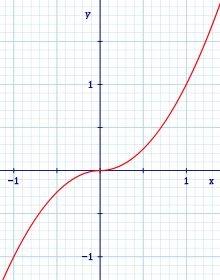
Sattelpunkt
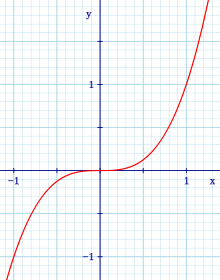
 in (0,0)
in (0,0)In der Mathematik bezeichnet man als Sattelpunkt, Terrassenpunkt oder Horizontalwendepunkt einen kritischen Punkt einer Funktion, der kein Extrempunkt ist. Punkte dieser Art sind, wie die zuletzt genannte Bezeichnung es andeutet, Spezialfälle von Wendepunkten. Sattelpunkte spielen beispielsweise eine große Rolle bei der Optimierung unter Nebenbedingungen bei Verwendung der Lagrange-Dualität.
Eindimensionaler Fall
 in (0,0)
in (0,0)Für Funktionen einer Veränderlichen  mit
mit  ist das Verschwinden der ersten Ableitung an der Stelle
ist das Verschwinden der ersten Ableitung an der Stelle 

eine Bedingung dafür, dass ein kritischer Punkt vorliegt. Ist die 2.
Ableitung an dieser Stelle nicht gleich 0, so liegt ein Extrempunkt und
damit kein Sattelpunkt vor. Für einen Sattelpunkt muss die 2. Ableitung 0
sein, wenn sie existiert. Dies ist allerdings nur eine notwendige Bedingung (für
zweimal stetig differenzierbare Funktionen), wie man an der Funktion  sieht.
sieht.
Umgekehrt gilt (hinreichende Bedingung): Sind die ersten beiden Ableitungen gleich 0 und die 3. Ableitung ungleich 0, so liegt ein Sattelpunkt vor; es handelt sich also um einen Wendepunkt mit waagrechter Tangente.
Dieses Kriterium lässt sich verallgemeinern: Gilt für ein 

sind also die ersten  Ableitungen gleich 0 und die
Ableitungen gleich 0 und die  -te
Ableitung ungleich 0, so hat der Graph von
-te
Ableitung ungleich 0, so hat der Graph von  bei
einen Sattelpunkt.
bei
einen Sattelpunkt.
Die genannte Bedingung ist allerdings nicht notwendig. Auch wenn ein
Sattelpunkt an der Stelle
vorhanden ist, können alle Ableitungen  gleich 0 sein.
gleich 0 sein.
Man kann einen Terrassenpunkt im eindimensionalen Fall als einen Wendepunkt mit Tangente parallel zur x-Achse interpretieren.
Beispiel für eine ganzrationale Funktion (Polynomfunktion) mit zwei Sattelpunkten
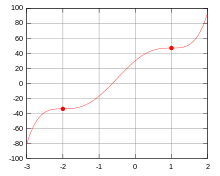
Bereits ganzrationale Funktionen 5. Grades können zwei Sattelpunkte haben, wie folgendes Beispiel zeigt:

Denn die 1. Ableitung hat zwei doppelte Nullstellen −2 und 1:

Für die 2. Ableitung

sind −2 und 1 ebenfalls Nullstellen, jedoch ist die 3. Ableitung

dort ungleich Null:

Deshalb sind  und
und  Sattelpunkte der Funktion .
Sattelpunkte der Funktion .
Mehrdimensionaler Fall

Spezifikation über Ableitungen
Für Funktionen mehrerer Veränderlicher (Skalarfelder)
 mit
mit  ist das Verschwinden des Gradienten
an der Stelle
ist das Verschwinden des Gradienten
an der Stelle

