Kreisel

Allgemeines
Ein Kreisel, Gyroskop, Kreiselinstrument,..., auch Kreiselstabilisator ist ein mechanisches Gerät, das zum Messen, Aufrechterhalten oder Ändern der Ausrichtung eines Geräts oder Fahrzeugs im Raum verwendet werden kann.
In der elektronischen Luftfahrzeugausrüstung ein rotationssymmetrischer Körper,
der um seine Symmetrieachse rotiert.
Physikalisch als symmetrischer Kreisel bezeichnet.
Entsprechend dem Hauptsatz der Kreisellehre ist die erste Ableitung des Drehimpulsvektors nach der Zeit
gleich
dem einwikrenden äußeren Moment. Bei einem kräftefreien Kreisel
ist kein äußeres Moment vorhanden, daher bleibt der in der Drehachse liegende Drehimpuls nach
Betrag und Richtung konstant. Diese Eigenschaft wird im künstlichen Horizont und
im Kurskreisel ausgenutzt, bei denen der Kreisel wegen seiner
vollkandarischen Aufhängung stets seine Lage behält
und das Luftfahrzeug sich um den durch Träheitskräfte
festgehaltenen Kreisel dreht.
An luftfahrzeugfesten Marken lassen sich die interessierenden Winkel (Quer- und Längsneigung, Kurs) ablesen. Bei dem im Flugregler und Wendezeiger angewandten Wendekreisel (in Dämpfungslreglern als Dämpfungskreisel bezeichnet), bewirkt eine Drehung des Luftfahrzeuges um eine seiner Achsen ein äußeres Moment auf den Kreisel, da dieser hier nur 2 Freiheitsgrade hat und in einer senkrecht zur Drehachse liegenden Ebene festgehalten wird. Infolge des Momentes kommt es zu einem Verändern des Drehimpulsvektors nach Betrag und Richtung, so daß der Kreisel unter Einwirkung des Präzessionsmomentes eine Präzessionsbewegung ausführt, die eien Präzassionswinkel zur Folge hat und auf einer Skala angezeigt oder elektronisch zur weiteren Verarbeitung übertragen wird.
Wendekreisel werden auch als gefesselte Kreisel bezeichnet. Bei Horizont- und Kurskreisel ist häufig eine Einrichtung vorhanden, die den Kreisel selbsttätig in die Sollage einstellt, so daß die durch Lagereibung und Unwucht hervorgerufenen Fehler klein gehalten werden. Diese Einrichtung wird als Stützung bezeichnet (Kreiselstützung, Kreiselrückführung). Die Momentengeber der Stützung bezeichnet man als Stützmotore.
In Wendekreiseln werden die abgegebenen Signale der Bewegungsgröße
(Winkelgeschwindigkeit) entweder
proportional oder ihrem Integral oder dem
Differenzial nach der Zeit
entsprechend abgenommen.
Nach der Signalabgabe teilt man die Wendekreisel entsprechend den in der
Regelungstechnik üblichen Bezeichnungen als Prportional-, Integral- oder
Differenzialkreisel oder
nach Kombinationen ein.
Die am häufigsten benutzten Kreisel sind Asynchronmotoren, deren Kurzschlußanker den Kreiselkörper bildet. Dieser ist so geformt, daß ein großes Trägheitsmoment um seine Symmetrieachse entsteht. Der Motor wird mit Spannung eiener Frequenz von 400 Hz betrieben. Damit ergeben sich Drehzahlen von etwa 23 000 U/min.
Moderne Kreisel mit sehr hoher Genauigkeit sind kryogenische, elektrostatisch aufgehängteund Gaskreisel. Diese Bezeichnungen geben die Art der
Lagerung für die Kreisel an.
Der kryogenische Kreisel ist eine Hohlkugel, die im Vakuum durch einen supraleitenden Motor (Kühlung durch
flüssiges Helium) angetrieben wird.
Der elektrostatisch aufgehängte Kreisel besteht aus einer Hohlkugel, die im Vakuum zwischen elektrischen Feldern frei schwebt.
Der Antrieb erfolgt durch ein Drehfeld.
Gaskreisel haben keine mechanischen Lager, sondern liegen auf einem Gasstrahl.
Als optischen Kreisel oder Ringlaser bezeichnet man ein optisches Gerät, das die Frequenzdifferenz zwischen 2 gleichzeitig von einem Laser abgestrahlten Lichtwellen in einer ringförmigen Anordnung mißt. Die Frequenzdifferenz ist von der Drehgeschwindigkeit abhängig.
Physikalische Grundlagen
Kreiselmoment
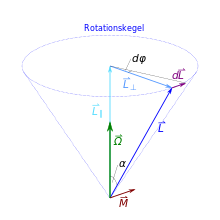
Wenn die Winkelgeschwindigkeit
des Kreisel ω deutlich größer als die Kippwinkelgeschwindigkeit Ω
ist, dann gilt die im Weiteren folgende Näherungsrechnung. Die
Drehimpulsänderung  ergibt sich aus der Winkeländerung dφ und der Ausrichtung der Kippachse
ergibt sich aus der Winkeländerung dφ und der Ausrichtung der Kippachse
 nach der folgenden Formel. Das Kreuzprodukt
bedeutet, hier interessiert nur die Komponente des Drehimpulses, die senkrecht
zur Kippachse
steht. Der Anteil parallel zur Kippachse sei vernachlässigt.
nach der folgenden Formel. Das Kreuzprodukt
bedeutet, hier interessiert nur die Komponente des Drehimpulses, die senkrecht
zur Kippachse
steht. Der Anteil parallel zur Kippachse sei vernachlässigt.


