Binärer Suchbaum
In der Informatik ist ein binärer Suchbaum eine Kombination der abstrakten Datenstrukturen Suchbaum und Binärbaum. Ein binärer Suchbaum, häufig abgekürzt als BST (von englisch Binary Search Tree), ist ein binärer Baum, bei dem die Knoten „Schlüssel“ tragen, und die Schlüssel des linken Teilbaums eines Knotens nur kleiner (oder gleich) und die des rechten Teilbaums nur größer (oder gleich) als der Schlüssel des Knotens selbst sind.
Was die Begriffe „kleiner gleich“ und „größer gleich“ bedeuten, ist völlig dem Anwender überlassen; sie müssen nur eine Totalordnung (genauer: eine totale Quasiordnung siehe unten) etablieren. Am flexibelsten wird die Ordnungsrelation durch eine vom Anwender zur Verfügung zu stellende 3-Wege-Vergleichsfunktion realisiert. Auch ob es sich um ein einziges Schlüsselfeld oder eine Kombination von Feldern handelt, ist Sache des Anwenders; ferner ob Duplikate (unterschiedliche Elemente, die beim Vergleich aber nicht als „ungleich“ herauskommen) zulässig sein sollen oder nicht. Über Suchfunktionen für diesen Fall siehe unten.
Ein in-order-Durchlauf durch einen binären Suchbaum ist äquivalent zum Wandern durch eine sortierte Liste (bei im Wesentlichen gleichem Laufzeitverhalten). Mit anderen Worten: ein binärer Suchbaum bietet ggf. wesentlich mehr Funktionalität (zum Beispiel Durchlauf in der Gegenrichtung und/oder einen „direkten Zugriff“ mit potentiell logarithmischem Laufzeitverhalten – erzielt durch das Prinzip „Teile und herrsche“, das auf der Fernwirkung des Transitivitätsgesetzes beruht) bei einem gleichen oder nur unwesentlich höheren Speicherbedarf.
Motivation
Suchbäume sind Lösungen des sogenannten „Wörterbuchproblems“. Angenommen ist eine große Anzahl von Schlüsseln, denen jeweils ein Wert beigegeben ist. In einem Wörterbuch deutsch–englisch ist das deutsche Wort der Schlüssel und englische Wörter sind der gesuchte Wert. Ähnlich verhält es sich bei einem Telefonbuch mit Namen und Adresse als Schlüssel und der Telefonnummer als dem gesuchten Wert.
Mathematisch gesehen realisiert ein Wörterbuch eine (endliche) Funktion mit Paaren (Schlüssel, Wert). Bei der Suche wird ein Suchbegriff (Argument der Funktion) mit einem der Schlüssel zur Deckung gebracht. Hat dies Erfolg, wird dem Suchbegriff der beigegebene Wert als Funktionswert zugeordnet.[1]
In beiden Beispielen sind üblicherweise die Schlüssel sortiert. Das ist sehr zweckmäßig, denn es erlaubt, das Buch in der Mitte aufzuschlagen und zu überprüfen, ob der Suchbegriff gefunden ist. Ist er nicht gefunden und liegt er beispielsweise alphabetisch vor dem Buchstaben »K«, weiß man zusätzlich, dass man nicht weiter hinten mit »L«, »M« oder »Z« vergleichen muss. Der zur Untersuchung übrig bleibende Teil ist immer ein zusammenhängendes Segment, welches wie das ganze Buch am Anfang wieder halbiert wird – und so weiter bis zum Fund oder bis festzustellen ist, dass der Suchbegriff nicht vorkommt.
Diese Vorgehensweise hat in der Informatik den Namen „binäres Suchen“. Sie wird auf naheliegende Weise durch das sehr bekannte Suchverfahren
„binäre Suche im
Array“ nachgebildet. Ihr Verhalten ist informationstheoretisch optimal,
nämlich logarithmisch,
genauer: Bei  Schlüsseln benötigt man maximal
Schlüsseln benötigt man maximal  (Abrundungsfunktion
und Aufrundungsfunktion) Vergleiche.
(Abrundungsfunktion
und Aufrundungsfunktion) Vergleiche.
Anders als beim binären Suchen muss beim „sequentiellen Suchen“ der
Suchbegriff potentiell mit allen Schlüsseln verglichen werden. (Dafür braucht
allerdings die Eingabe nicht sortiert zu sein.) Der Unterschied zwischen den
beiden Verfahren kann erheblich sein: In einem Telefonbuch mit  Einträgen, müssen beim sequentiellen Suchen im Mittel
Einträgen, müssen beim sequentiellen Suchen im Mittel  Vergleiche durchgeführt werden. Beim binären Suchen gelangt man nach maximal
Vergleiche durchgeführt werden. Beim binären Suchen gelangt man nach maximal
 Vergleichen zum selben Ergebnis.
Vergleichen zum selben Ergebnis.
Änderungen, Zugänge und Abgänge bei Wörter- und Telefonbüchern können
sporadisch, bei Softwaresystemen müssen sie in der Regel unmittelbar
reflektiert werden. Zugänge und Abgänge erfordern in einem Array
Datentransporte, deren Aufwand proportional zur Länge des Arrays, also
linear
in  ist. Ein solcher Aufwand macht die Effizienz des binären Suchens völlig
zunichte.
ist. Ein solcher Aufwand macht die Effizienz des binären Suchens völlig
zunichte.
Die Vorgehensweise beim binären Suchen lässt sich auch mit einem Binärbaum nachbilden. Der erste Schlüssel, mit dem der Suchbegriff zu vergleichen ist, wird in die Wurzel des Binärbaums platziert. Der beim Vergleichsergebnis »kleiner« aufzusuchende nächste Schlüssel wird in den linken Kindknoten platziert und entsprechend der Schlüssel für »größer« in den rechten Kindknoten. So fährt man fort, bis alle Schlüssel im Binärbaum untergebracht sind. (Dadurch wird der Binärbaum zu einem binären Suchbaum.)
Durch das Herauslösen der einzelnen Elemente aus dem Array wird große
Flexibilität gewonnen: Der Aufwand beim Einfügen für das Zuweisen von
Speicherplatz und Beschicken der Felder mit Werten sowie beim Löschen für
die Rückgabe
des Speicherplatzes ist unabhängig von der Anzahl
der Elemente. Verloren geht beim Binärbaum allerdings ein Maß für die
Balance, das beim Array durch das Bilden des Mittelwerts zwischen zwei
Indizes gegeben ist. Darüber hinaus kann ein Binärbaum, der einmal hervorragend
balanciert war, durch Einfügungen und Löschungen seine Balance verlieren und im
Extremfall, wenn nämlich jeder Knoten nur noch einen Kindknoten hat (statt
zwei), zu einer linearen Liste degenerieren – mit dem Ergebnis, dass eine Suche
einer sequentiellen Suche gleichkommt.
