Differenzierbarkeit
Als Differenzierbarkeit bezeichnet man in der Mathematik die Eigenschaft einer Funktion, sich lokal um einen Punkt in eindeutiger Weise linear approximieren zu lassen. Der Begriff Differenzierbarkeit ist nicht nur für reellwertige Funktionen auf der Menge der reellen Zahlen erklärt, sondern auch für Funktionen mehrerer Variablen, für komplexe Funktionen, für Abbildungen zwischen reellen oder komplexen Vektorräumen und für viele andere Typen von Funktionen und Abbildungen. Für manche Typen von Funktionen (zum Beispiel für Funktionen mehrerer Variablen) gibt es mehrere verschiedene Differenzierbarkeitsbegriffe.
Die Frage nach der Differenzierbarkeit gehört zu den Problemstellungen der Differentialrechnung, eines Teilgebiets der Analysis.
Reellwertige Funktionen einer reellen Veränderlichen
Definitionen
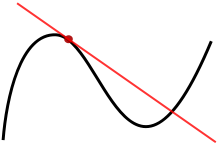
Rot: Graph der linearen Funktion g, die f in der Nähe der Stelle x0 approximiert
Im einfachsten Fall betrachtet man eine reellwertige Funktion einer reellen
Variablen,
also eine Funktion  ,
deren Funktionswerte reelle
Zahlen sind und deren Definitionsbereich
,
deren Funktionswerte reelle
Zahlen sind und deren Definitionsbereich
 ein offenes Intervall
reeller Zahlen ist. Eine solche Funktion
ein offenes Intervall
reeller Zahlen ist. Eine solche Funktion  ist differenzierbar an einer Stelle
ist differenzierbar an einer Stelle  aus ihrem Definitionsbereich, wenn die Ableitung
von
an dieser Stelle existiert. Es gibt im Wesentlichen zwei äquivalente
Definitionen für die Existenz der Ableitung:
aus ihrem Definitionsbereich, wenn die Ableitung
von
an dieser Stelle existiert. Es gibt im Wesentlichen zwei äquivalente
Definitionen für die Existenz der Ableitung:
- 1. Definition
- Eine Funktion
ist genau dann differenzierbar an der Stelle
ihres Definitionsbereichs, wenn der beidseitige Grenzwert der Differenzenquotienten
- existiert. Diesen Grenzwert bezeichnet man als die Ableitung von
an der Stelle ,
geschrieben
 .
.

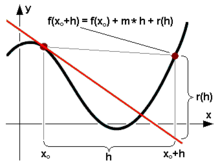
- 2. Definition
- Eine Funktion
ist genau dann differenzierbar an der Stelle
ihres Definitionsbereichs, wenn eine reelle Zahl
 (die von
abhängen darf) und eine (ebenfalls von
abhängige) Funktion
(die von
abhängen darf) und eine (ebenfalls von
abhängige) Funktion  (Fehler der Approximation) mit folgenden Eigenschaften existieren:
(Fehler der Approximation) mit folgenden Eigenschaften existieren:

- Für
 geht
geht  schneller als linear gegen 0, das heißt:
schneller als linear gegen 0, das heißt:
-
 für
für
- Die Funktion
lässt sich also in der Nähe von
durch eine lineare Funktion
 mit
mit
- bis auf den Fehler
approximieren. Den Wert
bezeichnet man als die Ableitung von
an der Stelle .
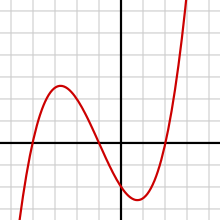
- Differenzierbare Funktionen sind damit genau diejenigen Funktionen, die sich lokal durch lineare Funktionen approximieren lassen (siehe Abbildung).

Beide Definitionen sind äquivalent: Ist
differenzierbar nach der 1. Definition, so wählt man für
den Grenzwert aus der Definition und setzt

Dann ist die erste Eigenschaft nach Wahl von
und
erfüllt und die zweite wegen

Ist umgekehrt die 2. Definition erfüllt, so erhält man durch Umformen der ersten Eigenschaft die Gleichung

