Kontinuumsmechanik
Kontinuumsmechanik ist ein Teilgebiet der Mechanik, das die Bewegung von deformierbaren Körpern als Antwort auf äußere Belastungen studiert. Der Begriff Deformation wird hier so weit gefasst, dass auch das Fließen einer Flüssigkeit oder das Strömen eines Gases darunter fällt. Entsprechend gehören Festkörpermechanik, Strömungsmechanik und Gastheorie zur Kontinuumsmechanik. In der Kontinuumsmechanik wird vom mikroskopischen Aufbau der Materie, also zum Beispiel der Gitterstruktur kristalliner Festkörper und der molekularen Struktur von Flüssigkeiten, abgesehen und der Untersuchungsgegenstand als ein Kontinuum genähert. Die Größen Dichte, Temperatur und die drei Komponenten der Geschwindigkeit liegen an jedem Raumpunkt innerhalb eines Körpers vor, was die Kontinuumsmechanik zu einer Feldtheorie macht. Zu den nicht klassischen Theorien der Kontinuumsmechanik gehören die relativistische Kontinuumsmechanik, das Cosserat-Kontinuum, in dem jeder materielle Punkt zusätzlich drei Rotationsfreiheitsgrade besitzt oder die nicht lokalen Materialien.
Der theoretische Hintergrund der Kontinuumsmechanik liegt in der Physik, die praktische Anwendung erfolgt in verschiedenen Bereichen des Maschinenbaus, des theoretischen Bauingenieurwesens, der Werkstoffkunde, der Medizinischen Informatik sowie in der Geophysik und anderen Bereichen der Geowissenschaften. Insbesondere Anwendungen der beiden erstgenannten Bereiche werden als Technische Mechanik zusammengefasst.
Das im Bereich wissenschaftlich technischer Aufgabenstellungen der Festkörpermechanik bekannteste und am meisten angewandte numerische Berechnungsverfahren, die Finite-Elemente-Methode, löst die Gleichungen der Kontinuumsmechanik (näherungsweise) mit Methoden der Variationsrechnung. In der Strömungsmechanik kommt ein gleicher Rang dem Finite-Volumen-Verfahren zu.
Geschichte
Die Kontinuumsmechanik basiert auf der Mechanik, Physik, Differentialgeometrie, Differential- und Integralrechnung deren historischer Werdegang dort nachgeschlagen werden kann. Auch manche Etappen in der Entwicklung der Strömungsmechanik verlaufen mit der der Kontinuumsmechanik parallel. An dieser Stelle soll die spezifisch kontinuumsmechanische Entwicklung mit Betonung auf der Mechanik fester Körper skizziert werden.
Bereits Archimedes (287–212 v. Chr.) befasste sich mit grundlegenden mechanischen Fragestellungen, die Festkörper und Fluide betrafen, über 1500 Jahre bevor Leonardo da Vinci (1452–1519) Lösungen zahlreicher mechanischer Probleme ersann.
Galileo Galilei (1564–1642) diskutierte in seinen Discorsi Festigkeitsprobleme und begründete so die Festigkeitslehre in einer Zeit, als feste Körper zumeist als undeformierbar modelliert wurden. Edme Mariotte (1620–1684) lieferte Beiträge zu Problemen der Flüssigkeiten und Gase und stellte dabei erste Konstitutivgesetze auf, was Robert Hooke (1635–1703) mit dem nach ihm benannten Hooke’sche Gesetz 1676 auch für elastische Festkörper tat.
Isaac Newton (1643–1727) veröffentlichte 1686 seine Principia mit den Gravitations- und Bewegungsgesetzen. Die Mitglieder der Familie Bernoulli lieferten Beiträge zur Mathematik, Strömungsmechanik und – durch Jakob I Bernoulli (1654–1705) – zur Balkentheorie. Leonhard Euler (1707–1783) gab wesentliche Impulse zur Mechanik starrer und deformierbarer Körper sowie zur Hydromechanik. Jean-Baptiste le Rond d’Alembert (1717–1783) führte die eulersche Betrachtungsweise ein, leitete die lokale Massenbilanz her und formulierte das d’Alembertsche Prinzip. Joseph-Louis Lagrange (1736–1813) richtete 1788 in seinem grundlegenden Werk Mécanique analytique die Mechanik konsequent mathematisch aus.
Die in der Kontinuumsmechanik fundamentalen Begriffe des Spannungs- und Verzerrungstensors wurden von Augustin-Louis Cauchy (1789–1857) eingeführt. Weitere grundlegende Erkenntnisse wurden unter anderem von Siméon Denis Poisson (1781–1840), Claude Louis Marie Henri Navier (1785–1836), Gabrio Piola (1794–1850) und Gustav Robert Kirchhoff (1824–1887) eingebracht.
Aus industriellen und praktischen Bedürfnissen heraus dominierten im weiteren Verlauf technische Fragestellungen die Wissenschaft, die in Frankreich unter anderem in der von Cauchy, Poisson und Navier geprägten École polytechnique betrieben wurde. Deren Modell breitete sich in ganz Europa aus, in Deutschland als Technische Hochschule. Ingenieursdisziplinen wie Plastizitätstheorie, Kriechtheorie, Festigkeitslehre, Elastizitätstheorie und das Bauingenieurwesen entstanden. Als Folge dieser Aufsplitterung entwickelten sich Forschung und Lehre in den Teilgebieten unabhängig voneinander und gingen die kontinuumsmechanischen Zusammenhänge verloren. Auch die Strömungsmechanik entwickelte sich eigenständig.
Einen neuen Denkimpuls gab David Hilbert (1862–1943) mit seiner 1900 aufgestellten Liste von 23 mathematischen Problemen, die einer Lösung harren. Das sechste Problem „Wie kann die Physik axiomatisiert werden?“ ist zwar noch Anfang des 21. Jahrhunderts ungelöst, aber es entstanden noch vor dem Zweiten Weltkrieg fachübergreifende Arbeiten zur Kontinuumsmechanik insbesondere von Georg Hamel (1877–1954). Nach dem Krieg setzte eine intensive interdisziplinäre Grundlagenforschung ein, in der Clifford Truesdell (1919–2000) und Walter Noll (1925–2017) Impulse setzten.
Ab Mitte des 20. Jahrhunderts entwickelten sich die Computerhard- und software und die numerischen Verfahren zur Gleichungslösung so weit, dass mit ihrer Hilfe Lösungen für komplexe, praktische, kontinuumsmechanische Probleme gefunden werden können.
Überblick
Die Kontinuumsmechanik enthält zwei unterschiedliche Kategorien von Aussagen:
- allgemeine Aussagen, die für alle materiellen Körper gelten, und
- individuelle Aussagen, die Materialeigenschaften modellieren.
Die allgemeinen Aussagen beschreiben die Kinematik, hier die Geometrie der Deformation eines Körpers, und die Naturgesetze, die das physikalische Verhalten der Materie bestimmen.
Die individuellen Aussagen über die Materialeigenschaften werden in der Materialtheorie getroffen und schaffen die Verbindung zwischen den Naturgesetzen und den Deformationen von Körpern.
Die mathematische Beschreibung erlaubt die kompakte Formulierung der Naturgesetze in Bilanzgleichungen und der Materialeigenschaften in konstitutiven Gleichungen. Das System aus
- kinematischen Gleichungen,
- Bilanzgleichungen und
- konstitutiven Gleichungen
ist abgeschlossen und führt zur prinzipiellen Vorhersagbarkeit der Reaktion von Körpern auf äußere Einwirkungen.
Kinematik
In der Kontinuumsmechanik ist es die Aufgabe der Kinematik, ein Maß für die Verzerrungen eines Körpers in Abhängigkeit von seiner Bewegung – inklusive Deformationen – zu definieren. Die Bewegung kann dabei von einem festen Raumpunkt oder von einem Partikel des Körpers aus beobachtet werden. Ersteres ist die Eulersche Betrachtungsweise, die die Strömungsmechanik benutzt, und letzteres die Lagrangesche Betrachtungsweise, die in der Festkörpermechanik bevorzugt wird.
Nun ist plausibel, dass wenn sich zwei im undeformierten Ausgangszustand benachbarte Partikel eines Körpers stark unterschiedlich bewegen, der Körper dort auch stark deformiert wird. Werden nun die in drei Raumrichtungen messenden Positionsdifferenzen der Partikel im deformierten Körper in Beziehung gesetzt zu ihren drei Positionsdifferenzen im undeformierten Ausgangszustand, entsteht bei kleiner werdenden Abständen der Partikel der Deformationsgradient, der ein lokales Maß für die Deformation des Körpers ist. Der Deformationsgradient kann in eine Drehung und rotationsfreie Streckung zerlegt werden, aus der sich die gesuchten Verzerrungsmaße ableiten.