Die Informatiker haben verschiedene Balance-Kriterien für Binärbäume entwickelt. Bei den meisten sind die Aufwände für das Suchen, Einfügen und Löschen logarithmisch, wenn auch mit unterschiedlichen konstanten Faktoren. Einige Lösungsprinzipien zur Problematik der Entartung bei dynamischen Binärbäumen finden sich im
 und 13 Knoten, die Schlüssel tragen
und 13 Knoten, die Schlüssel tragen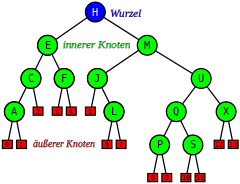
Wurzel
,
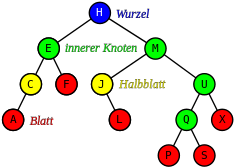
13 innere Knoten (grün und blau) und 14 äußere Knoten (rot); die inneren mit den
Schlüsseln der Abb. 1ATerminologie
Die Begriffe Knoten und Kante, letztere definitionsgemäß als gerichtete Kante (oder auch Bogen und Pfeil), werden von den allgemeinen Graphen übernommen. Wenn die Gerichtetheit aus dem Kontext klar genug hervorgeht, genügt Kante.
Bei gerichteten Graphen kann man einem Knoten sowohl Ausgangsgrad wie Eingangsgrad zuordnen. Üblicherweise werden Binärbäume als Out-Trees aufgefasst. In einem solchen gewurzelten Baum gibt es genau einen Knoten, der den Eingangsgrad 0 hat. Er wird als die Wurzel bezeichnet. Alle anderen Knoten haben den Eingangsgrad 1. Der Ausgangsgrad ist die Anzahl der Kindknoten und ist beim Binärbaum auf maximal 2 beschränkt. Damit ist seine Ordnung als Out-Tree ≤ 2.
Knoten mit Ausgangsgrad ≥ 1 bezeichnet man als interne (innere) Knoten, solche mit Ausgangsgrad 0 als Blätter oder externe (äußere) Knoten. Bei Binärbäumen – und nur dort – findet sich gelegentlich die Bezeichnung Halbblatt für einen Knoten mit Ausgangsgrad 1 (englisch manchmal: non-branching node). Dann ist ein Blatt ein doppeltes Halbblatt.
Unterschiedliche Sprechweisen
Den Knoten des Binärbaums in der Abb. 1A sind Schlüssel in Gestalt von Großbuchstaben zugeordnet. Da bei der in-order-Traversierung deren (alphabetische) Sortierordnung befolgt wird, ist der Baum ein binärer Suchbaum.
In der Abb. 1B ist die identische Schlüsselmenge in einem anderen
binären Suchbaum dargestellt, einem Suchbaum, der explizite „NIL-Knoten“ enthält.
Hier tragen nur die internen Knoten Schlüssel, wogegen die
externen, die NIL-Knoten (auch externe Blätter genannt), als
Platzhalter für die Intervalle zwischen den Schlüsseln (so beispielsweise in der
Abb.
3), also als Einfügepunkte
des binären Suchbaums fungieren. (Der Knoten mit dem Schlüssel  ist hier ein internes Blatt.) Knoten mit Ausgangsgrad 1 gibt es nicht.
Der schlüssellose Suchbaum besteht aus genau einem Knoten, der extern und Wurzel
zugleich ist. Da bei dieser Sichtweise die Höhe des (total) leeren Baums
(der kein Suchbaum ist) zu –1 definiert ist, somit dem schlüssellosen Baum die
Höhe 0 zukommt, stimmen die Höhenbegriffe
überein, wenn in der Sichtweise der Abb. 1A dem leeren und zugleich
schlüssellosen Baum die Höhe 0 und einem Baum, der nur aus einem Knoten besteht,
die Höhe 1 zugeteilt wird.[2]
ist hier ein internes Blatt.) Knoten mit Ausgangsgrad 1 gibt es nicht.
Der schlüssellose Suchbaum besteht aus genau einem Knoten, der extern und Wurzel
zugleich ist. Da bei dieser Sichtweise die Höhe des (total) leeren Baums
(der kein Suchbaum ist) zu –1 definiert ist, somit dem schlüssellosen Baum die
Höhe 0 zukommt, stimmen die Höhenbegriffe
überein, wenn in der Sichtweise der Abb. 1A dem leeren und zugleich
schlüssellosen Baum die Höhe 0 und einem Baum, der nur aus einem Knoten besteht,
die Höhe 1 zugeteilt wird.[2]
Knotenorientierte und blattorientierte Speicherung
Wenn – wie oben und in der Abb. 1A – die Inhalte der Menge in den Knoten abgespeichert werden und die externen Knoten leer sind, nennt man die Art der Speicherung knotenorientiert. Um auszudrücken, dass sie nicht zur Menge gehören, bezeichnet man in diesem Fall die externen Knoten zur besseren Unterscheidung als externe Blätter. Ein externes Blatt stellt einen Einfügepunkt dar.
Bei der blattorientierten Speicherung sind die Inhalte der Menge in den Blättern abgespeichert, und die Knoten stellen nur Hinweisschilder für die Navigation dar, die möglicherweise mit den Schlüsseln der Menge wenig zu tun haben.[3]
Begriffsklärung
Zur Beachtung:
- Der Begriff „Nachbar“ (und „Nachbarschaft“ etc.) wird in diesem Artikel (und bei den Suchbäumen generell) anders als sonst in der Graphentheorie verwendet, nämlich ausschließlich im Sinn der eingeprägten Ordnungsrelation: „rechter“ Nachbar meint den nächsten Knoten in aufsteigender Richtung, „linker“ in absteigender.
- Muss in diesem Artikel auf die Hierarchiestruktur des Baumes eingegangen werden, so werden Begriffe wie „Elter“ oder „Vorfahr“ bzw. „Kind“ oder „Nachfahr“ verwendet.
- Die hierarchische Anordnung der Knoten in der Baumstruktur des binären Suchbaums wird als sekundär und mehr oder minder zufällig angesehen – ganz im Vordergrund steht die korrekte Darstellung der Reihenfolge.
