemäß dem Energieerhaltungssatz erhalten.
Im lokalen körperfesten Hauptachsensystem heißt das:

Die Erhaltung von Lx,y,z, L² und Erot ist im Einklang mit obigen Kreiselgleichungen, was durch Zeitableitung der Konstanten und Einsetzen der Kreiselgleichungen nachgewiesen werden kann. Die genannten Konstanten werden in der Kreiseltheorie Integrale genannt und sind hier ganzrationale Funktionen der Winkelgeschwindigkeiten.
Obige Gleichungen definieren Ellipsoide. Die mit den Winkelgeschwindigkeiten ausgedrückten Gleichungsteile stellen in der oberen Gleichung das Drallellipsoid und in der unteren das Energieellipsoid dar. Die mit dem Drehimpuls ausgedrückten Flächen sind in der oberen Gleichung die Drallkugel und in der unteren das MacCullagh-Ellipsoid.
MacCullaghs Deutung der Kreiselbewegung
 .
Die aktuelle Winkelgeschwindigkeit
.
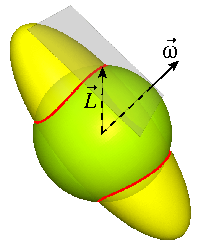
Die aktuelle Winkelgeschwindigkeit  ist senkrecht zur Tangentialebene.
ist senkrecht zur Tangentialebene.Von James MacCullagh stammt eine geometrische Deutung der Kreiselbewegung, die wie die Poinsotsche Konstruktion anschaulich aber nicht so fruchtbar ist wie letztere. Der Drehimpuls ist im raumfesten System konstant und berührt jederzeit das MacCullagh-Ellipsoid, das im körperfesten System aus den Endpunkten aller Drehimpulse besteht, die zur aktuellen Rotationsenergie führen, siehe Abb. 3. Das MacCullagh-Ellipsoid bewegt sich mit dem Kreisel derart, dass der raumfeste Drehimpuls gleichzeitig auf dem Ellipsoid und der Drallkugel ist. Im körperfesten System entstehen dabei die rot gezeichneten Drallpolkurven als Schnittpunkte der Drallachse mit dem MacCullagh-Ellipsoid und der Drallkugel. Das Lot des Stützpunkts auf die Tangentialebene an das MacCullagh-Ellipsoid im Endpunkt des Drehimpulses ist parallel zur aktuellen Winkelgeschwindigkeit. Besagte Tangentialebene ist, anders als die invariable Ebene der Poinsot’schen Konstruktion, nicht raumfest. Die Winkelgeschwindigkeit bildet bei der Bewegung den Raumfesten Rastpolkegel.
Das Kreuzprodukt aus
Winkelgeschwindigkeit und Drehimpuls  ist gleich dem instantan ausgeübten Moment der Fliehkräfte. Dem Moment genau
entgegen gesetzt ist das Moment der Euler-Kräfte, die Ausdruck
von Änderungen der Drehgeschwindigkeit und -achse, also der Ausrichtung des
MacCullagh-Ellipsoids, sind, siehe
Eulersche Kreiselgleichungen in der Kreiseltheorie.
ist gleich dem instantan ausgeübten Moment der Fliehkräfte. Dem Moment genau
entgegen gesetzt ist das Moment der Euler-Kräfte, die Ausdruck
von Änderungen der Drehgeschwindigkeit und -achse, also der Ausrichtung des
MacCullagh-Ellipsoids, sind, siehe
Eulersche Kreiselgleichungen in der Kreiseltheorie.
Wenn der Radius der Drallkugel kleiner als die kleinste Halbachse oder größer als die größte Halbachse des MacCullagh-Ellipsoids ist, dann gibt es keine Schnittkurven und demnach keine Bewegung, die diesem Drehimpuls und dieser Rotationsenergie entspricht, siehe Schranken für Drehimpuls und Rotationsenergie.
Stabilitätsbetrachtungen
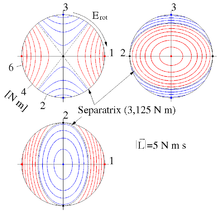
In Abb. 4 ist die Drallkugel und zu verschiedenen Rotationsenergien gehörende Drallpolkurven aus drei Richtungen gesehen gezeichnet. Die Drallpolkurven sind geschlossene Kurven (rot und blau im Bild), die Kreis-, Ellipsen- oder Taco-förmig sein können und wie das MacCullagh-Ellipsoid symmetrisch zu den von den Hauptachsen aufgespannten Ebenen sind. Auf den blauen Kurven finden perizykloidische Bewegungen statt während auf den roten Kurven die Bewegung epizykloidisch genannt wird. Dazwischen befindet sich die Separatrix, die diese beiden Bewegungsformen von einander trennt.
Liegt der Drehimpuls in der Nähe der Hauptträgheitsachse mit dem größten oder dem kleinsten Trägheitsmoment (blaue bzw. rote Punkte in Abb. 4), dann verbleibt er auch in dessen Nähe, denn diese Punkte werden von den Drallpolkurven umringt. Deshalb sind diese Drehachsen stabile Drehachsen freier Drehungen. Ihre Schnittpunkte mit der Drallkugel sind elliptische Fixpunkte einer autonomen Differentialgleichung.