eine Bedingung dafür, dass ein kritischer Punkt vorliegt. Die Bedingung
bedeutet, dass an der Stelle  alle partiellen Ableitungen null sind. Ist zusätzlich die Hesse-Matrix indefinit, so liegt ein
Sattelpunkt vor.
alle partiellen Ableitungen null sind. Ist zusätzlich die Hesse-Matrix indefinit, so liegt ein
Sattelpunkt vor.
Spezifikation direkt über die Funktion
Im generischen Fall – das bedeutet, dass die zweite Ableitung in keiner
Richtung verschwindet oder, äquivalent, die Hessesche Matrix invertierbar
ist – hat die Umgebung eines Sattelpunktes eine besondere Gestalt. Für den
Fall, dass ein solcher Sattelpunkt mit den Koordinatenachsen
ausgerichtet ist, lässt sich ein Sattelpunkt auch ganz ohne Ableitungen in
einfacher Weise beschreiben: Ein Punkt  ist ein Sattelpunkt der Funktion
ist ein Sattelpunkt der Funktion  ,
falls eine offene Umgebung
,
falls eine offene Umgebung  von
von  existiert, sodass
existiert, sodass
 bzw.
bzw. 
für alle  erfüllt ist. Anschaulich bedeutet dies, dass der Funktionswert von
in
erfüllt ist. Anschaulich bedeutet dies, dass der Funktionswert von
in  -Richtung
kleiner wird, sobald der Sattelpunkt verlassen wird, während ein Verlassen des
Sattelpunktes in
-Richtung
kleiner wird, sobald der Sattelpunkt verlassen wird, während ein Verlassen des
Sattelpunktes in  -Richtung
ein Ansteigen der Funktion
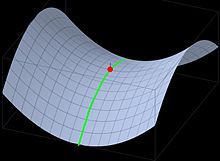
zur Folge hat (bzw. umgekehrt). Diese Beschreibung eines Sattelpunktes ist
Ursprung der Namensgebung: Ein Reitsattel
neigt sich senkrecht zur Wirbelsäule des Pferdes
nach unten, stellt also die -Richtung
dar, während er in -Richtung,
d.h. parallel zur Wirbelsäule, nach oben ausgeformt ist. Nach dem
Reitsattel ist auch der Bergsattel
benannt, dessen Gestalt ebenfalls der Umgebung eines Sattelpunkts entspricht.
-Richtung
ein Ansteigen der Funktion
zur Folge hat (bzw. umgekehrt). Diese Beschreibung eines Sattelpunktes ist
Ursprung der Namensgebung: Ein Reitsattel
neigt sich senkrecht zur Wirbelsäule des Pferdes
nach unten, stellt also die -Richtung
dar, während er in -Richtung,
d.h. parallel zur Wirbelsäule, nach oben ausgeformt ist. Nach dem
Reitsattel ist auch der Bergsattel
benannt, dessen Gestalt ebenfalls der Umgebung eines Sattelpunkts entspricht.
Falls der Sattelpunkt nicht in Koordinatenrichtung ausgerichtet ist, stellt sich die obige Beziehung nach einer Koordinatentransformation ein.
Sattelpunkte dieses Typs existieren in Dimension 1 nicht: Falls hier die
zweite Ableitung nicht verschwindet, liegt automatisch ein lokales Maximum oder
ein lokales Minimum vor. Den Beispielen aus Dimension 1 entsprechen degenerierte
kritische Punkte, wie zum Beispiel der Nullpunkt für die Funktion  oder für
oder für  :
In beiden Fällen existiert eine Richtung, in der die zweite Ableitung
verschwindet, und entsprechend ist die Hessesche Matrix nicht invertierbar.
:
In beiden Fällen existiert eine Richtung, in der die zweite Ableitung
verschwindet, und entsprechend ist die Hessesche Matrix nicht invertierbar.
Beispiele
Die Funktion

hat den Sattelpunkt  :
Ist
:
Ist  ,
so ist
,
so ist  für alle
für alle  .
Für
.
Für  ergibt sich
ergibt sich
 .
.
Dass
ein Sattelpunkt von
ist, lässt sich auch über das Ableitungskriterium beweisen. Es ist
![\nabla F(x,y) = \left[-2x\left(1+\frac{1}{4}(y-1)^2\right),(1-x^2)\frac{y-1}{2}\right],](/svg/c17b625a6d7176b416de0b04afd096a1a9e145b1.svg)
und nach Einsetzen von  ergibt sich
ergibt sich  .
Die Hesse-Matrix zu
ist
.
Die Hesse-Matrix zu
ist
 ,
,
und nach Einsetzen des Sattelpunktes :

Da ein Eigenwert
von  positiv ist
positiv ist  und einer negativ
und einer negativ  ,
ist die Hesse-Matrix indefinit, was nachweist, dass tatsächlich ein Sattelpunkt
vorliegt.
,
ist die Hesse-Matrix indefinit, was nachweist, dass tatsächlich ein Sattelpunkt
vorliegt.
Sonstige Verwendung
Für die Definition im Fall von Systemen gewöhnlicher Differentialgleichungen siehe Autonome Differentialgleichung.
Siehe auc


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 16.12. 2021