 durch einen Tensor T
durch einen Tensor TDer Deformationsgradient ist wie die Streckung und die Verzerrungsmaße ein Tensor zweiter Stufe. Diese Tensoren dienen hier der linearen Abbildung von geometrischen Vektoren, die im Allgemeinen dabei gedreht und gestreckt werden, siehe Abbildung rechts. Die Tensorrechnung kann nicht als allgemein bekannt vorausgesetzt werden, weshalb jedes Lehrbuch der Kontinuumsmechanik auch eine Einführung in die Tensorrechnung beinhaltet.
Naturgesetze
Bei der Übertragung des materiellen Körpers in einen mathematischen Raum wird der Körper homogenisiert, indem die auf Atome verteilte Materie durch ein Kontinuum ersetzt wird, was namensgebend für diese Wissenschaft ist. Durch diese Idealisierung erhält jeder Punkt des Körpers physikalische Eigenschaften wie Geschwindigkeit, Dichte und Temperatur.
Das zweite Newton’sche Gesetz beschreibt die Reaktion eines Körpers auf eine äußere Kraft. In der Realität und der Kontinuumsmechanik werden solche Kräfte immer flächig eingeleitet, die sich im Körper als Spannungen (mit der Dimension Kraft pro Fläche) fortpflanzen. Nun kann der Körper gedanklich zerschnitten werden, so dass sich an den Schnittflächen Schnittspannungen ausbilden, die jedoch von der Orientierung der Schnittflächen, d.h. ihren Normalenvektoren, abhängen. Nach dem Cauchy’schen Fundamentaltheorem stellen Spannungstensoren diese Abhängigkeit dar, indem sie die Normalen der Schnittflächen linear auf die Schnittspannungen abbilden. Der Spannungstensor ist grundlegend für die Formulierung der Naturgesetze in ihrer am materiellen Punkt gültigen Form.
Die Bilanzgleichungen der Mechanik beschreiben die Wirkung der Außenwelt auf einen Körper und die daraus resultierende Änderung physikalischer Größen. Diese Größen sind die Masse, der Impuls, der Drehimpuls und die Energie. Der zweite Hauptsatz der Thermodynamik wird in Form der Clausius-Duhem-Ungleichung berücksichtigt. Die in der Mechanik für ausgedehnte Körper formulierten Naturgesetze werden in der Kontinuumsmechanik als globale Integralgleichungen ausgedrückt, aus denen sich mit geeigneten Annahmen lokale Differentialgleichungen ableiten lassen, die an jedem Raumpunkt oder Partikel erfüllt sein müssen.
Die lokale Massenbilanz besagt, dass die Dichte am materiellen Punkt zeitlich konstant ist. Die lokale Impulsbilanz setzt die spezifische Impulsänderung in Beziehung zur spezifischen Schwerkraft und zum Antrieb durch einen Spannungsanstieg. Die Drehimpulsbilanz reduziert sich auf die Forderung nach der Symmetrie des Spannungstensors. Die Energiebilanz besagt, dass sich die innere Energie durch innere Wärmequellen, den spezifischen Wärmeeintrag und der spezifischen Spannungsleistung an Verzerrungsgeschwindigkeiten ändert. Bei isothermen Prozessen fordert die Clausius-Duhem-Ungleichung schließlich, dass die Produktion an Helmholtz’scher freier Energie die spezifische Spannungsleistung nicht überschreiten darf. Diese Bedingung ist weniger als Einschränkung physikalischer Prozesse, sondern vielmehr als Anforderung an Materialmodelle zu interpretieren: Es muss sichergestellt sein, dass die lokalen Formen der Clausius-Duhem-Ungleichung von den konstitutiven Gleichungen für beliebige Prozesse erfüllt werden.
Materialtheorie
Die mathematische Formulierung der Naturgesetze trifft keine Aussagen über die individuellen Eigenschaften der Körper – ob sie beispielsweise fest, flüssig oder gasförmig sind – und reicht daher nicht aus, die Bewegungen der Körper eindeutig zu bestimmen. Dazu bedarf es noch konstitutiver Gleichungen, die die materialspezifische Antwort des Körpers, z.B. auf eine äußere Kraft, beschreiben. In diesem Fall ist eine Beziehung zwischen den Deformationen des Körpers und den Reaktionskräften anzugeben. Die Materialtheorie beschäftigt sich mit diesen Beziehungen und wie sie in ein Materialmodell umgesetzt werden. Ziel eines Materialmodells ist es die wesentlichen Aspekte des Materialverhaltens zu beschreiben, wobei das was wesentlich ist, vom Beobachter festgelegt wird. Stoff- oder Materialgesetze, wie Materialmodelle manchmal genannt werden, haben nicht die allgemeine Gültigkeit physikalischer Gesetze.
Die klassische Kontinuumsmechanik betrachtet einfache Materialien, bei denen aus ihrer bisherigen Bewegung (Determinismus) das Verhalten an einem materiellen Punkt vollständig aus seiner Umgebung (Lokalität) bestimmt ist, und das unabhängig vom Bewegungszustand des Beobachters (Objektivität). Einfache Materialien sind also deterministisch, lokal und objektiv. Ihre Eigenschaften lassen sich mit materiellen Zwangsbedingungen, materiellen Symmetrien und konstitutiven Gleichungen wiedergegeben. Materielle Zwangsbedingungen schränken die Deformationsmöglichkeiten eines Materials ein, wie es z.B. die Inkompressibilität tut. Materielle Symmetrien beschreiben die Richtungsabhängigkeit des Materials, wie sie z.B. bei Holz gegeben ist. Die konstitutiven Gleichungen stellen schließlich eine Relation zwischen den Dehnungen und den Spannungen her.
Die sechs Materialmodelle der klassischen Materialtheorie sind das ideale Gas, das Newton’sche Fluid, das Hooke’sche Gesetz, die Viskoelastizität, Plastizität und Viskoplastizität. Aus den ersten drei Modellen leiten sich die Euler-Gleichungen, die Navier-Stokes-Gleichungen bzw. die Navier-Cauchy-Gleichungen ab.
Tensorrechnung
durch einen Tensor  .
.Wichtigstes mathematisches Hilfsmittel der Kontinuumsmechanik ist die Tensorrechnung, deren Kenntnis nicht allgemein vorausgesetzt werden kann. Hier sollen nur die im vorliegenden Artikel benutzten Rechenregeln kurz vorgestellt werden.
Die in der Kontinuumsmechanik meist benutzten Tensoren sind Tensoren zweiter Stufe, die geometrische Vektoren aus dem dreidimensionalen euklidischen Vektorraum linear aufeinander abbilden. Dabei werden die Vektoren im Allgemeinen gedreht und gestreckt, siehe Abbildung rechts. Für diese Tensoren gilt die komponentenweise Darstellung

mit Komponenten  des Tensors, die zu mit dem dyadischen
Produkt "
des Tensors, die zu mit dem dyadischen
Produkt " "
verknüpften Vektoren aus zwei Vektorraumbasen
"
verknüpften Vektoren aus zwei Vektorraumbasen
 bzw.
bzw.  des angenommenen Vektorraums gehören. Von verschiedenen Basen wird bei der
Beschreibung mit konvektiven
Koordinaten Gebrauch gemacht. Hier genügt es die Basen
und
mit der Standardbasis
des angenommenen Vektorraums gehören. Von verschiedenen Basen wird bei der
Beschreibung mit konvektiven
Koordinaten Gebrauch gemacht. Hier genügt es die Basen
und
mit der Standardbasis
 zu identifizieren, so dass jeder Tensor mit seiner Matrixrepräsentation
gleichgesetzt werden kann:
zu identifizieren, so dass jeder Tensor mit seiner Matrixrepräsentation
gleichgesetzt werden kann:

Gegeben sei ein weiterer Tensor  und ein Vektor
für die die komponentenweisen Darstellungen
und ein Vektor
für die die komponentenweisen Darstellungen

gelten. Die im Artikel verwendeten Operationen sind wie folgt definiert:
| Operator | Definition |
|---|---|
| Addition und Subtraktion | 
|
| Multiplikation mit einem Skalar x | 
|
| Tensorprodukt | 
|
| Transposition | 
|
Transformation eines Vektors mit dem Skalarprodukt
" "
von Vektoren "
von Vektoren |

|
| Invertierung | 
|
| Frobenius-Skalarprodukt | 
|
Darin ist  der Einheitstensor.
der Einheitstensor.
Des Weiteren wird die Fréchet-Ableitung
benötigt, die die Differentialrechnung
auf Vektoren und Tensoren verallgemeinert. Die Fréchet-Ableitung einer Funktion
 nach
nach  ist der beschränkte lineare Operator
ist der beschränkte lineare Operator  ,
der – sofern er existiert – in allen Richtungen
,
der – sofern er existiert – in allen Richtungen  dem Gâteaux-Differential
entspricht, also
dem Gâteaux-Differential
entspricht, also

gilt. Darin ist  und
skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch
und
skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch

geschrieben.
Kinematik
Hier sollen nur die spezifisch kontinuumsmechanischen Aspekte beschrieben werden, mehr ist im Hauptartikel nachzuschlagen. Die Kinematik gibt in der Kontinuumsmechanik Transformationsgleichungen für Größen in der Ausgangskonfiguration in die entsprechenden Größen in der Momentankonfiguration und leitet daraus Verzerrungsmaße ab.
Der materielle Körper
Der materielle Körper als Träger der physikalischen Prozesse erfüllt
gleichmäßig Teile des Raumes unserer Anschauung. In der Kontinuumsmechanik wird
der Körper mittels Konfigurationen
bijektiv
in einen euklidischen
Vektorraum  abgebildet, wobei die Eigenschaften des Körpers kontinuierlich über den Raum
verschmiert werden. Mithilfe dieser Idealisierung
wird der Körper als Punkt-Menge beschrieben, in der Gradienten und Integrale gebildet
werden können.
abgebildet, wobei die Eigenschaften des Körpers kontinuierlich über den Raum
verschmiert werden. Mithilfe dieser Idealisierung
wird der Körper als Punkt-Menge beschrieben, in der Gradienten und Integrale gebildet
werden können.
Daraus ergeben sich zwei Konsequenzen:
- Es gibt eine Größenskala, unterhalb derer die Aussagen der Kontinuumsmechanik ihre Gültigkeit verlieren. Diese Größenskala liegt oberhalb der Abmessungen des Repräsentativen-Volumen-Elementes (RVE), aus identischen Kopien von welchem der materielle Körper aufgebaut gedacht wird. Das RVE eines Kristalls kann beispielsweise eine Elementarzelle sein.
- Ein innerer Punkt des Körpers bleibt immer ein innerer Punkt, weswegen die Beschreibung der Ausbreitung von Rissen mit Aussagen der klassischen Kontinuumsmechanik nicht möglich ist. Mit der Reaktion von Körpern auf Risse und der Rissausbreitung beschäftigt sich die Bruchmechanik, die ihrerseits auf das Vorhandensein eines Risses angewiesen ist.
Für einen Körper werden folgende Konfigurationen benutzt:
- Die Referenz- oder Bezugskonfiguration
 ,
die der Identifikation der materiellen Punkte
,
die der Identifikation der materiellen Punkte  dient. Die Ausgangskonfiguration
dient. Die Ausgangskonfiguration  des Körpers zu einem gesetzten Zeitpunkt
des Körpers zu einem gesetzten Zeitpunkt  ist zeitlich fixiert und kann und soll als Referenzkonfiguration dienen. Weil
diese Position einmal vom Körper eingenommen wurde, liefert diese
Referenzkonfiguration ein Objekt unserer Anschauung.
ist zeitlich fixiert und kann und soll als Referenzkonfiguration dienen. Weil
diese Position einmal vom Körper eingenommen wurde, liefert diese
Referenzkonfiguration ein Objekt unserer Anschauung. - Die Momentankonfiguration
 bildet den deformierten Körper zur Zeit
bildet den deformierten Körper zur Zeit  ab.
ab.
Die Verknüpfung dieser Konfigurationen

heißt Bewegungsfunktion und soll so oft stetig
differenzierbar sein, wie es im jeweiligen Kontext notwendig ist. Der
Urbildraum  wird mit dem vom Körper in der Referenzkonfiguration eingenommenen Volumen
identifiziert und der Bildraum
wird mit dem vom Körper in der Referenzkonfiguration eingenommenen Volumen
identifiziert und der Bildraum  mit dem vom Körper in der Momentankonfiguration eingenommenen Volumen.
mit dem vom Körper in der Momentankonfiguration eingenommenen Volumen.
Materielle und räumliche Koordinaten
Die materiellen Koordinaten  eines materiellen Punktes
sind die Komponenten seines Ortsvektors in der Ausgangskonfiguration:
eines materiellen Punktes
sind die Komponenten seines Ortsvektors in der Ausgangskonfiguration:

Die Momentankonfiguration gibt zu jedem Zeitpunkt die räumlichen
Koordinaten  des materiellen Punktes
im Raum:
des materiellen Punktes
im Raum:

Die Bewegungsfunktion  beschreibt bei festgehaltenem
die Bahnlinie eines materiellen
Punktes durch den Raum. Wegen der Bijektivität kann die Bewegungsfunktion
jederzeit invertiert werden:
beschreibt bei festgehaltenem
die Bahnlinie eines materiellen
Punktes durch den Raum. Wegen der Bijektivität kann die Bewegungsfunktion
jederzeit invertiert werden:

Bei festgehaltenem Raumpunkt
liefert die Bewegungsfunktion  die Streichlinie durch den
Raumpunkt.
die Streichlinie durch den
Raumpunkt.
Wegen der Eineindeutigkeit
der Konfigurationen
bei der Beschreibung des materiellen Körpers können alle einem materiellen Punkt
zugeordneten Größen (z.B. Dichte, Temperatur und Geschwindigkeit) in
Abhängigkeit von seinen materiellen oder räumlichen Koordinaten beschrieben
werden. Wenn nicht anders angegeben, werden Größen in der materiellen
Betrachtungsweise mit Großbuchstaben oder dem Index  und solche der räumlichen mit Kleinbuchstaben bezeichnet.
und solche der räumlichen mit Kleinbuchstaben bezeichnet.
Lagrange’sche Betrachtungsweise
Soll die Bewegung eines materiellen Punktes beobachtet werden und welche physikalischen Bedingungen in ihm herrschen, liegt es nahe, die dem materiellen Punkt zugeordneten Größen in Abhängigkeit von den materiellen Koordinaten aufzuschreiben, denn diese sind für jeden materiellen Punkt konstant. So ergibt sich die materielle oder Lagrange’sche Betrachtungsweise (nach Joseph-Louis Lagrange), die in der Festkörpermechanik bevorzugt wird.
Euler’sche Betrachtungsweise
Sollen andererseits die physikalischen Prozesse an einem festen Raumpunkt verfolgt werden, liegt es nahe, die physikalischen Größen in Abhängigkeit von den räumlichen Koordinaten zu notieren. Das ist die räumliche oder Euler’sche Betrachtungsweise, die in der Strömungsmechanik benutzt wird.
Differentialoperatoren
In der Kontinuumsmechanik werden für die materielle und die räumliche Betrachtungsweise vor allem zwei Differentialoperatoren, für den Gradienten und die Divergenz, gebraucht:
| Feldvariable | Divergenz DIV | Gradient GRAD |
|---|---|---|
Skalarfeld 
|

| |
Vektorfeld 
|

|

|
Tensorfeld[1]

|

|
Die materiellen Operatoren DIV und GRAD beinhalten die materiellen
Ableitungen nach den materiellen Koordinaten.
Entsprechende Definitionen gelten für die räumlichen Operatoren div und
grad in der räumlichen Formulierung, die die räumlichen Ableitungen nach
den räumlichen Koordinaten
einschließen.
Lokale und materielle Zeitableitung
Die Zeitableitung einer einem materiellen Punkt zugeordneten Größe,
z.B. der Temperatur  ,
kann bei festgehaltenem Raumpunkt
oder festgehaltenem materiellen Punkt
ausgewertet werden. Ersteres ist die lokale Zeitableitung letzteres die
materielle oder substantielle
Ableitung. Weil sich die Naturgesetze auf materielle Punkte beziehen,
ist die substantielle Zeitableitung physikalisch bestimmend.
,
kann bei festgehaltenem Raumpunkt
oder festgehaltenem materiellen Punkt
ausgewertet werden. Ersteres ist die lokale Zeitableitung letzteres die
materielle oder substantielle
Ableitung. Weil sich die Naturgesetze auf materielle Punkte beziehen,
ist die substantielle Zeitableitung physikalisch bestimmend.
Die partielle
Ableitung  bei festgehaltenem Raumpunkt
ist die lokale Zeitableitung, d.h. die Änderungsrate die an einem festen
Raumpunkt vorliegt.
bei festgehaltenem Raumpunkt
ist die lokale Zeitableitung, d.h. die Änderungsrate die an einem festen
Raumpunkt vorliegt.
Die materielle Zeitableitung  ist in der Lagrange’schen Betrachtungsweise die partielle Ableitung nach der
Zeit
ist in der Lagrange’schen Betrachtungsweise die partielle Ableitung nach der
Zeit

und wird hier auch mit dem aufgesetzten Punkt gekennzeichnet.
Die materielle Zeitableitung ist also die an einem
Partikel
beobachtbare Änderungsrate einer Feldvariablen. In diesem Beispiel würde ein
Thermometer fortlaufend die Temperaturänderungen nur dieses einen Partikels
messen.
In der Euler’schen Betrachtungsweise setzt sich die materielle Zeitableitung aus dem lokalen und einem zusätzlichen konvektiven Anteil zusammen:

Die materiellen Koordinaten  gehören zu dem Partikel, das sich zur Zeit
am Ort
befindet und zu diesem Zeitpunkt die Geschwindigkeit
gehören zu dem Partikel, das sich zur Zeit
am Ort
befindet und zu diesem Zeitpunkt die Geschwindigkeit  besitzt, und
besitzt, und  stellt den konvektiven Anteil dar. Ganz
analog bildet sich die materielle Zeitableitung einer vektoriellen Größe,
beispielsweise die substantielle Beschleunigung:
stellt den konvektiven Anteil dar. Ganz
analog bildet sich die materielle Zeitableitung einer vektoriellen Größe,
beispielsweise die substantielle Beschleunigung:

Letztere Schreibweise mit dem Nabla-Operator
 wird in der Strömungsmechanik bevorzugt.
wird in der Strömungsmechanik bevorzugt.
Der Deformationsgradient
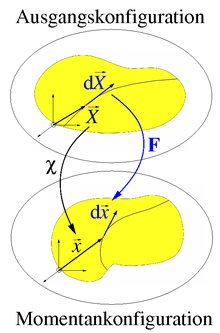
Der Deformationsgradient ist die grundlegende Größe zur Beschreibung von Verformungen, die sich aus lokalen Längenänderungen und von Winkeländerungen zwischen materiellen Linienelementen ergeben. Der Deformationsgradient transformiert die Tangentialvektoren an materielle Linien in der Ausgangskonfiguration in die Momentankonfiguration, siehe Bild. Berechnet wird der Deformationsgradient aus der Ableitung der Bewegungsfunktion nach den materiellen Koordinaten

und kann auch mit der Richtungsableitung

dargestellt werden, was seine Transformationseigenschaften der Linienelemente
 verdeutlicht.
verdeutlicht.
Der Deformationsgradient transformiert auch das Oberflächenelement
 ,
der mit dem Flächenstück
,
der mit dem Flächenstück  multiplizierten Normalen
multiplizierten Normalen  des Flächenstücks, und das Volumenelement
des Flächenstücks, und das Volumenelement
 von der Ausgangskonfiguration in die Momentankonfiguration:
von der Ausgangskonfiguration in die Momentankonfiguration:

Der Operator  gibt die Determinante
und
gibt die Determinante
und  die transponiert
Inverse. Mit diesen
Elementen können Integrale in der Ausgangs- und der Momentankonfiguration
(gleichbedeutend: in der materiellen und räumlichen Formulierung) ineinander
umgerechnet werden.
die transponiert
Inverse. Mit diesen
Elementen können Integrale in der Ausgangs- und der Momentankonfiguration
(gleichbedeutend: in der materiellen und räumlichen Formulierung) ineinander
umgerechnet werden.
Verzerrungstensoren

Mithilfe des Deformationsgradienten werden die Verzerrungsmaße definiert. Die
Polarzerlegung des
Deformationsgradienten  spaltet die Verformung lokal in eine reine Drehung, vermittelt durch den orthogonalen
Rotationstensor
spaltet die Verformung lokal in eine reine Drehung, vermittelt durch den orthogonalen
Rotationstensor  ,
und eine reine Streckung, vermittelt durch die symmetrischen positiv
definiten rechten bzw. linken Strecktensor
,
und eine reine Streckung, vermittelt durch die symmetrischen positiv
definiten rechten bzw. linken Strecktensor
 bzw.
bzw.  ,
siehe Bild. Der räumliche Tensor
wird hier groß geschrieben, um eine Verwechselung mit der Geschwindigkeit
zu vermeiden, die gelegentlich auch mit fetten Buchstaben geschrieben wird.
,
siehe Bild. Der räumliche Tensor
wird hier groß geschrieben, um eine Verwechselung mit der Geschwindigkeit
zu vermeiden, die gelegentlich auch mit fetten Buchstaben geschrieben wird.
Die Strecktensoren dienen der Definition einer Vielzahl von Verzerrungstensoren, z.B. der Biot-Dehnungen

die gelegentlich Nominaldehnungen genannt werden, der Hencky Dehnungen

(berechnet mittels Hauptachsentransformation
von ,
Bildung der Logarithmen
der Diagonalelemente und Rücktransformation), der Green-Lagrange’schen
Dehnungen

und Euler-Almansi-Dehnungen

Wie oben steht
für den Einheitstensor.
Letztere Dehnungstensoren sind aus dem Vergleich zweier materieller
Linienelemente
und  im Punkt
motiviert:
im Punkt
motiviert:

Verzerrungsgeschwindigkeiten
Aus der materiellen Zeitableitung
![{\displaystyle {\begin{array}{lclcl}{\dfrac {\mathrm {D} }{\mathrm {D} t}}(\mathrm {d} {\vec {x}}\cdot \mathrm {d} {\vec {y}}-\mathrm {d} {\vec {X}}\cdot \mathrm {d} {\vec {Y}})&=&{\dfrac {\mathrm {D} }{\mathrm {D} t}}[(\mathbf {F} \cdot \mathrm {d} {\vec {X}})\cdot (\mathbf {F} \cdot \mathrm {d} {\vec {Y}})]\\&=&({\dot {\mathbf {F} }}\cdot \mathrm {d} {\vec {X}})\cdot (\mathbf {F} \cdot \mathrm {d} {\vec {Y}})+(\mathbf {F} \cdot \mathrm {d} {\vec {X}})\cdot ({\dot {\mathbf {F} }}\cdot \mathrm {d} {\vec {Y}})&=:&2\mathrm {d} {\vec {X}}\cdot {\dot {\mathbf {E} }}\cdot \mathrm {d} {\vec {Y}}\\&=&({\dot {\mathbf {F} }}\cdot \mathbf {F} ^{-1}\cdot \mathrm {d} {\vec {x}})\cdot \mathrm {d} {\vec {y}}+\mathrm {d} {\vec {x}}\cdot ({\dot {\mathbf {F} }}\cdot \mathbf {F} ^{-1}\cdot \mathrm {d} {\vec {y}})&=:&2\mathrm {d} {\vec {x}}\cdot \mathbf {d} \cdot \mathrm {d} {\vec {y}}\end{array}}}](/svg/29188171ce53b233dd1ab0336c00e9b789af7a05.svg)
leiten sich der materielle Verzerrungsgeschwindigkeitstensor

und der räumliche

ab, die genau dann verschwinden, wenn Starrkörperbewegungen vorliegen.
Der räumliche Verzerrungsgeschwindigkeitstensor  ist der symmetrische Anteil des räumlichen Geschwindigkeitsgradienten
ist der symmetrische Anteil des räumlichen Geschwindigkeitsgradienten
 :
:

Geometrische Linearisierung

Die Gleichungen der Kontinuumsmechanik für Festkörper erfahren eine
erhebliche Vereinfachung, wenn kleine Verschiebungen angenommen werden können.
Verschiebungen sind die Differenz der Ortsvektoren  eines Partikels
in der Momentankonfiguration und seiner Ausgangslage :
eines Partikels
in der Momentankonfiguration und seiner Ausgangslage :

und der Verschiebungsgradient ist der Tensor
![{\displaystyle \mathbf {H} =\operatorname {GRAD} \;{\vec {u}}=\mathbf {F} -\mathbf {1} =\left({\begin{array}{ccc}{\frac {\partial u}{\partial X}}&{\frac {\partial u}{\partial Y}}&{\frac {\partial u}{\partial Z}}\\[1ex]{\frac {\partial v}{\partial X}}&{\frac {\partial v}{\partial Y}}&{\frac {\partial v}{\partial Z}}\\[1ex]{\frac {\partial w}{\partial X}}&{\frac {\partial w}{\partial Y}}&{\frac {\partial w}{\partial Z}}\end{array}}\right)\,.}](/svg/1613716056ac01926293092aab86bd1796276ee2.svg)
Wenn  eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl
eine charakteristische Abmessung des Körpers ist, dann wird bei kleinen
Verschiebungen sowohl  als auch
als auch  gefordert, so dass alle Terme, die höhere Potenzen von
gefordert, so dass alle Terme, die höhere Potenzen von  oder
oder  beinhalten, vernachlässigt werden können. Bei kleinen Verschiebungen ist eine
Unterscheidung der Lagrange’schen und Euler’schen Betrachtungsweise nicht mehr
nötig, so dass die räumlichen Koordinaten
und die materiellen
nicht mehr auseinandergehalten werden müssen. Dies führt zu
beinhalten, vernachlässigt werden können. Bei kleinen Verschiebungen ist eine
Unterscheidung der Lagrange’schen und Euler’schen Betrachtungsweise nicht mehr
nötig, so dass die räumlichen Koordinaten
und die materiellen
nicht mehr auseinandergehalten werden müssen. Dies führt zu

Das bedeutet, dass alle aufgeführten Verzerrungsmaße bei kleinen
Verschiebungen in den linearisierten
Verzerrungstensor  übergehen. Der linearisierte Verzerrungstensor
übergehen. Der linearisierte Verzerrungstensor
![{\displaystyle \boldsymbol{\varepsilon}
= \tfrac{1}{2}(\mathbf{H}+\mathbf{H}^\top)
= \left(\begin{array}{ccc}
\frac{\partial u}{\partial x} &
\frac{1}{2}\left(\frac{\partial u}{\partial y}
+ \frac{\partial v}{\partial x}\right) &
\frac{1}{2}\left(\frac{\partial u}{\partial z}
+ \frac{\partial w}{\partial x}\right)
\\[1ex]
\frac{1}{2}\left(\frac{\partial u}{\partial y}
+ \frac{\partial v}{\partial x}\right) &
\frac{\partial v}{\partial y} &
\frac{1}{2}\left(\frac{\partial v}{\partial z}
+ \frac{\partial w}{\partial y}\right)
\\[1ex]
\frac{1}{2}\left(\frac{\partial u}{\partial z}
+ \frac{\partial w}{\partial x}\right) &
\frac{1}{2}\left(\frac{\partial v}{\partial z}
+ \frac{\partial w}{\partial y}\right) &
\frac{\partial w}{\partial z}
\end{array}\right)
}](/svg/60329f340927f55993c0e08695ebbaac01986047.svg)
wird auch Ingenieursdehnung genannt, denn bei vielen Anwendungen im
technischen Bereich liegen kleine Dehnungen vor oder sie müssen aus
sicherheitstechnischen Gründen klein gehalten werden. Diese geometrisch lineare
Betrachtung ist für Werte  bis 3–8 % zulässig, siehe Bild. Liegen keine kleinen Verschiebungen vor,
wird von finiten oder großen Verschiebungen gesprochen.
bis 3–8 % zulässig, siehe Bild. Liegen keine kleinen Verschiebungen vor,
wird von finiten oder großen Verschiebungen gesprochen.
Manchmal wird für die geometrische Linearisierung nur
gefordert und
fallen gelassen, so dass große Translationen bei nur kleinen Drehungen und
Dehnungen erlaubt sind. Dann muss nach wie vor zwischen der Lagrange’schen und
Euler’schen Betrachtungsweise unterschieden werden.
Naturgesetze
Die in der Mechanik für ausgedehnte Körper formulierten Naturgesetze werden in der Kontinuumsmechanik als globale Integralgleichungen ausgedrückt, aus denen sich mit geeigneten Stetigkeitsannahmen lokale (Differential-)Gleichungen ableiten lassen, die an jedem materiellen Punkt erfüllt sein müssen. Mittels Äquivalenz-Umformungen der lokalen Gleichungen können anschließend weitere Prinzipien motiviert werden. Die globalen und lokalen Gleichungen können des Weiteren auf die räumlichen oder die materiellen Größen bezogen sein, so dass es für jedes Gesetz vier äquivalente Formulierungen gibt.
Die Bilanzgleichungen der Mechanik beschreiben die Wirkung der Außenwelt auf einen Körper und die daraus resultierende Änderung physikalischer Größen. Diese Größen sind die Masse, der Impuls, der Drehimpuls und die Energie. Neben den in der Mechanik bekannten äußeren Einflüssen gibt es im Kontinuum auch innere Quellen und Senken, z.B. ist die Schwerkraft eine innere Quelle für Spannungen. In abgeschlossenen Systemen, wo per definitionem eine Wechselwirkung mit der Außenwelt ausgeschlossen wird, werden aus den Bilanzgleichungen Erhaltungssätze. Der zweite Hauptsatz der Thermodynamik wird in Form der Clausius-Duhem-Ungleichung berücksichtigt.
Spannungstensoren

Grundlegend für die Formulierung der Bilanzgleichungen
ist der Begriff des Spannungstensors, der die Spannungen in Körpern auf Grund
äußerer Belastungen darstellt. Das zweite Newton’sche
Gesetz beschreibt die Reaktion eines Körpers auf eine äußere Kraft. In der Realität und der
Kontinuumsmechanik werden solche Kräfte immer flächig eingeleitet, d.h.
auf einem Teil der Oberfläche des Körpers wirken Spannungsvektoren  (Vektoren mit
der Dimension Kraft pro Fläche) ein die sich in den Körper als Spannungen
fortpflanzen. Nun kann der Körper gedanklich zerschnitten werden, so dass sich
an den Schnittflächen Schnittspannungen
ausbilden, die jedoch von der Orientierung der Schnittflächen, d.h. ihren
Normalenvektoren,
abhängen, siehe Abbildung rechts.
(Vektoren mit
der Dimension Kraft pro Fläche) ein die sich in den Körper als Spannungen
fortpflanzen. Nun kann der Körper gedanklich zerschnitten werden, so dass sich
an den Schnittflächen Schnittspannungen
ausbilden, die jedoch von der Orientierung der Schnittflächen, d.h. ihren
Normalenvektoren,
abhängen, siehe Abbildung rechts.
An einem freigeschnittenen (infinitesimal) kleinen Tetraeder sind die Volumenkräfte und die Impulsänderung als Terme dritter Ordnung gegenüber den oberflächig angreifenden Schnittspannungen, die Terme zweiter Ordnung in den Abmessungen des Tetraeders sind, vernachlässigbar klein. Aus dem Gleichgewicht am Tetraeder ergibt sich, dass der Zusammenhang zwischen der Normalen und den Spannungsvektoren linear sein muss, was der Inhalt des Cauchy’schen Fundamentaltheorems ist:

Der Cauchy’sche Spannungstensor  transformiert die Normale an die Schnittfläche
transformiert die Normale an die Schnittfläche  in den Spannungsvektor[4].
Bei der Übertragung dieses Zusammenhangs in die Lagrange’sche Betrachtungsweise
muss noch die Veränderung der Flächenelemente berücksichtigt werden:
in den Spannungsvektor[4].
Bei der Übertragung dieses Zusammenhangs in die Lagrange’sche Betrachtungsweise
muss noch die Veränderung der Flächenelemente berücksichtigt werden:

Der Spannungstensor  heißt Nominalspannungstensor und repräsentiert die Spannungen bezogen auf
die Ausgangsfläche. Die transponierte des Nominalspannungstensors ist der
erste Piola-Kirchhoff’sche Spannungstensor
heißt Nominalspannungstensor und repräsentiert die Spannungen bezogen auf
die Ausgangsfläche. Die transponierte des Nominalspannungstensors ist der
erste Piola-Kirchhoff’sche Spannungstensor

