Z-Transformation
Die z-Transformation ist eine mathematische Methode, um zyklisch abgetastete kontinuierliche Signale im Zusammenhang mit dynamischen Systemen im z-Bereich berechenbar zu machen .
Die z-Transformation ist aus der Laplace-Transformation
entstanden und hat auch ähnliche Eigenschaften und Berechnungsregeln. Sie
erlaubt für die digitale
Signalverarbeitung mit Computern
(Mikrocomputern) die
Berechnung von impulsförmig abgetasteten und digitalisierten
Signalfolgen (Wertefolgen) in Verbindung mit kontinuierlichen dynamischen
Systemen  oder den zugehörigen systembeschreibenden linearen Differenzengleichungen
oder den zugehörigen systembeschreibenden linearen Differenzengleichungen
 .
.
Ein Vorteil der Anwendung der z-Transformation ergibt sich, wenn eine
Wertefolge und eine systembeschreibende Differenzengleichung in eine algebraisch
zusammengefasste z-Übertragungsfunktion
überführt wird. Die Übertragungsfunktion des z-Bereiches  dient der Systemanalyse
und dem Systemverhalten. Der Verlauf der Systemausgangsgröße
kann bei gegebener Eingangsgröße
dient der Systemanalyse
und dem Systemverhalten. Der Verlauf der Systemausgangsgröße
kann bei gegebener Eingangsgröße  durch verschiedene Methoden der inversen z-Transformation in den zeitdiskreten
Bereich
durch verschiedene Methoden der inversen z-Transformation in den zeitdiskreten
Bereich  und dann im Zeitbereich
und dann im Zeitbereich  dargestellt werden.
dargestellt werden.
Die Anwendung der z-Transformation bezieht sich ausschließlich auf Digitalrechner-geführte Anlagen, die Steuer- und Regelungstechnik und digitale Filter.
Einführung in die z-Transformation
Geschichtliche Entwicklung
Die grundsätzlichen Ideen zur z-Transformation gehen auf Pierre-Simon Laplace zurück und wurde 1947 durch Witold Hurewicz zur Lösung von linearen Differentialgleichungen mit konstanten Koeffizienten verwendet.
Ursprünglich wurde sie als „Laplace-Transformation von Abtastfunktionen“ eingeführt, im Jahr 1952 erfolgte die heute übliche Begriffsfestlegung z-Transformation durch John R. Ragazzini und Lotfi A. Zadeh bei Arbeiten mit zeitdiskreten Daten im Rahmen der Regelungstechnik an der Columbia University.
Die Modifizierte z-Transformation geht auf Arbeiten von Eliahu Ibrahim Jury aus dem Jahr 1958 zurück.
Definition der Systemgrößen
Folgende Systemgrößen werden für die verschiedenen -,
 -,
-
und
-,
-
und  -Bereiche
verwendet:
-Bereiche
verwendet:
- Eingangssignal
 ,
Ausgangssignal
,
Ausgangssignal  .
.
- Werden in der Regelungstechnik Regler
und Regelstrecke
gleichzeitig betrachtet, wird die Eingangsgröße als
 (Regelabweichung)
bezeichnet, die Ausgangsgröße
ist gleichzeitig die Eingangsgröße der Regelstrecke. Die Ausgangsgröße der
Regelstrecke ist .
Im Zeitbereich werden diese Größen als Kleinbuchstaben, im Bildbereich als
Großbuchstaben geschrieben.
(Regelabweichung)
bezeichnet, die Ausgangsgröße
ist gleichzeitig die Eingangsgröße der Regelstrecke. Die Ausgangsgröße der
Regelstrecke ist .
Im Zeitbereich werden diese Größen als Kleinbuchstaben, im Bildbereich als
Großbuchstaben geschrieben.
- Zeitdiskrete Signale:
 vereinfacht als
oder .
vereinfacht als
oder . - Zeitkonstante: T, bei mehreren Zeitkonstanten des dynamischen Systems
werden die Zeitkonstanten indiziert:
 .
. - Diskrete Zeit:
 ist ein Parameter der Zeit (Zeitabschnitt), keine reale Zeit.
ist ein Parameter der Zeit (Zeitabschnitt), keine reale Zeit.
- Bei der rekursiven
Simulation mit
Differenzengleichungen 1. Ordnung eines dynamischen Systems mit dem
Digitalrechner erfolgt keine Abtastung. Jedes berechnete Glied von k der
endlichen Ausgangsfolge bezieht sich auf das um k-1 zurückliegende Glied. Auf
diese Weise entstehen Eingangsfolgen und Ausgangsfolgen aller benutzten
Differenzengleichungen von Teilsystemen für eine bestimmte Folge von k. Die
gleichen Differenzengleichungen werden bis
 wiederholt berechnet und gespeichert.
wiederholt berechnet und gespeichert.
- Abtastzeit:
 ist eine reale Zeit, üblich ist:
ist eine reale Zeit, üblich ist:  .
. - Abtastfolge:
 unendlichen oder
unendlichen oder  einer endlichen Folge.
einer endlichen Folge. - Wertefolge:
![u_{{(k)}}=[u(0),u(T_{A}),u(2T_{A}),u(3T_{A}),\dots ]](/svg/0d6ad2920e66ba89fe6b907e5363c5499922836a.svg)
- Die Abtastfolge
 bedeutet eine Nummerierung der Folgeglieder der Wertefolge des Eingangssignals
(Eingangsfolge) oder des Ausgangssignals (Ausgangsfolge) eines
Systems.
bedeutet eine Nummerierung der Folgeglieder der Wertefolge des Eingangssignals
(Eingangsfolge) oder des Ausgangssignals (Ausgangsfolge) eines
Systems.
- Funktion im Zeitbereich:
und ;
Funktion im Bildbereich:
und .
- Zählergrad:
 und Nennergrad:
und Nennergrad:  kennzeichnen die Rangfolge der Koeffizienten der s-Übertragungsfunktion und
der z-Übertragungsfunktion.
kennzeichnen die Rangfolge der Koeffizienten der s-Übertragungsfunktion und
der z-Übertragungsfunktion. - e = Eulersche Zahl ≈ 2,71828.
Grundlagen z-Transformation
Die Laplace-Transformation ist ein mathematisches Verfahren der Systemtheorie zur Behandlung und Berechnung von kontinuierlichen Signalen und linearen zeitinvarianten dynamischen Systemen.
Die z-Transformation ist ein mathematisches Verfahren der Systemtheorie zur Behandlung und Berechnung von kontinuierlich abgetasteten Signalen und linearen zeitinvarianten zeitdiskreten dynamischen Systemen. Ein zeitdiskretes dynamisches System wird durch Differenzengleichungen oder als z-Transformierte beschrieben.
Zeitinvariante lineare
dynamische Systeme  haben mindestens einen Systemeingang und einen Systemausgang für das
Eingangssignal
und Ausgangssignal .
Das Systemverhalten
wird im Zeitbereich durch gewöhnliche
Differentialgleichungen beschrieben. Mit der Laplace-Transformation kann
eine gewöhnliche Differentialgleichung in den sogenannten Bildbereich
(s-Bereich, komplexer
Frequenzbereich) überführt werden. Das Systemverhalten im Bildbereich wird durch
die s-Übertragungsfunktion
bestimmt und kann algebraisch behandelt werden.
haben mindestens einen Systemeingang und einen Systemausgang für das
Eingangssignal
und Ausgangssignal .
Das Systemverhalten
wird im Zeitbereich durch gewöhnliche
Differentialgleichungen beschrieben. Mit der Laplace-Transformation kann
eine gewöhnliche Differentialgleichung in den sogenannten Bildbereich
(s-Bereich, komplexer
Frequenzbereich) überführt werden. Das Systemverhalten im Bildbereich wird durch
die s-Übertragungsfunktion
bestimmt und kann algebraisch behandelt werden.
Diskrete
Zeit: Die Zeitdiskretisierung eines kontinuierlichen Signals oder eines
dynamischen zeitinvarianten Übertragungssystems bedeutet der Übergang der
Berechnung eines kontinuierlichen Signals oder Systems
mit unendlicher hoher Auflösung zu einem Signal oder Systems  mit einer endlichen Auflösung eines fortlaufenden konstanten Zeitintervalls
mit einer endlichen Auflösung eines fortlaufenden konstanten Zeitintervalls
 .
Das Zeitintervall
muss genügend klein sein, damit dominante Systembewegungen auch erfasst werden
können, bzw. der Approximationsfehler gegenüber dem Verlauf der analytischen
Funktion gering ist. Es werden hier zur Kennzeichnung der physikalischen
Unterschiede der Zeitdiskretisierung folgende Definitionen festgelegt:
.
Das Zeitintervall
muss genügend klein sein, damit dominante Systembewegungen auch erfasst werden
können, bzw. der Approximationsfehler gegenüber dem Verlauf der analytischen
Funktion gering ist. Es werden hier zur Kennzeichnung der physikalischen
Unterschiede der Zeitdiskretisierung folgende Definitionen festgelegt:
-
ist ein Parameter der diskreten Zeit, keine reale Zeit.
wird z.B. bei der Berechnung der Differenzengleichungen verwendet.
-
(auch
 oder
oder  )
ist eine reale Zeit, mit der ein kontinuierliches Signal im Takt von
abgetastet wird.
)
ist eine reale Zeit, mit der ein kontinuierliches Signal im Takt von
abgetastet wird.
 im Abstand
durch eine Sample-and-Hold-Schaltung
nullter Ordnung.
im Abstand
durch eine Sample-and-Hold-Schaltung
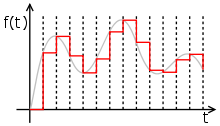
nullter Ordnung.Abtastfolge und Wertefolge: In der Mathematik wird eine Auflistung von endlich und unendlich vielen fortlaufend nummerierten Objekten als Folge bezeichnet.
Die Abtastfolge
bedeutet eine Nummerierung der Folgeglieder der Wertefolge des Eingangssignals
(Eingangsfolge) und des Ausgangssignals (Ausgangsfolge) eines Systems.
Eine Wertefolge besteht aus
oder  vielen Folgegliedern. Das Objekt mit der Nummer i wird i-tes Folgeglied oder
i-te Komponente der Folge genannt. Die abgetasteten und digitalisierten Signale
entsprechen einer Folge von modulierten impulsförmigen Signalen
vielen Folgegliedern. Das Objekt mit der Nummer i wird i-tes Folgeglied oder
i-te Komponente der Folge genannt. Die abgetasteten und digitalisierten Signale
entsprechen einer Folge von modulierten impulsförmigen Signalen  im Abstand ,
die erst nach der A/D-Wandlung mit einer Haltestufe zu einem gestuften quasi
kontinuierlichem Signal
werden.
im Abstand ,
die erst nach der A/D-Wandlung mit einer Haltestufe zu einem gestuften quasi
kontinuierlichem Signal
werden.
Die z-Transformierten und die Laplace-Transformierten verhalten sich ähnlich
bei der algebraische Behandlung der Einzelsysteme des z- und s-Bereichs und in
den Transformations-Rechenregeln. Sowohl im z- wie auch im s-Bereich lassen sich
die Übertragungsfunktionen
oder
der dynamischen Systeme mittels Nullstellenzerlegung der Systemanalyse und
Systemsynthese unterziehen.
Trotz der ähnlichen Eigenschaften der z-Transformierten im Vergleich zur s-Transformierten besteht bei der Behandlung von Signalen und dynamischen Systemen mit der z-Transformation ein höherer mathematischer und signaltechnischer Schwierigkeitsgrad.
Während die Laplace-Transformation sich mit Signalen und dynamischen Systemen
des Zeitbereichs zur Wandlung in den Bildbereich
und umgekehrt, mit der inversen Laplace-Transformation in den Zeitbereich
befasst, hat die Behandlung mit der z-Transformation zum z-Bereich weitere
mathematische Zwischenformen. Es handelt sich bei der z-Transformation um die
Beziehungen der Signale und dynamische Systeme vom Zeitbereich in den:
- Zeitdiskreten Bereich :
Kontinuierliche Signale
werden zu Signalfolgen impulsförmig abgetastet mit der Folge
![k=[0,1,2,3,\dots ]](/svg/c9fe1599c4eb24c9a688785ec976333a50a69a07.svg) zu Wertefolgen
zu Wertefolgen ![u(kT_{A})=[u_{0}(0),u_{1}(1T_{A}),u_{2}(2T_{A}),u_{3}(3T_{A}),\dots ]](/svg/88cbb2f6afd5fc5b0dd094ab3548be0c91ca333d.svg) im zeitlichen Abstand .
im zeitlichen Abstand . - Digitale Signalberechnung mit Differenzengleichungen
![y_{{(k)}}=f[\Delta t,T,k,k-1,u_{{(k)}}]](/svg/139686cb0ebae5518598473af170833c5c4cb998.svg) ,
, - Überführung in den z-Bereich
und zurück in den diskreten Zeitbereich
und Zeitbereich .
Bezeichnung der Transformationen im -,
-,
-
und -Bereich:
- Laplace-Transformierte einer Zeitfunktion f(t) ergibt sich zu:

- Inverse Laplace-Transformation von F(s):

- z-Transformierte einer Wertefolge :

- Inverse z-Transformation von F(z):
Z-Transformation von Abtastsignalen
Die z-Transformation eines abgetasteten Signals  entspricht dem Austausch der komplexen Variable
entspricht dem Austausch der komplexen Variable  der s-Transformierten durch die komplexe z-Variable
der s-Transformierten durch die komplexe z-Variable  .
Dadurch wird eine unendliche Summe der Exponentialterme in eine Potenzreihe in
.
Dadurch wird eine unendliche Summe der Exponentialterme in eine Potenzreihe in
 überführt (spezielle Laurent-Reihe).
überführt (spezielle Laurent-Reihe).

Für die z-Transformation eines zeitdiskreten Eingangssignals
in vereinfachter Schreibweise
gilt:

Grundlagen Differenzengleichungen für lineare zeitinvariante Systeme
Für die numerische Berechnung des Systemverhaltens eines dynamischen Systems
g(t) oder im Zusammenhang mit der z-Transformation werden Differenzengleichungen
 benötigt. Mit ihrer Hilfe lässt sich das Systemverhalten, die
Systemausgangsgröße y(t), dynamischer Systeme g(t) für ein gegebenes
Eingangssignal
im zeitdiskreten Bereich
benötigt. Mit ihrer Hilfe lässt sich das Systemverhalten, die
Systemausgangsgröße y(t), dynamischer Systeme g(t) für ein gegebenes
Eingangssignal
im zeitdiskreten Bereich  berechnen.
berechnen.
Differenzengleichungen entstehen meist aus systembeschreibenden gewöhnlichen Differenzialgleichungen, deren Differentialquotienten durch Differenzenquotienten ersetzt werden. Die kontinuierlichen mathematischen Operationen der Integration und Differentiation werden zeitdiskret durch Summen- und Differenzenbildung angenähert.
Die Differenzengleichungen beschreiben mit dem Approximationsalgorithmus für
ein kleines Zeitintervall
die Signaländerungen nach jedem Zeitintervall als Funktion des betreffenden
Teilsystems (Linearfaktoren im s-Bereich) und des Eingangssignals. Mit der
fortlaufenden Wiederholung der Berechnung mit dem Zeitintervall
und Addition der Änderungsergebnisse zum vorherigen Ergebnis ergibt sich der
Signalverlauf eines Systems über die Zeit  .
.
Es bestehen verschiedene mathematische Verfahren, zeitkontinuierliche Systeme in zeitdiskrete Systeme zu beschreiben und umzuwandeln.
Differenzengleichungen der einfachsten Art beziehen sich auf die den Linearfaktoren der Übertragungsfunktion G(s) zugehörigen Differenzialgleichungen erster Ordnung, deren Differentialquotienten durch Differenzenquotienten ersetzt werden. Diese Beziehung ist von großer Bedeutung, weil nur 4 verschiedene Typen von Differenzengleichungen erster Ordnung existieren, mit denen alle Formen von linearen Übertragungssystemen gebildet werden können, auch solche mit Schwingungsanteilen mit konjugiert komplexen Polen oder Nullstellen. Diese Teilsysteme können beliebig multiplikativ, additiv, zurück gekoppelt oder strukturell vermascht sein und gelten sowohl für den s-Bereich wie auch im diskreten Zeitbereich.
Meistens wird zur Aufstellung der Differenzengleichungen das explizite
Euler-Rückwärtsverfahren der Rechteckapproximation als einfachstes Verfahren
verwendet. Nach diesem Verfahren können aus den zugehörigen
Differenzialgleichungen der 4 Elementarsysteme G(s) erster Ordnung der
Übertragungsfunktionen Differenzengleichungen gebildet werden, indem an Stelle
des Differenzialquotienten mit  der Differenzenquotient
der Differenzenquotient  näherungsweise eingeführt wird.
näherungsweise eingeführt wird.
In der Regel wird davon ausgegangen, dass die inneren Systemspeicher des
Übertragungssystems sich im Ruhezustand befinden und die Anfangswerte bei t = 0
für  und alle Ableitungen von
und alle Ableitungen von  Null sind.
Null sind.
Beispiel der Entwicklung der Differenzengleichung der Integration (I-Glied) aus der Differenzialgleichung:
| Die Übertragungsfunktion des I-Gliedes lautet:
Die zugehörige Differenzialgleichung lautet: Der Differenzenquotient wird an Stelle des Differenzialquotienten
Damit lautet die nach In gleicher Weise können die Differenzengleichungen von Systemen erster Ordnung aus den zugehörigen Differenzialgleichungen abgeleitet werden. |


 eingesetzt.
eingesetzt. und
und  :
:
 .
.
| Elementarsysteme | P-Glied | I-Glied | D-Glied | PD1-Glied | PT1-Glied |
|---|---|---|---|---|---|
| Übertragungsfunktion |  |
 |
 |
 |