Liegt der Drehimpuls genau auf der 2-Achse (schwarzer Punkt), dann verbleibt er dort, andernfalls entfernt er sich vom Schnittpunkt, denn dieser wird nicht von den Drallpolkurven umkreist. Die 2-Achse ist eine instabile Drehachse, sie trifft das MacCullagh-Ellipsoid in einem hyperbolischen Fixpunkt oder Sattelpunkt der zugehörigen autonomen Differentialgleichung (siehe auch Stabilität der Bewegung unsymmetrischer Kreisel weiter unten). Die Bewegung auf der Separatrix ist instabil, denn bei der kleinsten Störung wird die Bahn epi- oder perizykloidisch.
Wenn die Hauptträgheitsmomente Θ1,2 übereinstimmen, womit der Kreisel ein symmetrischer wird, dann ist das MacCullagh-Ellipsoid ein Rotationsellipsoid um die 3-Achse, die Separatrix wird zu einem Großkreis in der 1-2-Ebene und die Drallpolkurven sind Kleinkreise parallel zu dieser. Die Drehung um die Figurenachse (Symmetrieachse 3) ist jedenfalls stabil, denn die Drallpolkurven umringen als Kleinkreise diese Achse. Die zur Figurenachse senkrechten, äquatorialen Hauptachsen weisen komplexes Stabilitätsverhalten auf:
- Bezüglich der Winkelgeschwindigkeiten
 und des Neigungswinkes ϑ sind Drehungen um eine äquatoriale Achse
stabil,
und des Neigungswinkes ϑ sind Drehungen um eine äquatoriale Achse
stabil, - Bezüglich der Winkel ψ und φ und den Winkelgeschwindigkeiten ω1,2 sind Drehungen um eine äquatoriale Achse instabil.
Denn bei Störung der Drehung um die 1-Achse mittels einer kleinen Winkelgeschwindigkeit um die 3-Achse wird die Drallpolkurve zu einem Kleinkreis um die 3-Achse und die Drehachse umläuft parallel zur 1-2-Ebene die Figurenachse. Sie bleibt also nicht in der Nähe der 1-Achse was Instabilität von ω1 bezüglich Störung von ω3 bedeutet. Eine kleine Störung der axialen Winkelgeschwindigkeit ω3 oder des Neigungswinkels ϑ führt jedoch zu einer klein bleibenden Veränderung. In gleicher Weise werden die anderen Größen auf Stabilität gegenüber Störungen untersucht.
Die Bewegungen des idealen Kugelkreisels sind zwar stabil, sie können jedoch bei kleinen Imperfektionen instabil werden, wenn durch sie der Kreisel aufhört ein Kugelkreisel zu sein. Deswegen ist der Kugelkreisel für technische Anwendungen ungeeignet.
Die Bewegungen des Drehimpulses im lokalen Bezugssystem
Mangels äußerer Einwirkungen macht der kräfefreie Kreisel keine Sprünge. Die lokalen Komponenten des Drehimpulses sind somit Lipschitz-stetig und daher können sich die Trajektorien des Drehimpulses nach dem Satz von Picard-Lindelöf nicht schneiden. Diese Bedingung ist auf der Separatrix verletzt (in Abb. 4 schwarz gestrichelt).
Der Drehimpuls durchwandert die in Abb. 3 und 4 gezeichneten Drallpolkurven
ohne jemals stillzustehen oder gar die Umlaufrichtung zu wechseln. Denn abseits
der Hauptträgheitsachsen verschwindet höchstens eine Komponente des Drehimpulses
und daher können die lokalen Geschwindigkeiten  den Kreiselgleichungen zufolge nicht alle drei auf einmal null sein.
den Kreiselgleichungen zufolge nicht alle drei auf einmal null sein.
Im Sonderfall der Separatrix bildet sich eine aperiodische Bewegung aus, denn der Drehimpuls kann die Schnittpunkte auf der 2-Achse nicht überschreiten. Es zeigt sich, dass sich die Hauptträgheitsachse mit dem mittleren Hauptträgheitsmoment auf einer Loxodrome asymptotisch der vom Drehimpuls gegebenen Achse nähert, siehe Bewegung auf der Separatrix unten.
Wenn die Rotationsenergie abnimmt, beispielsweise durch Dissipation, wird die Drehachse in Richtung der Achse mit dem größten Trägheitsmoment wandern, was in Abb. 4 die 3-Achse ist, denn dort berührt das MacCullagh-Ellipsoid mit der kleinsten Energie die Drallkugel.
Kräftefreier symmetrischer Kreisel
Beim symmetrischen Kreisel sind per definitionem zwei der drei Hauptträgheitsmomente gleich. Die Bewegung ist besonders regelmäßig und anschaulich. Ohne Beschränkung der Allgemeinheit wird hier von Θ1=Θ2=:Θ0 und Drehung um die 3-Achse – der Figurenachse – ausgegangen.
Beschreibung der Bewegung
Beim symmetrischen Kreisel vereinfacht sich die dritte Kreiselgleichung im
kräftefreien Fall zu  ,
sodass die Winkelgeschwindigkeit ω3 und somit auch der
Drehimpuls L3 konstant sind. Die zwei anderen
Kreiselgleichungen bilden das lineare gewöhnliche
Differentialgleichungssystem
,
sodass die Winkelgeschwindigkeit ω3 und somit auch der
Drehimpuls L3 konstant sind. Die zwei anderen
Kreiselgleichungen bilden das lineare gewöhnliche
Differentialgleichungssystem

