Orthotropie
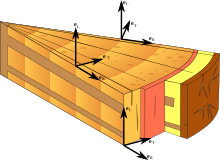
Die Orthotropie (von griechisch ορθός orthos „korrekt, senkrecht, gerade stehend“ und τρόπος tropos „Weg, Art und Weise“) ist eine spezielle Art der Richtungsabhängigkeit eines Materials. Orthotrope Materialien wie im Bild haben die folgenden Eigenschaften:
- Das Kraft-Verformungs-Verhalten ändert sich nicht, wenn das Material um 180 Grad um die Orthotropieachsen gedreht wird.
- Im Bezugssystem parallel zu den Orthotropieachsen gibt es keine Kopplung zwischen Normaldehnungen und Schubverzerrungen.
Ein linear elastisches orthotropes Material besitzt maximal neun Materialparameter.
Ein Material ist isotrop, wenn es richtungsunabhängig dasselbe Kraft-Verformungs-Verhalten hat. Bei anisotropischen Materialien ist das Kraft-Verformungs-Verhalten von der Belastungsrichtung abhängig. Die Orthotropie ist ein Spezialfall der Anisotropie und enthält ihrerseits die transversale Isotropie und Isotropie als Sonderfälle.
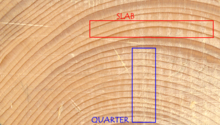
Viele Konstruktionswerkstoffe sind orthotrop, z.B. technisches Holz, Gewebe, viele Faser-Kunststoff-Verbunde und Walzbleche mit Textur.
Symmetriegruppe
Die Richtungsabhängigkeit eines Materials zeichnet sich dadurch aus, dass das Kraft-Verformungs-Verhalten unabhängig (invariant) ist gegenüber nur bestimmten Drehungen des Materials: Bei der Orthotropie sind dies alle 180-Grad-Drehungen um die Orthotropieachsen. Diese Drehungen bilden die Symmetriegruppe des orthotropen Materials.
Die Invarianz gegenüber diesen Drehungen des Materials veranschaulichen zwei Experimente an einem Teilchen: Im ersten Experiment bringt man am Teilchen eine bestimmte Kraft auf und misst die resultierende Verformung. Im zweiten Experiment dreht man das Material zunächst nacheinander um beliebige Orthotropieachsen – um 180 Grad. Dann bringt man dieselbe Kraft auf wie im ersten Experiment und misst erneut die Verformung. Bei orthotropem Material wird man im zweiten Experiment dieselbe Verformung messen wie im ersten. Und zwar auch bei nicht-linear elastischem Materialverhalten.
Die Abhängigkeit von den Drehungen des Materials erkennt man, wenn man im zweiten Experiment um einen anderen Winkel als 180 Grad dreht. Wenn nicht der Spezialfall transversale Isotropie oder Isotropie vorliegt, wird man nun immer eine andere Verformung messen als im ersten Experiment.
Orthotropie in der Linearen Elastizitätstheorie
Gegeben sind zwei Tensoren
zweiter Stufe  und
und  mit 3×3-Koeffizienten
mit 3×3-Koeffizienten  bzw.
bzw.  .
Der allgemeinste lineare Zusammenhang, den es zwischen diesen Koeffizienten
gibt, ist:
.
Der allgemeinste lineare Zusammenhang, den es zwischen diesen Koeffizienten
gibt, ist:
 .
.
Darin sind  81 Koeffizienten mit denen die neun Komponenten
auf neun Komponenten
abgebildet werden. In der linearen Elastizitätstheorie,
in der
der symmetrische Spannungstensor
und
der symmetrische Verzerrungstensor
ist, reduziert sich die Anzahl der unabhängigen Tensor-Komponenten auf sechs, so
dass nur 36 Koeffizienten
unabhängig sind. Diesen Zusammenhang zwischen Spannungen und Verzerrungen kann
man nun in Voigt’scher
Notation auch als Matrizengleichung schreiben:
81 Koeffizienten mit denen die neun Komponenten
auf neun Komponenten
abgebildet werden. In der linearen Elastizitätstheorie,
in der
der symmetrische Spannungstensor
und
der symmetrische Verzerrungstensor
ist, reduziert sich die Anzahl der unabhängigen Tensor-Komponenten auf sechs, so
dass nur 36 Koeffizienten
unabhängig sind. Diesen Zusammenhang zwischen Spannungen und Verzerrungen kann
man nun in Voigt’scher
Notation auch als Matrizengleichung schreiben:
 .
.
Die Matrix  mit den 36 unabhängigen Komponenten
repräsentiert den Elastizitätstensor
des Materials. Im Fall der Hyperelastizität
ist diese Matrix symmetrisch,
so dass dann nur noch 21 Einträge unabhängig sind.
mit den 36 unabhängigen Komponenten
repräsentiert den Elastizitätstensor
des Materials. Im Fall der Hyperelastizität
ist diese Matrix symmetrisch,
so dass dann nur noch 21 Einträge unabhängig sind.
Elastizitätsgesetz für 3D
Ein Material ist linear elastisch orthotrop, wenn eine Orthonormalbasis existiert, so dass das Elastizitätsgesetz dargestellt in Bezug auf diese Basis folgende Form (mit nur zwölf unabhängigen Einträgen) annimmt:

