Spannungsfunktion
Spannungsfunktionen sind ein Ansatz für die analytische Lösung von Randwertaufgaben der linearen Elastostatik. Die lokale Impulsbilanz ist in der Statik eine Gleichung in der nur die Spannungen und die Schwerkraft vorkommen. Indem die Spannungen mit Spannungsfunktionen ausgedrückt werden, die die Impulsbilanz automatisch einhalten, reduziert sich die Lösung eines Randwertproblems auf das Auffinden von Spannungsfunktionen, die die vorliegenden Randbedingungen und die Kompatibilitätsbedingungen erfüllen. Letztere Bedingungen stellen sicher, dass sich aus den Spannungen ein Verschiebungsfeld ableiten lässt. Die Kompatibilität kann nur bei kleinen Verformungen und linearer Elastizität mit vertretbarem Aufwand sichergestellt werden. Diese Voraussetzungen - Statik, kleine Verformungen und lineare Elastizität - sind in vielen Anwendungen, vor allem im technischen Bereich, gegeben.
Geschichte
Chronologische Abfolge bei der Entwicklung der Spannungsfunktionen
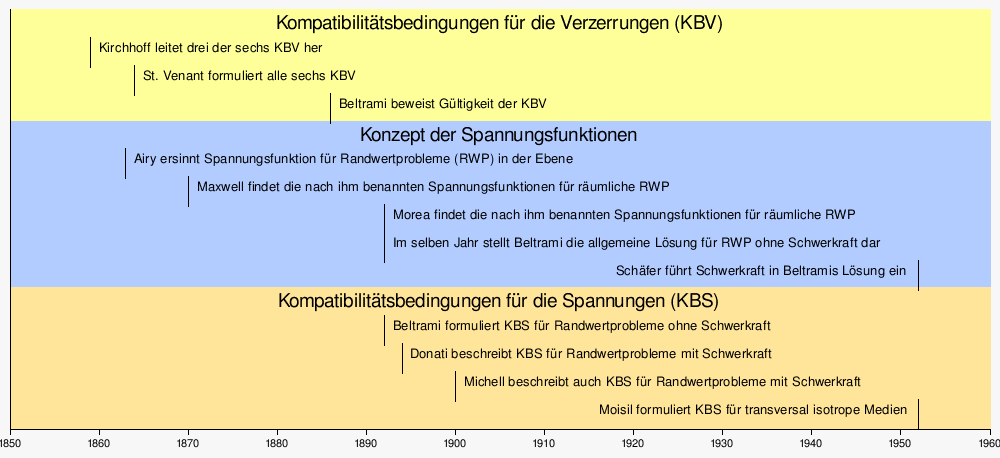
Die Geschichte der Spannungsfunktionen ist eng mit der Geschichte der Formulierung der Kompatibilitätsbedingungen in der linearen isotropen Elastizität verbunden. Kirchhoff leitete 1859 drei der sechs Kompatibilitätsbedingungen für die Verzerrungen (KBV) her und zeigte, wie aus den Verzerrungen die Verschiebungen berechnet werden können. Der Lösungsansatz mit Spannungsfunktionen wurde dann vier Jahre später von George Biddell Airy 1863 ersonnen. Mit der heute nach ihm benannten Airy’schen Spannungsfunktion können Randwertaufgaben in der Ebene gelöst werden. Alle sechs KBV wurden erstmals von St. Venant 1864 vorgelegt, der aber nicht gezeigt hat, dass sie auch hinreichend sind. Von Maxwell und Morea wurden um 1870 bzw. 1892 Spannungsfunktionen für Probleme in drei Dimensionen gefunden. Zwischenzeitlich konnte Beltrami 1886 nachweisen, dass die KBV von St. Venant tatsächlich auch hinreichend sind. Die Kompatibilitätsbedingungen für die Spannungen (KBS) bei isotroper Elastizität in Abwesenheit einer Schwerkraft fand Beltrami 1892 und Donati formulierte den allgemeineren Fall inklusive Schwerkraft 1894. Trotzdem wird diese allgemeinere Gleichung als Beltrami-Michell Gleichung bezeichnet. Beltrami erkannte 1892, dass die bis dahin vorliegenden Spannungsfunktionen von Airy, Maxwell und Morea Spezialfälle eines allgemeineren Ansatzes sind. Allerdings kann Beltramis Lösung kein Schwerefeld berücksichtigen. Schäfer hat 1953 Beltramis Ansatz auf Probleme mit Schwerefeld erweitert. Die KBS für transversal isotrope lineare Elastizität formulierte Moisil 1952.
In Kürze
Die Kompatibilitätsbedingungen für die Verzerrungen lauten

Die Vektoren  bilden die zu den kartesischen Koordinaten
bilden die zu den kartesischen Koordinaten  gehörende Standardbasis,
„
gehörende Standardbasis,
„ “
ist das dyadische-
und „
“
ist das dyadische-
und „ “
das Kreuzprodukt,
“
das Kreuzprodukt,  sind die Komponenten des linearisierten
Verzerrungstensors
sind die Komponenten des linearisierten
Verzerrungstensors  und ein Index nach einem Komma bezeichnet die Ableitung nach der entsprechenden
Koordinate:
und ein Index nach einem Komma bezeichnet die Ableitung nach der entsprechenden
Koordinate:

Der Differenzialoperator  liefert bei symmetrischen
Argumenten divergenzfreie,
symmetrische Tensoren, zu denen auch die Spannungstensoren
in der Statik in Abwesenheit einer Schwerkraft gehören. So lassen sich mit
diesem Differenzialoperator in einfacher Weise die Impulsbilanzen erfüllende
Spannungstensoren
liefert bei symmetrischen
Argumenten divergenzfreie,
symmetrische Tensoren, zu denen auch die Spannungstensoren
in der Statik in Abwesenheit einer Schwerkraft gehören. So lassen sich mit
diesem Differenzialoperator in einfacher Weise die Impulsbilanzen erfüllende
Spannungstensoren  finden:
finden:

Die Komponenten des dabei verwendeten, symmetrischen Arguments  sind Beltramis Spannungsfunktionen. Im Fall der linearen isotropen
Elastizität kann die obige Kompatibilitätsbedingung für die Verzerrungen in
den Spannungen
sind Beltramis Spannungsfunktionen. Im Fall der linearen isotropen
Elastizität kann die obige Kompatibilitätsbedingung für die Verzerrungen in
den Spannungen  ausgedrückt werden:
ausgedrückt werden:

Diese Gleichung ist als Beltrami-Michell Gleichung bekannt. Der
Materialparameter  ist die Querkontraktionszahl.
ist die Querkontraktionszahl.
Die Lösung einer Randwertaufgabe ist nun darauf zurückgeführt, Spannungsfunktionen zu finden, die Spannungen ergeben, die die geforderten Randbedingungen und die Kompatibilitätsbedingungen einhalten.
Die von Airy, Maxwell und Morea gefundenen Spannungsfunktionen passen sich hier als Spezialfälle ein:
| Autor | Jahr | Spannungsfunktionen | Spannungstensor |
|---|---|---|---|
| Airy | 1863 |  |
 |
| Maxwell | 1870 |  |
 |
| Morea | 1892 |  |
 |
| Beltrami | 1892 |  |
: |
Definition
Die lokale Impuls- und Drehimpulsbilanz lauten in Abwesenheit einer Schwerkraft:

Der Differenzialoperator „div“ gibt die Divergenz
des Spannungstensors ,
der aufgrund der Drehimpulsbilanz mit seiner transponierten
 identisch ist. Der Spannungstensor ist also aufgrund der Drehimpulsbilanz
symmetrisch.
identisch ist. Der Spannungstensor ist also aufgrund der Drehimpulsbilanz
symmetrisch.
Wenn
ein Tensorfeld und  ein Differenzialoperator für symmetrische Argumente ist, dann ist
ein Differenzialoperator für symmetrische Argumente ist, dann ist

eine Lösung der Bilanzgleichungen, wenn

ist. Ein Feld
mit diesen Eigenschaften heißt Spannungsfunktion.
Beltramis Spannungsfunktionen
Gegeben sei der Differenzialoperator[1]

Angewendet auf einen beliebigen, symmetrischen Tensor
zeigt:
![{\begin{array}{rcl}{\mathfrak {R}}({\mathbf {A}})^{\top }&=&A_{{ij,kl}}({\hat {e}}_{k}\times {\hat {e}}_{i}\otimes {\hat {e}}_{l}\times {\hat {e}}_{j}){\stackrel {{\begin{array}{c}\scriptscriptstyle i\leftrightharpoons j\\[-1ex]\scriptscriptstyle k\leftrightharpoons l\end{array}}}{=}}A_{{ji,lk}}({\hat {e}}_{l}\times {\hat {e}}_{j}\otimes {\hat {e}}_{k}\times {\hat {e}}_{i})\\&=&A_{{ij,kl}}({\hat {e}}_{l}\times {\hat {e}}_{j}\otimes {\hat {e}}_{k}\times {\hat {e}}_{i})={\mathfrak {R}}({\mathbf {A}})\\\operatorname {div}({\mathfrak {R}}({\mathbf {A}}))&=&{\hat {e}}_{m}\cdot A_{{ij,klm}}({\hat {e}}_{l}\times {\hat {e}}_{j}\otimes {\hat {e}}_{k}\times {\hat {e}}_{i})={\hat {e}}_{j}\cdot ({\hat {e}}_{m}\times {\hat {e}}_{l})A_{{ij,klm}}{\hat {e}}_{k}\times {\hat {e}}_{i}={\vec {0}}\end{array}}](/svg/730ec828d5c350d43ad96b4d3fed0bc9717af321.svg)
weil Komponenten mit vertauschten Indizes l und m gleich groß sind aber
umgekehrtes Vorzeichen besitzen und im Fall l=m verschwinden. Der Tensor
ist also eine Spannungsfunktion. In der Statik in Abwesenheit einer Schwerkraft
liefert also