mit konstantem Koeffizient  .
Zeitableitung der Gleichungen führt auf zwei entkoppelte Differentialgleichungen
.
Zeitableitung der Gleichungen führt auf zwei entkoppelte Differentialgleichungen
 ,
deren allgemeine Lösung wie folgt darstellbar ist:
,
deren allgemeine Lösung wie folgt darstellbar ist:

Die Werte ω1,2(0) sind Anfangsbedingungen zur Zeit t=0. Falls ω3(0)=0 und/oder ω1(0)=ω2(0)=0 gilt, so bleiben ω1 und ω2 konstant und der Kreisel führt eine konstante Drehbewegung aus oder bleibt im Spezialfall ω1,2,3(0)=0 in Ruhe.

Für die Skizzierung der allgemeinen Bewegung wird im Massenmittelpunkt des
Kreisels zum Zeitpunkt t=0 ein kartesisches
Koordinatensystem mit x-, y- und z-Achse so gelegt, dass die Figurenachse
und die Winkelgeschwindigkeit in der xz-Ebene liegen, siehe Abb. 5. Das
Hauptachsensystem sei anfänglich so ausgerichtet, dass die Winkelgeschwindigkeit
und die Figurenachse in der 13-Ebene liegen und einen Winkel λ einschließen (in
Abb. 5 anders dargestellt). Dann ist ω1(0)=ω sin(λ),
ω2(0)=0 und ω3(0)=ω cos(λ) mit dem
Betrag  der Winkelgeschwindigkeit. Die Hauptachsen werden wie bei den Euler-Winkeln
eingeführt mit
der Winkelgeschwindigkeit. Die Hauptachsen werden wie bei den Euler-Winkeln
eingeführt mit  bezeichnet.
bezeichnet.
Die oben angegebene Lösung der Kreiselgleichungen ergibt mit den getroffenen Anfangsbedingungen:

Der Differenzvektor  hat den konstanten Betrag
hat den konstanten Betrag  und rotiert um die Figurenachse mit der Drehzahl
und rotiert um die Figurenachse mit der Drehzahl
 .
Die Figurenachse und die Winkelgeschwindigkeit schließen daher immer denselben
Winkel, nämlich λ, ein. Die Winkelgeschwindigkeit führt im körperfesten
Hauptachsensystem eine Drehbewegung um die Figurenachse aus und formt dabei den
körperfesten Gangpolkegel, Polhodiekegel, Laufkegel oder Polkegel (rot in Abb. 5
und 6).
.
Die Figurenachse und die Winkelgeschwindigkeit schließen daher immer denselben
Winkel, nämlich λ, ein. Die Winkelgeschwindigkeit führt im körperfesten
Hauptachsensystem eine Drehbewegung um die Figurenachse aus und formt dabei den
körperfesten Gangpolkegel, Polhodiekegel, Laufkegel oder Polkegel (rot in Abb. 5
und 6).
Im raumfesten System ist der Drehimpuls

um den Massenmittelpunkt konstant (grün in Abb. 5) und bildet die
Präzessionsachse.
An letzterer Zerlegung ist erkennbar, dass der Drehimpuls in der von der
Figurenachse und der Winkelgeschwindigkeit
aufgespannten Ebene, der Präzessionsebene,
liegt. Die Bewegung des kräftefreien symmetrischen Kreisels kann also nur darin
bestehen, dass die Figurenachse und die Winkelgeschwindigkeit gemeinsam um die
raumfeste Präzessionsachse drehen.
Das Koordinatensystem kann nun – wie in Abb. 5 – so ausgerichtet werden, dass
der Drehimpuls in z-Richtung weist und somit  gilt. Weil sich die Rotationsenergie
gilt. Weil sich die Rotationsenergie

ebenfalls nicht ändert, ist auch die z-Komponente ωz der Winkelgeschwindigkeit in Richtung des Drehimpulses konstant. Damit bewegt sich die Winkelgeschwindigkeit auch um die raumfeste z-Richtung auf einem Kegel, dem raumfesten Rastpolkegel, Festkegel, Herpolhodiekegel oder Spurkegel (blau in Abb. 5 und 6, dort „raumfester Gangpolkegel“ genannt).
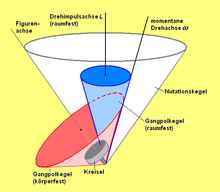
Die drei Vektoren Drehimpuls, Figurenachse und Winkelgeschwindigkeit ändern ihre relative Position nicht: der Gangpolkegel rollt auf dem Rastpolkegel ab. Beim prolaten (gestreckten) Kreisel ist Θ0 > Θ3 und der Gangpolkegel rollt wie in Abb. 5 außen auf dem Rastpolkegel ab. Beim oblaten (abgeplatteten) Kreisel ist Θ3 > Θ0 und der Gangpolkegel rollt wie in Abb. 6 innen auf dem Rastpolkegel ab.
Das Abrollen ist sogar schlupflos, denn die gemeinsame Mantellinie von Rastpol- und Gangpolkegel ist die von der Winkelgeschwindigkeit gestellte momentane Drehachse, die durch den ruhenden Massenmittelpunkt geht (in Abb. 6 anders dargestellt). Die Partikel des Kreisels auf der Drehachse stehen still solange sie das tun, der Rastpolkegel ruht sowieso, und Schlupf zwischen Gangpol- und Rastpolkegel ist mithin ausgeschlossen.
Der Winkel ϑ zwischen der Figurenachse und dem Drehimpuls sowie die z-Komponente der Winkelgeschwindigkeit können mit der mechanischen Analyse im folgenden Abschnitt ermittelt werden.
Bewegungsfunktion des symmetrischen Kreisels
Wenn, wie im vorherigen Abschnitt, der Drehimpuls in Richtung der z-Achse weist und die Winkelgeschwindigkeit ω sowie der Winkel λ vorgegeben werden (alle diese Größen sind Konstanten der Bewegung), dann berechnen sich der Drehimpuls

