Autonome Differentialgleichung
Als autonome Differentialgleichung oder autonomes System bezeichnet man einen Typ von gewöhnlichen Differentialgleichungen, der nicht explizit von der unabhängigen Variable abhängt.
Zum Beispiel ist die Differentialgleichung für den harmonischen Oszillator

autonom, die Mathieusche Differentialgleichung
![{\displaystyle \ y''(x)+[\lambda +\gamma \cos(x)]\cdot y(x)=0.}](/svg/a7ed35534f1f2ad11f6a455b49f8ffabc801e455.svg)
dagegen nicht, da sie explizit von der unabhängigen Variable  abhängt (ein Parameter wird „von außen“ periodisch verändert). Die unabhängige
Variable steht in den Anwendungen häufig für die Zeit.
abhängt (ein Parameter wird „von außen“ periodisch verändert). Die unabhängige
Variable steht in den Anwendungen häufig für die Zeit.
Definition
Eine gewöhnliche Differentialgleichung

heißt autonome Differentialgleichung, wenn die Funktion  nicht explizit von der unabhängigen Variable
abhängt, das heißt wenn
nicht explizit von der unabhängigen Variable
abhängt, das heißt wenn

für alle
im Definitionsbereich gilt.
Nach Übergang zu einem höherdimensionalen System erster Ordnung kann man, für
einen n-dimensionalen Phasenraum
 ,
die Funktion
von
nach
,
die Funktion
von
nach  auch als Vektorfeld betrachten. Das
heißt man führt neue Variable ein:
auch als Vektorfeld betrachten. Das
heißt man führt neue Variable ein:
 mit
mit 
mit:
 (der gesuchten Funktion)
(der gesuchten Funktion)




Dadurch erhält man ein System von  gekoppelten Differentialgleichungen in
Variablen.
gekoppelten Differentialgleichungen in
Variablen.
Die Kurvenintegrale
(also die Lösungen) der autonomen Differentialgleichungen sind
translationsinvariant.
Ist  eine Lösung einer autonomen Differentialgleichung, so ist auch
eine Lösung einer autonomen Differentialgleichung, so ist auch  für alle
für alle  eine Lösung ebendieser Gleichung bei geeignet verschobener Anfangsbedingung.
eine Lösung ebendieser Gleichung bei geeignet verschobener Anfangsbedingung.
In vielen Anwendungen ist die unabhängige Variable die Zeit  .
.
Ein nicht-autonomes System in n Variablen  ,
in dem
noch explizit von der unabhängigen Variablen
abhängt, kann man durch Hinzufügung einer weiteren Variablen
,
in dem
noch explizit von der unabhängigen Variablen
abhängt, kann man durch Hinzufügung einer weiteren Variablen  formal autonom machen:
formal autonom machen:

womit man erhält

Lösungsmethoden
Die Gleichung erster Ordnung (die unabhängige Variable ist im Folgenden )

kann durch Trennung der Variablen gelöst werden, formal:


mit einer Konstanten  .
Bei Gleichungen zweiter Ordnung kann man häufig wie oben nach Einführung neuer
Variabler ebenfalls durch Trennung der Variablen lösen. Sei
.
Bei Gleichungen zweiter Ordnung kann man häufig wie oben nach Einführung neuer
Variabler ebenfalls durch Trennung der Variablen lösen. Sei

mit der neuen Variablen
 (Gleichung 1)
(Gleichung 1)
und

erhält man:
 (Gleichung 2)
(Gleichung 2)
Das ist ein gekoppeltes System von zwei Gleichungen (Gleichung 1,2). Wendet man in der Gleichung 1 Trennung der Variablen an erhält man:

Für  muss man die Gleichung 2 lösen. Ist
muss man die Gleichung 2 lösen. Ist

kann man dort ebenfalls Trennung der Variablen ausführen und erhält:

und insgesamt:

Ebenfalls mit Trennung der Variablen kann man den Fall:

behandeln, wie man durch Einsetzen in die Gleichung 2 sieht.
Beispiele
Autonome Systeme kommen häufig in der Theorie Dynamischer Systeme vor. Ein Beispiel für eine autonome Differentialgleichung ist die in der theoretischen Biologie verwendete logistische Differentialgleichung und der Lorenz-Attraktor in der Chaostheorie. Beide sind nichtlinear. In der Hamiltonschen Mechanik (mit klassischem Phasenraum aus Orts- und Impulsvariablen) hat man es mit solchen Systemen zu tun falls die Hamiltonfunktion nicht explizit zeitabhängig ist.
Qualitative Theorie der Fixpunkte der Differentialgleichung
Als Fixpunkt (Gleichgewichtspunkt) der Differentialgleichung, betrachtet als
Vektorfeld (Fluss) im Phasenraum (die Tangenten der Trajektorien (Bahnen) sind
 )
bezeichnet man eine Stelle
)
bezeichnet man eine Stelle  ,
an der die autonome gewöhnliche Differentialgleichung (unabhängige Variable sei
die Zeit t, Ableitung mit unterem Index) eine Nullstelle hat:[1]
,
an der die autonome gewöhnliche Differentialgleichung (unabhängige Variable sei
die Zeit t, Ableitung mit unterem Index) eine Nullstelle hat:[1]

An diesem Punkt ist das dynamische System stationär (zeitunabhängig). Ein
Fixpunkt ist stabil, falls Trajektorien aus einer Umgebung des Fixpunkts in der
Umgebung bleiben, und asymptotisch stabil, falls Trajektorien aus einer Umgebung
(die maximale Erweiterung ist das Einzugsgebiet (Basin of attraction) des
Fixpunkts) für  gegen den Fixpunkt konvergieren (ein Fall, der häufig bei Problemen mit Dämpfung
auftritt). Das ist ein Beispiel eines Attraktors (es gibt auch kompliziertere
Attraktoren zum Beispiel mit Grenzzyklus,
hier werden nur solche vom Typ isolierter Punkte betrachtet).
gegen den Fixpunkt konvergieren (ein Fall, der häufig bei Problemen mit Dämpfung
auftritt). Das ist ein Beispiel eines Attraktors (es gibt auch kompliziertere
Attraktoren zum Beispiel mit Grenzzyklus,
hier werden nur solche vom Typ isolierter Punkte betrachtet).
Man linearisiere  um den Fixpunkt
um den Fixpunkt
 :
:
mit Termen höherer Ordnung in  ,
die vernachlässigt werden, und einer Matrix
,
die vernachlässigt werden, und einer Matrix  ,
der Jacobi-Matrix:
,
der Jacobi-Matrix:
 (ausgewertet an der Stelle
(ausgewertet an der Stelle  )
)
so dass der Fall einer konstanten, als nicht-singulär angenommenen Matrix
vorliegt. Der Einfachheit wird hier nur der ebene Fall behandelt  .
Dann hat die Matrix ,
da sie reell ist, die beiden komplex konjugierten Eigenwerte
.
Dann hat die Matrix ,
da sie reell ist, die beiden komplex konjugierten Eigenwerte  ,
die aus der charakteristischen Gleichung bestimmt werden:
,
die aus der charakteristischen Gleichung bestimmt werden:


ausgedrückt durch die Determinante  und Spur
und Spur  der Matrix A. Die Lösung der linearisierten Gleichung ist:
der Matrix A. Die Lösung der linearisierten Gleichung ist:

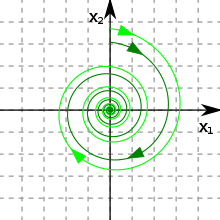
- Der Fall asymptotischer Stabilität (Abbildung rechts) liegt dann für
 vor (beide Eigenwerte negativer Realteil). Das entspricht genau dem Fall dass
vor (beide Eigenwerte negativer Realteil). Das entspricht genau dem Fall dass
 und
und  Im Phasenbild liegt eine Senke (stabiler Knoten) vor. In der Abbildung
hat sie Spiralform (das heisst die Eigenwerte sind nicht reell sondern haben
nicht verschwindenden Imaginärteil), was auch Fokus genannt wird,
sind sie reell liegt ein Knoten vor.
Im Phasenbild liegt eine Senke (stabiler Knoten) vor. In der Abbildung
hat sie Spiralform (das heisst die Eigenwerte sind nicht reell sondern haben
nicht verschwindenden Imaginärteil), was auch Fokus genannt wird,
sind sie reell liegt ein Knoten vor.
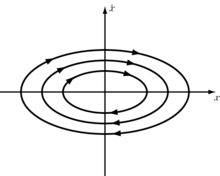
- Für
 (also rein imaginäre Eigenwerte) hat man den Fall neutraler Stabilität, zum
Beispiel die periodische Bewegung eines Pendels (das Phasenbild hat eine
Zentrums-Mannigfaltigkeit, elliptischer Fixpunkt). Das entspricht das
(also rein imaginäre Eigenwerte) hat man den Fall neutraler Stabilität, zum
Beispiel die periodische Bewegung eines Pendels (das Phasenbild hat eine
Zentrums-Mannigfaltigkeit, elliptischer Fixpunkt). Das entspricht das  .
.
- Falls nur für einen der Eigenwerte
 ist sind alle Eigenwerte reell und der zweite Eigenwert
ist sind alle Eigenwerte reell und der zweite Eigenwert  ist positiv. Das entspricht dem Fall
ist positiv. Das entspricht dem Fall  .
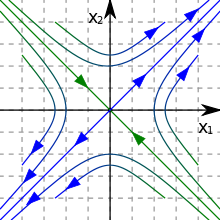
Hier hat man einen Sattelpunkt.
Der Phasenraum der Differentialgleichung wird beim Sattelpunkt durch zwei sich
kreuzende Geraden (Separatrix) in vier Bereiche aufgeteilt, in denen die
Trajektorien jeweils bleiben. Auf der einen Geraden verläuft die Bahn für
zum Fixpunkt (stabile Untermannigfaltigkeit), auf der anderen vom Fixpunkt
fort (Instabile Untermannigfaltigkeit), das heisst für
.
Hier hat man einen Sattelpunkt.
Der Phasenraum der Differentialgleichung wird beim Sattelpunkt durch zwei sich
kreuzende Geraden (Separatrix) in vier Bereiche aufgeteilt, in denen die
Trajektorien jeweils bleiben. Auf der einen Geraden verläuft die Bahn für
zum Fixpunkt (stabile Untermannigfaltigkeit), auf der anderen vom Fixpunkt
fort (Instabile Untermannigfaltigkeit), das heisst für  zum Fixpunkt. Da sie den Fixpunkten nur für unendliche Zeiten erreichen,
schneiden sich die zu den Geraden gehörigen Trajektorien nicht.
zum Fixpunkt. Da sie den Fixpunkten nur für unendliche Zeiten erreichen,
schneiden sich die zu den Geraden gehörigen Trajektorien nicht.
- Für
 hat man keinen stabilen Fixpunkt: die Trajektorien streben vom Punkt weg. Hier
liegt eine instabiler Knoten (Quelle) vor bzw. bei
nicht-verschwindendem Imaginärteil der Eigenwerte ein instabiler Fokus. Das
entspricht dem Fall
und
hat man keinen stabilen Fixpunkt: die Trajektorien streben vom Punkt weg. Hier
liegt eine instabiler Knoten (Quelle) vor bzw. bei
nicht-verschwindendem Imaginärteil der Eigenwerte ein instabiler Fokus. Das
entspricht dem Fall
und  .
.
Die Diskussion für den linearisierten Fall gilt lokal. Für sogenannte Hyperbolische Fixpunkte[2], für die die Realteile der Eigenwerte des linearisierten Systems ungleich Null sind (worunter Quellen, Senken, Sattelpunkte und Foki (Spiralen) fallen), lässt sich aus dem linearisierten Verhalten auf das Verhalten des nichtlinearen Systems nahe dem Fixpunkt schließen (Satz von Hartman-Grobman).
Man unterscheidet zwischen konservativen Systemen, in denen