und der Grenzwert der Differenzenquotienten existiert dann wegen

Eine Funktion heißt genau dann differenzierbar (ohne Einschränkung auf
einen speziellen Punkt), wenn sie an jeder Stelle ihres
Definitionsbereichs differenzierbar ist. Die Funktion  heißt dann Ableitungsfunktion oder kurz Ableitung von .
heißt dann Ableitungsfunktion oder kurz Ableitung von .
 an der Stelle x0
an der Stelle x0
Es seien  .
Dann ist
.
Dann ist
 .
.
auf ganz  differenzierbar und die Ableitung ist
differenzierbar und die Ableitung ist  .
.Erläuterungen
Grafisch lässt sich die Eigenschaft Differenzierbarkeit so deuten, dass eine
Funktion genau dann an der Stelle
differenzierbar ist, wenn im zugehörigen Punkt  des Graphen von
genau eine Tangente existiert, die nicht
senkrecht verläuft. Die Tangente ist der Graph der in der 2. Definition
genannten linearen Funktion .
des Graphen von
genau eine Tangente existiert, die nicht
senkrecht verläuft. Die Tangente ist der Graph der in der 2. Definition
genannten linearen Funktion .
Die Ableitung von
an der Stelle
ist die Steigung dieser Tangente. Die in der ersten Definition genannten
Differenzenquotienten sind die Steigungen von Sekanten durch den Punkt
und einen anderen Kurvenpunkt  .
Die Funktion
ist also an der Stelle
differenzierbar, wenn die Steigungen dieser Sekanten beim Grenzübergang
.
Die Funktion
ist also an der Stelle
differenzierbar, wenn die Steigungen dieser Sekanten beim Grenzübergang  gegen die Steigung der Tangente konvergieren.
gegen die Steigung der Tangente konvergieren.
Aus Differenzierbarkeit folgt Stetigkeit: Jede an einer Stelle differenzierbare Funktion ist dort auch stetig. Jede auf ihrem Definitionsbereich differenzierbare Funktion ist stetig. Die Umkehrung gilt nicht. Die unten angeführten nicht differenzierbaren Funktionen sind alle stetig.
Beispiele für differenzierbare Funktionen
Aus den Ableitungsregeln folgt:
- Jede Funktion, die sich durch ein Polynom darstellen lässt, ist differenzierbar.
- Summen, Produkte und Quotienten von differenzierbaren Funktionen sind differenzierbar.
- Verkettungen von differenzierbaren Funktionen sind differenzierbar.
- Die Umkehrfunktion
 einer bijektiven differenzierbaren Funktion
ist genau dann an der Stelle
einer bijektiven differenzierbaren Funktion
ist genau dann an der Stelle  differenzierbar, wenn
differenzierbar, wenn  ist.
ist.
Aus den Grenzwertsätzen für Potenzreihen folgt:
- Jede Funktion, die lokal durch eine Potenzreihe dargestellt werden kann, ist differenzierbar.
Beispiele für nicht differenzierbare Funktionen
Da jede differenzierbare Funktion stetig ist, ist umgekehrt jede unstetige Funktion (zum Beispiel eine Treppenfunktion oder die Dirichlet-Funktion) ein Beispiel für eine nicht differenzierbare Funktion. Es gibt aber auch Funktionen, die zwar stetig sind, aber nicht oder nicht überall differenzierbar.
Wurzelfunktion
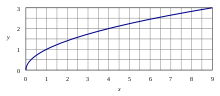
Die Wurzelfunktion
 ,
,
 ist an der Stelle
ist an der Stelle  nicht differenzierbar. Der Differenzenquotient
nicht differenzierbar. Der Differenzenquotient

strebt für  gegen unendlich, konvergiert also nicht. Der Graph der Funktion hat an der
Stelle
eine Tangente, diese verläuft aber vertikal und besitzt deshalb keine Steigung.
gegen unendlich, konvergiert also nicht. Der Graph der Funktion hat an der
Stelle
eine Tangente, diese verläuft aber vertikal und besitzt deshalb keine Steigung.
Betragsfunktion
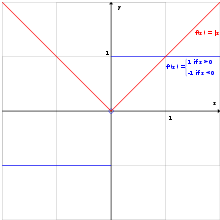

Die Betragsfunktion
ist an der Stelle  nicht differenzierbar.
nicht differenzierbar.
Für  ist
ist  und damit
und damit
 .
.
Für  ist dagegen
ist dagegen  und folglich
und folglich
 .
.
Da der links-
und der rechtsseitige
Grenzwert nicht übereinstimmen, existiert der Grenzwert nicht. Die Funktion
ist somit an der betrachteten Stelle nicht differenzierbar.
Es existieren an der Stelle
jedoch die rechtsseitige Ableitung