- Ähnlich sekundär ist die Frage, welcher Knoten gerade die Rolle der Wurzel spielt, insbesondere wenn es sich um einen selbst-balancierenden Baum handelt. Insofern eignet die Adresse der Wurzel sich nicht zur Identifizierung des Baumes.
- Dagegen kann die feste Adresse eines Zeigers zur Wurzel als Identifikation des Baumes genommen werden, dessen Zeigerwert dann aber auch von den Operationen des Baums zu pflegen ist.
Ordnungsrelation
Damit binäres Suchen, Sortieren etc. funktionieren kann, muss die
Ordnungsrelation eine totale
Quasiordnung, im Englischen „total preorder“, sein. Die Bezeichnungen
für die induzierte Duplikatrelation
 und die induzierte strenge
Halbordnung
und die induzierte strenge
Halbordnung  seien wie
dort.
seien wie
dort.
Die Trichotomie
einer entsprechenden 3-Wege-Vergleichsfunktion  [4]
– von ihrem Ergebnis ist nur das Vorzeichen
[4]
– von ihrem Ergebnis ist nur das Vorzeichen
 relevant – ergibt sich folgendermaßen:
relevant – ergibt sich folgendermaßen:

|
 , , |
falls  |
( kleiner als
kleiner als  ), ),
| |
 , , |
falls  |
(
Duplikat von ),
| ||
 , , |
falls  |
(
größer als ).
|
Nach Vertauschung von
und
und einer Umordnung erkennt man, dass
 .
.
Die induzierte Ordnungsrelation
ist eine strenge
schwache Ordnung, im Englischen strict weak ordering. Sie
induziert auf den Äquivalenzklassen
dieser Relation, genauer: den Äquivalenzklassen der Duplikatrelation, eine strenge
Totalordnung.
Offensichtlich lässt sich jede solche Ordnung spiegeln, d.h.
mit
vertauschen, das Ergebnis ist wieder eine strenge schwache Ordnung.
Nachbarschaftsbeziehungen bleiben bestehen, es wird nur „größer“ mit „kleiner“
bzw. „rechts“ mit „links“ vertauscht.
Anmerkungen:
- Zum reinen Aufsuchen genügt im Grunde eine 2-Wege-Vergleichsfunktion, die angibt, ob zwei „Schlüssel“ gleich sind oder nicht. Mit einer solchen Vergleichsfunktion sind aber effiziente, zum Beispiel im Mittel logarithmische, Suchzeiten nicht erreichbar.
- Für das Funktionieren des Sortierens und binären Suchens ist es unerheblich, ob das Aufspalten des Ungleich-Weges einer 2-Wege-Vergleichsfunktion in einen Kleiner- und einen Größer-Weg ein Artefakt ist, wie zum Beispiel die Anordnung der Buchstaben in einem Alphabet, oder ob eine Näher-/Ferner- oder logische Beziehung (mit) im Spiel ist.
- Spiegelt die Ordnungsrelation auch Nachbarschaft wider, kann diese für ein effizientes „unscharfes Suchen“ ausgenutzt werden.
- Die knotenorientierte Speicherung passt exakt zur Suche mit der 3-Wege-Vergleichsfunktion.
- Wie im folgenden Abschnitt „Suchen“ näher ausgeführt, ist die Behandlung von Duplikaten unabhängig davon, ob die Ordnungsrelation Duplikate zulässt (totale Quasiordnung bzw. strenge schwache Ordnung) oder nicht (Totalordnung bzw. strenge Totalordnung). Einerseits kann es unerwünscht sein, auch wenn sie Duplikate zulässt, diese im Baum zu haben. Andererseits kann es durchaus angebracht sein, auch bei einer Totalordnung Duplikate in den Baum aufzunehmen, zum Beispiel aus dem Eingabestrom. Es kommt in der praktischen Anwendung also nur darauf an, ob es im Baum Duplikate geben soll oder nicht. Konsequenterweise wird hier von vornherein von totalen Quasiordnungen ausgegangen.
Suchen
Die Suche nach einem Eintrag verläuft derart, dass der Suchschlüssel zunächst mit dem Schlüssel der Wurzel verglichen wird. Sind beide gleich, so ist der Eintrag (oder ein Duplikat) gefunden.
Andernfalls (bei „ungleich“) wird überprüft, ob der Suchschlüssel kleiner (größer) ist als der Schlüssel im Knoten: dann wird die Suche rekursiv im linken (rechten) Teilbaum der Wurzel fortgeführt; gibt es keinen linken (rechten) Teilbaum, so existiert der gesuchte Eintrag im binären Suchbaum nicht.
Der auf diese Weise erhaltene finale „ungleich“-Knoten stellt zusammen mit der letzten Vergleichsrichtung den sog. Einfügepunkt für das gesuchte Element dar. (In der Sichtweise der Abb. 1B genügt der externe Knoten, der die Richtung mitenthält.) Wird es hier eingefügt, dann stimmt die in-order- mit der Sortier-Reihenfolge überein. Der finale „ungleich“-Knoten hat einen Schlüssel, der entweder der kleinste unter den größeren ist oder der größte unter den kleineren. Dasselbe gilt spiegelbildlich für seinen Nachbarknoten in der letzten Vergleichsrichtung, sofern es einen solchen gibt. (Allerdings ist dieser kein „Einfügepunkt“, sondern ein Vorfahr desselben.)
Suchen ohne Duplikate (rekursiv)
Der folgende Pseudocode Find illustriert die Arbeitsweise des Algorithmus für eine Suche, bei der in keinem Fall Duplikate in den Baum aufgenommen werden sollen. (Das ist letztlich unabhängig davon, ob die Ordnungsrelation Duplikate zulässt oder nicht.)
Die Funktion gibt einen Knoten und ein Vergleichsergebnis zurück. Dieses Paar stellt – außer beim Vergleichsergebnis „Equal“ – einen Einfügepunkt dar.
Find(t, s) {
t: binärerSuchbaum
s: Suchschlüssel
return Find0(t, s, t.root, Empty)
// zurück kommt ein Knoten und ein Vergleichsergebnis
}
Find0(t, s, x, d) {
t: Teilbaum
s: Suchschlüssel
x: Knoten
d: Vergleichsergebnis (Equal, LessThan, GreaterThan oder Empty)
if x ≠ null then {
if s = x.key then return (x, Equal) // Suchschlüssel s gefunden
if s < x.key
then return Find0(x, s, x.left, LessThan)
else return Find0(x, s, x.right, GreaterThan)
}
return (t, d) // Suchschlüssel s nicht gefunden
// zurück kommt (Knoten,Vergleichsergebnis) oder (Baum,Empty)
}
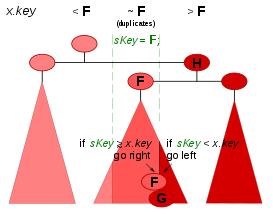
Bei dem in der Abb. 2 gewählten Beispiel würde Find beim Suchschlüssel s = 'F' den ersten Treffer, das obere 'F', als Ergebnis zurückgeben.
