Polynominterpolation
In der numerischen Mathematik versteht man unter Polynominterpolation die Suche nach einem Polynom, welches exakt durch vorgegebene Punkte (z.B. aus einer Messreihe) verläuft. Dieses Polynom wird Interpolationspolynom genannt und man sagt, es interpoliere die gegebenen Punkte.
Anwendungen
Polynome lassen sich sehr leicht integrieren und ableiten. Deswegen tauchen interpolierende Polynome an vielen Stellen in der numerischen Mathematik auf, beispielsweise bei der numerischen Integration und entsprechend bei Verfahren zur numerischen Lösung gewöhnlicher Differentialgleichungen.
Problemstellung
Für  gegebene Wertepaare
gegebene Wertepaare  mit paarweise
verschiedenen Stützstellen
mit paarweise
verschiedenen Stützstellen
 wird ein Polynom
wird ein Polynom  maximal
maximal  -ten
Grades gesucht, das alle Gleichungen
-ten
Grades gesucht, das alle Gleichungen

erfüllt. Ein solches Polynom existiert stets und ist eindeutig bestimmt, wie im Folgenden gezeigt wird.
Beim Interpolationsproblem ist also
im Vektorraum  der Polynome mit Grad
oder kleiner zu suchen, kurz
der Polynome mit Grad
oder kleiner zu suchen, kurz  .
Ist
.
Ist  eine Basis
von ,
so ergeben die Gleichungen
eine Basis
von ,
so ergeben die Gleichungen  ein lineares
Gleichungssystem für die Koeffizienten der Basisdarstellung
ein lineares
Gleichungssystem für die Koeffizienten der Basisdarstellung  .
Da sich ein und dasselbe Polynom aber unterschiedlich darstellen lässt, je
nachdem welche Basis für den Vektorraum
gewählt wird, kann man ganz verschiedene Gleichungssysteme erhalten. Wählt man
für
die Standardbasis
.
Da sich ein und dasselbe Polynom aber unterschiedlich darstellen lässt, je
nachdem welche Basis für den Vektorraum
gewählt wird, kann man ganz verschiedene Gleichungssysteme erhalten. Wählt man
für
die Standardbasis  ,
also für
die Darstellung
,
also für
die Darstellung  ,
so erhält man ein Gleichungssystem mit der Vandermonde-Matrix:
,
so erhält man ein Gleichungssystem mit der Vandermonde-Matrix:
 .
.
Diese ist regulär,
wenn die Stützstellen
paarweise verschieden sind, das Gleichungssystem lässt sich dann eindeutig
lösen. Somit ist die Existenz und Eindeutigkeit des gesuchten Polynoms
immer sichergestellt. Trotz der theoretischen Machbarkeit wird diese Art der
Interpolation in der Praxis nicht durchgeführt, da die Berechnung der
Vandermonde-Matrix aufwendig ist ( ,
siehe Landau-Symbole)
und zudem schlecht konditioniert
bei einer ungeeigneten Wahl der Stützstellen.
,
siehe Landau-Symbole)
und zudem schlecht konditioniert
bei einer ungeeigneten Wahl der Stützstellen.
Lösungsverfahren
Obiges Gleichungssystem ließe sich beispielsweise mit dem Gaußschen
Eliminationsverfahren lösen. Der Aufwand dafür ist mit  allerdings vergleichsweise groß. Bei Wahl einer anderen Basis als der
Standardbasis zur Beschreibung des Polynoms
kann der Aufwand verringert werden.
allerdings vergleichsweise groß. Bei Wahl einer anderen Basis als der
Standardbasis zur Beschreibung des Polynoms
kann der Aufwand verringert werden.
Lagrangesche Interpolationsformel
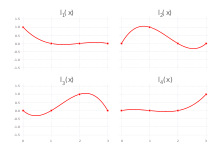
Eher für theoretische Betrachtungen günstig ist eine Darstellung in der Lagrange-Basis. Die Basisfunktionen sind die Lagrange-Polynome

die so definiert sind, dass

gilt, wobei  das Kronecker-Delta
darstellt. Damit entspricht die Matrix
das Kronecker-Delta
darstellt. Damit entspricht die Matrix  genau der Einheitsmatrix.
Die Lösung des Interpolationsproblems lässt sich dann einfach angeben als
genau der Einheitsmatrix.
Die Lösung des Interpolationsproblems lässt sich dann einfach angeben als