und die linksseitige Ableitung
 .
.
Der Funktionsgraph hat an der Stelle
einen Knick. Es gibt sozusagen eine linksseitige Tangente mit Steigung  und eine rechtsseitige mit Steigung
und eine rechtsseitige mit Steigung  .
Zu jeder Steigung zwischen
und
gibt es eine Gerade, die den Funktionsgraph im Punkt
.
Zu jeder Steigung zwischen
und
gibt es eine Gerade, die den Funktionsgraph im Punkt  „berührt“, aber sich nicht „anschmiegt“.
„berührt“, aber sich nicht „anschmiegt“.
Dies ist ein typisches Verhalten für abschnittsweise definierte Funktionen, wo an den Nahtstellen zwar die Funktionswerte zusammenpassen, aber nicht die Ableitungen. Die Graphen von differenzierbaren Funktionen haben demgegenüber keine Knicke.
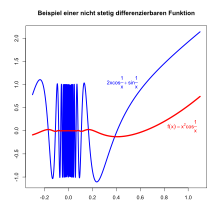
Ein drittes Beispiel
.svg.png) mit
mit  für
für  und
und  .
.Die Funktion

ist an der Stelle 0 stetig, aber nicht differenzierbar (aber überall sonst). Für den Differenzenquotient an der Stelle 0 gilt

Der Limes für
existiert nicht. Es existieren auch keine einseitigen Grenzwerte. Vielmehr
pendelt der Differenzenquotient, wenn  gegen 0 geht, unendlich oft zwischen den Werten −1 und 1 und nimmt dabei jeden
Zwischenwert unendlich oft an.
gegen 0 geht, unendlich oft zwischen den Werten −1 und 1 und nimmt dabei jeden
Zwischenwert unendlich oft an.
Weierstraß-Funktion
![[-2,2]](/svg/f94b820404eca2a458cb2c7d8c24be85fffccf90.svg) .
Sie ist stetig, aber nirgends differenzierbar.
.
Sie ist stetig, aber nirgends differenzierbar.Die nach ihrem Entdecker benannte Weierstraß-Funktion

ist überall stetig, aber nirgends differenzierbar.
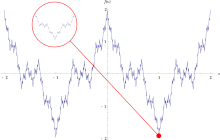
Wiener-Prozess
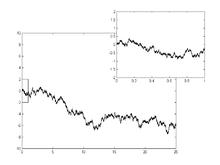
Weitere Beispiele liefert die mathematische Brownsche Bewegung: Fast
jeder Pfad
eines Wiener-Prozesses
ist als Funktion  stetig, aber nirgends differenzierbar.
stetig, aber nirgends differenzierbar.
Stetige Differenzierbarkeit und höhere Ableitungen
.svg.png)
 mit
mit  für
und
ist differenzierbar, aber nicht stetig differenzierbar
für
und
ist differenzierbar, aber nicht stetig differenzierbarEine Funktion heißt stetig differenzierbar, wenn sie differenzierbar ist und ihre Ableitung stetig ist. Selbst wenn eine Funktion überall differenzierbar ist, muss die Ableitung nicht stetig sein. Zum Beispiel ist die Funktion

an jeder Stelle, inklusive  ,
differenzierbar, weil
,
differenzierbar, weil

Die Ableitung

ist aber an der Stelle 0 nicht stetig.
Eine Funktion
heißt zweimal differenzierbar, wenn ihre Ableitungsfunktion  differenzierbar ist. Entsprechend wird dreimal, viermal, …,
differenzierbar ist. Entsprechend wird dreimal, viermal, …,  -mal
differenzierbar definiert. Die höheren Ableitungen werden mit
-mal
differenzierbar definiert. Die höheren Ableitungen werden mit  ,
,
 ,
,
 ,
…,
,
…,  bezeichnet.
bezeichnet.
Da aus der Differenzierbarkeit einer Funktion die Stetigkeit folgt, sind bei
einer zweimal differenzierbaren Funktion die Funktion
selbst und die erste Ableitung
automatisch stetig. Die zweite Ableitung
braucht jedoch nicht stetig zu sein. Entsprechend sind bei einer -mal
differenzierbaren Funktion die Funktion selbst und alle Ableitungen ,
,
… bis zur  -ten
Ableitung
-ten
Ableitung  stetig. Für die -te
Ableitung
braucht dies jedoch nicht zu gelten. Ist diese auch stetig, so nennt man
-mal
stetig differenzierbar. Sind alle Ableitungen wieder differenzierbar, so
nennt man die Funktion unendlich oft differenzierbar oder glatt.
stetig. Für die -te
Ableitung
braucht dies jedoch nicht zu gelten. Ist diese auch stetig, so nennt man
-mal
stetig differenzierbar. Sind alle Ableitungen wieder differenzierbar, so
nennt man die Funktion unendlich oft differenzierbar oder glatt.
Die Menge aller -mal
stetig differenzierbaren Funktionen mit der Definitionsmenge
 bezeichnet man als
bezeichnet man als  .
Die Menge der unendlich oft differenzierbaren Funktionen heißt
.
Die Menge der unendlich oft differenzierbaren Funktionen heißt  .
Eine -mal
stetig differenzierbare Funktion nennt man daher auch Funktion der Differentiationsklasse
.
Eine -mal
stetig differenzierbare Funktion nennt man daher auch Funktion der Differentiationsklasse
 ,
kurz: Funktion der Klasse
oder -Funktion.
Eine unendlich oft differenzierbare Funktion heißt entsprechend Funktion der
(Differentiations-)Klasse
,
kurz: Funktion der Klasse
oder -Funktion.
Eine unendlich oft differenzierbare Funktion heißt entsprechend Funktion der
(Differentiations-)Klasse  oder -Funktion.
oder -Funktion.
Die Funktion