|
Differenzengleichungen
|
 |
 |
![[u_{(k)}-u_{(k-1)}]\cdot {\frac {T}{\Delta t}}](/svg/21f1093aa7e996627ab57c244391bff463bba901.svg) |
![K_{{PD1}}\cdot \left[u_{{(k)}}+(u_{{(k)}}-u_{{(k-1)}})\cdot {\frac {T}{\Delta t}}\right]](/svg/4964e48c7a70c77f927b08b345e198c4803973e4.svg) |
![y_{(k-1)}+[K_{PT1}\cdot u_{(k)}-y_{(k-1)}]\cdot {\frac {\Delta t}{T+\Delta t}}](/svg/e9b2775ab1319b5552521c2fd7d20904f1b683de.svg)
|
(Mit K = Verstärkungsfaktor,
= aktuelle Ausgangsgröße,  = vorherige Ausgangsgröße, T = Zeitkonstante,
= aktuelle Eingangsgröße)
= vorherige Ausgangsgröße, T = Zeitkonstante,
= aktuelle Eingangsgröße)
Die einmalige Anwendung einer Differenzengleichung  zum Zeitpunkt
zum Zeitpunkt  ergibt für eine gegebene Eingangsfolge
ein Folgeglied der Ausgangsfolge .
Jedes Folgeglied
bezieht sich auf eine zurückliegende Folge .
Deshalb wird eine solche Differenzengleichung als Rekursionsgleichung
bezeichnet, weil jedes Folgeglied eine Funktion des vorherigen Folgegliedes ist.
ergibt für eine gegebene Eingangsfolge
ein Folgeglied der Ausgangsfolge .
Jedes Folgeglied
bezieht sich auf eine zurückliegende Folge .
Deshalb wird eine solche Differenzengleichung als Rekursionsgleichung
bezeichnet, weil jedes Folgeglied eine Funktion des vorherigen Folgegliedes ist.
Die rekursive Anwendung von
Differenzengleichungen zur Berechnung von Eingangs-Wertefolgen zu
Ausgangs-Wertefolgen bedeutet die angenäherte Lösung der systembeschreibenden
Differentialgleichung des Systemausgangssignals
von Wertefolgen (Berechnungspunkten)  .
.
Mit Hilfe eines Personal Computers kann das Systemverhalten eines dynamisches Systems
oder eines Regelkreises mit Differenzengleichungen vollständig simuliert
werden. Dabei wird eine endliche Anzahl
von Berechnungsfolgen (Wertefolgen) festgelegt und die Rechenergebnisse der
Teilsysteme - das Systemverhalten - tabellarisch und grafisch als
Berechnungspunkte im Abstand
dargestellt. Die Differenzengleichung enthält bereits die Lösungsvorschrift der
Systemausgangsgröße in Annäherung an die systembeschreibende
Differentialgleichung.
Handelt es sich bei dem dynamischen System um eine Hardware mit einer im
zeitlichen Abstand
abgetasteten Eingangsfolge ,
die über einen Mikrocomputer mit Differenzengleichungen zu einer Ausgangsfolge
berechnet wird, kann mit Hilfe eines Haltegliedes
eine treppenförmig gestufte quasi kontinuierliche Ausgangsgröße y(t) als
Beispiel der prinzipiellen Funktion eines digitalen Reglers erreicht werden.
Regelstrecken liegen in der Praxis meist als kontinuierliche Systeme vor, die
eine kontinuierliche Stellgröße benötigen.
Differenzengleichungen höherer Ordnung
Differenzengleichungen können auch aus gewöhnlichen Differenzialgleichungen
höherer Ordnung entwickelt werden, wenn ab dem Zeitpunkt  die letzten vergangenen Ausgangs-Wertefolgen mit
die letzten vergangenen Ausgangs-Wertefolgen mit ![k=[-1\to -n]](/svg/a01d3fff736891fdc4822b7d11fdb875a9b31237.svg) und die Eingangs-Wertefolgen mit
und die Eingangs-Wertefolgen mit ![k=[-1\to -m]](/svg/1f7cd54355a41d43102cd7bc489c62994f90d30d.svg) bekannt sind.
bekannt sind.
Zeitkontinuierliche lineare Systeme werden im Zeitbereich durch die
gewöhnlichen Differenzialgleichungen n-ter Ordnung mit konstanten
Koeffizienten für  beschrieben. Dabei sind n und m die höchsten Ableitungen der Ausgangssignale
und Eingangssignale .
beschrieben. Dabei sind n und m die höchsten Ableitungen der Ausgangssignale
und Eingangssignale .
Eine gegebene gewöhnliche Differentialgleichung wird durch den Koeffizienten
 dividiert, um
freistellen zu können. Diese Form der Differentialgleichung wird entsprechend
der dargestellten Koeffizienten wie folgt neu geordnet.
dividiert, um
freistellen zu können. Diese Form der Differentialgleichung wird entsprechend
der dargestellten Koeffizienten wie folgt neu geordnet.
 .
.
Diese Differentialgleichung kann in eine Differenzengleichung überführt werden:
-
wird vereinfacht als
geschrieben und entspricht einem aktuellen Folgeglied.
- Die kontinuierlichen Systemgrößen
 und
und  werden zeitdiskret dargestellt.
werden zeitdiskret dargestellt. - Die Ableitungen im Zeitbereich
werden entsprechend der Ordnung durch Differenzenquotienten
 der zugehörigen Ordnung ersetzt.
der zugehörigen Ordnung ersetzt.
- Jede Ableitung der Systemgrößen wird im zeitdiskreten Bereich entsprechend der Ordnung als zurückliegende Folgeglieder der Eingangs- und Ausgangsfolgen k-1 bis k-n oder k-m berücksichtigt.
Daraus folgt die Differenzengleichung:
 .
.
Damit kann die allgemeine Form der Differenzengleichung nach
aufgelöst werden:
 .
.
Für die numerische Berechnung eines dynamischen Systems wird die s-Übertragungsfunktion oder die zugehörige Differentialgleichung benötigt. Die Umsetzung einer systembeschreibenden Differentialgleichung in eine angenäherte Differenzengleichung zur Beschreibung von Eingangsfolgen und Ausgangsfolgen eines dynamischen Systems wird ermöglicht, wenn die Differentiale der Differentialgleichung durch Rückwärts-Differenzenquotienten über die Abtastperiode ersetzt werden.
Die folgenden Ableitungen der Differentialquotienten in Differenzenquotienten der 1. 2. und 3. Ordnung sind gegeben:
Differenzenquotient 1. Ordnung:

Der Differenzenquotient 2. Ordnung entsteht aus Differenzen der Differenz:

Der Differenzenquotient 3. Ordnung lautet:

Nach erfolgtem Einsetzen der Differenzenquotienten in die Differenzengleichung eines dynamischen Systems lassen sich die neuen Koeffizienten aus den Koeffizienten der Differentialgleichung berechnen.
Beispiel der Entwicklung einer Differenzengleichung zur Berechnung der
Sprungantwort eines  -Gliedes
mit konjugiert komplexen Polen:
-Gliedes
mit konjugiert komplexen Polen:
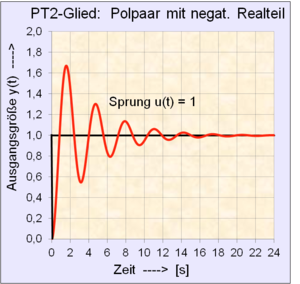

Gegeben: Übertragungsfunktion im s-Bereich:
Gesucht: Differenzengleichung Zugehörige Differentialgleichung nach dem Differentiationssatz der Laplace-Transformation: Die Differenzenquotienten für Die Brüche werden in einzelne additive Terme aufgelöst, um
Berechnungsbeispiel für einige Werte der Ausgangsfolge
|


 und
und 


 :
:
 .
. .
. .
. .
.Diese Differenzengleichung entspricht einem Rekursionsalgorithmus eines dynamischen Systems, der schrittweise mit einem digitalen Rechner gelöst werden kann.
Die rekursive Berechnung der Differenzengleichung 2. Ordnung bezieht sich für
die aktuelle Ausgangsfolge
durch Einsetzen der zurückliegenden Werte der Ausgangsfolge  und
und  in die Gleichung. Für das 1. Folgeglied der Berechnungsfolge k=0 sind die
zurückliegenden Werte der Ausgangsfolge noch nicht verfügbar und damit Null. Die
Anzahl
in die Gleichung. Für das 1. Folgeglied der Berechnungsfolge k=0 sind die
zurückliegenden Werte der Ausgangsfolge noch nicht verfügbar und damit Null. Die
Anzahl  der Glieder der Ausgangsfolge wird durch die diskrete Zeit
und durch die gewünschte zu beobachtende Gesamtzeit des Einschwingvorgangs
bestimmt.
der Glieder der Ausgangsfolge wird durch die diskrete Zeit
und durch die gewünschte zu beobachtende Gesamtzeit des Einschwingvorgangs
bestimmt.
Z-Transformation zeitdiskreter Signale und dynamischer Systeme
Die z-Transformation wird auf zeitdiskrete Signale ,
auf die systembeschreibenden Differenzengleichungen
und auf Übertragungsfunktionen des s- und z-Bereiches meist mit Hilfe der
Korrespondenztabellen angewendet.
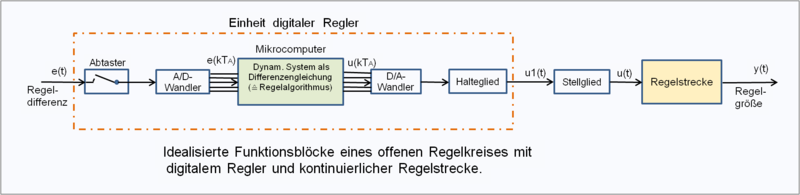
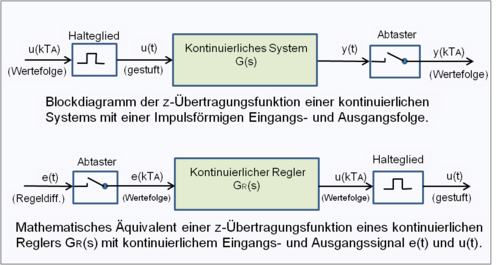
Das nebenstehende Bild ist ein Beispiel der Darstellung der Signalarten und Systeme an einem aufgeschnittenen digitalen Regelkreis mit einer kontinuierlichen Regelstrecke.
Abtastsysteme wandeln in Verbindung mit A/D-Wandlern ein kontinuierliches Signal in ein zeitdiskretes Signal als Wertefolge um. D/A-Wandler in Verbindung mit Haltesystemen nullter Ordnung wandeln eine Wertefolge in ein gestuftes zeitkontinuierliches Signal um.
Rechenregeln der z-Transformation
Wie die Laplace-Transformation wird die z-Transformation durch Sätze und Rechenregeln definiert, dennoch bestehen in einigen Funktionen große Unterschiede.
Die Transformationen und Rücktransformationen der z-Transformation erfolgen meist mit Hilfe von Transformations-Tabellen. In der Fachliteratur werden in Tabellen die Zeitfunktionen f(t), die Laplace-Transformierten f(s) und die z-Transformierten f(z) dargestellt. Nicht vorhandene Zeitfunktionen für die inverse z-Transformation können wie bei der Laplace-Transformation durch die Partialbruchzerlegung bestimmt werden.
Die Verfahren der Anwendung der Rechenregeln der z-Transformationen sind umfangreich und können in diesem Abschnitt nur angedeutet werden. Die nachstehenden meist tabellarisch aufgeführten Verfahren sind in jedem guten Fachbuch der Regelungstechnik oder in Vorlesungsmanuskripten der z-Transformation zu finden.
- Diese Rechenregeln beziehen sich auf Linearitätssätze, Multiplikationssatz, Divisionssatz, Ähnlichkeitssätze, Dämpfungssatz, Verschiebungssätze (rechts-links), Differenzensätze (Rückwärts-Vorwärts), Summationssatz, Faltungssatz, Grenzwertsätze.
- Die z-Transformationen und die z-Rücktransformationen können mit Hilfe von Transformations-Tabellen und verschiedenen noch dargestellten Verfahren durchgeführt werden.
Die nachfolgenden mathematischen Beziehungen gelten für Systeme mit einem
Eingangssignal
und einem Ausgangssignal .
Für einen digitalen Regler müssen die zugehörigen Größen des Eingangssignals
 und Ausgangssignals
in die Gleichungen eingesetzt werden.
und Ausgangssignals
in die Gleichungen eingesetzt werden.
Mit
 wird die s-Ebene auf die z-Ebene abgebildet.
wird die s-Ebene auf die z-Ebene abgebildet.Die wichtigsten Eigenschaften der z-Transformation:
- Grundlagen der Definitionen im z-Bereich:
- z-Variable:
- z-Transformierte einer Folge :
- Inverse z-Transformation von F(z):
- Für Grenzbetrachtungen treten häufig folgende Fälle auf:
- Für den s-Bildbereich gilt für die s-Variable.
- Für den z-Bildbereich gilt für die z-Variable:




- Anfangswert einer zeitdiskreten Folge:

- Rückwärtsverschiebung (nach rechts):
- Totzeiten innerhalb eines Digitalreglers entstehen durch die
Signalabtastung über A/D-Wandler, D/A-Wandler und durch die Rechenzeit des
Mikrocomputers. Die Berechnung einer Totzeit
 einer Abtastfolge entspricht einer Rückwärtsverschiebung (Rechtsverschiebung)
der Abtastfolge (Zahlenwerte) um d Abtastschritte von .
Diese mathematische Operation bedeutet im s-Bereich für die Totzeit
einer Abtastfolge entspricht einer Rückwärtsverschiebung (Rechtsverschiebung)
der Abtastfolge (Zahlenwerte) um d Abtastschritte von .
Diese mathematische Operation bedeutet im s-Bereich für die Totzeit  und im z-Bereich:
und im z-Bereich:

- Vorwärtsverschiebung (nach links):
- Eine Vorhersage um die Zeit
 einer Wertefolge entspricht einer Vorwärtsverschiebung nach links um
d-Abtastschritte. Diese Operation entspricht der Laplace-Transformierten
einer Wertefolge entspricht einer Vorwärtsverschiebung nach links um
d-Abtastschritte. Diese Operation entspricht der Laplace-Transformierten  und bedeutet im z-Bereich:
und bedeutet im z-Bereich:

- Differentiation:
- Die Differenz zweier aufeinander folgender Abtastwerte dividiert durch die
Abtastzeit entspricht der Annäherung an einen Differenzialquotienten im
Zeitbereich.