mit den Stützwerten
 .
Dies wird häufig benutzt, um die Existenz der Lösung des Interpolationsproblems
zu beweisen. Ein Vorteil der Lagrange-Basis ist somit, dass die Basisfunktionen
.
Dies wird häufig benutzt, um die Existenz der Lösung des Interpolationsproblems
zu beweisen. Ein Vorteil der Lagrange-Basis ist somit, dass die Basisfunktionen
 von den Stützwerten
unabhängig sind. Dadurch lassen sich verschiedene Sätze von Stützwerten
mit gleichen Stützstellen
schnell interpolieren, wenn die Basisfunktionen
einmal bestimmt worden sind. Ein Nachteil dieser Darstellung ist jedoch, dass
alle Basisvektoren bei Hinzunahme einer einzelnen Stützstelle komplett neu
berechnet werden müssen, weshalb dieses Verfahren für die meisten praktischen
Zwecke zu aufwendig ist.
von den Stützwerten
unabhängig sind. Dadurch lassen sich verschiedene Sätze von Stützwerten
mit gleichen Stützstellen
schnell interpolieren, wenn die Basisfunktionen
einmal bestimmt worden sind. Ein Nachteil dieser Darstellung ist jedoch, dass
alle Basisvektoren bei Hinzunahme einer einzelnen Stützstelle komplett neu
berechnet werden müssen, weshalb dieses Verfahren für die meisten praktischen
Zwecke zu aufwendig ist.
Baryzentrische Interpolationsformel
Die Lagrangesche Interpolationsformel kann umgeformt werden in die praktisch relevantere Baryzentrische Interpolationsformel

wobei die Baryzentrischen Gewichte wie folgt definiert sind

Für vorgegebene Stützstellen  können die Gewichte
können die Gewichte  vorberechnet werden, sodass der Aufwand für die Auswertung von
vorberechnet werden, sodass der Aufwand für die Auswertung von  nur noch bei
nur noch bei  liegt. Beim Hinzufügen einer neuen Stützstelle müssen die Gewichte neubestimmt
werden. Dies hat einen Aufwand von
im Vergleich zum Neubestimmen der Lagrangepolynome von .
liegt. Beim Hinzufügen einer neuen Stützstelle müssen die Gewichte neubestimmt
werden. Dies hat einen Aufwand von
im Vergleich zum Neubestimmen der Lagrangepolynome von .
Newtonscher Algorithmus
In diesem Verfahren wird das Polynom
in Newton-Basis dargestellt, so dass die Koeffizienten effizient mit
dem Schema
der dividierten Differenzen bestimmt werden können. Eine effiziente
Auswertung des Polynoms kann dann mithilfe des Horner-Schemas
erfolgen.
Ansatz: Newton-Basis
Als Ansatz für das gesuchte Interpolationspolynom
wählt man die Newton-Basisfunktionen  und
und  mit
mit  ,
so dass
dargestellt wird mit der Newtonschen Interpolationsformel
,
so dass
dargestellt wird mit der Newtonschen Interpolationsformel