Die Winkeländerung dφ über die Zeit dt stellt des Weiteren die Kippwinkelgeschwindigkeit Ω dar. Im nächsten Schritt sei die Drehimpulsänderung eingesetzt in den Eulerschen Drehimpulssatz. Damit folgt das resultierende Drehmoment M aus den Kreiselparametern Rotationsrate ω und Trägheitsmoment der Figurenachse I, verbunden mit der Kippwinkelgeschwindigkeit Ω.



Funktionsprinzip
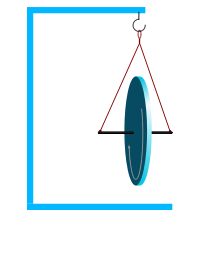
Der Kreiselkompass besteht aus einem schnell rotierenden Kreisel, gewöhnlich in einer Kardanischen Aufhängung. Zusätzlich ist er so angeordnet, dass ein Drehmoment auf ihn einwirkt, solange seine Drehrichtung nicht nach Norden weist. Weist die Drehrichtung nach Norden und somit die Drehachse in Rotationsrichtung der Erde, wird das Drehmoment (das Kreuzprodukt aus dem Radius senkrecht zur Drehrichtung und der Kraft durch die Beschleunigung in Richtung der Erddrehung) null. Im nebenan dargestellten Versuchsaufbau ist er als Pendel aufgehängt. Nur parallel zur Erdoberfläche kann er sich frei ausrichten.
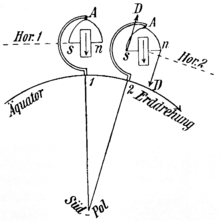
Die Schemazeichnung in Abb. 2 zeigt, vom Südpol aus betrachtet, einen Kreiselkompass, der sich entlang des Äquators bewegt. Zunächst steht seine Rotationsachse s-n parallel zur Erdoberfläche. Gemäß der Drehimpulserhaltung behält die Achse ihre Richtung auch bei Bewegung zur zweiten eingezeichneten Position bei. Aufgrund der besonderen Aufhängung kann sich der Kreisel nur in zwei Ebenen kräftefrei ausrichten. Auf die dritte Richtung wirkt die Erdanziehung. Sie versucht, die Achse entlang der mit D bezeichneten Pfeile zu kippen. Das von ihr erzeugte Drehmoment kippt die Rotationsachse aus der Zeichenebene heraus und lässt den Kreisel präzedieren. Durch Dämpfung der Drehbewegung um den Punkt A kommt der Kreisel zur Ruhe, wenn die angreifende Kraft verschwindet. Das ist dann der Fall, wenn die Kreiselachse in die Nord-Süd-Richtung zeigt („meridiansuchender Kreisel“).
Bewegungen des Kreisels entlang eines Meridians verursachen Missweisungen. Dann zeigt der Kreisel nicht mehr genau nach Norden, sondern in die Richtung, die sich aus der Summe der von der geographischen Breite (cos φ) abhängigen Geschwindigkeit an der Erdoberfläche und der, mit welcher der Kreisel bewegt wird, ergibt. Eine Geschwindigkeit entlang des Meridians von 20 km/h verursacht die in der Navigation als Fahrtfehler bezeichnete Ablenkung von lediglich 0,5°. Bei 150 km/h steigt er auf 5°. Bewegt sich der Kreisel mit der Rotationsgeschwindigkeit der Erde am Äquator von 1600 km/h entlang eines Meridians, beträgt sie 45°.
In der Nähe der Pole versagt der Kreiselkompass, weil die Drehachse der Erde fast senkrecht aus der Oberfläche hinaus zeigt und das auf die Horizontalebene projizierte Drehmoment sehr klein wird. Diese Probleme führten zur Entwicklung von Drei-Kreisel-Kompassen.