ist differenzierbar, ihre Ableitung ist die Funktion  ,
die stetig, aber an der Stelle 0 nicht differenzierbar ist. Die Funktion
ist also stetig differenzierbar, aber an der Stelle 0 nicht zweimal
differenzierbar. Entsprechend ist die Funktion
,
die stetig, aber an der Stelle 0 nicht differenzierbar ist. Die Funktion
ist also stetig differenzierbar, aber an der Stelle 0 nicht zweimal
differenzierbar. Entsprechend ist die Funktion

-mal
stetig differenzierbar, aber an der Stelle 0 nicht -mal
differenzierbar.
Komplexe Funktionen
Für komplexe
Funktionen, also komplexwertige
Funktionen einer komplexen Variablen, definiert man Differenzierbarkeit ganz
analog zu reellen Funktionen. Es sei  eine offene Teilmenge der komplexen Ebene und
eine offene Teilmenge der komplexen Ebene und  ein Punkt dieser Teilmenge. Eine Funktion
ein Punkt dieser Teilmenge. Eine Funktion  heißt komplex differenzierbar im Punkt
heißt komplex differenzierbar im Punkt  ,
falls der Grenzwert
,
falls der Grenzwert

existiert.
In diesem Fall bezeichnet man diesen Grenzwert als  .
.
Eine Funktion
heißt holomorph im Punkt ,
falls eine Umgebung von
existiert, in der
komplex differenzierbar ist. Holomorphe Funktionen sind automatisch unendlich
oft komplex differenzierbar und sogar analytisch.
Reellwertige Funktionen mehrerer Variablen
Für Funktionen mehrerer Veränderlicher, also Funktionen, die auf offenen
Teilmengen des euklidischen
Raums definiert sind, gibt es mehrere verschieden starke Begriffe der
Differenzierbarkeit. Im Folgenden sei  eine offene Menge. Die Elemente des
eine offene Menge. Die Elemente des  können als
können als  -Tupel
-Tupel
 geschrieben werden. Weiter sei eine Funktion
geschrieben werden. Weiter sei eine Funktion  gegeben. Wir betrachten einen festen Punkt
gegeben. Wir betrachten einen festen Punkt  und betrachten Differenzierbarkeit im Punkt
und betrachten Differenzierbarkeit im Punkt  .
.
Partielle Differenzierbarkeit
Dies ist der schwächste Differenzierbarkeitsbegriff. Die Funktion
heißt partiell differenzierbar am Punkt
in Richtung  ,
falls die partielle
Ableitung
,
falls die partielle
Ableitung

existiert. Man betrachtet also alle Variablen bis auf
als konstant und betrachtet die so erhaltene Funktion einer Veränderlichen.
Die Funktion
heißt partiell differenzierbar, wenn in jedem Punkt alle partiellen
Ableitungen existieren. Sie heißt stetig partiell differenzierbar, falls
alle partiellen Ableitungen stetige Funktionen von
nach
sind.
Aus partieller Differenzierbarkeit folgt nicht die Stetigkeit, sondern nur Stetigkeit in Richtung der Koordinatenachsen.
Richtungsableitung
Ist  ein Einheitsvektor,
so ist die (beidseitige) Richtungsableitung
von
in Richtung
ein Einheitsvektor,
so ist die (beidseitige) Richtungsableitung
von
in Richtung  an der Stelle
definiert als
an der Stelle
definiert als
 .
.
Betrachtet man nur positive  ,
so erhält man die einseitige Richtungsableitung
,
so erhält man die einseitige Richtungsableitung
 .
.
Die Funktion
heißt (einseitig) differenzierbar in Richtung von ,
falls die (einseitige) Richtungsableitung von
in Richtung
existiert. Die Richtungsableitungen in Richtung der Einheitsvektoren der Standardbasis sind gerade
die partiellen Ableitungen
 .
.
Totale Differenzierbarkeit
Die Funktion
heißt total differenzierbar im Punkt ,
falls eine lineare
Abbildung  und eine Funktion
existieren, so dass sich
bis auf den Fehler
durch
und eine Funktion
existieren, so dass sich
bis auf den Fehler
durch  approximieren lässt,
approximieren lässt,