Das Gleichungssystem der Gleichungen
hat dann die Form

Im Gegensatz zur komplizierten Vandermonde-Matrix
bei Wahl der Standardbasis  erhält man bei Wahl der Newton-Basis also eine einfach strukturierte untere
Dreiecksmatrix und das Gleichungssystem lässt sich einfach lösen.
erhält man bei Wahl der Newton-Basis also eine einfach strukturierte untere
Dreiecksmatrix und das Gleichungssystem lässt sich einfach lösen.
Bestimmung der Koeffizienten: Schema der dividierten Differenzen
Die Koeffizienten  werden aber nicht direkt aus dem obigen Gleichungssystem bestimmt, sondern
effizienter mithilfe der dividierten Differenzen. Durch Induktion beweist man
mit der Rekursionsformel
von Aitken, dass für die Koeffizienten
gilt
werden aber nicht direkt aus dem obigen Gleichungssystem bestimmt, sondern
effizienter mithilfe der dividierten Differenzen. Durch Induktion beweist man
mit der Rekursionsformel
von Aitken, dass für die Koeffizienten
gilt
![c_i = [x_0, \dotsb, x_i]f](/svg/65c7928abedd733faf0b906a250bef84ede58d1f.svg) .
.
Dabei sind für  die dividierten Differenzen
die dividierten Differenzen ![[x_i, \dotsc, x_j]f](/svg/909d4236fe43970e1bd5d73fb1bbe2a57c4cc3a8.svg) rekursiv definiert durch
rekursiv definiert durch
![[x_i]f = f_i \qquad](/svg/904ad66850b86c6d5afed6d886604356b7c9d27f.svg)
![[x_i,\dotsc,x_j]f = \frac {[x_{i+1},\dotsc,x_j]f-[x_i,\dotsc,x_{j-1}]f}{x_j - x_i}](/svg/4c4be52684ec548d5cc1b895cf21cebc5c00ef2a.svg) .
.
Die Notation mit angehängtem  erklärt sich dadurch, dass oft eine unbekannte Funktion
angenommen wird, die bei bekannten Funktionswerten
erklärt sich dadurch, dass oft eine unbekannte Funktion
angenommen wird, die bei bekannten Funktionswerten  interpoliert werden soll.
interpoliert werden soll.
Die rekursive Berechnung der dividierten Differenzen lässt sich wie folgt
veranschaulichen. Dabei sind die gesuchten Koeffizienten
genau die oberste Schrägzeile:
![{\displaystyle {\begin{array}{crcrccrcrc}[x_{0}]f\\&\searrow \\{}[x_{1}]f&\rightarrow &[x_{0},x_{1}]f\\&\searrow &&\searrow \\{}[x_{2}]f&\rightarrow &[x_{1},x_{2}]f&\rightarrow &[x_{0},x_{1},x_{2}]f\\{}\vdots &\vdots &\vdots &\vdots &\vdots &\ddots \\{}&\searrow &&\searrow &&&\searrow \\{}[x_{n-1}]f&\rightarrow &[x_{n-2},x_{n-1}]f&\rightarrow &[x_{n-3},x_{n-2},x_{n-1}]f&\cdots &\rightarrow &[x_{0}\ldots x_{n-1}]f\\&\searrow &&\searrow &&&\searrow &&\searrow \\{}[x_{n}]f&\rightarrow &[x_{n-1},x_{n}]f&\rightarrow &[x_{n-2},x_{n-1},x_{n}]f&\cdots &\rightarrow &[x_{1}\ldots x_{n}]f&\rightarrow &[x_{0}\ldots x_{n}]f\end{array}}}](/svg/939553671e06570275701b4d2b4fd5e3612135ab.svg)
Offensichtlich ist bei Ergänzung der
Wertepaare  um einen weiteren Punkt
um einen weiteren Punkt  in obigem Schema nur eine weitere Zeile hinzuzufügen, um den zusätzlichen
Koeffizienten
in obigem Schema nur eine weitere Zeile hinzuzufügen, um den zusätzlichen
Koeffizienten ![c_{n+1} = [x_0, \dotsc, x_{n+1}]f](/svg/95a63eca6362ef63854a54bda4cf3dd1785c7436.svg) zu berechnen. Die zuvor bestimmten Koeffizienten
zu berechnen. Die zuvor bestimmten Koeffizienten  müssen nicht neu berechnet werden.
müssen nicht neu berechnet werden.
Alternativ zur obigen rekursiven Definition wird zum Beispiel in einem der
Artikel von Marsden
die dividierte Differenz ![{\displaystyle [x_{0},\ldots ,x_{n}]f}](/svg/b1926ec7f558f45434e01fb33edddef040251026.svg) einer hinreichend oft differenzierbaren Funktion
als der eindeutige Koeffizient zur höchsten Potenz von
einer hinreichend oft differenzierbaren Funktion
als der eindeutige Koeffizient zur höchsten Potenz von  eines Polynoms -ten
Grads
eines Polynoms -ten
Grads  definiert, das
an den Stellen
definiert, das
an den Stellen  interpoliert. Tritt dabei ein Wert in der Sequenz
mit der Vielfachheit
interpoliert. Tritt dabei ein Wert in der Sequenz
mit der Vielfachheit  auf, so sollen die Ableitungen des Polynoms die Ableitungen der Funktion
an dieser Stelle bis zur Ordnung
auf, so sollen die Ableitungen des Polynoms die Ableitungen der Funktion
an dieser Stelle bis zur Ordnung  interpolieren. Es gilt somit
interpolieren. Es gilt somit
![{\displaystyle [x_{0},\dotsc ,x_{k}]f={\frac {f^{(k)}(x^{*})}{k!}}\qquad {\text{falls}}\quad x^{*}:=x_{0}=\ldots =x_{k}\,.}](/svg/57388852c419e9fc0648e011bb48c09e490b2e3a.svg)
Auswertung des Polynoms: Horner-Schema
Wenn die Koeffizienten
des Interpolationspolynoms
einmal bekannt sind, kann man es effizient mithilfe des Horner-Schemas auswerten.
Dazu schreibt man
in der Form (einfache Umformung der Newtonschen Interpolationsformel)
 ,
,
so dass
rekursiv berechnet werden kann durch