die Winkelgeschwindigkeiten

und die Winkel

in Radiant. Die Funktion tan ist der Tangens und arctan seine Arkusfunktion. Die von der Figurenachse und der Winkelgeschwindigkeit aufgespannte Präzessionsebene, in der auch den Drehimpuls liegt, schließt mit der xz-Ebene den Winkel

ein.
| Beweis |
Der Drehimpuls ist in Abwesenheit äußerer Momente konstant und weise
in einem raumfesten
kartesischen xyz-Koordinatensystem in z-Richtung. Dann ergibt sich mit
den Euler-Winkeln oben:
 findet keine Drehung statt (wegen L = 0) und bei sin(ϑ) = 0
dreht der Kreisel gleichförmig um seine Figurenachse. Ansonsten ergibt
sich
findet keine Drehung statt (wegen L = 0) und bei sin(ϑ) = 0
dreht der Kreisel gleichförmig um seine Figurenachse. Ansonsten ergibt
sich
|
| Anfangsbedingungen |
|---|
Zur Zeit t=0 ist  und diesen Wert behält ω3. Der Winkel ϑ kann nun
als Funktion des Winkels λ ausgedrückt werden:
und diesen Wert behält ω3. Der Winkel ϑ kann nun
als Funktion des Winkels λ ausgedrückt werden:
 und
und  folgt für den Drehimpuls:
folgt für den Drehimpuls:
 für den Winkel φ erfüllt werden, sodass
für den Winkel φ erfüllt werden, sodass  .
Die Winkelgeschwindigkeit lautet mit den
Additionstheoremen zur Zeit t=0:
gesetzt, sodass sich .
Die Winkelgeschwindigkeit lautet mit den
Additionstheoremen zur Zeit t=0:
gesetzt, sodass sich
 sowie ω3 = ω cos(λ):
sowie ω3 = ω cos(λ):
|











Kräftefreier unsymmetrischer Kreisel
Unsymmetrische Kreisel besitzen per definitionem drei verschiedene Hauptträgheitsmomente. Dreht sich ein solcher Kreisel um die 3-Achse, dann kann diese Bewegung instabil oder stabil sein. Im ersteren Fall nehmen kleine Störungen exponentiell zu und der Kreisel beginnt zu taumeln, was im nächsten Abschnitt begründet wird. Im stabilen Fall bilden sich periodische Bewegungsformen des zweiten Abschnitts aus. Über den Spezialfall der Bewegung auf der Separatrix, die im Abschnitt Allgemeine Eigenschaften der Bewegung krätefrei rotierender Kreisel definiert wurde, wird am Schluss informiert.
Stabilität der Bewegung unsymmetrischer Kreisel
Die Hauptachsen mit dem größten oder dem kleinsten Hauptträgheitsmoment sind stabile Drehachsen. Dies ist spätestens seit 1851 bekannt und mit einem rotierend in die Höhe geworfenen Tischtennisschläger auch leicht zu demonstrieren. Im Englischen ist die Aussage entsprechend als „Satz vom Tennisschläger“ (tennis racket theorem) geläufig. Nachdem der sowjetische Kosmonaut Wladimir Dschanibekow während eines Raumfluges 1985 die Bewegung eines Bauteils um seine instabile Hauptträgheitsachse beobachtet hat, wurde der Sachverhalt genauer untersucht und wird seitdem gelegentlich „Dschanibekow-Effekt“ genannt.
Um die Stabilität der Drehachsen zu prüfen, soll der Kreisel zunächst vor
allem um die 3-Achse rotieren:  und
und  .
Nun lauten die Kreiselgleichungen
.
Nun lauten die Kreiselgleichungen