und
von höherer als erster Ordnung gegen 0 geht, das heißt  für
für  .
.
Die lineare Abbildung
heißt totale
Ableitung von
im Punkt .
Sie wird mit  bezeichnet. Die Matrixdarstellung
bezüglich der Standardbasis heißt Jacobi-Matrix
und wird mit
bezeichnet. Die Matrixdarstellung
bezüglich der Standardbasis heißt Jacobi-Matrix
und wird mit  oder auch
bezeichnet. Die Funktion
heißt total differenzierbar, falls sie in jedem Punkt total
differenzierbar ist.
oder auch
bezeichnet. Die Funktion
heißt total differenzierbar, falls sie in jedem Punkt total
differenzierbar ist.
Eine total differenzierbare Funktion ist auch stetig.
In der neueren mathematischen Literatur spricht man statt von totaler Differenzierbarkeit meist einfach von Differenzierbarkeit. Die totale Ableitung wird auch Differential genannt.
Zusammenhänge zwischen den verschiedenen Differenzierbarkeitsbegriffen
- Ist
beidseitig differenzierbar in jede Richtung, so ist
insbesondere partiell differenzierbar.
- Ist
total differenzierbar, so ist
differenzierbar in jede Richtung (also insbesondere auch partiell
differenzierbar). Die Einträge der Jacobi-Matrix sind die partiellen
Ableitungen
 .
.
- Man erhält die Richtungsableitung in Richtung
 ,
indem man die totale Ableitung (eine lineare Abbildung) auf den Vektor
anwendet.
,
indem man die totale Ableitung (eine lineare Abbildung) auf den Vektor
anwendet.

Die Umkehrungen gelten nicht:
- Aus der partiellen Differenzierbarkeit folgt weder die totale Differenzierbarkeit noch die beidseitige oder einseitige Differenzierbarkeit in Richtungen, die keine Koordinatenrichtungen sind.
- Auch aus der beidseitigen Differenzierbarkeit in alle Richtungen folgt
nicht totale Differenzierbarkeit. Selbst dann nicht, wenn der Kandidat für die
totale Ableitung, die Abbildung
 ,
linear ist.
,
linear ist.
Anders ist es, wenn man nicht nur die Existenz, sondern auch die Stetigkeit der partiellen Ableitungen voraussetzt.
- Ist
stetig partiell differenzierbar, so ist
auch total differenzierbar.
Man nennt stetig partiell differenzierbare Funktionen deshalb auch einfach stetig differenzierbar. Auch hier gilt die Umkehrung nicht:
- Aus totaler Differenzierbarkeit folgt nicht die Stetigkeit der partiellen Ableitungen.
Insgesamt gilt somit:
- stetige partielle Differenzierbarkeit ⇒ totale Differenzierbarkeit ⇒ Differenzierbarkeit in jede Richtung ⇒ partielle Differenzierbarkeit,
es gilt jedoch keine der Umkehrungen.
Beispiele
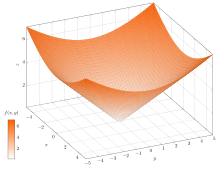
- Jede Funktion, die sich als Polynom in den Variablen
 darstellen lässt, ist stetig differenzierbar.
darstellen lässt, ist stetig differenzierbar. - Summen, Produkte, Quotienten und Verkettungen von stetig differenzierbaren Funktionen sind stetig differenzierbar.
Gegenbeispiele
Alle Gegenbeispiele sind Funktionen auf dem  .
Die Koordinaten werden mit
und
.
Die Koordinaten werden mit
und  bezeichnet statt mit
bezeichnet statt mit  und
und  .
Von Interesse ist hier nur die Differenzierbarkeit und Stetigkeit am Ursprung
.
Überall sonst sind die Funktionen stetig differenzierbar.
.
Von Interesse ist hier nur die Differenzierbarkeit und Stetigkeit am Ursprung
.
Überall sonst sind die Funktionen stetig differenzierbar.
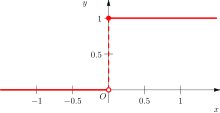
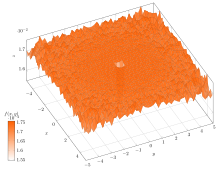
Partiell differenzierbar, aber nicht stetig und nicht alle Richtungsableitungen
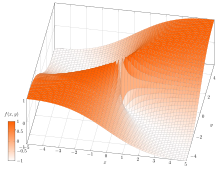