Dies erfordert einen Aufwand von .
Algorithmus von Neville-Aitken
Ähnlich wie im Newtonschen
Algorithmus wird beim Algorithmus von Neville-Aitken die Lösung rekursiv
berechnet. Dazu bezeichne  das eindeutig bestimmte Interpolationspolynom
das eindeutig bestimmte Interpolationspolynom  -ten
Grades zu den
-ten
Grades zu den  Stützpunkten
Stützpunkten  ,
wobei
,
wobei  ist. Es gilt dann die Rekursionsformel von Aitken:
ist. Es gilt dann die Rekursionsformel von Aitken:

Beweisen lässt sie sich durch Einsetzen von ,
wodurch man verifiziert, dass die rechte Seite der Gleichung die
Interpolationsbedingung erfüllt. Die Eindeutigkeit des Interpolationspolynoms
liefert dann die Behauptung.
Mit dem Schema von Neville kann die Auswertung von  dann rekursiv erfolgen:
dann rekursiv erfolgen:

Vergleich der Lösungsverfahren
Möchte man alle Koeffizienten des Interpolationspolynoms
bestimmen, so bietet der Newtonsche Algorithmus hierfür den geringsten
notwendigen Aufwand von .
Das so bestimmte Polynom lässt sich dann mit
Operationen an einer Stelle auswerten. Darum ist der Newtonsche Algorithmus gut
geeignet, wenn das Interpolationspolynom an vielen Stellen ausgewertet werden
soll. Auch lassen sich effizient weitere Stützpunkte hinzufügen. Liegen die
Stützstellen oder die Stützwerte allerdings zu nahe beieinander, so besteht die
Gefahr der Auslöschung
bei der Bestimmung der dividierten Differenzen.
Der Neville-Aitken-Algorithmus ist dagegen gut geeignet, wenn ein Interpolationspolynom nur an ganz wenigen Stellen ausgewertet werden soll, dabei ist er weniger anfällig gegen Auslöschung. Auch im Neville-Aitken-Algorithmus lassen sich effizient neue Stützpunkte hinzufügen. So kann z.B. eine gewünschte Genauigkeit der Interpolation an einer Stelle durch Hinzufügen immer weiterer Stützstellen erreicht werden.
Beispiel: Interpolation der Tangensfunktion
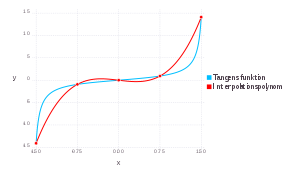
Interpoliere die Funktion  bei gegebenen Punkten
bei gegebenen Punkten

|

|

|

|

|

|

|

|

|

|
Lösung mit Lagrange
Die Lagrange-Basisfunktionen sind

also ist das Interpolationspolynom

Lösung mit Newton
Die dividierten Differenzen sind hier

und das Interpolationspolynom ist

Verwendet man genauere Startwerte  ,
verschwinden der erste und der dritte Koeffizient.
,
verschwinden der erste und der dritte Koeffizient.
Interpolationsgüte
Fehlerabschätzung
Gegeben sei eine Funktion ,
deren
Funktionswerte
an den Stellen
durch das Polynom
interpoliert werden. Mit  sei das kleinste Intervall bezeichnet, das die Stützstellen
und eine Stelle
enthält. Ferner sei
()-mal
stetig differenzierbar auf .
Dann existiert ein
sei das kleinste Intervall bezeichnet, das die Stützstellen
und eine Stelle
enthält. Ferner sei
()-mal
stetig differenzierbar auf .
Dann existiert ein  ,
für das gilt:
,
für das gilt:

Insbesondere ist also bezüglich der Maximumsnorm
auf ![[a,b]](/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg) und mit
und mit  :
:

Fehleroptimierung nach Tschebyschow
 clustern die Tschebyschow-Punkte an den Intervallrändern.
clustern die Tschebyschow-Punkte an den Intervallrändern.Der Fehler hängt also von einer Ableitung von
ab und von dem Produkt  ,
also den Stützstellen .
Manchmal ist man in der Position, dass man sich Stützstellen selbst wählen kann;
etwa, wenn man ein physikalisches Experiment durchführt, oder aber auch bei
einigen Verfahren zur numerischen Lösung von Differentialgleichungen.
In diesem Fall ist die Frage interessant, für welche Stützstellen die
Maximumsnorm
,
also den Stützstellen .
Manchmal ist man in der Position, dass man sich Stützstellen selbst wählen kann;
etwa, wenn man ein physikalisches Experiment durchführt, oder aber auch bei
einigen Verfahren zur numerischen Lösung von Differentialgleichungen.
In diesem Fall ist die Frage interessant, für welche Stützstellen die
Maximumsnorm  minimal wird.
minimal wird.
Für einen Beweis betrachten man normalerweise normierte Stützstellen
![{\displaystyle {\begin{aligned}w_{n}:[-1,1]\rightarrow \mathbb {R} ,\ w_{n}(x)=\prod _{i=0}^{n}(x-x_{i})\\{\text{mit}}\qquad \forall \,i=0,\ldots ,n:\quad x_{i}\in [-1,1]\,.\end{aligned}}}](/svg/e58912e8072b1e545e37fe4de304485b2343fe16.svg)
Nun kann man die Maximumsnorm der Funktion  wie folgt abschätzen
wie folgt abschätzen
![{\displaystyle \|w_{n}\|_{[-1,1],\infty }=\max _{x\in [-1,1]}|w_{n}(x)|\geq 2^{-n}\,.}](/svg/20cbd34d5049ee56544a19538839b4ac19c1100a.svg)
Pafnuti Lwowitsch Tschebyschow
hat gezeigt, dass die Nullstellen der Tschebyschow-Polynome
(„Tschebyschow-Punkte“) optimale Stützstellen sind. Die Polynome  haben die Nullstellen
haben die Nullstellen  für
für  .
So gewählte Stützstellen liefern eine scharfe Grenze der oberen Abschätzung
.
So gewählte Stützstellen liefern eine scharfe Grenze der oberen Abschätzung
![{\displaystyle \|w_{n}\|_{[-1,1],\infty }=2^{-n}\,.}](/svg/62722527a12b6ef2bc5349044f2d42510b66817d.svg)
Diese Aussage kann dann mit der Transformation
![{\displaystyle {\begin{aligned}\xi \in [-1,1]&\rightsquigarrow x={\frac {a+b}{2}}+{\frac {b-a}{2}}\xi &\in [a,b]\\x\in [a,b]&\rightsquigarrow \xi ={\frac {2x-a-b}{b-a}}&\in [-1,1]\end{aligned}}}](/svg/5675ea18ec0cb5f2406a7eac961e845f053a814f.svg)
auf den Fall eines allgemeinen Intervalls ![[a,b]\subset\mathbb{R}](/svg/a659536067aaaac2db1c44613a09a715f0cf7246.svg) übertragen werden. Der Beweis liefert auch die Abschätzung
übertragen werden. Der Beweis liefert auch die Abschätzung
![{\displaystyle {\begin{aligned}\|w_{n}\|_{[a,b],\infty }=\max _{x\in [a,b]}|w_{n}(x)|=2\left({\frac {b-a}{4}}\right)^{n+1}.\end{aligned}}}](/svg/bda4422015d1c98647312a609085209f5a825f13.svg)
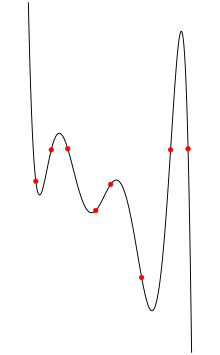
Runges Phänomen
.png)
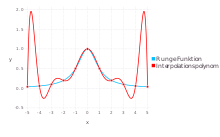
Verbessert sich die Interpolationsgüte, wenn mehr Stützpunkte hinzugefügt
werden? Im Allgemeinen nicht: Bei hohem Grad des Polynoms kann es vorkommen,
dass die Polynomfunktion kaum noch der zu interpolierenden Funktion ähnelt, was
auch als Runges
Phänomen bekannt ist. Polynome streben im Grenzfall  gegen
gegen  .
Verhält sich die zu interpolierende Funktion anders, etwa periodisch oder
asymptotisch konstant, treten starke Oszillationen in der Nähe der
Intervallgrenzen auf. Für solche Funktionen sind Polynominterpolationen über das
gesamte Intervall relativ ungeeignet.
.
Verhält sich die zu interpolierende Funktion anders, etwa periodisch oder
asymptotisch konstant, treten starke Oszillationen in der Nähe der
Intervallgrenzen auf. Für solche Funktionen sind Polynominterpolationen über das
gesamte Intervall relativ ungeeignet.
Tschebyschow-Stützstellen, die an den Intervallgrenzen dichter liegen, können zwar den Gesamtfehler der Interpolation verkleinern, dennoch empfiehlt sich ein Wechsel des Interpolationsverfahrens, etwa zur Spline-Interpolation. Runge gab für dieses Phänomen ein Beispiel an, die nach ihm benannte Runge-Funktion:
![f(x)=\frac{1}{1+x^2}\,,\quad x\in[-5;5]](/svg/96ec58e6d8fd35aa7192d601b451ff3bbc5a1f44.svg)
Konvergenzverhalten
Es gibt aber Bedingungen, unter denen sich die Interpolationsgüte mit
steigender Anzahl von Stützpunkten verbessert: Wenn das Stützstellengitter immer
„feiner“ wird und eine analytische
Funktion interpoliert wird. Genauer: Sei
eine analytische Funktion auf dem Intervall ![I=[a,b] \subset \R](/svg/1cad8a9865c17ed0c40a9e3f5eb3fe4a18df765e.svg) .
Für eine Intervallteilung
.
Für eine Intervallteilung