Suchen ohne Duplikate (iterativ und mit Sentinel)
Die folgende Funktion FindWithSentinel hat genau dieselbe
Funktionalität wie das obenstehende Find. Der Trick mit dem Wächterknoten
oder Sentinel erspart pro Iterationsschritt eine Abfrage, und zwar die auf
Abwesenheit des Kindknotens,[5]
also  (=Höhe) Abfragen. Sie wird hier iterativ programmiert in der Programmiersprache C vorgestellt.
(=Höhe) Abfragen. Sie wird hier iterativ programmiert in der Programmiersprache C vorgestellt.
Bemerkung: Da beim Ergebnis »gefunden« der Knoten, beim Ergebnis »nicht gefunden« aber der letzte Elterknoten gebraucht wird, kommen in der heißen Schleife zwei Variable alternierend zum Einsatz.
typedef struct NODE { // Knoten des binären Suchbaums
Node* lChild; // -> linker Kindknoten
Node* rChild; // -> rechter Kindknoten
int key; // Schlüssel
} Node;
typedef struct RESULT { // Ergebnisstruktur mit zwei Feldern
Node* resNod; // -> Ergebnisknoten
int resDir; // Vergleichsergebnis (Equal, LessThan, GreaterThan oder Empty)
} Result;
typedef struct BinarySearchTree { // Der binäre Suchbaum
Node* root; // -> Wurzel des Baums
} Bst;
Bst bst;
Node Sentinel, *sentinel = &Sentinel; // Der Wächterknoten und sein Zeiger
Sentinel.lChild = sentinel; Sentinel.rChild = sentinel;
// Initialisierung des leeren binären Suchbaums:
bst.root = sentinel; // Indikator, dass die Wurzel .root fehlt.
// Dieser Zeiger ist auch von den Einfüge- oder Löschfunktionen
// an den Stellen zu verwenden, wo es einen Kindknoten nicht gibt.
int FindWithSentinel(
Bst* t, // -> binärer Suchbaum
int sKey, // der Suchschlüssel
Result *r) // -> Ergebnisstruktur
{ Node *x, *y;
sentinel->key = sKey; // präpariere den Wächterknoten Sentinel
y = (Node*)t; // »Elter« der Wurzel
// Suchschleife:
for (x = t->root; sKey != x->key; ) {
if (sKey < x->key)
y = x->lChild; // ein echter oder der Wächter-Knoten
else
y = x->rChild; // dito
if (sKey == y->key) { // Schlüsselgleichheit
r->resNod = y; // Ergebnisknoten
goto Epilog;
}
if (sKey < y->key)
x = y->lChild; // dito
else
x = y->rChild; // dito
}
// Abbruch-Bedingung Schlüsselgleichheit: sKey == x->key
r->resNod = x;
x = y; // Elterknoten von r->resNod
Epilog:
if (r->resNod != sentinel) { // Der Ergebnisknoten r->resNod ist echt
// und zeigt auf einen Schlüssel mit Wert sKey.
r->resDir = Equal;
}
else { // Der Ergebnisknoten r->resNod ist unecht.
// x ist der »Elter« von r->resNod
r->resNod = x; // -> Ergebnisknoten (->Node oder ->Bst)
if (x != (Node*)t) { // x ist ein echter Knoten (->Node)
if (sKey < x->key) {
r->resDir = LessThan;
else
r->resDir = GreaterThan;
}
else // x ist der Baum (->Bst)
r->resDir = Empty;
}
return r->resDir;
// *r enthält (->Node,Vergleichsergebnis) oder (->Bst,Empty)
}
Suchen, wenn Duplikate zulässig
Sollen Einträge von Duplikaten in den Baum zugelassen sein, ist es vorteilhaft, die Suche nicht beim ersten besten gefundenen Knoten abzubrechen, sondern entweder auf der kleineren oder auf der größeren Seite bis zu den Blättern weiter zu suchen. Dies unterstützt eine gezielte Einfügung von Duplikaten und ist insbesondere dann interessant, wenn im Suchbaum nicht nur gesucht und gefunden werden soll, sondern u.U. auch traversiert wird. Der Einsatz der nachfolgenden Suchfunktionen beim Sortierverfahren Binary Tree Sort macht dieses Verfahren zu einem „stabilen“.
Beim folgenden Pseudocode
FindDupGE gibt der Benutzer die Richtung rechts vor, auf
welcher Seite der Duplikate ein ggf. neues eingefügt werden soll. Bei einer
Funktion FindDupLE mit dem gespiegelten Vergleich if s
≤ x.key würde ein neues Duplikat links von allen vorhandenen
Duplikaten eingefügt werden.
FindDupGE(t, s, c) {
t: binärerSuchbaum
s: Suchschlüssel // FindDupGE: falls s ein Duplikat ist,
// soll es rechts (GE:≥) eingefügt werden.
c: Cursor { // Dieser Cursor enthält am Ende:
c.d: Richtung // (1) Left, Right oder Empty
c.n: Knoten // (2) Knoten oder Baum (nur bei Empty)
}
c.n = t // Für den leeren Baum
return FindDupGE0(t.root, s, c, Empty)
// zurück kommt ein Einfügepunkt im Cursor c
}
FindDupGE0(x, s, c, d) {
x: Knoten
s: Suchschlüssel
c: Cursor
d: Richtung
if x ≠ null then {
c.n = x
if s ≥ x.key // Suchschlüssel s ≥ Knoten.Schlüssel?
then return FindDupGE0(x.right, s, c, Right) // ≥ (GE)
else return FindDupGE0(x.left, s, c, Left) // <
}
c.d = d // Setzen Einfüge-Richtung
return c
// zurück kommt ein Einfügepunkt im Cursor c
}
Das Paar (Knoten, Richtung) des vorigen Beispiels
Find ist hier zu dem einen Objekt, genannt
Cursor, zusammengefasst. Es ist ein reiner Ausgabeparameter, der
den Einfügepunkt spezifiziert.