Später wird noch der zweite Piola-Kirchhoff’sche Spannungstensor

benötigt.
Bei kleinen Verzerrungen braucht nicht zwischen diesen Spannungstensoren unterschieden zu werden.
Massenbilanz
Sei  die Dichte in der räumlichen und
die Dichte in der räumlichen und  die in der materiellen Beschreibung. Unter der Annahme, dass es keine
Massenquellen irgendeiner Form gibt, bedeutet die Massenbilanz, dass die Masse
die in der materiellen Beschreibung. Unter der Annahme, dass es keine
Massenquellen irgendeiner Form gibt, bedeutet die Massenbilanz, dass die Masse
 eines Körpers
eines Körpers

zeitlich konstant ist:
| Lagrange’sche Betrachtungsweise | Euler’sche Betrachtungsweise | |
|---|---|---|
| globale Form | 
|

|
| lokale Form | 
|

|
Die lokalen Formen werden Kontinuitätsgleichung genannt. In der lokalen Euler’schen Formulierung wurde die Produktregel

und die materielle Zeitableitung  der Dichte eingesetzt.
der Dichte eingesetzt.
Impulsbilanz
Der Impulssatz besagt, dass die Änderung des Impulses gleich der von außen angreifenden Kräfte (volumenverteilt oder oberflächlich) ist:
| Lagrange’sche Betrachtungsweise | Euler’sche Betrachtungsweise | |
|---|---|---|
| globale Form | 
|

|
| lokale Form | 
|

|
Der Vektor  steht für eine Schwerebeschleunigung wie es die Schwerkraft eine ist, und
steht für eine Schwerebeschleunigung wie es die Schwerkraft eine ist, und
 sind Oberflächenspannungen auf der Oberfläche
sind Oberflächenspannungen auf der Oberfläche  bzw.
bzw.  des Körpers zur Zeit
des Körpers zur Zeit  bzw. .
bzw. .
Drehimpulsbilanz
Der Drehimpulssatz besagt, dass die Änderung des Drehimpulses gleich der von außen angreifenden Drehmomente (volumenverteilt oder oberflächlich) ist:
| Lagrange’sche Betrachtungsweise | 
|
|---|---|
| Euler’sche Betrachtungsweise | 
|
Das Rechenzeichen  bildet das Kreuzprodukt
und
bildet das Kreuzprodukt
und  ist ein beliebiger, zeitlich fixierter Ortsvektor.
ist ein beliebiger, zeitlich fixierter Ortsvektor.
Die lokalen Formen reduzieren sich auf die Forderung nach der Symmetrie des zweiten Piola-Kirchhoff’schen und des Cauchy’schen Spannungstensors:
| Lagrange’sche Betrachtungsweise | 
|
|---|---|
| Euler’sche Betrachtungsweise | 
|
Energiebilanz
Die thermomechanische Energiebilanz besagt, dass die Änderung der
Gesamtenergie eines Körpers gleich der Summe aus Wärmezufuhr und Leistung aller
äußeren Kräfte ist. Die Gesamtenergie setzt sich in der Lagrange’schen
Betrachtungsweise aus der inneren
Energie  mit der spezifischen inneren Energie
mit der spezifischen inneren Energie  und der kinetischen
Energie
und der kinetischen
Energie  zusammen:
zusammen:

Darin sind  innere Wärmequellen des Körpers,
innere Wärmequellen des Körpers,  der Wärmestrom pro Fläche und
die auf dem Oberflächenelement
des Körpers nach außen gerichtete Normale. Das negative Vorzeichen des
letztens Terms liefert eine Energiezufuhr, wenn der Wärmestrom in
den Körper gerichtet ist.
der Wärmestrom pro Fläche und
die auf dem Oberflächenelement
des Körpers nach außen gerichtete Normale. Das negative Vorzeichen des
letztens Terms liefert eine Energiezufuhr, wenn der Wärmestrom in
den Körper gerichtet ist.
In der Euler’schen Betrachtungsweise heißt die globale Energiebilanz:

Die lokalen Formen lauten:
| Lagrange’sche Betrachtungsweise | 
|
|---|---|
| Euler’sche Betrachtungsweise | 
|
Prinzip von d’Alembert in der Lagrange’schen Fassung
Das Prinzip von d’Alembert in der Lagrange’schen Fassung (d.h. in materieller Darstellung) hat eine grundlegende Bedeutung für die Lösung von Anfangsrandwertaufgaben der Kontinuumsmechanik, insbesondere der Verschiebungsmethode in der Finite-Elemente-Methode. Das Prinzip von d’Alembert in der Lagrange’schen Fassung ist eine zur lokalen Impulsbilanz (in materieller Darstellung) äquivalente Aussage über Arbeiten von im System auftretenden Kräften und Spannungen an virtuellen Verschiebungen bzw. virtuellen Verzerrungen.
Unter der Verschiebung
eines materiellen Punktes in
wird der Differenzvektor von seiner momentanen Lage
und seiner Ausgangslage
verstanden:  .
Virtuelle Verschiebungen
.
Virtuelle Verschiebungen  sind von
unabhängige, gedachte, weitgehend beliebige, differenzielle Verschiebungen, die
mit den geometrischen Bindungen des Körpers verträglich sind. Die virtuellen
Verschiebungen müssen verschwinden, wo immer Verschiebungsrandbedingungen des
Körpers vorgegeben sind. Sei
sind von
unabhängige, gedachte, weitgehend beliebige, differenzielle Verschiebungen, die
mit den geometrischen Bindungen des Körpers verträglich sind. Die virtuellen
Verschiebungen müssen verschwinden, wo immer Verschiebungsrandbedingungen des
Körpers vorgegeben sind. Sei  der Teil der Oberfläche
des Körpers, auf dem Verschiebungsrandbedingungen erklärt sind. Für ein
materielles Vektorfeld der virtuellen Verschiebungen
der Teil der Oberfläche
des Körpers, auf dem Verschiebungsrandbedingungen erklärt sind. Für ein
materielles Vektorfeld der virtuellen Verschiebungen  ist dann
ist dann

zu fordern. Auf
können dann keine Oberflächenspannungen vorgegeben werden. Deshalb bezeichnet
 den Teil der Oberfläche des Körpers, auf dem Oberflächenspannungen wirken
(können). Analog zu den auf den Verschiebungen
basierenden Verzerrungen entwickeln sich virtuelle Verzerrungen
den Teil der Oberfläche des Körpers, auf dem Oberflächenspannungen wirken
(können). Analog zu den auf den Verschiebungen
basierenden Verzerrungen entwickeln sich virtuelle Verzerrungen  aus den virtuellen Verschiebungen ,
weswegen diese mindestens einmal stetig differenzierbar sein sollen:
aus den virtuellen Verschiebungen ,
weswegen diese mindestens einmal stetig differenzierbar sein sollen:

Darin ist  der virtuelle Deformationsgradient.
der virtuelle Deformationsgradient.
Indem die lokale Impulsbilanz in der Lagrange’schen Formulierung skalar mit den virtuellen Verschiebungen multipliziert und das Ergebnis über das Volumen des Körpers integriert wird, entsteht

Die Menge  enthält alle zulässigen virtuellen Verschiebungen. Weil diese Gleichung für alle
möglichen virtuellen Verschiebungen
enthält alle zulässigen virtuellen Verschiebungen. Weil diese Gleichung für alle
möglichen virtuellen Verschiebungen  gilt, verschwindet das Volumenintegral stets nur genau dann, wenn der Term in
den Klammern überall verschwindet. Dies wird auch „schwache Formulierung“ der
Impulsbilanz genannt. Weitere Umformung der Integralgleichung durch Ausnutzung
des Cauchy’schen Fundamentaltheorems, des Gauß’schen
Integralsatzes, der Produktregeln
für die Divergenz und der Symmetrie des zweiten Piola-Kirchhoff
Spannungstensors führt auf das Prinzip von d’Alembert in der Lagrange’schen
Fassung
gilt, verschwindet das Volumenintegral stets nur genau dann, wenn der Term in
den Klammern überall verschwindet. Dies wird auch „schwache Formulierung“ der
Impulsbilanz genannt. Weitere Umformung der Integralgleichung durch Ausnutzung
des Cauchy’schen Fundamentaltheorems, des Gauß’schen
Integralsatzes, der Produktregeln
für die Divergenz und der Symmetrie des zweiten Piola-Kirchhoff
Spannungstensors führt auf das Prinzip von d’Alembert in der Lagrange’schen
Fassung

