Dehnung
Die Dehnung (Formelzeichen:
 )
ist eine Angabe für die relative Längenänderung (Verlängerung bzw. Verkürzung)
eines Körpers
unter Belastung,
beispielsweise durch eingeprägte Kräfte
oder durch eine Temperaturänderung (Wärmeausdehnung).
Wenn die Abmessung des Körpers sich vergrößert, spricht man von einer
positiven Dehnung (Streckung), andernfalls von einer negativen
Dehnung oder Stauchung.
)
ist eine Angabe für die relative Längenänderung (Verlängerung bzw. Verkürzung)
eines Körpers
unter Belastung,
beispielsweise durch eingeprägte Kräfte
oder durch eine Temperaturänderung (Wärmeausdehnung).
Wenn die Abmessung des Körpers sich vergrößert, spricht man von einer
positiven Dehnung (Streckung), andernfalls von einer negativen
Dehnung oder Stauchung.
Definition
Die Dehnung ist definiert als:

Dabei ist  die Längenänderung und
die Längenänderung und  ist die ursprüngliche Länge.
Die Dehnung wird als Größe
der Dimension Zahl angegeben, auch mit 100 % multipliziert als Prozentzahl.
Die Werte von
und
werden üblicherweise direkt am Prüfkörper
gemessen.
ist die ursprüngliche Länge.
Die Dehnung wird als Größe
der Dimension Zahl angegeben, auch mit 100 % multipliziert als Prozentzahl.
Die Werte von
und
werden üblicherweise direkt am Prüfkörper
gemessen.
Im technischen Bereich ist auch die Angabe der Dehnung in Mikrometer pro Meter (µm/m) üblich. Dafür wird, abgeleitet von Mikroepsilon, auch die Schreibweise µeps oder µε verwendet. 1 µm/m entspricht 0,0001 Prozent, eine 1-prozentige Dehnung entspricht 10.000 µm/m.
Für viele Werkstoffe ist die Dehnung in gewissen Grenzen proportional zur wirkenden Spannung, was durch das Hookesche Gesetz im linear-elastischen Bereich ausgedrückt wird. Das Verhältnis von der Spannung zur Dehnung wird als Elastizitätsmodul bezeichnet.
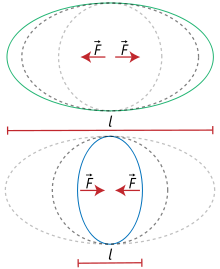
Infolge der Querkontraktion ergibt sich auch quer zur Kraftrichtung und zur primären Dehnung eine sekundäre Dehnung mit umgekehrten Vorzeichen. Das Verhältnis aus Quer- und Längsdehnung wird Poissonzahl genannt.
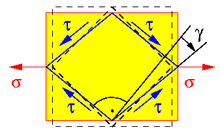
In einem allgemeinen Belastungsszenario können Zug-, Druck- und Scherkräfte auch kombiniert auftreten. Dies hat ebenso komplexe Dehnungen in allen drei Raumrichtungen zur Folge. Der Dehnungszustand ist zudem vom zugrunde gelegten Bezugssystem abhängig. So tritt bei der Dehnung der quadratischen Scheibe im Bild auch eine Scherung γ auf. Die diesem Umstand gerecht werdende, vollständige mathematische Beschreibung des Dehnungsszustands erfolgt über Tensoren der Kraft bzw. Dehnung. Der Verzerrungstensor ε ist – wie auch der Spannungstensor σ – grundlegend für die Elastizitätstheorie fester Körper; sie bilden insbesondere das Grundgerüst für Computermodelle der Verformungssimulation, wie sie z.B. mit der Finite-Elemente-Methode ausgeführt werden kann.
Grafisch können die Zusammenhänge zwischen den Spannungen und Dehnungen mit Spannungs-Dehnungs-Diagrammen und die Abhängigkeit von der Ausrichtung des Bezugssystems in Form der Mohrschen Spannungs- bzw. Dehnungskreise dargestellt und ausgewertet werden.
Bei Betrachtung von Dehnungen als Antwort auf zwei (oder mehr) aufeinander folgende Krafteinwirkungen sind zwei verschiedene Bezugssysteme für die Berechnung gebräuchlich:
Technische Dehnung
Wird die Dehnung jeweils bezogen auf die Ausgangslänge
vor der ersten Krafteinleitung angegeben, so spricht man von
technischer Dehnung. Diese Methode ist besonders einfach, weil die
Ausgangslänge
dann eine Konstante
ist. Die technische Dehnung wird auch Cauchy-Dehnung
 genannt.
genannt.
Sie weist jedoch den Nachteil auf, dass die Summe zweier Teildehnungen nicht der Gesamtdehnung entspricht:
 ist nicht identisch mit
ist nicht identisch mit  .
.
Solange jedoch  ,
gilt näherungsweise:
,
gilt näherungsweise:
 bzw.
bzw.  und damit
und damit  .
.
Logarithmische Dehnung
Die logarithmische oder „wahre“ Dehnung  (auch Hencky-Dehnung
(auch Hencky-Dehnung
 genannt)
wird jeweils auf die aktuelle Länge des Körpers bezogen, nachdem er also
durch frühere Krafteinwirkungen bereits vorverformt worden ist.
genannt)
wird jeweils auf die aktuelle Länge des Körpers bezogen, nachdem er also
durch frühere Krafteinwirkungen bereits vorverformt worden ist.
Sie wird definiert durch:

und damit
 ,
,
wobei mit  die Hauptstreckungen
in der jeweiligen Richtung bezeichnet werden.
die Hauptstreckungen
in der jeweiligen Richtung bezeichnet werden.
Mathematisch gesehen ist die technische Dehnung eine Reihenentwicklung der Formel für die „wahre“ Dehnung in eine Taylorreihe mit Abbruch nach dem ersten Glied. Für kleine Dehnungen besteht daher zwischen beiden Definitionen der Zusammenhang:
 .
.
Nominelle Dehnung
Als nominell wird die Dehnung bezeichnet, wenn die Messwerte
und
nicht am Probekörper, sondern zwischen den Einspannklemmen der Prüfmaschine bestimmt
werden. Diese Art der Dehnungsbestimmung findet bei Werkstoffen Anwendung, die
sich über den Messbereich
der Extensometer
hinaus verformen lassen.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 06.08. 2024