FindDupGE ist so gehalten, dass im Ergebnis-Cursor immer
ein unmittelbarer Einfügepunkt
geliefert wird. Aus dem Ergebnis ist aber nicht ohne Weiteres erkennbar, ob es
sich um ein Duplikat handelt, da der Einfügepunkt nicht den gesuchten
Schlüssel haben muss, selbst wenn dieser im Baum vorkommt. Dies hängt von der
mehr oder minder zufälligen Anordnung der Knoten im Baum ab. Ist nämlich das
rechteste Duplikat (im Beispiel der Abb. 2 das untere rechte 'F') kein Halbblatt
nach rechts, dann ist es in der Hierarchie des Binärbaums ein Vorfahr seines
rechten Nachbarn (im Beispiel 'G'), der nun ein Halbblatt nach links ist und
zusammen mit der Richtung „links“ denselben Einfügepunkt spezifiziert und
also in diesem Fall das Resultat von FindDupGE darstellt.
Während bei Find alle 3 Wege der Vergleichsfunktion
abgefragt werden, begnügt sich FindDupGE mit der Abfrage von deren
2[6].
Der nachfolgende Pseudocode
FindDup kombiniert die Fähigkeiten von Find und
FindDupGE, indem er sowohl ein Ergebnis über das Vorhandensein
eines Suchschlüssels als auch einen Einfügepunkt für Duplikate liefert. Hierzu
gibt der Benutzer eine Richtung d (links oder rechts) vor, auf
welcher Seite der Duplikate ein ggf. neues eingefügt werden soll. Als Ergebnis
kommt ein Paar (Knoten, Cursor) zurück, wobei
Knoten angibt, ob und wo der Suchschlüssel gefunden wurde.
Der Vorschlag baut beispielhaft ein Objekt auf, das (in Analogie zum Beispiel
zu den Datenbanken)
Cursor
genannt wird. Der #Cursor
enthält den ganzen Pfad vom Ergebnisknoten bis zur Wurzel. Damit passt er zur
nachfolgenden in-order-Traversierfunktion Next, eine Version, die
ohne Zeiger zum Elterknoten auskommt. Die passende Datenstruktur für den
Pfad ist der Stapelspeicher,
engl. Stack, mit den Operationen push und pop.
Der etwas einfacheren Version der Funktion, bei der ein Zeiger zum Elter in
jedem Knoten vorausgesetzt wird und deshalb der Cursor ohne Stack auskommt,
entfallen die push- und clear-Aufrufe. Der
Speicherbedarf für den Baum erhöht sich allerdings um einen Zeiger pro Knoten.
FindDup(t, s, c, d) {
t: binärerSuchbaum
s: Suchschlüssel
c: Cursor { // Dieser Cursor enthält am Ende:
c.d: Richtung // (1) Left, Right oder Empty
c.n: Knoten // (2) Knoten oder Baum (nur bei Empty)
// Die folgenden 2 nur, wenn die Elterknoten fehlen:
c.t: Baum // (3) Baum (enthält den Zeiger zur Wurzel)
c.p: Pfad // (4) Pfad vom Elter des Knotens zur Wurzel
}
d: Richtung // Falls s ein Duplikat ist, soll es ...
c.d = d // … auf dieser Seite eingefügt werden. c.t = t // initialisiere den Cursor clear(c.p) // initialisiere den Stack c.n = t // für den leeren Baum return FindDup0(t.root, s, c, Empty) // zurück kommt ein Knoten und ein Einfügepunkt im Cursor c }
FindDup0(x, s, c, d) {
x: Knoten
s: Suchschlüssel
c: Cursor
d: Richtung
if x ≠ null then {
push(c.p, c.n) // Elter c.n von x in den Stack
c.n = x // setze neuen Knoten im Cursor
if s = x.key then return FindDup1(x, s, c, c.d)
if s < x.key
then return FindDup0(x.left, s, c, Left)
else return FindDup0(x.right, s, c, Right)
}
c.d = d // Setzen Einfüge-Richtung
return (null, c) // Suchschlüssel s nicht gefunden
// zurück kommt null und ein Einfügepunkt im Cursor c
}
FindDup1(q, s, c, d) {
q: Knoten // letzter Knoten mit Equal
s: Suchschlüssel
c: Cursor
d: Richtung
x: Knoten
x = c.n.child[d]
if x ≠ null then {
push(c.p, c.n) // Elter c.n von x in den Stack
c.n = x // setze neuen Knoten im Cursor
if s = x.key
then return FindDup1(x, s, c, c.d) // x ist neuer Knoten mit Equal
else return FindDup1(q, s, c, 1 - c.d) // bei ≠ weiter in der Gegen-Richtung
}
c.d = d // Setzen Einfüge-Richtung
return (q, c)
// zurück kommt ein Duplikat und ein Einfügepunkt im Cursor c
}
FindDup ist so gehalten, dass im Ergebnis-Cursor immer
ein unmittelbarer Einfügepunkt
geliefert wird. Wenn der Suchschlüssel nicht gefunden wurde, wird im Feld Knoten
der Nullzeiger
zurückgegeben. Wenn der Suchschlüssel gefunden wurde, gibt FindDup
das linkeste oder rechteste Duplikat, im Beispiel der Abb. 2 das rechteste
Duplikat 'F', als gefundenen Knoten zurück. Der Einfügepunkt kann mit dem
gefundenen Knoten zusammenfallen; er kann aber auch sein unmittelbarer (im
Beispiel der Abb. rechter) Nachbar sein, in welchem Fall er einen anderen
Schlüssel (im Beispiel 'G') hat.
Im ersten Teil, FindDup0, werden alle 3 Wege der Vergleichsfunktion
abgefragt; im zweiten Teil, FindDup1, wenn das Vorhandensein des
Suchschlüssels positiv geklärt ist, nur noch deren 2.
Komplexität
Da die Suchoperation entlang eines Weges von der Wurzel zu einem Blatt
verläuft, hängt die aufgewendete Zeit im Mittel und im schlechtesten Fall linear
von der Höhe  des Suchbaums ab (Komplexität
des Suchbaums ab (Komplexität
 );
im asymptotisch
vernachlässigbaren besten Fall ist die Laufzeit bei
);
im asymptotisch
vernachlässigbaren besten Fall ist die Laufzeit bei Find
konstant, bei FindDupGE und FindDup jedoch
immer 
Die Höhe
ist im entarteten Fall so groß wie die Anzahl der vorhanden Elemente
.
Beim Aufbau eines Baumes, was einem Sortierlauf entspricht, muss im Extremfall
jedes Element mit jedem verglichen werden – ergibt in summa  Vergleiche.
Vergleiche.