- Integration:
- Wird die Summe aller Abtastwerte mit der Abtastzeit TA
multipliziert, entsteht in Annäherung an den Zeitbereich die numerische
Integration. Im s-Bereich entspricht die Integration 1 / s. Im z-Bereich gilt
die Integration:

- Gewichtsfolge:
- Die z-Übertragungsfunktion G(z) ist die z-Transformierte der Gewichtsfolge
g(k).

- In G(z) und g(k) sind alle Eigenschaften eines linearen, zeitdiskreten dynamischen Systems enthalten.
- Multiplikation:
- Ausgangssignal als Funktion des Eingangssignals und der
z-Übertragungsfunktion

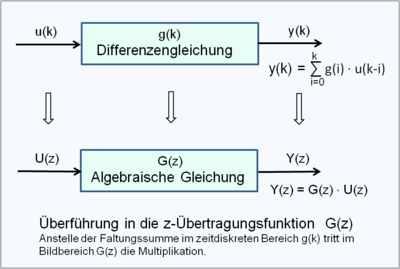
- Faltung der Impulsfolgen:

Im Bildbereich steht die Multiplikation an Stelle der Faltungssumme, wie bei zeitkontinuierlichen Systemen an Stelle des Faltungsintegrals.
Tabelle der Korrespondenzen des Zeitbereichs f(t), des Laplace- und z-Bereichs (Auszüge)
| Funktion im Zeitbereich f(t) |
Laplace-Transformierte im Bildbereich F(s) |
Diskrete Laplace-Transformierte nach der z-Transformation 
|
|---|---|---|
| δ-Impuls | 1 | 1 |
| Einheits- sprung 1 |
 |

|
| t |  |

|
 |
 |

|
 |
 |

|
 |
 |
>
|
 |
 |

|
 |
 |

|
 |
 |

|
 |
 |

|
 |
 |

|
 |
 |
 
|
 |
 |

|
 |
 |

|
 |
 |

|
- TA = Abtastzeit, a oder b = Zahlenwert der Nullstelle (Pol) im s-Bereich, T1 = Zeitkonstante der s-Übertragungsfunktion.
Tabelle
der Korrespondenzen der zeitdiskreten Funktionen
zum z-Bereich
(Auszüge)
| Name der Zeitfunktion |
Wertefolge |
z-Transformierte |
|---|---|---|
 -Impulsfolge -Impulsfolge |
![f_{{(k)}}=[0(-T_{A}),1(0T_{A}),0(T_{A}),0(2T_{A}),0(3T_{A}),\dots ]](/svg/b5a49ecc0ed3eabb1604a7565ea061fb83740b9d.svg) |
1 |
| Sprungfolge | ![f_{{(k)}}=[0(-T_{A}),1(0T_{A}),1(T_{A}),1(2T_{A}),1(3T_{A}),\dots ]](/svg/6265e2e08e5829b3902f8481e76c5b7a815ab440.svg) |
|
| Anstiegsfolge | ![u_{{(k)}}=[-u_{1}(-T_{A}),u_{0}(0T_{A}),u_{1}(T_{A}),u_{2}(2T_{A}),u_{3}(3T_{A}),\dots ]](/svg/92be6703e30856979b98dad3f66c90f34543a8d5.svg) ![k=[-1,0,1,2,3,\dots ]](/svg/e11e42748c7ad00f821d2a1eb3fc301a818d9801.svg) |

|
| Potenzfolge |  |
|
| e-Funktionsfolge |  |

|
| Sinusfunktionsfolge |  |

|
| Kosinusfunktionsfolge |  |

|
| Abklingende Sinus- funktionsfolge |
 |

|
| Abklingende Cosinus- funktionsfolge |
 |

|
| Linearitätssatz |  |

|
| Rechts-Verschiebesatz |  |

|
| Faltungssumme |  |

|
| Anfangswertsatz |  |

|
| Endwertsatz |  |

|
Z-Transformation einer Wertefolge (Impulsfolge)
Die Laplace-Transformation bezieht sich auf die Ableitungen einer
gewöhnlichen Differentialgleichung und ersetzt diese nach dem
Laplace-Differentiationssatz durch die komplexe Variable .
Ein Exponent von s kennzeichnet die Ordnung der Ableitung.
Die z-Transformation transformiert eine Impulsfolgefunktion  oder eine Zahlenfolge
in eine Funktion
mit der z-Variable
oder eine Zahlenfolge
in eine Funktion
mit der z-Variable  .
.
Da die Berechnungen mit Impulsfunktionen oder Folgen aufwendig sind, ist es sinnvoll, diese durch einfachere Berechnungen im z-Bildbereich auszuführen. Die z-Transformation von Impulsfolgen kann als diskrete Laplace-Transformation aufgefasst werden.
Die zu diskreten Zeitpunkten abgetasteten kontinuierlichen Eingangssignale
entsprechen mit der Eingangsgröße modulierten (gewichteten) -Impulsfolgen,
die mit der z-Transformation berechnet werden.
Beim Übergang von kontinuierlichen Systemen f(t) zu Abtastsystemen
mit der Abtastfolge
gehen lineare zeitinvariante Differenzialgleichungen in zeitinvariante
Differenzengleichungen der Abtastzeit TA beziehungsweise der
Abtastfrequenz  der Funktion
über.
der Funktion
über.
Kontinuierliche Signale z.B. die Regelabweichung
eines Regelkreises mit einer analog arbeitenden Regelstrecke werden zu gleichen
Zeitabständen
abgetastet. Ein Abtaster mit A/D-Wandler erzeugt aus einem zeitkontinuierlichen
Regler-Eingangssignal
ein zeitdiskretes Signal .
Es können sowohl abgetastete Regler-Eingangssignale
als auch Differenzengleichungen  ,
die im diskreten Zeitbereich den Regelalgorithmus eines Reglers beschreiben, als
z-Übertragungsfunktionen in den z-Bereich transformiert und als algebraische
Gleichungen behandelt werden.
,
die im diskreten Zeitbereich den Regelalgorithmus eines Reglers beschreiben, als
z-Übertragungsfunktionen in den z-Bereich transformiert und als algebraische
Gleichungen behandelt werden.
Wird eine inverse z-Transformation der z-Übertragungsfunktionen durchgeführt,
entsteht die Lösung der zeitdiskreten Differenzengleichung  im -Bereich.
Mit Hilfe verschiedener Verfahren der Rücktransformation vom z-Bereich in den
k-Bereich ergeben sich dann als Lösung die Differenzengleichungen des
Regelalgorithmus für den diskreten Bereich f(k).
im -Bereich.
Mit Hilfe verschiedener Verfahren der Rücktransformation vom z-Bereich in den
k-Bereich ergeben sich dann als Lösung die Differenzengleichungen des
Regelalgorithmus für den diskreten Bereich f(k).
Für die häufig vorkommenden Transformationen des k- und z-Bereiches stehen in vielen Fachbüchern der Regelungstechnik Transformationstafeln zur Verfügung.
Eine einzelne Abtastung eines kontinuierlichen Signals u(t) an einer
beliebigen Stelle des Signalverlaufs z.B. zum Zeitpunkt  wird als Modulation von u(t) mit einem Dirac-Impuls
mit
wird als Modulation von u(t) mit einem Dirac-Impuls
mit  beschrieben.
beschrieben.
Damit ergibt sich für die Multiplikation des Eingangssignals u(t) mit dem Dirac-Impuls:

Wird nun periodisch mit zu den Zeitpunkten  das Signal u(t) abgetastet, kann das abgetastete Signal
das Signal u(t) abgetastet, kann das abgetastete Signal  als Multiplikation einer -Impulsfolge
mit u(t) betrachtet werden.
als Multiplikation einer -Impulsfolge
mit u(t) betrachtet werden.
Die Impulsfolgefunktion bezieht sich auf die Summengrenzen von  zu
zu

Mit dem Übergang der Summengrenzen von  zu
wird die Impulsfolgefunktion:
zu
wird die Impulsfolgefunktion:

Die Impulsfolgefunktion wird der Laplace-Transformation unterzogen:

Mit der z-Variablen
und  wird die Gleichung vereinfacht zu der z-Transformierten des kontinuierlichen
Signals .
wird die Gleichung vereinfacht zu der z-Transformierten des kontinuierlichen
Signals .
Mit
wird die s-Ebene auf die z-Ebene abgebildet.
Damit lautet die z-Transformation eines abgetasteten kontinuierlichen Signals
mit der Folge
und der Wertefolge ![u(kT_{A}):=u_{{k}}=[u_{{(0)}};u_{{(T_{A})}};u_{{(2T_{A})}};u_{{(3T_{A})}};\cdots ]](/svg/10f35e0e53ab9bd429738b233bd955ed7f709c30.svg) :
:

oder allgemein als Funktion F(z):

Z-Übertragungsfunktion (Impulsübertragungsfunktion) von zeitdiskreten Elementen
Übersicht:
- Die Differenzengleichungen
können ausschließlich mit Hilfe des Linearitätssatzes und Verschiebungssatzes
in den komplexen z-Bildbereich und in die z-Übertragungsfunktionen
 überführt werden.
überführt werden.
- Wendet man auf die einzelnen Terme der Differenzengleichung den
Linearitäts- und den rechts-Verschiebungssatz an und bringt alle Terme mit
auf die linke Seite und alle Terme mit
auf die rechte Seite der Differenzengleichung, so lässt sich das Verhältnis
mit den verbleibenden Elementen als gebrochen-rationale Funktion
darstellen.
- Die z-Übertragungsfunktion lautet:

- Gegebene Übertragungsfunktionen des s-Bereiches in Verbindung mit Haltegliedern und Abtastelementen können ebenfalls mit Hilfe der Korrespondenztabellen als z-Übertragungsfunktion transformiert werden.
- Die Rücktransformation von der z-Übertragungsfunktion in den zeitdiskreten
Bereich als Differenzengleichung erfolgt durch den invers angewendeten
Linearitätssatz und Verschiebungssatz für alle einzelnen Terme. Durch die
kreuzweise Multiplikation von
und
mit den Polynomen im Zähler und Nenner der z-Übertragungsfunktion entsteht
wieder eine Differenzengleichung ,
wenn die einzelnen Terme der inversen Transformation unterzogen
werden.
Mit der so errechneten Differenzengleichung des Übertragungssystems ist man
nun in der Lage, für eine gegebene Eingangserregung
des Systems die Ausgangsfolgen des Systems
zu berechnen. Dies ist auf verschiedenen Arten möglich.
- Analytische Berechnung mit Hilfe der Korrespondenztabellen der z-Transformation,
- Rekursive Berechnung von Systemantworten der Differenzengleichungen mit Bezug auf zurückliegende Folgen k.
Entstehung der z-Übertragungsfunktion:
Ein zeitdiskretes dynamisches System wird durch eine rekursive Differenzengleichung beschrieben.
Wie bei zeitkontinuierlichen Systemen g(t) und der Übertragungsfunktion G(s) besteht eine vergleichbare Beziehung bei den zeitdiskreten Systemen zwischen der Gewichtsfolge g(k) und z-Übertragungsfunktion G(z). Die Übertragungsfunktion G(z) ist die z-Transformierte der Gewichtsfolge g(k).
In G(z) und g(k) sind alle Eigenschaften eines dynamischen Systems enthalten. Zur Systemberechnung wird der Verlauf des Eingangssignals U(z) und das Systemverhalten G(z) oder g(k) benötigt.
Für die Ermittlung der z-Übertragungsfunktion ist die Gewichtsfunktion g(t)
die Systemantwort (Impulsantwort) auf die Vorgabe eines Eingangs-DIRAC-Impulses
(t).
Bei der Laplace-Transformation eines Systems lautet die Übertragungsfunktion:

Aus der Gewichtsfunktion wird die Impulsfolgefunktion  oder die Gewichtsfolge g(kTA) gebildet und in den z-Bereich
transformiert. Die z-Übertragungsfunktion von zeitkontinuierlichen Systemen
ergibt sich mit folgender Vorschrift:
oder die Gewichtsfolge g(kTA) gebildet und in den z-Bereich
transformiert. Die z-Übertragungsfunktion von zeitkontinuierlichen Systemen
ergibt sich mit folgender Vorschrift:

Die Berechnung der Impulsübertragung von linearen zeitdiskreten Systemen vereinfacht sich, wenn aus der Differenzengleichung mit der z-Transformation die z-Übertragungsfunktion bestimmt wird. So können z.B. die Regelalgorithmen eines digitalen Reglers mit Differenzengleichungen formuliert werden.
Ist die z-Übertragungsfunktion eines Systems G(z) gegeben, lässt sich die zugehörige z-Differenzengleichung bestimmen:
- durch Ausmultiplizieren von Zähler und Nenner
 und
und  und Gleichungsumstellung nach y(z),
und Gleichungsumstellung nach y(z), - Anwendung des rechts-Verschiebesatzes der z-Transformation zur Bestimmung
der Ausgangsgröße .
Es wird eine lineare Differenzengleichung eines Regelalgorithmus gegeben:
Die Eingangssignale der Differenzengleichung sind wieder
und die Ausgangssignale .

Unter der Voraussetzung, dass die Anfangswerte des zeitdiskreten Systems gleich Null sind, wird die Differenzengleichung transformiert. Mit den Rechenregeln des rechts-Verschiebungssatzes ergibt sich die Transformationsvorschrift:
 ,
,

Die z-transformierte Differenzengleichung ergibt sich zu:

Durch Ausklammern des Quotienten Y(z) / U(z) kann die Impulsübertragungsfunktion G(z) gebildet werden.
Damit lautet die z-Übertragungsfunktion:

Bei der Berechnung von Differenzengleichungen mit dem Digitalrechner ist die von n-Schritten nach rechts verschobene Gleichung besser geeignet.

Damit lautet die z-Übertragungsfunktion mit negativen Exponenten von z:

Beispiel: Für eine gegebenen Differenzengleichung 3. Ordnung lautet die z-Übertragungsfunktion für Ordnungen m = 2 und n = 3:

Mit der rechts-Verschiebung der zugehörigen Differenzengleichung um n = 3
Abtastschritte
lautet die z-Übertragungsfunktion:

Es fällt auf, dass die z-Transformation einer Differenzengleichung eine große Ähnlichkeit mit der Polynomform einer s-Übertragungsfunktion für kontinuierliche Systeme hat. Ebenso fällt auf, dass die z-Übertragungsfunktion negative Potenzen hat. Allgemein werden z-Übertragungsfunktionen mit negativen Potenzen von z dargestellt.
Jede z-Übertragungsfunktion mit negativen Potenzen von z kann in eine Form mit positiven Potenzen von z gebracht werden, wenn Zähler und Nenner der z-Übertragungsfunktion mit der höchsten vorkommenden inversen z-Potenz multipliziert werden. Für die z-Übertragungsfunktion der Form mit positiven Exponenten muss gelten: Nennerpolynom > Zählerpolynom. Ist diese Bedingung erfüllt, ist G(z) kausal.
Es können sowohl abgetastete Eingangssignale u(kTA) als auch Differenzengleichungen f(kTA), die im diskreten Zeitbereich das Verhalten eines Systems (z.B. den Regelalgorithmus eines Reglers) beschreiben, als z-Übertragungsfunktionen in den z-Bereich transformiert und als algebraische Gleichungen behandelt werden.
Wird eine inverse z-Transformation der z-Übertragungsfunktionen durchgeführt,
entsteht die Lösung der zeitdiskreten Differenzengleichung
im -Bereich.
Mit Hilfe verschiedener Verfahren der Rücktransformation vom z-Bereich in den
k-Bereich ergeben sich dann als Lösung die Differenzengleichungen des
Regelalgorithmus für den diskreten Bereich f(kTA).
Die typische Anwendung der z-Transformation eines digitalen Systems, eines digitalen Reglers oder eines digitalen Filters, für den Regelalgorithmus lautet wie folgt:
- Die Abtastfolge des Eingangssignals (Eingangsfolge) wird transformiert als
z-Übertragungsfunktion
 ,
, - Die Differenzengleichung
 des gewünschten Reglerverhaltens wird transformiert als z-Übertragungsfunktion
,
des gewünschten Reglerverhaltens wird transformiert als z-Übertragungsfunktion
, - Die z-transformierten Systeme werden algebraisch entsprechend der z-Rechenregeln zusammengefasst,
- Mit der inversen z-Transformation des z-Produktes von Signal und Regelalgorithmus entsteht der Berechnungsalgorithmus des digitalen Reglers (Mikro Computers) wieder als Differenzengleichung.
Die Analyse und die Synthese diskreter Signale und Systeme lässt sich mit der z-Transformation erleichtern, setzt aber auch umfangreiches mathematisches Spezialwissen voraus.
Für die häufig vorkommenden Transformationen des k- und z-Bereich stehen in vielen Fachbüchern der Regelungstechnik Transformationstafeln zur Verfügung.
Z-Übertragungsfunktion einer Totzeit
Eine Totzeit Tt hat im Zeitbereich das Verhalten  .
.
Im s-Bereich lautet die Übertragungsfunktion eines Totzeitsystems:

Es handelt sich hier bei der Verbindung einer s-Übertragungsfunktion als gebrochen-rationalen Funktion mit einem Totzeitglied um eine transzendente Funktion, die als Anhang einer Übertragungsfunktion - beispielsweise einer Regelstrecke - multiplikativ zugeordnet wird, mit der Einschränkung, dass keine algebraische Behandlung erlaubt ist.
Im z-Bereich entspricht eine Totzeit
einer Rückwärtsverschiebung (Verschiebung nach rechts) der Abtastfolgen um d
Abtastschritte. Die z-Übertragungsfunktion des Totzeitgliedes in Verbindung mit
weiteren z-Übertragungssystemen bleibt gebrochen-rational (Bruch mit Zähler- und
Nennerpolynom).
Für die z-Transformation der Abtastfolge für das Signal  gilt:
gilt:
Anders als bei der Laplace-Transformation bedeutet ein Totzeitglied in
Verbindung mit einer z-Übertragungsfunktion keine Einschränkung der bestehenden
Form der gebrochen-rationalen Funktion. Eine z-Übertragungsfunktion mit einer
mit  Abtastschritten
definierten Totzeit
wird durch hinzufügen von eines Terms
Abtastschritten
definierten Totzeit
wird durch hinzufügen von eines Terms  berücksichtigt. Es können beliebige algebraische Operationen durchgeführt
werden.
berücksichtigt. Es können beliebige algebraische Operationen durchgeführt
werden.
Beispiel einer z-Übertragungsfunktion mit Totzeit:

Z-Übertragungsfunktion von zeitkontinuierlichen Elementen G(s) mit Abtaster und Halteglied
Definition der Signale: Allgemein gilt für den Zeitbereich ,
zeitdiskreten Bereich
und Bildbereich  ,
,
 die Eingangsgröße
die Eingangsgröße  und die Ausgangsgröße
und die Ausgangsgröße  .
.
Abtastsysteme
erlauben eine Umwandlung kontinuierlicher Signale in zeitdiskrete Abtastfolgen
(Impulsfolgen). Halteglieder erlauben eine Umwandlung zeitdiskreter
Ausgangsfolgen (Impulsfolgen) in kontinuierliche gestufte Signale im
Zeitbereich. Ein Abtaster setzt ein kontinuierliches Signal
in Verbindung mit einem nachgeschalteten A/D-Wandler in eine Zahlenfolge  mit digitalen Werten um.
mit digitalen Werten um.
Ein Halteglied nullter Ordnung setzt eine Zahlenfolge
mit einem vorgeschalteten D/A-Wandler in ein gestuftes kontinuierliches Signal
um. Bei der Reihenschaltung von einem Abtastsystem (gewichteter δ-Abtaster) und
einem Halteglied handelt es sich um die Umwandlung einer aus einem
kontinuierlichen Eingangssignal modulierten Impulsfolge in eine gestufte
Treppenfunktion ,
die in ein kontinuierliches dynamisches System eingeleitet werden kann.
Liegt ein kontinuierliches dynamisches System vor, erlaubt die Abtastung eines kontinuierlichen Signals, z.B. eine Regelabweichung, die Verarbeitung einer zeitdiskreten Eingangsfolge in einem Mikrocomputer als Regelalgorithmus zu einer zeitdiskreten Ausgangsfolge. Die über ein Halteglied geleitete Ausgangsfolge erzeugt ein quasi stetiges gestuftes Ausgangssignal zu einer analogen zeitabhängigen Stellgröße.
Je nach Anwendung des kontinuierlichen Systems ,
beispielsweise in der Regelungstechnik, werden unterschiedlich Funktionsblöcke
zusammengefasst, die auch mehrere Abtaster und Halteglieder enthalten können.
Um ein kontinuierliches System
in eine z-Übertragungsfunktion (Impulsübertragungsfunktion) zu definieren, muss
es im Eingang durch eine Abtastfolge
als Eingangsfolge und am Ausgang des Systems zeitsynchron durch einen Abtaster
die Ausgangsfolge
zur Verfügung stellen.
 mit Abtaster und Halteglied.
mit Abtaster und Halteglied.Je nachdem wie die Reihenfolge der Funktionsböcke eines Haltegliedes  ,
eines Systems
und eines Abtasters festgelegt sind, können diese Funktionsblöcke als ein Teil
einer offenen Regelstrecke betrachtet werden. Die wären z.B.:
,
eines Systems
und eines Abtasters festgelegt sind, können diese Funktionsblöcke als ein Teil
einer offenen Regelstrecke betrachtet werden. Die wären z.B.:
- Ein Haltegliedsystem mit analogem Ausgang, ein dynamisches System
und Abtastsystem für eine Ausgangsfolge,
- Ein Abtastsystem einer analogen Regelabweichung, Mikroprozessor für den
Regelalgorithmus des Systems
und ein Haltegliedsystem für die Ausgabe eines kontinuierlichen Signals als
Stellgröße für eine kontinuierliche Regelstrecke.
Das obere Grafikbild zeigt die Kombination der Funktionsblöcke Halteglied, kontinuierliches System G(s) und Abtaster.
Damit ein kontinuierliches System
in eine (Impuls-)Übertragungsfunktion
definiert werden kann, muss das System durch eine Impulsfolge (Wertefolge)
gespeist und am Ausgang ein Abtaster eingesetzt sein, der synchron zur
Eingangsfolge eine Ausgangsfolge realisiert. Das Halteglied vor dem dynamischen
System wandelt die Impulsfolge in ein quasikontinuierliches Signal um. Das
kontinuierliche System-Ausgangssignal wird über einen Abtaster als Ausgangsfolge
definiert.
Die s-Übertragungsfunktion des Haltegliedes
nullter Ordnung lautet:

Die z-Übertragungsfunktion (Impulsübertragungsfunktion) des Haltegliedes
und der Regelstrecke  wird durch die z-Transformation von
wird durch die z-Transformation von  berechnet.
berechnet.
Die z-Übertragungsfunktion von Halteglied und Regelstrecke lautet:
 /DD>
/DD>
In diese Gleichung wird
eingesetzt:

Eine Multiplikation mit  entspricht im z-Bereich eine Rechtsverschiebung um einen Abtastzyklus
und damit einer Multiplikation mit
entspricht im z-Bereich eine Rechtsverschiebung um einen Abtastzyklus
und damit einer Multiplikation mit  .
.

Die z-Übertragungsfunktion der Reihenschaltung eines Haltegliedes nullter
Ordnung mit einem kontinuierlichen System ergibt sich aus der
Laplace-Transformierten der Sprungantwort ,
multipliziert mit  .
(Siehe Tabelle
.
(Siehe Tabelle  ):
):

Analog wie bei der Regelstrecke
kann für die im 2. Teil des Bildes dargestellte Anordnung der Funktionsblöcke
Abtaster, Regelalgorithmus des Reglers und Halteglied die gleiche Form der
Gleichung der z-Transformation benutzt werden. Ein- und Ausgangsgröße und die
Systemgröße des Reglers  werden getauscht:
werden getauscht:

Um die z-Transformation des kontinuierlichen Systems
bilden zu können, werden die Korrespondenztabellen angewendet. Steht für die
gegebene s-Übertragungsfunktion
kein Eintrag für die z-Transformation zur Verfügung, muss eine
Partialbruchzerlegung von  vorgenommen werden.
vorgenommen werden.
Beispiel: z-Transformation eines  -Gliedes.
-Gliedes.

Gesucht z-Übertragungsfunktion  des kombinierten Systems:
des kombinierten Systems:

Partialbruchzerlegung von

z-Transformation der Partialbrüche in den z-Bereich:

Durch Ausmultiplizieren der Brüche ergibt sich die z-Transformation:

Z-Übertragungsfunktionen der Standardregler
Es gelten hier allgemein die formalen Begriffe der Ein- und Ausgangsgrößen
der Systemtheorie: Eingangssignal = U(z), Ausgangssignal Y(z).
Für die
Belange der Regler gelten die Eingangs- und Ausgangsgrößen des Reglers zu einem
Regelkreis lauten: E(z) und U(z).
Die Regelalgorithmen mit den allgemeinen Koeffizienten lauten nach der
rekursiven Rechenvorschrift:

Die z-Transformation der Differenzengleichung liefert die z-Übertragungsfunktion GR(z) des Reglers:

Tabelle der z-Übertragungsfunktionen der Standardregler (Typ II, Obersumme)
(ai = Koeffizienten des Nennerpolynoms, bi = Koeffizienten der Zählerpolynoms, TI = TN = 1 / KI = Zeitkonstante = Nachstellzeit, TV = Vorhaltezeit, TA = Abtastzeit)
| Reglerart | z-Übertragungsfunktion GR(z) der Standardregler |
|---|---|
| P-Regler | 
|
| I-Regler |  
|
| PD-Regler |  ![b_{0}=K_{R}\cdot [1+{\frac {T_{V}}{T_{A}}}];\ b_{1}=-K_{R}\cdot {\frac {T_{V}}{T_{A}}}](/svg/005f05c1b558573b4c17e7ec22b7504ee8272acb.svg)
|
| PI-Regler |  ![a_{1}=1;\ b_{0}=K_{R}\cdot \left[1+{\frac {T_{A}}{T_{N}}}\right];\ b_{1}=-K_{R}](/svg/3f790291034c297de3aa29fe760d68e0d14012c2.svg)
|
| PID-Regler |  ![a_{1}=1;\ b_{0}=K_{R}\cdot \left[1+{\frac {T_{A}}{T_{N}}}+{\frac {T_{V}}{T_{A}}}\right];\ b_{1}=-K_{R}\cdot \left[1+2\cdot {\frac {T_{V}}{T_{A}}}\right];\ b_{2}=K_{R}\cdot {\frac {T_{V}}{T_{A}}}](/svg/904c88162748668550c2827ef7324884b0135895.svg)
|
Umwandlung einer z-Übertragungsfunktion in eine Differenzengleichung
Eine gegebene z-Übertragungsfunktion lässt sich in eine Differenzengleichung umwandeln. Dazu sind folgende Schritte erforderlich.
Die Übertragungsfunktion wurde durch den Koeffizienten  dividiert, um
dividiert, um  freistellen zu können.
freistellen zu können.
Diese Form der Übertragungsfunktion wurde entsprechend der dargestellten Koeffizienten wie folgt neu geordnet.

- Die Systemausgangsgröße Y(z) und die Systemeingangsgröße U(z) werden kreuzweise mit den Polynomen der z-Übertragungsfunktion multipliziert:

- Die Zähler- und Nennerpolynome werden durch die höchste Potenz von z dividiert:

- Mit der Anwendung des Rechtsverschiebungssatzes der z-Transformation entsteht die Differenzengleichung:
![{b_m \cdot u[k-n+m]+b_{m-1} \cdot u[k-n+m-1]+\dots +b_1 \cdot u[k-n+1]+b_0 \cdot u[k-n]=y[k]+a_{n-1} \cdot y[k-1]+ \dots +a_1 \cdot y[k-n+1]+a_0 \cdot y[k-n]}](/svg/a2207d6053129425a427eca164ad543303add71d.svg)
- Die Differenzengleichung wird nach y(k) aufgelöst. Damit entsteht eine
Rekursionsgleichung zur Berechnung der Ausgangsgröße
des Systems für beliebige Eingangssignale .

Rücktransformation in den diskreten Zeitbereich f(kTA)
Für die Programmierung des Mikrocomputers des Digitalreglers werden Differenzengleichungen benötigt, die durch Überführung der z-Übertragungsfunktion des z-Bildbereiches in den diskreten Zeitbereich f(k) gewonnen wird.
Die inverse z-Transformation liefert für F(z) wieder die Werte der Zahlenfolge:
 für
für  .
.
Dazu sind drei Verfahren gegeben:
- Rücktransformation durch Polynomdivision,
- Durch die Polynomdivision wird die z-Transformierte F(z) in eine
konvergierende Potenzreihe nach
 entwickelt. Dividiert man das Zählerpolynom von F(z) durch das Nennerpolynom
nach den Regeln der Polynomdivision, so ergibt sich die gewünschte
Potenzreihe. Die Vorfaktoren der Potenzen von z sind die gesuchten Werte der
Zahlenfolge .
entwickelt. Dividiert man das Zählerpolynom von F(z) durch das Nennerpolynom
nach den Regeln der Polynomdivision, so ergibt sich die gewünschte
Potenzreihe. Die Vorfaktoren der Potenzen von z sind die gesuchten Werte der
Zahlenfolge .
- Partialbruchzerlegung
- Die Rücktransformation von F(z) erfolgt durch die Partialbruchzerlegung
mit Hilfe der zugehörigen Korrespondenztabelle. Die Partialbrüche sollen die
Form
 haben. Die inverse z-Transformation ergibt
als Summe der rücktransformierten Partialbrüche.
haben. Die inverse z-Transformation ergibt
als Summe der rücktransformierten Partialbrüche.
- Auswertung des Umkehrintegrals (Residuensatz)
- Die inverse z-Transformation ist über das komplexe Umlaufintegral
bestimmt. Die Lösung des Integrals lässt sich auf die Bestimmung der Residuen
 zurückführen.
zurückführen. 
Berechnungsbeispiele zur z-Transformation
Beispiel 1: z-Transformierte der Sprungfunktion der Eingangsgröße  :
:
| Die z-Transformierte der normierten Sprungfunktion
= 1 für t > 0 ist zu ermitteln.
Lösung: Die kontinuierliche Eingangsgröße u(t) wird als Sprungfunktion
(Einheitssprung) zum Zeitpunkt t = 0 mit dem Wert 1 abgetastet. oder die Impulsfolgefunktion: Die z-Transformation lautet damit: Der Grenzwert für |



 für
für  und
und  (Konvergenz) ist Null.
(Konvergenz) ist Null. 
Beispiel 2: z-Transformierte des Produktes einer Exponentialfunktion f(t) mit dem Einheitssprung u(t)=1:
|
Gegeben: Exponentialfunktion
Gesucht: Ergebnis der beiden Beziehungen als Produkt im z-Bereich: Die Ausgangswertefolge Daraus ergibt sich die z-Transformierte: Substituiert man
so lautet die z-Transformierte |