Auf der linken Seite steht die virtuelle Arbeit der Trägheitskräfte und die virtuelle Deformationsarbeit und auf der rechten Seite die virtuelle Arbeit der äußeren Kräfte (oberflächen- und volumenverteilt). Die genaue Herleitung ist in den Folgerungen aus den Cauchy-Euler’schen-Bewegungsgesetzen nachzuschlagen.
Clausius-Duhem-Ungleichung
Die Clausius-Duhem-Ungleichung folgt aus der Anwendung des zweiten
Hauptsatzes der Thermodynamik auf Festkörper. Mit den in quasi stationären
Prozessen gerechtfertigten Annahmen der Entropieproduktion  und des Entropieflusses
und des Entropieflusses  leitet sich mit der spezifischen Entropie
leitet sich mit der spezifischen Entropie  aus dem zweiten Hauptsatz der Thermodynamik die Clausius-Duhem-Ungleichung ab:
aus dem zweiten Hauptsatz der Thermodynamik die Clausius-Duhem-Ungleichung ab:
| Lagrange’sche Betrachtungsweise | Euler’sche Betrachtungsweise | |
|---|---|---|
| globale Form | 
|

|
| lokale Form | 
|

|
Hier ist wieder das negative Vorzeichen des letzten Terms in den globalen Formen der nach außen gerichteten Normalen geschuldet, siehe #Energiebilanz oben. Die Helmholtz’sche freie Energie:

ersetzt in den lokalen Formen die innere Energie. Im wichtigen Sonderfall, in dem Temperaturänderungen vernachlässigt werden können, vereinfachen sich die lokalen Formen zu:
| Lagrange’sche Betrachtungsweise | Euler’sche Betrachtungsweise | |
|---|---|---|
| lokale Form | 
|

|
Das Skalarprodukt der Spannungen mit den Verzerrungsgeschwindigkeiten ist die spezifische Spannungsleistung und derjenige Anteil von ihr, der über die Produktion an freier Energie hinaus geht, wird dissipiert. Die lokalen Formen der Clausius-Duhem-Ungleichung sind weniger als Einschränkung physikalischer Prozesse, sondern vielmehr als Anforderung an Materialmodelle zu interpretieren: Es muss sichergestellt sein, dass die lokalen Formen der Clausius-Duhem-Ungleichung von den konstitutiven Gleichungen für beliebige Prozesse erfüllt werden.
Materialtheorie
Die Materialtheorie beschäftigt sich mit den individuellen Merkmalen von Materialien und der Erstellung mathematischer Modelle hiervon. Ziel eines Materialmodells ist es, die wesentlichen Aspekte des Materialverhaltens zu beschreiben, wobei das was wesentlich ist, vom Beobachter festgelegt wird. Stoff- oder Materialgesetze, wie Materialmodelle manchmal genannt werden, haben nicht die allgemeine Gültigkeit physikalischer Gesetze. Zentral in der Materialmodellierung ist die Abhängigkeit der Spannungen von den Dehnungen (oder umgekehrt) in Form von Gleichungen zu beschreiben, so dass die Deformation von Körpern aus diesem Material berechnet werden kann. Die klassische Kontinuumsmechanik betrachtet einfache Materialien, deren Eigenschaften mit materiellen Zwangsbedingungen, materiellen Symmetrien und konstitutiven Gleichungen wiedergegeben werden.
Einfache Materialien
Die Materialtheorie der klassischen Kontinuumsmechanik setzt Determinismus, Lokalität und Objektivität des Materials voraus. Determinismus bedeutet, dass der aktuelle Zustand eines Körpers in einem seiner materiellen Punkte vollständig und eindeutig durch die vergangene Bewegung des Körpers bestimmt wird. Lokalität schränkt die Einflusssphäre der Außenwelt auf den aktuellen Spannungszustand in einem materiellen Punkt auf seine nahe Umgebung ein, Wirkungen pflanzen sich von einem materiellen Punkt zu seinen nächsten fort. Materielle Objektivität bedeutet, dass die Materialantwort vom Bezugssystem des Beobachters unabhängig ist, siehe Euklidische Transformation. Materialien, die diese drei Voraussetzungen erfüllen, heißen einfach. Bei einfachen Materialien vom Grad eins ergeben sich die Spannungen in einem materiellen Punkt aus den vergangenen Werten und dem aktuellen Wert des Green-Lagrange’schen Verzerrungstensors oder daraus ableitbaren Größen in diesem Punkt. Materialien höheren Grades benutzen auch höhere Ableitungen nach den materiellen Koordinaten als die ersten, die den Deformationsgradienten ausmachen.
Materielle Zwangsbedingungen
Materielle Zwangsbedingungen stellen kinematische Nebenbedingungen
dar, die die Deformationsmöglichkeiten eines Materials einschränken. Die
bekannteste dieser Bedingungen ist die Inkompressibilität, die dem Material nur
volumenerhaltende Verformungen erlauben, wie sie einige Flüssigkeiten
oder gummielastische
Materialien zeigen. Die kinematische Nebenbedingung lautet hier  .
Die Reaktionsspannungen im Material ergeben sich dann nicht mehr aus den
Konstitutivgleichungen, sondern aus den Bilanzgleichungen und Randbedingungen. Bei
Inkompressibilität z.B. ist die Reaktionsspannung der Druck im Material. Die
stärkste Nebenbedingung ist die, die den starren Körper auszeichnet. Hier
entfallen alle Konstitutivgleichungen und die Spannungen sind vollständig durch
die Naturgesetze und Randbedingungen bestimmt.
.
Die Reaktionsspannungen im Material ergeben sich dann nicht mehr aus den
Konstitutivgleichungen, sondern aus den Bilanzgleichungen und Randbedingungen. Bei
Inkompressibilität z.B. ist die Reaktionsspannung der Druck im Material. Die
stärkste Nebenbedingung ist die, die den starren Körper auszeichnet. Hier
entfallen alle Konstitutivgleichungen und die Spannungen sind vollständig durch
die Naturgesetze und Randbedingungen bestimmt.
Materielle Symmetrien
Materielle Symmetrien beschreiben welche Transformationen des Materials möglich sind, ohne dass sich bei gegebenem Deformationsgradient die Spannungen ändern. Diese Transformationen bilden die Symmetriegruppe des Materials. Sind alle volumenerhaltenden Transformationen erlaubt, liegt eine Flüssigkeit oder ein Gas vor. Bei Feststoffen sind nur Drehungen möglich: Bei isotropen Feststoffen sind alle Drehungen, bei transversal isotropen beliebige Drehungen um eine Achse, bei kubisch anisotropen nur 90-Grad-Drehungen um drei zueinander orthogonale Achsen, bei orthotropen nur 180-Grad-Drehungen um drei zueinander orthogonale Achsen und bei vollständig anisotropen sind nur "Drehungen" um 0 Grad erlaubt.
Konstitutive Gleichungen
Die konstitutiven Gleichungen geben eine Relation zwischen den Dehnungen und den Spannungen in Form von Integral-, Differential- oder algebraischen Gleichungen. Die folgenden Materialmodelle geben Beispiele für konstitutive Gleichungen.
- Ideales Gas: Beim idealen
Gas ist der Druck
 proportional zur Dichte
proportional zur Dichte  und Temperatur :
und Temperatur :
Die Zahl ist ein Materialparameter. Dieses Materialmodell führt in Verbindung mit der
Kontinuitätsgleichung und der Impulsbilanz auf die Euler-Gleichungen.
ist ein Materialparameter. Dieses Materialmodell führt in Verbindung mit der
Kontinuitätsgleichung und der Impulsbilanz auf die Euler-Gleichungen. - Linear viskoses oder newtonsches
Fluid:

Die Materialparameter und
und  sind die ersten und zweiten Lamé-Konstanten
und
sind die ersten und zweiten Lamé-Konstanten
und  die Spur.
Dieses Materialmodell liefert in Verbindung mit der Kontinuitätsgleichung und
der Impulsbilanz die Navier-Stokes-Gleichungen.
die Spur.
Dieses Materialmodell liefert in Verbindung mit der Kontinuitätsgleichung und
der Impulsbilanz die Navier-Stokes-Gleichungen. - Hookesches
Gesetz für linear elastische isotrope Festkörper:
 .
.
Es ist der Schubmodul,
der Schubmodul,  die Querkontraktionszahl.
Dieses Materialmodell ergibt in Verbindung mit der Impulsbilanz die Navier-Cauchy-Gleichungen.
die Querkontraktionszahl.
Dieses Materialmodell ergibt in Verbindung mit der Impulsbilanz die Navier-Cauchy-Gleichungen. - Viskoelastizität:
![{\boldsymbol {\sigma }}=2\int _{0}^{t}\gamma (t-\tau ){\boldsymbol {\varepsilon }}(\tau )'^{{\mathrm {D}}}\,{\mathrm {d}}\tau +\int _{0}^{t}\kappa (t-\tau )\operatorname {Sp}[{\boldsymbol {\varepsilon }}(\tau ){\text{'}}]\,{\mathrm {d}}\tau {\mathbf I}](/svg/6de3de182919f155b956e30baeb762926c9122c0.svg) .
.
Es bedeutet die Ableitung nach dem Zeitparameter
die Ableitung nach dem Zeitparameter  ,
,
 den Deviator und
den Deviator und  und
und  sind Relaxationsfunktionen für den Schub- bzw. den volumetrischen Anteil der
Deformation.
sind Relaxationsfunktionen für den Schub- bzw. den volumetrischen Anteil der
Deformation. - Plastizität: Bei der geschwindigkeitsunabhängigen Plastizität wird das Materialverhalten mit algebraischen und Differentialgleichungen beschrieben. Die algebraischen Gleichungen legen die additive Aufspaltung der Dehnungen in einen elastischen und einen plastischen Anteil, die Beziehung zwischen den Spannungen und den elastischen Dehnungen sowie die Fließfläche fest, die im Spannungsraum den elastischen Bereich vom plastischen Bereich trennt. Mit Differentialgleichungen wird die Entwicklung der inneren Variablen, z.B. der plastischen Dehnungen, beschrieben. In der klassischen Plastizität bleiben die Spannungen beim Fließen auf der Fließfläche.
- Viskoplastizität: Bei der geschwindigkeitsabhängigen Plastizität wird das Materialverhalten auch mit algebraischen und Differentialgleichungen dargestellt. Hier können die Spannungen jedoch zeitweilig außerhalb der Fließfläche liegen, kehren aber bei einer Relaxation auf diese zurück.
Die Feststoffmodelle drei bis sechs sind Repräsentanten der vier Gruppen von Modellen der klassischen Materialtheorie, die geschwindigkeitsabhängiges oder unabhängiges Verhalten mit oder ohne (Gleichgewichts-)Hysterese beschreiben.
Beispiel

Anhand der Dehnung eines verdrehten Klotzes unter reinem Zug (siehe Bild)
sollen die Gleichungen der Kontinuumsmechanik angewendet werden. Er habe in der
Ausgangskonfiguration im globalen kartesischen Koordinatensystem die Länge  in x-Richtung, die Breite
in x-Richtung, die Breite  in y-Richtung und Höhe
in y-Richtung und Höhe  in z-Richtung und sei im Ursprung parallel zu den Koordinatenachsen
ausgerichtet. Dieser Klotz werde langgezogen, wobei sich Streckungen
in z-Richtung und sei im Ursprung parallel zu den Koordinatenachsen
ausgerichtet. Dieser Klotz werde langgezogen, wobei sich Streckungen  in materieller X-, Y- bzw. Z-Richtung einstellen, und anschließend um 90° um die
z-Achse gedreht.
in materieller X-, Y- bzw. Z-Richtung einstellen, und anschließend um 90° um die
z-Achse gedreht.
In der Momentankonfiguration haben die materiellen Punkte
![{\displaystyle \vec{X}=(X,Y,Z)^\top \in [0,L]\times [0,B] \times [0,H]}](/svg/af186daf2ad45a3fa4253e538ab51688e7e3a91d.svg)
dann die räumlichen Koordinaten

Die materiellen Linien mit ![X \in [0,L]](/svg/5ce6ad49ed11491569dfa738e0f61a9b0c73fed9.svg) und
und  sind in der Momentankonfiguration also parallel zur y-Achse ausgerichtet. In der
Momentankonfiguration entspricht ein Zug in materieller x-Richtung einem Zug in
räumlicher y-Richtung.
sind in der Momentankonfiguration also parallel zur y-Achse ausgerichtet. In der
Momentankonfiguration entspricht ein Zug in materieller x-Richtung einem Zug in
räumlicher y-Richtung.
Der Deformations- und Verschiebungsgradient berechnen sich aus der Ableitung

Wegen der Drehung um 90° ergibt sich die polare Zerlegung

Daraus bekommt man die Verzerrungstensoren:

woran man sieht, dass bei großen Drehungen die geometrisch linearen Dehnungen
nicht benutzbar sind.
Unter Verwendung des Hooke’schen Gesetzes bei großen Deformationen ergeben sich die zweiten Piola Kirchhoff Spannungen im Lagrange’schen Bild:
![{\displaystyle {\tilde {\mathbf {T} }}=2G\left[\mathbf {E} +{\frac {\nu }{1-2\nu }}\operatorname {Sp} (\mathbf {E} )\mathbf {1} \right]=2G\left[{\frac {1}{2}}{\begin{pmatrix}\lambda ^{2}-1&0&0\\0&{\beta }^{2}-1&0\\0&0&{\eta }^{2}-1\end{pmatrix}}+{\frac {\nu (\lambda ^{2}+\beta ^{2}+\eta ^{2}-3)}{2(1-2\nu )}}{\begin{pmatrix}1&0&0\\0&1&0\\0&0&1\end{pmatrix}}\right]\,.}](/svg/96c7e341a2f8eda2f4ecf73b1fc15910de74ac8d.svg)
Bei reinem Zug in materieller x-Richtung mittels  erkennt man
erkennt man  und daher
und daher

worin  der Elastizitätsmodul
ist. Der Nominalspannungstensor lautet
der Elastizitätsmodul
ist. Der Nominalspannungstensor lautet
 mit
mit 
In der hier betrachteten Statik besagt der Impulssatz

was wegen  gegeben ist. Der Cauchy’sche Spannungstensor bekommt die Form:
gegeben ist. Der Cauchy’sche Spannungstensor bekommt die Form:

Drückt man den Klotz auf null Länge zusammen, so dass  ist, verschwinden diese Spannungen. Dies zeigt, dass das Hooke’sche Gesetz bei
derart großen Verformungen nicht anwendbar ist. Das Hooke’sche Gesetz ergibt nur
bei moderaten Dehnungen physikalisch plausible Antworten.
ist, verschwinden diese Spannungen. Dies zeigt, dass das Hooke’sche Gesetz bei
derart großen Verformungen nicht anwendbar ist. Das Hooke’sche Gesetz ergibt nur
bei moderaten Dehnungen physikalisch plausible Antworten.
Als Referenzkonfiguration  eignet sich der Einheitswürfel
eignet sich der Einheitswürfel
![(\Theta _{1},\Theta _{2},\Theta _{3})\in {[-1,1]}^{3}\subset {\mathbb {V}}^{3}\,.](/svg/50f7dcfc0d28a95f15b6ecd94a5c0d7f408747ca.svg)
So bekommen die materiellen Punkte in der Ausgangskonfiguration  die Koordinaten
die Koordinaten

Der zwischen der Referenz- und der Ausgangskonfiguration operierende "Deformationsgradient" wird auch als Jacobi-Matrix bezeichnet:

Das Volumenintegral einer Feldgröße
lautet dann

und kann in dieser Form numerisch mit der Gauß-Quadratur berechnet werden.
Siehe auch
- Technische Mechanik, Rheologie
- Cauchy-Elastizität, Hyperelastizität,
- Orthotropie Kubische Anisotropie
- Hauptinvariante
- Spannungsfunktion, Airysche Spannungsfunktion
- Kompatibilitätsbedingung
- Orthogonaler Tensor, Deviator, Kugeltensor
Fußnoten
- ↑ In der Literatur wird auch eine andere Definition benutzt, die sich allein durch die Transposition des Tensors von der hiesigen unterscheidet. Die Formeln erhalten in der Formulierung zumeist nur geringfügige Modifikationen und können geradewegs ineinander überführt werden.
- ↑
Die Transposition des Spannungstensors stellt
sicher, dass in seinen Komponenten
 der erste Index auf die Schnittflächennormale hinweist und der zweite Index
die Wirkrichtung anzeigt.
der erste Index auf die Schnittflächennormale hinweist und der zweite Index
die Wirkrichtung anzeigt.
Literatur
- H. Altenbach: Kontinuumsmechanik. Springer Verlag, 2012, ISBN 978-3-642-24118-5.
- H. Parisch: Festkörper Kontinuumsmechanik. Teubner, 2003, ISBN 3-519-00434-8.
- Ernst Becker & Wolfgang Bürger: Kontinuumsmechanik. Teubner, 1975, ISBN 3-519-02319-9.
- Arnold Sommerfeld: Mechanik der deformierbaren Medien. (= Vorlesungen über theoretische Physik, Band 2). Becker & Erler, Leipzig 1945. (6. Auflage, Harri Deutsch, Thun 1992, ISBN 3-87144-375-1.)


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 05.06. 2026