Gewichtsbalancierte
Suchbäume können im Mittel auf konstante Laufzeit kommen, verhalten sich
jedoch linear im schlechtesten Fall. Höhen-balancierte
Suchbäume haben eine Höhe von  und ermöglichen so die Suche in garantiert logarithmischer
Laufzeit.
Der Aufbau eines Baumes kommt dann auf
und ermöglichen so die Suche in garantiert logarithmischer
Laufzeit.
Der Aufbau eines Baumes kommt dann auf  Vergleiche – das entspricht den besten Sortieralgorithmen.
Vergleiche – das entspricht den besten Sortieralgorithmen.
Logarithmische Höhe gilt sogar im Durchschnitt für zufällig erzeugte Suchbäume, wenn die folgenden Bedingungen erfüllt sind:
- Alle Permutationen der einzufügenden und zu löschenden Elemente sind gleich wahrscheinlich.
- Bei Modifikationen des Baumes wird auf „asymmetrische“ Löschoperation verzichtet, d.h. die Abstiege bei den Löschungen nach links und die nach rechts halten sich im Mittel die Waage.
Suchtiefen und Pfadlängensummen
Sei  eine Schlüsselmenge aus einem total
geordneten Reservoir
eine Schlüsselmenge aus einem total
geordneten Reservoir  von Schlüsseln, seien ferner
von Schlüsseln, seien ferner  bzw.
bzw.  Häufigkeiten, mit denen auf das Element
Häufigkeiten, mit denen auf das Element  zugegriffen wird, wobei
zugegriffen wird, wobei  für
für  resp.
resp.  für
für  .
(Dabei seien
.
(Dabei seien  und
und  zusätzliche nicht zu
gehörende Elemente mit der üblichen Bedeutung.) Das
zusätzliche nicht zu
gehörende Elemente mit der üblichen Bedeutung.) Das  -Tupel
-Tupel

heißt Zugriffsverteilung[7]
für die Menge  ,
wenn alle
,
wenn alle  sind.
sind.  wird zur Zugriffswahrscheinlichkeitsverteilung, wenn
wird zur Zugriffswahrscheinlichkeitsverteilung, wenn  ist.
ist.
Sei nun  ein Suchbaum für die Menge
mit einer Zugriffsverteilung ,
ferner sei
ein Suchbaum für die Menge
mit einer Zugriffsverteilung ,
ferner sei  die Tiefe
des (inneren) Knotens
die Tiefe
des (inneren) Knotens  und
und  die Tiefe des (externen) Blattes
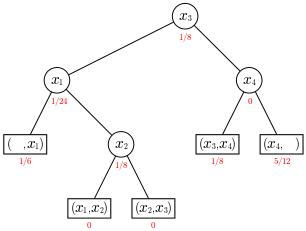
die Tiefe des (externen) Blattes  (s. Abb. 3; jeweils #Terminologie
der Abb. 1B). Wir betrachten die Suche nach einem Element .
Wenn ,
dann vergleichen wir
mit
(s. Abb. 3; jeweils #Terminologie
der Abb. 1B). Wir betrachten die Suche nach einem Element .
Wenn ,
dann vergleichen wir
mit  Elementen im Baum. Wenn ,
dann vergleichen wir
mit Elementen
im Baum. Also ist
Elementen im Baum. Wenn ,
dann vergleichen wir
mit Elementen
im Baum. Also ist

die (mit der Zugriffsverteilung )
gewichtete Pfadlängensumme des Baumes ;
ist
eine Wahrscheinlichkeitsverteilung, dann ist  die gewichtete Pfadlänge, die gewichtete Suchtiefe oder die
mittlere Anzahl der benötigten Vergleiche. Die Abb. 3 zeigt einen Suchbaum ,
der mit einem Wert von
die gewichtete Pfadlänge, die gewichtete Suchtiefe oder die
mittlere Anzahl der benötigten Vergleiche. Die Abb. 3 zeigt einen Suchbaum ,
der mit einem Wert von  optimal für die Zugriffsverteilung
optimal für die Zugriffsverteilung  ist.
ist.
Sind alle  und alle
und alle  ,
dann ist
,
dann ist  mit
mit  die Summe der erforderlichen Vergleiche, wenn ein jeder der
Knoten gesucht wird (
die Summe der erforderlichen Vergleiche, wenn ein jeder der
Knoten gesucht wird ( für erfolgreiche Suche). Sie steht zur so genannten internen
Pfadlänge
für erfolgreiche Suche). Sie steht zur so genannten internen
Pfadlänge  [8]
in der Beziehung
[8]
in der Beziehung
 .
.
Für alle binären Suchbäume
ist:
 ,
,
wobei die obere Grenze von der linearen Kette kommt und die untere  von den vollständig
balancierten Binärbäumen. Die Funktion
ist stückweise linear,
streng
monoton steigend und konvex
nach unten; in Formeln: Ist
von den vollständig
balancierten Binärbäumen. Die Funktion
ist stückweise linear,
streng
monoton steigend und konvex
nach unten; in Formeln: Ist  mit
mit  ,
dann ist
,
dann ist  .
.
Übrigens ist  mit der Folge
mit der Folge ![]() A001855
in OEIS.
A001855
in OEIS.
Sind dagegen alle  und alle
und alle  ,
dann ist
,
dann ist  mit
mit  die Summe der notwendigen Vergleiche, um alle
die Summe der notwendigen Vergleiche, um alle  Blätter aufzusuchen (
Blätter aufzusuchen ( für fehlend).
wird auch als externe Pfadlänge
für fehlend).
wird auch als externe Pfadlänge  [9]
bezeichnet:
[9]
bezeichnet:
 .
.
Es gilt für alle Bäume :
 .[10]
.[10]
- Beweis
Die Behauptung ist richtig für  .
.
Sei
ein Baum mit
Knoten. Bei einem Knoten auf der Höhe
fügen wir eine neue Kante und einen neuen Knoten hinzu.
erhöht sich um  und
um
und
um  ,
also wächst die Differenz
,
also wächst die Differenz  um
um  .
■
.
■
Die vollständig balancierten Binärbäume sind auch für die Zugriffsverteilung
optimal, und es gilt für alle binären Suchbäume :

mit  .
.
Übrigens ist  mit der Folge
mit der Folge ![]() A003314
in OEIS,
und
ist die Anzahl der externen Knoten (Blätter).
A003314
in OEIS,
und
ist die Anzahl der externen Knoten (Blätter).