Wie im Abschnitt Beschreibung der Bewegung entsteht durch Ableitungen nach der Zeit und mit der näherungsweisen Konstanz der Winkelgeschwindigkeit ω3:

Falls k negativ ist, kommt es zu positiver Rückkopplung der Winkelgeschwindigkeiten und damit zum Verlassen der Rotation um die 3-Achse hin zu einem Taumeln. Falls k positiv ist, ergeben sich periodische Bewegungsformen um die 3-Achse. Dafür müssen die Hauptträgheitsmomente Θ1,2 entweder beide größer oder beide kleiner als das dritte Hauptträgheitsmoment Θ3 sein, woraus die obige Aussage über die Stabilität der Achsen folgt.
Bei sehr unterschiedlichen Hauptträgheitmomenten kann auch eine stabile Drehachse instabil erscheinen. Die Poinsotsche Konstruktion gibt ein geometrisches Stabilitätskriterium für die Hauptträgheitsachsen, das diesem Phänomen gerecht wird.
Bewegungsfunktion des unsymmetrischen Kreisels
Die Hauptträgheitsmomente seien derart nummeriert, dass Θ1< Θ2< Θ3 gilt. Dann können die Kreiselgleichungen im kräftefreien Fall mit den Jacobi’schen elliptischen Funktionen sn, cn und dn erfüllt werden. Aus der Rotationsenergie und dem Betragsquadrat des Drehimpulses

ergeben sich die Winkelgeschwindigkeiten

mit den Amplituden

der Frequenz a und dem elliptischen Modul k

Es zeigt sich

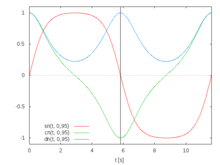
sodass die vorgenannten Konstanten reell sind. Die Funktionen sn und cn sind periodisch mit der Periode 4K und dn mit der Periode 2K, siehe Abb. 8. Dabei ist K das vollständige elliptische Integral erster Art:

Damit ist die Winkelgeschwindigkeit periodisch mit der Periodenlänge  .
Nach dieser Zeit ist die Winkelgeschwindigkeit wieder in ihren Ausgangszustand
zurückgekehrt:
.
Nach dieser Zeit ist die Winkelgeschwindigkeit wieder in ihren Ausgangszustand
zurückgekehrt:  Allerdings gilt das nicht für den Kreisel als Ganzem: Dieser kehrt im
Allgemeinen nicht in eine Anfangslage zurück.
Allerdings gilt das nicht für den Kreisel als Ganzem: Dieser kehrt im
Allgemeinen nicht in eine Anfangslage zurück.
Die eulerschen Winkel, wie sie im Abschnitt Bezeichnungen eingeführt wurden – ergeben sich aus

Die Formeln bleiben gültig, wenn die Hauptträgheitsmomente die umgekehrte Reihenfolge Θ1 > Θ2 > Θ3 aufweisen. Allerdings kehren die Differenzen

dann ihr Vorzeichen um.
Anders als beim kräftefreien symmetrischen Kreisel sind die
Winkelgeschwindigkeiten
und der Winkel ϑ zwischen dem Drehimpuls und der 3-Achse nicht
konstant. Im Spezialfall Θ1=Θ2 ist
A1=A2 und k=0, sodass die
elliptischen Funktionen sn und cn in die harmonischen Funktionen sin bzw. cos
übergehen und dn≡1 ist. Dann geht die hiesige Lösung in die des symmetrischen
Kreisels über.
| Beweis |
Zunächst wird gezeigt, dass die Winkelgeschwindigkeiten den eulerschen
Kreiselgleichungen genügen. Die Jacobi’schen elliptischen Funktionen
erfüllen die Differentialgleichungen
 und
und  ergibt sich daraus im Einklang mit den Kreiselgleichungen:
ergibt sich daraus im Einklang mit den Kreiselgleichungen:
Vergleich der Komponenten des Drehimpulses in euler-Winkeln (siehe Bezeichnungen)
liefert im mitbewegten System  und cn²=1-sn² aus
und cn²=1-sn² aus
|