Ein Kreiselkompass ist empfindlich gegenüber Beschleunigungen (z. B. wenn ein Schiff Fahrt aufnimmt oder seinen Kurs ändert). Die dadurch entstehenden Anzeigefehler können durch die sogenannte Schuler-Abstimmung weitgehend beseitigt werden (Näheres siehe Schuler-Periode). Die Untersuchungen dazu gehen auf Maximilian Schuler zurück. Für sich schnell ändernde Beschleunigungen, wie sie beim Stampfen oder Schlingern eines Schiffes auftreten, sind andere Abstimmungen sinnvoll.
Ein moderner Kreiselkompass erreicht eine dynamische Ausrichtgenauigkeit von weniger als 0,5°, besser als ein optischer Faserkreisel.
Deviationsmoment
Das Deviationsmoment ist ein Maß für das Bestreben eines Kreisels seine Rotationsachse zu verändern, wenn er nicht um eine seiner Hauptträgheitsachsen rotiert.
Eulersche Kreiselgleichungen
Eine Verallgemeinerung der Kreiselbewegung ergibt sich aus dem
Drehimpulssatz. Dabei folgt der Drehimpuls
 aus dem Produkt von Trägheitstensor
aus dem Produkt von Trägheitstensor
 und Drehgeschwindigkeit
und Drehgeschwindigkeit  des Kreisels. Wie die Masse für die translatorische Bewegung angibt, wie
„schwer“ ein Körper zu beschleunigen ist, so beschreibt der Trägheitstensor für
die Drehbewegung, wie „schwer“ es ist, die Drehung eines Kreisels zu ändern. Im
Trägheitstensor sind die Trägheitsmomente
für Drehungen um die verschiedenen Drehachsen des Kreisels zusammengefasst.
Berechnet man die Änderung des Drehimpulses durch dessen Ableitung nach der
Zeit, ergibt sich:
des Kreisels. Wie die Masse für die translatorische Bewegung angibt, wie
„schwer“ ein Körper zu beschleunigen ist, so beschreibt der Trägheitstensor für
die Drehbewegung, wie „schwer“ es ist, die Drehung eines Kreisels zu ändern. Im
Trägheitstensor sind die Trägheitsmomente
für Drehungen um die verschiedenen Drehachsen des Kreisels zusammengefasst.
Berechnet man die Änderung des Drehimpulses durch dessen Ableitung nach der
Zeit, ergibt sich:

Das heißt, die Änderung des Drehimpulses  setzt ein Drehmoment
setzt ein Drehmoment  voraus. Sie ist abhängig von der Änderung der räumlichen Richtung des
Drehimpulses (Term
voraus. Sie ist abhängig von der Änderung der räumlichen Richtung des
Drehimpulses (Term  )
sowie von der Änderung der momentanen Winkelgeschwindigkeit
)
sowie von der Änderung der momentanen Winkelgeschwindigkeit  (Term
(Term  ).
).
Durch die Rotation in ein Bezugssystem, in dem der Trägheitstensor eine Diagonalmatrix bildet, können die einzelnen Komponenten der Vektoren in ein besonders einfaches System von Differentialgleichungen umformuliert werden. Sie sind nach ihrem Entdecker Leonhard Euler als die Eulerschen Kreiselgleichungen bekannt.
siehe auch

© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 08.12. 2021