 = 1 für t > 0.
= 1 für t > 0. lautet:
lautet: 

 ,
,
Beispiel 3: Ermittlung der z-Übertragungsfunktion aus einem Verzögerungsglied 1. Ordnung
|
Gegeben: Übertragungsfunktion G(s) des PT1-Gliedes mit der Verstärkung K und der Zeitkonstante T1:
Gesucht: z-Übertragungsfunktion Dazu wird zuerst die Gewichtsfunktion g(t) des PT1-Gliedes ermittelt.
Die Verstärkung K wurde für den Transfer in den Zeitbereich nicht berücksichtigt und wird wieder eingesetzt. Für die Eingangsimpulsfolge Aus einer in Fachbüchern der Regelungstechnik dargestellten
Korrespondenztabelle wird für Daraus ergibt sich unter Berücksichtigung des Faktors |
 Polstelle des Nennerpolynoms.
Polstelle des Nennerpolynoms. .
.
 wird die z-Transformation angewendet.
wird die z-Transformation angewendet.  als Gewichtsfunktion (Impulsantwort)
als Gewichtsfunktion (Impulsantwort)  hat keine Auswirkungen auf die Transformation und wird später
berücksichtigt:
hat keine Auswirkungen auf die Transformation und wird später
berücksichtigt: 

Beispiel 4: z-Übertragungsfunktion einer Differenzengleichung für den Integralalgorithmus:
| Definition der Signale: Analoge Regeldifferenz = ,
Abgetastete Regeldifferenz = ,Reglerausgangsgröße = ,
Zeitkonstante  . .
Gegeben: Differenzengleichung:
Gesucht: z-Übertragungsfunktion. Nach der Transformationsvorschrift ändern sich die Größen: Daraus folgt für die z-Transformation: Wird U(z) / E(z) ausgeklammert, entsteht die z-Übertragungsfunktion des Integralalgorithmus: Für die gleiche Differenzengleichung des Integrationsalgorithmus nach Euler-Rückwärts (Obersumme): lautet die z-Übertragungsfunktion mit Aus der Übertragungsfunktion GR(z) wird die Stellgröße des Reglers U(z) abgeleitet mit der Regelabweichung E(z) = W(z) - Y(z): |

 )
entsteht "Untersumme".
)
entsteht "Untersumme".



 :
:

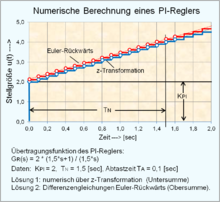
Anwendung der z-Übertragungsfunktion für einen digitalen PI-Regler mit Abtastfunktion und Halteglied
Das nachfolgende Berechnungsbeispiel zeigt die über die z-Transformation ermittelte Differenzengleichung eines digitalen PI-Reglers im Vergleich mit den Differenzengleichungen nach Euler-Rückwärts.
Digitale Regler in industriellen Erzeugnissen werden gegenüber analogen Reglern zunehmend in großen Stückzahlen produziert. Dafür sind verschiedene Gründe gegeben:
- Die Integrationsrate der Mikrorechner hat soweit zugenommen, dass die Schnittstellen wie AD- und DA-Wandler wie auch Haltefunktionen Bestandteil eines einzigen hochintegrierten Bausteins sind.
- Kostengünstige Produktion der Hardware und deren Prüfung,
- Jederzeit - vor Anlagen-Auslieferung - können per Software Parameteränderungen oder Regler-Struktur-Änderungen geändert werden.
Mit der Anwendung der z-Transformation auf abgetastete Signale und des gewünschten Regelalgorithmus entsteht die z-Übertragungsfunktion.
Die Hauptaufgabe der Realisierung eines digitalen Reglers ist die Aufstellung der z-Übertragungsfunktion des Reglers bzw. das Finden der zur Programmierung des Mikrocomputers benötigten Rekursionsgleichung. Das nachstehende Berechnungsbeispiel aus einem Fachbuch zeigt einen digitalen PI-Regler, der durch eine Reihenschaltung von Halteglied, Reglerfunktion GR(s) und Abtaster approximiert wird.
Die gesuchte z-Übertragungsfunktion des digitalen Reglers D(z) besteht aus
dem Produkt von Halteglied  und Reglerfunktion GR(s):
und Reglerfunktion GR(s):

Berechnungsbeispiel eines PI-Reglers als Reihenschaltung von idealem Abtaster, PI-Regleralgorithmus und Halteglied.
-
Gegeben: s-Übertragungsfunktion eines PI-Reglers GR: Parameter des PI-Reglers mit folgenden Zahlenwerten:
- Verstärkung:
 ;
Zeitkonstante:
;
Zeitkonstante: ![T_N = 1{,}5[s]](/svg/157e09632dd12bb11e34ef801d8f9dd78d321b82.svg) ;
Abtastzeit:
;
Abtastzeit: ![T_A = 0{,}1[s]](/svg/e50fc2529fbcf26fd43d4c4325bf6dfc20590b17.svg) ;
;
Gesucht: z-Übertragungsfunktion und daraus die Differenzengleichung mit dem Regelalgorithmus des PI-Reglers:
Nach Anwendung der oben stehenden abgeleiteten Gleichung mit Eintrag der PI-Komponenten für
müssen die Komponenten des s-Bereichs in den z-Bereich transformiert
werden: Die Terme des s-Bereichs werden z-transformiert:
Damit lautet die z-Übertragungsfunktion des Reglers mit Zahlenwerten:
Diese z-Übertragungsfunktion wird in Operatorendarstellung nach U(z) geordnet und als Differenzengleichung
im Mikroprozessor programmiert. Durch Anwendung der Rechtsverschiebung um einen Abtastschritt "-1" ergibt sich für Rücktransformation in den diskreten Zeitbereich die Differenzengleichung
.
Diese Gleichung nach
 aufgelöst ergibt:
aufgelöst ergibt: In vereinfachter Schreibweise lautet die Differenzengleichung eines PI-Reglers für ein abgetastetes Regelsystem mit Halteglied bei TA = 0,1 [s]:
Zum Vergleich die errechnete Differenzengleichung für TA = 0,01 [s] zur besseren Annäherung an die analytische Funktion:











-
Tabelle zur grafischen Darstellung der Sprungantwort des PI-Reglers mit TA = 0,1 [s] und e(k) = 1,
im Vergleich mit einer direkten Anwendung von Differenzengleichungen nach Euler-Rückwärts.Folge k Zeit TA
[sec]Differenzengleichung aus z-Transformation
AusgangssignalDifferenzengleichung
Euler-Rückwärts
UntersummeDifferenzengleichung
Euler-Rückwärts
Obersumme 0 0 
2,0000 2,1333 1 0,1 
2,1333 2,2667 2 0,2 
2,2667 2,4000 3 0,3 
2,4000 2,5333 4 0,4 
2,5333 2,6667 5 0,5 
2,6667 2,8000 6 0,6 
2,8000 2,9333 10 1,0 3,3330 3,3330 3,4667 15 1,5 3,9995 4,0000 4,1333
Qualitativer Vergleich zwischen PI-Reglern mit Differenzengleichungen über die z-Transformation und Differenzengleichungen nach Euler-Rückwärts
- Schnittstelle des Rechenbeispiels:
- Das Fachbuch-Rechenbeispiel der Bestimmung der Differenzengleichung eines PI-Reglers über die z-Transformation ist offensichtlich als Untersumme definiert. Dieses Beispiel setzt ideale Schnittstellen mit einem Halteglied nullter Ordnung (entspricht einem Zeitschritt TA) und einen idealen Mikrorechner voraus.
- Differenzengleichungen als Funktion der Ober- und Untersumme:
- Die Grafik zeigt den Unterschied der Stellgröße für die Berechnungsmethoden der Differenzengleichungen nach der Ober- und Untersumme.
- Die grafische Darstellung der Sprungantwort des PI-Reglers laut der
Tabellen-Berechnungspunkte
entsprechen einer Rechteckfunktion, weil am Reglerausgang für die Wertefolge
ein Halteglied für den Zeitraum TA wirkt, das nach jedem
Rechenschritt gelöscht wird. Die errechneten Daten der Differenzengleichung
über die z-Transformation und die Daten nach den Differenzengleichungen
Euler-Rückwärts-Untersumme sind identisch.
- Sowohl die errechneten Ausgangsgrößen des Reglers der Differenzengleichung
als Wertefolgen
über die z-Übertragungsfunktion wie auch die errechneten Wertefolgen der
Ausgangsgrößen
nach den Differenzengleichungen der Methode Euler-Rückwärts (Untersumme und
Obersumme) entsprechen nur dann der analytischen Funktion der Sprungantwort
des PI-Reglers, wenn die Abtastzeit
 gegen Null geht.
gegen Null geht.
- Verwendung der Differenzengleichungen der Standardregler ohne z-Transformation möglich:
- Der Vergleich der Rechenergebnisse führt zu der Auffassung, dass für die Bestimmung der Differenzengleichungen der Standardregler die im Abschnitt Tabelle der Differenzengleichungen der Standardregler (Euler Rückwärts) aufgeführten Differenzengleichungen unmittelbar ohne z-Transformation verwendet werden können.
- Aus der Übertragungsfunktion des s-Bereiches wird deutlich, dass der PI-Regler in der Reihenstruktur aus einem I-Glied und einem PD1-Glied besteht.
- Übertragungsfunktion des PI-Reglers in der Parallelstruktur:

- Wird der Klammerausdruck der Gleichung auf einen gemeinsamen Nenner
gebracht, entsteht die Produktdarstellung in der Reihenstruktur:
- KPI = KP / TN ist die Verstärkung des PI-Reglers.