sei ihre Norm definiert durch

Zu jeder Intervallteilung  gibt es ein eindeutig bestimmtes Polynom
gibt es ein eindeutig bestimmtes Polynom  ,
das
an den Stützstellen
interpoliert. Gilt für eine Folge von Intervallteilungen
,
das
an den Stützstellen
interpoliert. Gilt für eine Folge von Intervallteilungen  ,
so folgt
,
so folgt  gleichmäßig.
gleichmäßig.
Allerdings lässt sich zu jeder Folge  auch eine auf
stetige Funktion
finden, so dass
auch eine auf
stetige Funktion
finden, so dass  nicht gleichmäßig gegen
konvergiert (Satz von Faber).
nicht gleichmäßig gegen
konvergiert (Satz von Faber).
Bestapproximation
Der Zusammenhang zwischen dem Interpolationpolynom und dem Polynom welches
die Funktion am besten (bezüglich der Maximumsnorn
 )
annähert ist wie folgt.
)
annähert ist wie folgt.
Seien dazu folgende gegeben
- eine stetige, zu nähernde Funktion:
![{\displaystyle f\in C([a,b])}](/svg/e35a84e8df64b276d8617c4ce40b9a2dd5bfe6a5.svg)
- Stützstellen:
![{\displaystyle x_{0},\ldots ,x_{n}\in [a,b]}](/svg/f4aceb7b26f39bfb79db34c907f9a5f18fa6eb72.svg)
- Polynominterpolation#Lebesgue_Konstante:

- Interpolationspolynom:
 mit
mit 
- Bestapproximation:
 mit
mit  .
.
Dann gilt die folgende Abschätzung

Verallgemeinerung
Bisher wurden die Stützstellen
des Interpolationspolynoms
als paarweise verschieden angenommen. Bei der Hermiteinterpolation
ist das nicht der Fall. An mehrfach vorkommenden Stützstellen werden dabei nicht
nur die Funktionswerte, sondern auch die Werte der Ableitungen des
Interpolationspolynoms vorgegeben.
Lebesgue Konstante
Sei der Operator,
der einer Funktion
sein Interpolationspolynom  zuordnet, definiert durch
zuordnet, definiert durch
![{\displaystyle \phi _{n}\colon C([a,b])\rightarrow P_{n}\,,\ f\mapsto P(f)=\sum _{i=0}^{n}f(x_{i})l_{i}\,,}](/svg/f596df6bd695e74430cc8162ce321095ad9435c8.svg)
wobei  das
das  -te
Lagrange-Polynom
ist.
-te
Lagrange-Polynom
ist.
Als Lebesgue Konstante
wird die Operatornorm
von  bezeichnet. Dafür wird eine Norm benötigt und oft wird hier auf die Maximumsnorm
zugegriffen
bezeichnet. Dafür wird eine Norm benötigt und oft wird hier auf die Maximumsnorm
zugegriffen

Die Norm kann explizit evaluiert werden
![{\displaystyle \Lambda _{n}=\max _{x\in [a,b]}\sum _{i=0}^{n}|L_{i}(x)|\,.}](/svg/3e17d1bd19fcd33e0d786fb2bcbf32f96e008ada.svg)


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 02.11. 2021