Bewegung auf der Separatrix
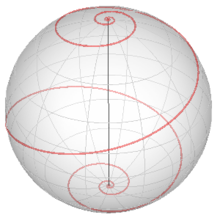
Auf der Separatrix ist 2Θ2 Erot = L² und die Bewegung aperiodisch, weil die Winkelgeschwindigkeit keinen Zustand ein zweites Mal einnimmt. Die Bewegung des Kreisels ist hier dadurch gekennzeichnet, dass die von der 2-Achse und dem Drehimpuls aufgespannte Ebene mit konstanter Winkelgeschwindigkeit L/Θ2 um die Drehimpulsachse kreist und der Endpunkt der 2-Achse sich auf einer Loxodrome mit dem Richtungswinkel

der durch den Drehimpuls definierten Achse nähert, siehe Abb. 9.
Die Formeln des voran gegangenen Abschnitts sind hier zwar gültig, aber weil der elliptische Modul den Extremwert

annimmt, gehen die elliptischen Funktionen in die aperiodischen Hyperbelfunktionen über:
 und
und 
Die Frequenz und die Winkelgeschwindigkeiten des voran gegangenen Abschnitts spezialisieren sich damit zu:

Mit fortschreitender Zeit gehen ω1 und ω3 gegen null und ω2 gegen L/Θ2. Die Bewegung kommt einer Drehung um die 2-Achse beliebig nah ohne diesen Zustand jemals zu erreichen. In der Realität wird diese Bewegungsform kaum auftreten, denn bei der kleinsten Abweichung vom Idealfall 2Θ2 Erot = L² ist k ≠ 1 und die Winkelgeschwindigkeiten werden zu den periodischen des voran gegangenen Abschnitts. Die Bewegung auf der Separatrix ist instabil. Eine Bewegung nahe der Separatrix zeigt der Dschanibekow-Effekt.
 und Meridian
und Meridian  (ψ=α, ϑ=β und φ=γ).
(ψ=α, ϑ=β und φ=γ).Für die Berechnung der Bewegung wird, anders als im vorigen Abschnitt, der
Ansatz  für das lokale Basissystem benutzt, siehe Abb. 10 und vgl. Abb. 2.
für das lokale Basissystem benutzt, siehe Abb. 10 und vgl. Abb. 2.
Die eulerschen Winkel – siehe Bewegungsfunktion des symmetrischen Kreisels – ergeben sich bei einem Drehimpuls in z-Richtung und einem Start mit ω2=0 zu

Die von der 2-Achse und dem Drehimpuls aufgespannte Ebene kreist mit konstanter Winkelgeschwindigkeit L/Θ2 um die Drehimpulsachse und der Winkel ϑ geht mit fortschreitender Zeit gegen null.
| Beweis |
Im Basissystem
 mit
mit  aus
aus  bestimmt werden zu
bestimmt werden zu
 und der Meridian hat somit die Richtung
und der Meridian hat somit die Richtung
|


![{\displaystyle {\begin{aligned}{\vec {\omega }}=&[{\dot {\psi }}\sin(\vartheta )\sin(\varphi )+{\dot {\vartheta }}\cos(\varphi )]{\hat {e}}_{1}+[{\dot {\psi }}\sin(\vartheta )\cos(\varphi )-{\dot {\vartheta }}\sin(\varphi )]{\hat {e}}_{2}+[{\dot {\psi }}\cos(\vartheta )+{\dot {\varphi }}]{\hat {e}}_{3}\\=&[\underbrace {{\dot {\psi }}\sin(\vartheta )\sin(\varphi )+{\dot {\vartheta }}\cos(\varphi )} _{\omega _{3}}]{\hat {h}}_{3}+[\underbrace {{\dot {\psi }}\sin(\vartheta )\cos(\varphi )-{\dot {\vartheta }}\sin(\varphi )} _{\omega _{1}}]{\hat {h}}_{1}+[\underbrace {{\dot {\psi }}\cos(\vartheta )+{\dot {\varphi }}} _{\omega _{2}}]{\hat {h}}_{2}\,.\end{aligned}}}](/svg/50baec5d9b3631629c8ed41245b2c197ed8808ab.svg)