- Für die Berechnung des PI-Reglers werden zwei Differenzengleichungen 1.
Ordnung benötigt. Dabei ist wegen der empfohlenen Reihenschaltung die
Ausgangsgröße des I-Gliedes die Eingangsgröße des PD1-Gliedes. Die
Ausgangsgröße des PD-Gliedes im zeitdiskreten Bereich ist das Folgeglied zum
Zeitpunkt .
Die Eingangsgröße des PI-Reglers ist die normierte zeitdiskrete Sprungfunktion
 .
.
- Die Differenzengleichung eines PI-Reglers nach der Untersumme als Reihenschaltung von I-Glied und PD1-Glied lautet:

![{\text{PD-Glied:}}\quad u_{{(k)}}=e_{{1(k-1)}}+[e_{{1(k)}}-e_{{1(k-1)}}]\cdot {T_{N}}/{\Delta t}](/svg/cc4c1d832bfa48fd3d14967a23a20e8f54ff5cb4.svg)
Anmerkung zum PD-Glied: bedeutet wegen Untersumme: aktuelles
bedeutet wegen Untersumme: aktuelles  des I-Gliedes um einen Schritt (k-1) zurückgesetzt.
des I-Gliedes um einen Schritt (k-1) zurückgesetzt.
- Genauigkeit der Approximation des Regelalgorithmus des PI-Reglers:
- Die Güte der Approximation ist durch das Verhältnis der Abtastzeit
zur dominanten Zeitkonstante
des Reglers und der Regelstrecke bestimmt. Soll ein PD-Glied des PI-Reglers
ein PT1-Glied der Regelstrecke kompensieren, sollte dieses
Verhältnis 0,1 bis 0,01 betragen.
- Welche Genauigkeit des Regelvorgangs erreicht werden muss, hängt von der Vorgabe des Lastenheftes und von der Art der Regelstrecke ab.
- Reale Schnittstellen und reale Mikrorechner berücksichtigen:
- Bei schnellen Regelstrecken können die realen Schnittstellen des Reglers durch die signaltechnischen Verzögerungen als Ersatztotzeit berücksichtigt werden. Im Gegensatz zur Laplace-Transformation kann eine z-transformierte Übertragungsfunktion mit einer Totzeit im Rahmen der Rechenregeln der z-Transformation durch Rückwärtsverschiebung "Verschiebung nach rechts" um d = Tt / TA-Abtastschritte als komplette z-Übertragungsfunktion berechnet werden.
Einsatz von z-Transformation zur Bestimmung expliziter Formeln von Rekursionsvorschriften
Motivation
Die z-Transformation kann zur Bestimmung expliziter Formeln für Zahlenfolgen eingesetzt werden, die rekursiv definiert sind. Ein Paradebeispiel hierfür ist die Fibonacci-Zahlenfolge

Die Zahlenfolge ist rekursiv definiert und zwar mit der Rekursionsvorschrift

und dem Rekursionsanfang

Die rekursive Definition ist einfach, hat jedoch zum Nachteil, dass sie es
nicht erlaubt, das k-te Element der Zahlenfolge direkt zu bestimmen, ohne seine
 Vorgänger zu berechnen, was bei größer werdendem
immer zeitintensiver wird. Man fragt sich also, ob nicht auch eine explizite
Formel existiert, die eine direkte Bestimmung eines jeden Elements der
Zahlenfolge erlaubt. Für Fibonacci-Zahlen
existiert eine solche explizite Formel und sie lautet
Vorgänger zu berechnen, was bei größer werdendem
immer zeitintensiver wird. Man fragt sich also, ob nicht auch eine explizite
Formel existiert, die eine direkte Bestimmung eines jeden Elements der
Zahlenfolge erlaubt. Für Fibonacci-Zahlen
existiert eine solche explizite Formel und sie lautet
 .
.
Auf den ersten Blick scheint es unmöglich zu sein, dass diese Formel mit
 Termen überhaupt ganze Zahlen erzeugt, doch durch Einsetzen von
Termen überhaupt ganze Zahlen erzeugt, doch durch Einsetzen von  kann sich jeder selbst davon überzeugen, dass die Formel in der Tat die
entsprechenden Fibonacci-Zahlen liefert.
kann sich jeder selbst davon überzeugen, dass die Formel in der Tat die
entsprechenden Fibonacci-Zahlen liefert.
Doch wie kommt man nur auf eine solche Formel? Dazu gibt es verschiedenen Methoden und die z-Transformation ist eine davon. Im Folgenden wird eine Methodik gezeigt, wie man mit Hilfe von z-Transformation die explizite Formel einer rekursiven Berechnungsvorschrift bestimmen kann. Die allgemeinen Ausführungen werden am Beispiel der Fibonacci-Zahlen angewendet und verständlich gemacht.
Allgemeine Form der Rekursionsgleichung
Differenzengleichung und Rekursion
Eine Rekursionsformel vom Typ

kann als Beschreibung eines abgetasteten dynamischen Systems ohne Eingangssignal interpretiert werden, denn die weiter oben beschriebene Differenzengleichung
 .
.
geht direkt in die Rekursionsformel über, wenn man das Eingangssignal
zu Null setzt, d.h.  für alle
für alle  :
:

Das bedeutet, dass eine Rekursionsformel als eine Art Eigendynamik des
Systems betrachtet werden kann, wenn auf dieses keine äußeren Störungen
einwirken. Die Eigendynamik wird allerdings erst sichtbar, wenn das System aus
der Ruhelage ausgelenkt wird, und der genaue Verlauf der „Bewegung“ hängt von
den Anfangsbedingungen ab. Man setzt also voraus, dass das System bis zum
Zeitpunkt Null keinerlei Dynamik aufwies (d.h.  ),
doch die Anfangsbedingungen (Rekursionsanfang) müssen unbedingt berücksichtigt
werden.
),
doch die Anfangsbedingungen (Rekursionsanfang) müssen unbedingt berücksichtigt
werden.
Anfangsbedingungen und Rekursionsanfang
Um die Rekursionsformel mit Hilfe der z-Transformation lösen zu können, muss der Rekursionsanfang (also die Anfangsbedingung) in die Differenzengleichung eingefügt werden. Dies kann man mit Hilfe des zeitdiskreten Dirac-Impulses mit der Definition

umsetzen. Man platziert eine Reihe von
diskreten -Impulsen
an den ersten
Zeitpunkten

und wählt deren Amplituden  so, dass sich die gewünschten
Anfangswerte der Zahlenfolge ergeben. Die Anzahl der Anfangswerte muss
sein, damit die Rekursionsformel starten kann, denn
ist die Anzahl der Rekursionselemente auf der rechten Seite der
Rekursionsgleichung. Angabe weiterer Anfangswerte (mehr als )
ist überflüssig, weil diese Werte direkt aus der Rekursionsformel berechnet
werden.
so, dass sich die gewünschten
Anfangswerte der Zahlenfolge ergeben. Die Anzahl der Anfangswerte muss
sein, damit die Rekursionsformel starten kann, denn
ist die Anzahl der Rekursionselemente auf der rechten Seite der
Rekursionsgleichung. Angabe weiterer Anfangswerte (mehr als )
ist überflüssig, weil diese Werte direkt aus der Rekursionsformel berechnet
werden.
Unter Berücksichtigung dass  für alle negativen
angesetzt ist und der diskrete Dirac-Impuls
für alle negativen
angesetzt ist und der diskrete Dirac-Impuls  nur an der Stelle
nur an der Stelle  den Wert 1 hat und ansonsten 0 erhält man etwa für die ersten drei Elemente die
Beziehungen:
den Wert 1 hat und ansonsten 0 erhält man etwa für die ersten drei Elemente die
Beziehungen:

Sind diese drei Anfangswerte  und
und  als Rekursionsanfang bekannt, so kann man aus diesen Gleichungen direkt die
Amplituden
als Rekursionsanfang bekannt, so kann man aus diesen Gleichungen direkt die
Amplituden  und
und  bestimmen:
bestimmen:

-
Im Beispiel der Fibonacci-Zahlen gibt es zwei Anfangsbedingungen  und
und 
Die Differenzengleichung wird also mit
angesetzt. Das heißt, die beiden Koeffizienten
 und
und  sind beide 1, so dass man für die Amplituden der beiden Dirac-Impulse
die Werte
sind beide 1, so dass man für die Amplituden der beiden Dirac-Impulse
die Werte und damit die Differenzengleichung
erhält.



Lösung der Rekursionsgleichung mittels z-Transformation
Nun kann die gewonnene Differenzengleichung

mittels z-Transformation gelöst werden. Im ersten Schritt erhält man für die z-Transformierte den Ausdruck

in dem man die  -Terme
auf die linke Seite bringen
-Terme
auf die linke Seite bringen

und anschließend nach auflösen
kann:

bzw. durch Multiplikation mit
im Zähler und Nenner:

Im Allgemeinen erhält man also Polynome gleicher Ordnung im Nenner und im
Zähler. Das Zählerpolynom kann nie eine höhere Ordnung als das Nennerpolynom
besitzen, weil wie bereits erwähnt, lediglich
Anfangswerte vorgegeben werden so dass die Rekursion beginnen kann. Es kann
jedoch vorkommen, dass die Anfangsbedingungen zu Nullwerten bei manchen  Koeffizienten führen, so dass das Zählerpolynom eine kleinere Ordnung als
das Nennerpolynom besitzt. Mit diesen Überlegungen kann man also davon ausgehen,
dass eine Partialbruchzerlegung
möglich ist und die z-Transformierte in Form
Koeffizienten führen, so dass das Zählerpolynom eine kleinere Ordnung als
das Nennerpolynom besitzt. Mit diesen Überlegungen kann man also davon ausgehen,
dass eine Partialbruchzerlegung
möglich ist und die z-Transformierte in Form

geschrieben werden kann. Wegen der Beziehung

und der Rückwärtsverschiebung (nach rechts) der z-Transformation

erhält man also für die Rücktransformierte

und somit die explizite Formel für die einzelnen Elemente  der rekursiv definierten Zahlenfolge.
der rekursiv definierten Zahlenfolge.
-
Im Beispiel der Fibonacci-Zahlen mit der Differenzengleichung erhält man zunächst durch z-Transformation
und daraus
bzw. mit der Partialbruchzerlegung
Die Rücktransformation ergibt nun direkt die gesuchte explizite Form für die Fibonacci-Zahlenfolge:
Dass diese „krumme“ Formel tatsächlich ganzzahlige Ergebnisse liefert wird übrigens sofort klar, wenn man die Binomialausdrücke ausschreibt. Wegen des Minuszeichens heben sich die Terme mit geraden Exponenten von
auf während die Terme mit ungeraden Exponenten sich addieren und
mit dem -Term
im Nenner kürzen. Damit verbleiben lediglich gerade Exponenten von ,
d.h. Exponenten von 5. Man kann also die obige Gleichung auf mit
Fünfer-Potenzen gewichtete Binomialkoeffizienten und das Pascalsche
Dreieck zurückführen (siehe detaillierte Herleitung im Artikel Verwandtschaft
der Fibonacci-Zahlen mit dem Pascalschen Dreieck).




Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 04.07. 2021