Traversierung
Traversierung (Querung) bezeichnet das systematische Erforschen der Knoten des Baumes in einer bestimmten Reihenfolge.
Es gibt verschiedene Möglichkeiten, die Knoten von Binärbäumen zu durchlaufen. Beim binären Suchbaum sind jedoch die sog. in-order- oder reverse in-order-Traversierungen die eindeutig bevorzugten, da sie die eingeprägte Ordnungsrelation wiedergeben.
In der Literatur finden sich fast ausschließlich (rekursive)
Implementierungen, die nur über den ganzen Baum laufen – Beispiele in Binärbaum#Rekursive
Implementierungen. Die Aktionen, die an den einzelnen Knoten auszuführen
sind, sind dann in einer sog. Rückruffunktion
(dort: callback) zu programmieren.
Eine Einzel-Traversierung, wie im nachstehenden Abschnitt vorgeschlagen, ist in der Praxis wesentlich flexibler einsetzbar.
Traversierung (Einzelschritt)
Der folgende Pseudocode Next gibt ausgehend von einem Knoten das
nächste Element in ab- oder aufsteigender Reihenfolge zurück – eine iterative
Implementierung. Der Vorschlag kommt ohne Zeiger zum Elterknoten aus. Dafür muss
das Eingabeobjekt, hier #Cursor
genannt, den ganzen Pfad vom aktuellen Knoten bis zur Wurzel enthalten, und
dieser muss von der Next-Funktion auch entsprechend
gepflegt werden, wenn Next in einer Schleife verwendet wird. Die
passende Datenstruktur
für den Pfad ist der Stapelspeicher,
engl. Stack, mit den Operationen push und pop.
Die etwas einfachere Version der Funktion, bei der ein Zeiger zum Elter in jedem Knoten vorausgesetzt wird und deshalb der Cursor ohne Stack auskommt, ist beim Binärbaum aufgeführt. Der Speicherbedarf für den Baum erhöht sich allerdings um einen festen Prozentsatz.
Bei einer längeren Traversierung (mehreren Aufrufen von Next)
wechseln sich Halbblätter
und höherrangige Vorfahren ab.
Next(c) {
c: Cursor { // Dieser Cursor enthält:
c.d: Richtung // (1) EndOfTree oder Left, Right
c.n: Knoten // (2) Baum (nur bei EndOfTree) oder Knoten
c.t: Baum // (3) Baum (enthält den Zeiger zur Wurzel)
c.p: Pfad // (4) Pfad vom Elter des Knotens zur Wurzel
}
x,y: Knoten
x = c.n // Ausgangsknoten dieses Einzelschritts
d = c.d // gewünschte Richtung der Traversierung
y = x.child[d]
if y ≠ null then { // 1 Schritt in die gegebene Richtung
push(c.p, x) // Elter x von y in den Stack
d = 1 - d // spiegele Left <-> Right
// Abstieg in Richtung Blätter über Kinder in der gespiegelten Richtung
x = y.child[d]
while x ≠ null do {
push(c.p, y) // Elter y von x in den Stack
y = x
x = y.child[d]
}
c.n = y // Ergebnis: das nächste Halbblatt in Richtung c.d
return c // (Es ist Halbblatt auf seiner (1-c.d)-Seite.)
}
// Am Anschlag, deshalb Aufstieg zur Wurzel über die Vorfahren in der ...
do { // … c.d-„Linie“ (nur linke oder nur rechte)
y = x
x = pop(c.p) // Elter von y aus dem Stack
if x = c.t then { // y ist die Wurzel.
// Somit gibt es kein Element mehr in dieser Richtung.
c.n = c.t // Ergebnis: der Baum als Elter der Wurzel
c.d = EndOfTree // signalisiere das Ende der Traversierung
return c
}
} until y ≠ x.child[d]
// Es gab beim Aufsteigen einen Richtungswechsel:
c.n = x // Ergebnis: der erste Vorfahr in der gespiegelten Richtung
return c
}
Die Traversierung über den ganzen Baum umfasst pro Kante einen
Abstieg und einen Aufstieg; der Aufwand bei
Knoten ist also  .
Daher ist der Aufwand für eine Einzel-Traversierung im Mittel und
amortisiert
konstant und im schlechtesten Fall in O(h)
mit h als der Höhe des Baums.
.
Daher ist der Aufwand für eine Einzel-Traversierung im Mittel und
amortisiert
konstant und im schlechtesten Fall in O(h)
mit h als der Höhe des Baums.
Ob die Abfrage auf Anwesenheit des Kindknotens als (x ≠ null)
oder mit einem Wächterknoten (s. Abschnitt #Suchen
ohne Duplikate (iterativ und mit Sentinel)) geschieht, macht keinen
Unterschied – weder funktionell noch laufzeitmäßig. Da bei der Traversierung
immer mit der Adresse x eines Knotens verglichen wird, ist
durch die Präparation eines Wächterknotens mit einem Wert auch kein
Vorteil zu erwarten.
Proximitäts-Suche
Jede Suchfunktion lässt sich mit der oben gezeigten Einzelschritt-Traversierung zu einer „Proximitäts“-Suche (engl. approximate match) kombinieren. Das ist eine Suche in der Nähe eines bestimmten Schlüssels, zum Beispiel auf „größer gleich“ (bzw. „kleiner gleich“).
Die obigen Suchfunktionen Find, FindDupGE und
FindDup liefern im „ungleich“-Fall einen Einfügepunkt.
Dieser enthält, wenn der Baum nicht leer ist, ein Element, das entweder das
kleinste unter den größeren ist oder das größte unter den kleineren. Im ersteren
Fall kann der Wunsch „größer gleich“ direkt befriedigt werden. Im letzteren Fall
geht man zum nächsten Element in aufsteigender Reihenfolge, wenn es noch eines
gibt, und gibt dieses zurück, denn es muss ein größeres sein. Die Logik für die
gespiegelte Version liegt auf der Hand.
Ähnliche Funktionalität hat die Index Sequential Access Method.
Ein wichtiger Anwendungsfall ist die Abbildung mehrerer linear sortierter Schlüssel auf eine einzige lineare Ordnung mithilfe einer raumfüllenden Kurve, bspw. des Hilbert-Index. Hier ist möglicherweise die schlechtere Treffsicherheit des so gebildeten Schlüssels durch gute Nachbarschaftseigenschaften auszugleichen.
Einfügen
Es sei angenommen, dass die Navigation zum Einfügepunkt bereits erledigt ist.