![{\displaystyle {\begin{aligned}\cos \eta =&{\frac {{\dot {\hat {h}}}_{2}\cdot {\hat {m}}}{|{\dot {\hat {h}}}_{2}||{\hat {m}}|}}={\frac {\omega _{1}\sin(\varphi )-\omega _{3}\cos(\varphi )}{\sqrt {\omega _{1}^{2}+\omega _{3}^{2}}}}={\frac {\left[\tan(\varphi )-{\frac {\omega _{3}}{\omega _{1}}}\right]\cos(\varphi )}{\sqrt {1+{\frac {\omega _{3}^{2}}{\omega _{1}^{2}}}}}}={\frac {\tan(\varphi )-{\frac {\Theta _{1}}{\Theta _{3}}}\tan(\varphi )}{{\sqrt {1+{\frac {\Theta _{1}^{2}}{\Theta _{3}^{2}}}\tan ^{2}(\varphi )}}{\sqrt {1+\tan ^{2}(\varphi )}}}}\\=&{\frac {{\frac {\Theta _{3}-\Theta _{1}}{\Theta _{3}}}{\sqrt {\frac {\Theta _{3}(\Theta _{2}-\Theta _{1})}{\Theta _{1}(\Theta _{3}-\Theta _{2})}}}}{{\sqrt {1+{\frac {\Theta _{1}^{2}}{\Theta _{3}^{2}}}{\frac {\Theta _{3}(\Theta _{2}-\Theta _{1})}{\Theta _{1}(\Theta _{3}-\Theta _{2})}}}}{\sqrt {1+{\frac {\Theta _{3}(\Theta _{2}-\Theta _{1})}{\Theta _{1}(\Theta _{3}-\Theta _{2})}}}}}}={\sqrt {\frac {(\Theta _{3}-\Theta _{2})(\Theta _{2}-\Theta _{1})}{\Theta _{2}(\Theta _{1}+\Theta _{3}-\Theta _{2})}}}\end{aligned}}}](/svg/4d22a7e7eda3935701484da0b53d6d1296437d3a.svg)

Einfluss der Reibung
Der kräfefreie Kreisel ist eine Idealisierung, die unter den Bedingungen auf der Erde nur näherungsweise zu realisieren ist. Zum einen treten in den Lagern, die den Kreisel gegen die Gewichtskraft halten, unvermeidlich Reibmomente auf und ebenso führt die Haftbedingung der Luft an festen Oberflächen zu abbremsender Wechselwirkung mit der Umgebungsluft.
Der Einfluss der Reibung in der kardanischen Aufhängung, wie in Abb. 1, macht sich beim symmetrischen Kreisel, je nachdem er gestreckt oder abgeplattet ist, unterschiedlich bemerkbar:
- Beim gestreckten Kreisel nimmt der Neigungswinkel ϑ gegenüber dem Drehimpuls zu und die Figurenachse wird zu einer labilen Drehachse.
- Beim abgeplatteten Kreisel nimmt der Neigungswinkel ϑ ab und die Figurenachse bleibt eine stabile Drehachse.
Beiden Kreiselformen ist gemeinsam, dass die Eigendrehgeschwindigkeit ω3 mit der Zeit abnimmt.
Die Luftreibung bremst ebenfalls die Eigendrehgeschwindigkeit und wirkt unterschiedlich auf gestreckte oder abgeplattete Kreisel:
- Beim gestreckten Kreisel richtet sich die Drehachse zunehmend senkrecht zur Figurenachse aus, die auch hier eine instabile Drehachse wird.
- Beim abgeplatteten Kreisel wandert die Drehgeschwindigkeit zur Figurenachse hin, die eine stabile Drehachse bleibt.
Siehe auch
- Trägheitsellipsoid informiert über den Zusammenhang von Trägheits-, Energie- und Drallellipsoid


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.09. 2021