Die Funktion

ist an der Stelle (0,0) partiell differenzierbar. Auf den Koordinatenachsen
hat die Funktion konstant den Wert 0, das heißt für alle
und
gilt
 .
.
Daraus folgt
 .
.
Die Funktion ist jedoch bei (0,0) nicht stetig. Auf der ersten
Winkelhalbierenden (mit Ausnahme des Ursprungs) hat
konstant den Wert eins ( ).
Nähert man sich dem Ursprung auf der ersten Winkelhalbierenden, so streben die
Funktionswerte also gegen 1. Die Richtungsableitung in andere Richtungen als die
der Koordinatenachsen existieren nicht.
).
Nähert man sich dem Ursprung auf der ersten Winkelhalbierenden, so streben die
Funktionswerte also gegen 1. Die Richtungsableitung in andere Richtungen als die
der Koordinatenachsen existieren nicht.
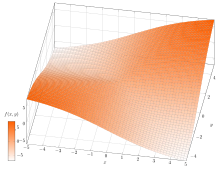

Die Funktion

ist an der Stelle (0,0) partiell differenzierbar und stetig. Alle einseitigen Richtungsableitungen existieren, aber außer in die Koordinatenrichtungen nicht die beidseitigen.
Einseitige, aber keine beidseitigen Richtungsableitungen

Die euklidische Norm

verallgemeinert die Betragsfunktion. Sie ist überall stetig.
Für jeden Einheitsvektor  existiert die einseitige Richtungsableitung von
in
und es gilt
existiert die einseitige Richtungsableitung von
in
und es gilt

Der Grenzwert existiert nur einseitig, also existieren die beidseitigen Richtungsableitungen nicht. Insbesondere ist die Funktion auch nicht partiell differenzierbar.
Alle Richtungsableitungen existieren, aber definieren keine lineare Abbildung


Hier existieren alle Richtungsableitungen, für die partiellen Ableitungen gilt

Die Abbildung  ist jedoch nicht linear. Für den Einheitsvektor
ist jedoch nicht linear. Für den Einheitsvektor  gilt
gilt

während

Alle Richtungsableitungen existieren und definieren eine lineare Abbildung, aber nicht total differenzierbar


Hier existieren alle Richtungsableitungen, für jeden Vektor  gilt
gilt  .
Insbesondere ist
partiell differenzierbar mit
.
Insbesondere ist
partiell differenzierbar mit

und die Abbildung

ist die Nullabbildung, also trivialerweise linear.
Die Funktion ist auch stetig. Sie ist jedoch an der Stelle (0,0) nicht total
differenzierbar. Wäre sie es, so wäre  die Nullabbildung und für jeden Vektor
die Nullabbildung und für jeden Vektor  gälte
gälte
 .
.
Für das Fehlerglied  gälte also
gälte also
 .
.
Setzt man  und
und  mit
mit  ,
so erhält man
,
so erhält man
 und
und  ,
also
,
also  .
.
Für
gegen 0 geht dieser Term gegen  statt gegen 0.
statt gegen 0.
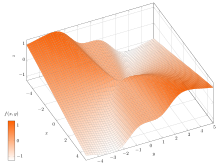
Total differenzierbar, aber nicht stetig partiell differenzierbar

Diese Funktion ist der entsprechenden Beispielfunktion einer Variablen nachgebildet, der Nachweis verläuft im Prinzip genauso wie dort.

Die Funktion ist an der Stelle (0,0) total differenzierbar, die Ableitung ist die Nullfunktion. Nähert man sich dem Nullpunkt, so divergieren jedoch die partiellen Ableitungen, zum Beispiel geht der Betrag von

gegen unendlich für
gegen 0.
Abbildungen zwischen endlichdimensionalen Vektorräumen
Eine Abbildung  von einer offenen Menge
in den Vektorraum
von einer offenen Menge
in den Vektorraum  lässt sich durch ihre Komponentenfunktionen darstellen:
lässt sich durch ihre Komponentenfunktionen darstellen:
 mit
mit  für
für  .
.
Differenzierbarkeit von
lässt sich dann auf Differenzierbarkeit der  zurückführen.
ist (im Punkt
zurückführen.
ist (im Punkt  )
genau dann partiell differenzierbar (differenzierbar in Richtung des Vektors
,
total differenzierbar, stetig partiell differenzierbar), wenn alle
Komponentenfunktionen
)
genau dann partiell differenzierbar (differenzierbar in Richtung des Vektors
,
total differenzierbar, stetig partiell differenzierbar), wenn alle
Komponentenfunktionen  diese Eigenschaft haben.
diese Eigenschaft haben.
Ist
im Punkt
total differenzierbar, so ist  eine lineare Abbildung von
nach .
Ihre Darstellungsmatrix, die Jacobi-Matrix, besteht aus den partiellen
Ableitungen
eine lineare Abbildung von
nach .
Ihre Darstellungsmatrix, die Jacobi-Matrix, besteht aus den partiellen
Ableitungen