einen zulässigen Spannungszustand, denn es ist  .
Der Spannungstensor muss aber noch die Kompatibilitätsbedingungen
.
Der Spannungstensor muss aber noch die Kompatibilitätsbedingungen

einhalten, damit er im Einklang mit einem Verschiebungsfeld ist. Die
Komponenten  des Tensors
sind als Beltramis Spannungsfunktionen bekannt. Von anderen Autoren vorher
gefundene Spannungsfunktionen erweisen sich als Spezialfälle von Beltramis
Lösung.
des Tensors
sind als Beltramis Spannungsfunktionen bekannt. Von anderen Autoren vorher
gefundene Spannungsfunktionen erweisen sich als Spezialfälle von Beltramis
Lösung.
Airys Spannungsfunktion
Die Spannungsfunktion  ,
die George Biddell Airy 1863 fand, ist der Spezialfall
,
die George Biddell Airy 1863 fand, ist der Spezialfall

Die Kompatibilitätsbedingung lässt sich für homogenes, isotropes, elastisches Material folgendermaßen

schreiben, was
zu einer biharmonischen
Funktion macht.
Maxwells Spannungsfunktionen
Die von Maxwell 1868 und 1870 beschriebenen Spannungsfunktionen gliedern sich hier mit

ein.
Moreas Spannungsfunktionen
Morea fand 1892 Spannungsfunktionen, die sich hier als der Spezialfall

herausstellen.
Beltrami-Schäfer Spannungsfunktionen
Die Beltrami Spannungsfunktionen oben können wegen
keine Schwerkraft darstellen. Die Beltrami-Schäfer Lösung,

die Schäfer 1953 fand, kann auch Randwertaufgaben mit Schwerkraft der Form

lösen. Der Tensor A ist wie immer symmetrisch. Dann ist

denn wegen  ist
ist
![{\begin{array}{rcl}{\mathfrak {h}}({\vec {h}})^{\top }&=&\operatorname {grad}({\vec {h}})^{\top }+\operatorname {grad}({\vec {h}})-\operatorname {div}({\vec {h}}){\mathbf {I}}={\mathfrak {h}}({\vec {h}})\\\operatorname {div}({\mathfrak {h}}({\vec {h}}))&=&\operatorname {div}[\operatorname {grad}({\vec {h}})+\operatorname {grad}({\vec {h}})^{\top }-\operatorname {div}({\vec {h}}){\mathbf {I}}]=\operatorname {div(grad}({\vec {h}}))+\Delta {\vec {h}}-\operatorname {grad(div}({\vec {h}}))\\&=&\Delta {\vec {h}}=-{\vec {b}}\end{array}}](/svg/c0c52e2aa66750ab02994f481b2d4ce0316e8ebc.svg)
nach Voraussetzung. Der Tensor A muss so gewählt werden, dass die Kompatibilitätsbedingung

und die vorgegebenen Randbedingungen eingehalten werden.
Airy’sche Spannungsfunktion mit Schwerefeld
Mit der Airy’schen Spannungsfunktion kann auch eine Schwerkraft in der Form
 berücksichtigt werden:
berücksichtigt werden:

Dies passt sich mit  und
und  und einer zu bestimmenden Funktion g in die Beltrami-Schäfer Lösung ein:
und einer zu bestimmenden Funktion g in die Beltrami-Schäfer Lösung ein:

Die Kompatibilitätsbedingung lässt sich hier

schreiben, worin der Materialparameter

lautet.
Beispiel
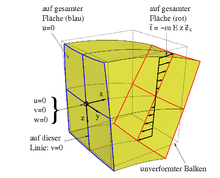
Auf einen in x-Richtung ausgerichteten, linear elastischen Balken wirke ausschließlich eine zur z-Koordinate proportionale Spannung

mit Proportionalitätsfaktor  und Elastizitätsmodul
und Elastizitätsmodul  des Materials des Balkens, siehe Abbildung rechts. Diesen Vorgaben zufolge
lautet der Spannungstensor also:
des Materials des Balkens, siehe Abbildung rechts. Diesen Vorgaben zufolge
lautet der Spannungstensor also:

Die Spannungsfunktion ergibt sich demnach zu

Die Kompatibilitätsbedingung

wird erfüllt, weil alle zweiten Ableitungen der Normalspannung in x-Richtung verschwinden. Es gibt also ein Verschiebungsfeld, das mit diesen Spannungen kompatibel ist. Mit den im Bild skizzierten Randbedingungen lauten diese Verschiebungen

Zusätzlich zum Beispiel auf der Seite Kompatibilitätsbedingung zeigt sich hier, dass dieses Verschiebungsfeld im Gleichgewicht ist.
Siehe auch
Anmerkungen
- ↑
Hier wird die Rotation
eins Tensors als

definiert. Gelegentlich wird in der Literatur
verwendet. Dann lautet der Differenzialoperator:


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 21.04. 2017