Die Dimension der Elastizitätsmoduln
 und Schubmoduln
und Schubmoduln  ist Kraft pro Fläche während die Querkontraktionszahlen
ist Kraft pro Fläche während die Querkontraktionszahlen
 dimensionslos sind. Die Querkontraktionszahlen beschreiben, wie sich eine
entlang einer Richtung – z.B. der 1-Richtung – gezogene Materialprobe quer
dazu – z.B. in 2-Richtung – kontrahiert. Die entsprechende
Querkontraktionszahl wäre dann
dimensionslos sind. Die Querkontraktionszahlen beschreiben, wie sich eine
entlang einer Richtung – z.B. der 1-Richtung – gezogene Materialprobe quer
dazu – z.B. in 2-Richtung – kontrahiert. Die entsprechende
Querkontraktionszahl wäre dann  .
Die Normaldehnung in i-Richtung wird mit
.
Die Normaldehnung in i-Richtung wird mit  bezeichnet. Dann ist für beliebige Werkstoffe die Querkontraktionszahl
das negative Verhältnis der Normaldehnung in j-Richtung (Wirkung) zu
derjenigen in i-Richtung bei Zug in i-Richtung (Ursache):
bezeichnet. Dann ist für beliebige Werkstoffe die Querkontraktionszahl
das negative Verhältnis der Normaldehnung in j-Richtung (Wirkung) zu
derjenigen in i-Richtung bei Zug in i-Richtung (Ursache):

Die Matrix S ist die Nachgiebigkeitsmatrix des Materials.
Materialparameter
Die zwölf in der obigen Nachgiebigkeitsmatrix vorkommenden Kennwerte ergeben sich bei orthotroper linearer Elastizität aus nur neun Materialparametern, die in Versuchen an makroskopischen Proben ermittelt werden können:
| Formelzeichen | Bedeutung |
|---|---|
|
Elastizitätsmoduln in den Orthotropieachsen |
 |
Schubmoduln in Ebenen senkrecht zu den Orthotropieachsen |
 |
Querkontraktionszahlen bei Zug in Richtung einer Orthotropieachse |
Die Symmetrie der Nachgiebigkeitsmatrix legt die drei restlichen Querdehnzahlen fest:

Damit lautet das Elastizitätsgesetz bei orthotroper, linearer Elastizität:

Durch Invertierung der Nachgiebigkeitsmatrix bekommt man die Steifigkeitsmatrix

mit

Die Nachgiebigkeitsmatrix und Steifigkeitsmatrix sind symmetrisch und an denselben Stellen mit von Null verschiedenen Werten besetzt.
Transversale Isotropie stellt sich ein mit:

Ebener Spannungszustand
Für den Ebenen Spannungszustand (σ₃₃=0,σ₁₃=0,σ₂₃=0) lautet das oben angegebene lineare orthotrope Elastizitätsgesetz:

wobei gilt:

so dass es in der linearen orthotropen Elastizität für den Ebenen Spannungszustand sechs Materialparameter gibt, wenn nur an den Verzerrungen in der Ebene interessiert ist sind es nur mehr vier Materialparameter.
Ebener Verzerrungszustand
Hier sind die Verzerrungen ausschließlich in der Ebene, jedoch gibt es auch Spannungen aus der Ebene.

mit
Stabilitätskriterien
Die Materialparameter können nicht beliebig gewählt werden, sondern müssen gewissen Stabilitätskriterien genügen. Diese folgen aus der Forderung, dass die Steifigkeits- und Nachgiebigkeitsmatrizen positiv definit sein müssen. Dies führt auf die Bedingungen:
- Alle Diagonalelemente der Steifigkeits- und Nachgiebigkeitsmatrix müssen positiv sein (damit sich das Material in Zugrichtung streckt, wenn man daran zieht, und nicht staucht) und
- die Determinante der Steifigkeits- und Nachgiebigkeitsmatrix muss positiv sein (damit es unter Druck komprimiert und nicht expandiert).
Werden an einem realen Werkstoff Materialparameter identifiziert, die diesen Stabilitätskriterien widersprechen, ist Vorsicht geboten. Die Stabilitätskriterien lauten:

Wenn die linke Seite der letzten Ungleichung gegen null geht, setzt das Material einer hydrostatischen Kompression zunehmend Widerstand entgegen. Aus der Symmetrie der Nachgiebigkeitsmatrix folgt ergänzend:

Gründe für die Besetztheit der Steifigkeitsmatrix
In diesem Abschnitt wird die Frage geklärt, warum die Steifigkeitsmatrix nur an den entsprechenden Stellen besetzt ist. Im Allgemeinen tauchen in einem linearen Materialgesetz 21 unabhängige Materialkonstanten auf. Im Fall der Orthotropie reduziert sich aber die Zahl der Konstanten auf 9. Warum das so ist, ist nachfolgend dargestellt.
Drehmatrizen bei 180-Grad-Drehungen
Die (linearen) Abbildungen, die 180-Grad-Drehungen um die Orthotropieachsen beschreiben, lassen sich mit Matrizen beschreiben. Wählt man als Bezug eine Basis, deren Basisvektoren sich mit den senkrecht aufeinanderstehenden Drehachsen decken, dann haben diese orthogonalen Matrizen folgende Gestalt

Diese 3 Matrizen (und zusätzlich die Einheitsmatrix) bilden eine Untergruppe von der Drehgruppe SO(3).
Symmetriebedingung in Indexschreibweise und Voigt’scher Notation
Gedankenexperiment:
Ein Teilchen und dessen Umgebung wird einer bestimmten Deformation unterzogen und
damit einem bestimmten Verzerrungstensor  .
Im einfachsten Fall (der allerdings zur Definition der Orthotropie nicht
ausreichend allgemein ist) könnte das Teilchen nur in einer bestimmten Richtung
gestreckt werden. Nun ändert man die Streckungsrichtung aktiv. Das heißt, man
lässt den materiellen Punkt wie er ist (dreht also das Material nicht) und
unterzieht den Punkt aber (derselben) Streckung in anderer Richtung. Man gelangt
damit zu einem anderen Verzerrungstensor
.
Im einfachsten Fall (der allerdings zur Definition der Orthotropie nicht
ausreichend allgemein ist) könnte das Teilchen nur in einer bestimmten Richtung
gestreckt werden. Nun ändert man die Streckungsrichtung aktiv. Das heißt, man
lässt den materiellen Punkt wie er ist (dreht also das Material nicht) und
unterzieht den Punkt aber (derselben) Streckung in anderer Richtung. Man gelangt
damit zu einem anderen Verzerrungstensor  .
.
Die Änderung der Verzerrungsrichtung kann mit einer Drehmatrix  beschrieben werden. Es gilt
beschrieben werden. Es gilt

Mithilfe eines linearen Materialgesetzes  lässt sich für gegebenen Verzerrungstensor der zugehörige Spannungstensor
ermitteln. Es sei
lässt sich für gegebenen Verzerrungstensor der zugehörige Spannungstensor
ermitteln. Es sei

Im allgemeinen Fall der Anisotropie gilt zwar nicht

Aber genau dies fordert man für die oben beschriebene Teilmenge von SO(3) im
Fall der Orthotropie: Ein Material heißt orthotrop, wenn für die Funktion
folgende Symmetrietransformation für jede der oben genannten (orthogonalen)
Drehmatrizen und für beliebige Verzerrungen gilt

In Indexschreibweise

Nun dieselbe Bedingung in Voigt’scher Notation: Mit der Definition

gilt

Mit der neuen Definition

ergibt sich

In Voigt’scher Notation erhält man also als Symmetriebedingung

Und da dies für beliebige Dehnungen gelten muss, ist die Symmetriebedingung

Spezialfall 180-Grad-Drehungen
Da im Spezialfall der Orthotropie die 3×3-Matrizen Matrizen
nur auf der Hauptdiagonalen
besetzt sind, vereinfachen sich die Definitionen von oben zu

Die drei 3×3-Matrizen entsprechen also den drei 6x6-Matrizen

Auswertung der Symmetriebedingungen für den Spezialfall
Die Symmetriebedingung ausgewertet für diese Matrizen ergibt

An den letzten 3 Gleichungen erkennt man, dass  nur folgende Gestalt haben kann
nur folgende Gestalt haben kann

Da diese Voigt’sche Steifigkeitsmatrix außerdem symmetrisch ist, bleibt

Zusammenfassung
- Die Orthotropie in der linearen Elastizitätstheorie lässt sich definieren als ein Spezialfall der Anisotropie, bei dem die Steifigkeits- oder Nachgiebigkeitsmatrix eine besonders einfache Form annimmt (9 Konstanten anstelle von 21 Konstanten im allgemeinen Fall).
- Neben der Orthotropie gibt es noch andere Spezialfälle der Anisotropie,
z.B. Transversalisotropie, Isotropie etc. Hierbei werden dieselben
Symmetriebedingungen angegeben. Nur werden dann andere Untergruppen der
Drehgruppe (also andere Matrizen )
betrachtet.
- An der Form des elastischen Gesetzes erkennt man, dass die Kopplung zwischen Zug und Schub für Belastung entlang der Orthotropierichtungen entfällt.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.05. 2025