und die Richtungsableitung von
im Punkt
in Richtung
ist das Bild des Vektors
unter der linearen Abbildung .
Funktionen und Abbildungen auf unendlichdimensionalen Vektorräumen
Auf unendlichdimensionalen Vektorräumen gibt es keine Koordinaten, deshalb gibt es keine partielle Differenzierbarkeit. Die Begriffe Richtungsableitung und totale Differenzierbarkeit lassen sich jedoch auf unendlichdimensionale Vektorräume verallgemeinern. Dabei spielt im Gegensatz zum Endlichdimensionalen die Topologie auf den Vektorräumen eine wichtige Rolle. Typische Beispiel für unendlichdimensionale Vektorräume sind Funktionenräume, also Vektorräume, deren „Vektoren“ Funktionen sind. Zur Unterscheidung nennt man die auf diesen Vektorräume definierten Funktionen Funktionale und nennt Abbildungen zwischen solchen Vektorräumen Operatoren.
Gâteaux-Differenzierbarkeit
→ Hauptartikel: Gâteaux-Differential
Der Richtungsableitung entspricht die Gâteaux-Ableitung. Gegeben sei
ein normierter
Vektorraum  (das heißt ein (typischerweise unendlichdimensionaler) Vektorraum zusammen mit
einer Norm
(das heißt ein (typischerweise unendlichdimensionaler) Vektorraum zusammen mit
einer Norm
 ),
eine offene Teilmenge
),
eine offene Teilmenge  und ein Funktional
und ein Funktional  .
Die Gâteaux-Ableitung von
an einem „Punkt“
in Richtung eines Vektors
.
Die Gâteaux-Ableitung von
an einem „Punkt“
in Richtung eines Vektors  ist dann gegeben durch
ist dann gegeben durch
 ,
,
falls der Grenzwert existiert.
Falls die Gâteaux-Ableitung für jedes
existiert, dann ist eine Abbildung  ,
,
 erklärt. Aus der Definition folgt sofort, dass diese Abbildung positiv homogen
ist, also
erklärt. Aus der Definition folgt sofort, dass diese Abbildung positiv homogen
ist, also  für alle
für alle  .
Wie im Endlichdimensionalen folgt aus der Existenz aller Richtungsableitungen
nicht, dass
.
Wie im Endlichdimensionalen folgt aus der Existenz aller Richtungsableitungen
nicht, dass  additiv und damit linear ist. Auch wenn die Abbildung linear ist, folgt nicht,
dass sie stetig ist.
additiv und damit linear ist. Auch wenn die Abbildung linear ist, folgt nicht,
dass sie stetig ist.
Für den Begriff Gâteaux-Differenzierbarkeit gibt es mehrere nicht verträgliche Konventionen:
Manche Autoren nennen ein Funktional
Gâteaux-differenzierbar im Punkt ,
falls alle  existieren, und bezeichnen dann die Abbildung
als Gateaux-Ableitung von
im Punkt .
Andere fordern zusätzlich, dass
linear und stetig ist.
existieren, und bezeichnen dann die Abbildung
als Gateaux-Ableitung von
im Punkt .
Andere fordern zusätzlich, dass
linear und stetig ist.
Ganz analog definiert man Gâteaux-Differenzierbarkeit und Gâteaux-Ableitung
für Operatoren
von einem normierten Vektorraum
in einen andern normierten Vektorraum  (typischerweise ein Banachraum).
Die in der Definition der Gâteaux-Ableitung geforderte Konvergenz versteht sich
dann im Sinne der Norm von .
Entsprechendes gilt für die Stetigkeit von
(typischerweise ein Banachraum).
Die in der Definition der Gâteaux-Ableitung geforderte Konvergenz versteht sich
dann im Sinne der Norm von .
Entsprechendes gilt für die Stetigkeit von  .
.
Fréchet-Differenzierbarkeit
→ Hauptartikel: Fréchet-Ableitung
Der totalen Differenzierbarkeit im Endlichdimensionalen entspricht bei
unendlichdimensionalen Vektorräumen die Fréchet-Differenzierbarkeit.
Gegeben seien Banachräume
und ,
eine offene Teilmenge ,
eine Abbildung  und ein Punkt .
und ein Punkt .
Die Abbildung
heißt Fréchet-differenzierbar, wenn eine beschränkte (also stetige)
lineare Abbildung  und eine Abbildung
und eine Abbildung  existieren, sodass für alle
existieren, sodass für alle  mit
mit  gilt
gilt