gilt (zum Beispiel Hamiltonsche Systeme ohne Zeitabhängigkeit der
Hamiltonfunktion
nach dem Satz
von Liouville) und solchen, in denen dies nicht gilt (dissipative Systeme).
Bei konservativen Systemen, in denen das Phasenraumvolumen erhalten ist, gibt es
als Fixpunkte nur elliptische Fixpunkte (Zentren) und Sattelpunkte (nicht
Quellen, Senken oder Spiralen), und Grenzzyklen sind auch nicht erlaubt.
Grenzzyklen sind als mögliche Grenzmengen des Phasenraumflusses zuerst von Henri
Poincaré betrachtet worden (der für zwei Dimensionen geltende Satz von
Poincaré-Bendixson macht hier Existenzaussagen). Grenzzyklen können bei
Variation der Parameter des Systems durch Hopf-Bifurkation
aus Fixpunkten entstehen (das entspricht dem Fall, dass  und
und  ).
Bei einer Sattel-Knoten-Bifurkation
kollidieren zwei Fixpunkte. Das entspricht dem Übergang von
nach
(von Knoten zu Sattelpunkten und umgekehrt).
).
Bei einer Sattel-Knoten-Bifurkation
kollidieren zwei Fixpunkte. Das entspricht dem Übergang von
nach
(von Knoten zu Sattelpunkten und umgekehrt).
In drei Dimensionen hat man drei Eigenwerte und je nachdem deren Real- und Imaginärteil verschwindet, positiv oder negativ ist mehr Möglichkeiten: zum Beispiel neben Sattel und Knoten wie oben stabile und instabile Fokus-Knoten und Sattel-Foki. Es gibt auch neue Arten nicht-hyperbolischer Fixpunkte, die bei Zuschalten der nichtlinearen Terme nicht strukturell stabil sind. Deren Verhalten hängt vielmehr von den nichtlinearen Termen ab und es entstehen neue Typen nicht-hyperbolischer Fixpunkte etwa bei Hopf-Bifurkationen oder Sattel-Knoten-Bifurkationen. Zum Beispiel tritt die Bogdanov-Takens-Bifurkation in nichtlinearen Systemen auf, in denen zwei der Eigenwerte verschwinden (sie besteht aus einer Kombination von Sattel-Knoten-Bifurkation und Hopf-Bifurkation).
Galerie
-
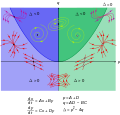 Qualitatives Verhalten nahe der Fixpunkte in zwei Dimensionen in Abhängigkeit von Spur p und Determinante q
Qualitatives Verhalten nahe der Fixpunkte in zwei Dimensionen in Abhängigkeit von Spur p und Determinante q -
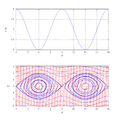
 Phasendiagramme des Pendels mit durchgehender blauer Separatrix mit Sattelpunkten in den scheinbaren Schnittpunkten. Die Separatrix umhüllt die geschlossenen Kurven (periodische Bewegung mit Zentrum)
Phasendiagramme des Pendels mit durchgehender blauer Separatrix mit Sattelpunkten in den scheinbaren Schnittpunkten. Die Separatrix umhüllt die geschlossenen Kurven (periodische Bewegung mit Zentrum)
Literatur
- Günther Wirsching: Gewöhnliche Differentialgleichungen, Teubner 2006
- Hirsch, Smale, Devaney: Differential Equations, Dynamical Systems and Introduction to Chaos, Academic Press 2004
Einzelnachweise
- ↑ Darstellung im Folgenden nach Beltrami, Mathematics for Dynamics Modeling, Academic Press 1987. Auch dargestellt in Hirsch, Smale, Differential Equations, Dynamical Systems and Linear Algebra, Academic Press 1974 und der Neuauflage Hirsch, Smale, Devaney, Differential Equations, Dynamical Systems and Introduction to Chaos, Academic Press 2004, dort Klassifikation ebener Systeme nach Determinante und Spur der Matrix zusammengefasst in der Abbildung S. 63
- ↑ Manchmal wird auch im engeren Sinn ein Sattelpunkt als hyperbolischer Fixpunkt, der Fall eines Zentrums als elliptisch bezeichnet.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 28.06. 2025