und

Dabei steht im Zähler die Norm von ,
im Nenner die von .
Der lineare
Operator
heißt in diesem Fall Fréchet-Ableitung von
an der Stelle .
Zusammenhänge
Wie im Endlichdimensionalen ist jede Fréchet-differenzierbare Abbildung
auch Gâteaux-differenzierbar und die Gâteaux-Ableitung stimmt mit der
Fréchet-Ableitung überein. Umgekehrt braucht
im Punkt
selbst dann nicht Fréchet-differenzierbar zu sein, wenn die Gâteaux-Ableitung
linear und stetig ist.
Differenzierbare Abbildungen zwischen differenzierbaren Mannigfaltigkeiten
Die Differenzierbarkeit von Abbildungen zwischen differenzierbaren Mannigfaltigkeiten wird auf die Differenzierbarkeit ihrer Kartendarstellungen zurückgeführt. Dabei muss Stetigkeit schon vorausgesetzt werden.
Es seien  und
und  differenzierbare Mannigfaltigkeiten der Dimensionen
bzw.
und der Differenzierbarkeitsklasse
differenzierbare Mannigfaltigkeiten der Dimensionen
bzw.
und der Differenzierbarkeitsklasse
 und es sei
und es sei  eine stetige Abbildung. Zu jedem Punkt
eine stetige Abbildung. Zu jedem Punkt  existiert dann eine Karte
existiert dann eine Karte
 von
um
von
um  ,
das heißt eine offene Umgebung
,
das heißt eine offene Umgebung  ,
die
enthält, und ein auf
,
die
enthält, und ein auf  definierter Homöomorphismus
definierter Homöomorphismus
 auf eine offene
Teilmenge des .
Genauso existiert auch eine Karte
auf eine offene
Teilmenge des .
Genauso existiert auch eine Karte  von
um den Bildpunkt
von
um den Bildpunkt  .
Da
stetig ist, können die Karten so gewählt werden, dass
.
Da
stetig ist, können die Karten so gewählt werden, dass  ganz in
liegt. Unter der Kartendarstellung von
bezüglich dieser Karten versteht man dann die Abbildung
ganz in
liegt. Unter der Kartendarstellung von
bezüglich dieser Karten versteht man dann die Abbildung

Dies ist eine Abbildung von der offenen Teilmenge  des
in die offene Teilmenge
des
in die offene Teilmenge  des .
des .
Die Abbildung
heißt stetig differenzierbar, falls sie stetig ist und ihre
Kartendarstellungen stetig differenzierbar sind. Sie heißt -mal
stetig differenzierbar (für  ),
oder von der Klasse ,
falls ihre Kartendarstellungen -mal
stetig differenzierbar.
),
oder von der Klasse ,
falls ihre Kartendarstellungen -mal
stetig differenzierbar.
Die Differenzierbarkeit hängt nicht von der Wahl der Karten ab (solange
ist), da die Kartenwechselabbildungen -Diffeomorphismen sind.
Ist
oder
der euklidische
Raum, so kann man dort auf die Karte verzichten. Insbesondere gilt:
Eine Funktion  ist genau dann -mal
stetig differenzierbar, wenn das für ihre Kartendarstellungen
ist genau dann -mal
stetig differenzierbar, wenn das für ihre Kartendarstellungen  ,
bezüglich Karten
von
gilt.
,
bezüglich Karten
von
gilt.
Analog definiert man die komplexe Differenzierbarkeit für komplexwertige Funktionen auf komplexen Mannigfaltigkeiten und Abbildungen zwischen komplexen Mannigfaltigkeiten.
Für die Definition der Ableitung einer Abbildung
zwischen Mannigfaltigkeiten bzw. einer Funktion
auf einer Mannigfaltigkeit siehe Tangentialraum
und Pushforward.
Begriffserweiterungen
Folgende Konzepte sind Verallgemeinerungen der Differenzierbarkeit:
- schwache Ableitungen
- Differenzierbarkeit im Sinne von Distributionen
- Radon-Nikodým-Ableitung


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 12.01. 2021