Einfügepunkt bedeutet einen Knoten und eine Richtung (rechts bzw. links). Ein
unmittelbarer Einfügepunkt in einem binären Baum ist immer ein rechtes
(bzw. linkes) Halbblatt (d. i. ein Knoten ohne rechten (bzw. linken) Kindknoten)
zusammen mit dieser Richtung. (In der Sichtweise der Abb. 1B entspricht dies
genau einem externen Knoten, deren Adressen sich dann aber alle verschieden sein
müssen und die bspw. nicht als Sentinel
implementiert sein dürfen.) Ein mittelbarer ist der unmittelbare Nachbar
in der angegebenen Richtung und spezifiziert zusammen mit der Gegenrichtung
dieselbe Stelle im Binärbaum – zum echten Einfügen muss aber die Einfügefunktion
noch bis zu dem Halbblatt hinabsteigen, welches den unmittelbaren Einfügepunkt
darstellt. Die obigen Funktionen Find, FindDupGE und
FindDup liefern als Ergebnis einen (unmittelbaren) Einfügepunkt
(Find nicht bei „Equal“).
Zum Einfügen lässt man den unmittelbaren Einfügepunkt (das Kind in der entsprechenden Richtung) auf das neue Element zeigen, damit ist dieses korrekt entsprechend der totalen Quasiordnung eingefügt. Die Komplexität der Einfügeoperation (ohne Suchvorgang) ist somit konstant. Wird eine Suchoperation hinzugerechnet (wie sehr häufig in der Literatur), dominiert diese die Komplexität.
Nach dem Einfügen ist das neue Element ein Blatt des Suchbaums.
Durch wiederholtes Einfügen von aufsteigend (oder absteigend) sortierten Schlüsseln kann es dazu kommen, dass der Baum zu einer linearen Liste entartet.
Löschen
Wie im Abschnitt Löschen des Artikels Binärbaum ausgeführt, gibt es verschiedene Möglichkeiten, einen Knoten aus einem binären Baum unter Erhaltung der bisherigen in-order-Reihenfolge zu entfernen. Da bei den Suchbäumen diese mit der Suchordnung zusammenfällt, bietet sich die folgende von T. Hibbard im Jahr 1962 vorgeschlagene Vorgehensweise an, die besonders geringe Änderungen an den Höhen der Teilbäume sicherstellt.
Der zu löschende Knoten sei mit  bezeichnet.
bezeichnet.
- Hat
zwei Kinder, gehe zu Schritt 4. Andernfalls ist
ein Blatt oder hat nur ein einziges Kind. Dieses sei mit
 bezeichnet.
bezeichnet. - War
die Wurzel, dann wird
zur neuen Wurzel.
Fertig! - Andernfalls setze
 Elter
Elter und mache
an s
Stelle und Kindesrichtung zum Kind von
und mache
an s
Stelle und Kindesrichtung zum Kind von  .
Ist
ein Knoten, wird
zum neuen Elter von .
.
Ist
ein Knoten, wird
zum neuen Elter von .
Fertig!
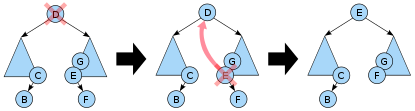 Abb. 4: Löschen eines Knotens
mit 2 Kindknoten vermöge des rechten in-order-Nachfolgers
Abb. 4: Löschen eines Knotens
mit 2 Kindknoten vermöge des rechten in-order-Nachfolgers  von ,
des linkesten Knotens im rechten Kindbaum.
von ,
des linkesten Knotens im rechten Kindbaum. - Hat
zwei Kinder, navigiere im rechten Kindbaum von
zum linkesten Knoten .
Er ist der in-order-Nachfolger von
und kann kein linkes Kind haben.[11]
- Setze
Elter
 und
und  Kindesrichtung,
die links ist, wenn
Kindesrichtung,
die links ist, wenn  ,
sonst rechts.
,
sonst rechts. - Kopiere Schlüssel und Daten von
in den Knoten .[12]
- Setze
 rechtesKind.
Es kann fehlen. Mache
(an s
Stelle) zum
rechtesKind.
Es kann fehlen. Mache
(an s
Stelle) zum  -Kind
-Kind .
Ist
ein Knoten, wird
neuer Elter von .
.
Ist
ein Knoten, wird
neuer Elter von .
- Fazit
- In einem binären Suchbaum, wo es im Baum nur auf die (in-order-)Reihenfolge ankommt, kann man beim Löschen den Zielknoten mit einem (seiner maximal zwei) in-order-Nachbarknoten vertauschen und, was die Baumstruktur mit ihren Zeigern etc. betrifft, diesen statt jenen aus dem Baum entfernen. Einer von beiden, der Zielknoten oder der Nachbarknoten, hat höchstens ein Kind.
Die Höhe von -Kind
verringert sich um  von
von  auf
auf  ,
wenn
die Höhe von
ist.
,
wenn
die Höhe von
ist.
Durch wiederholtes Löschen kann es dazu kommen, dass der Baum zu einer linearen Liste entartet.
Wegen der unvermeidlichen Abstiege bis zu den Halbblättern ist die Komplexität
der Löschoperation im schlechtesten Fall ,
wobei
die Höhe des Baumes ist.
Sind Duplikate im Baum zugelassen, dann schlägt Mehlhorn vor, Elemente mit gleichem Schlüssel in der Last In – First Out-Disziplin abzuräumen.[13]
Implementierung
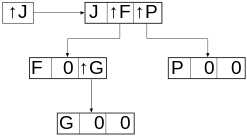
Die Abb. zeigt eine naheliegende Art der Speicherung. Sie entspricht in etwa den C-Strukturen:
struct node { // 1 Objekt = 1 Knoten
char key;
struct node * Kind_links;
struct node * Kind_rechts;
} object;
struct node * Kopf; // Zeiger auf die Wurzel
Zur besseren Unterscheidung der Objekte sind diese beziehentlich mit den
Schlüsseln ,
,
 und
und  versehen. Diese Schlüssel sind auch der Einfachheit halber als Ziel der Verweise
genommen worden (anstelle von echten Speicheradressen).
Wie üblich soll ein Zeigerwert
0 ausdrücken, dass auf kein Objekt verwiesen wird, es also kein Kind an
dieser Stelle gibt.
versehen. Diese Schlüssel sind auch der Einfachheit halber als Ziel der Verweise
genommen worden (anstelle von echten Speicheradressen).
Wie üblich soll ein Zeigerwert
0 ausdrücken, dass auf kein Objekt verwiesen wird, es also kein Kind an
dieser Stelle gibt.
Kopf
Da die Wurzel einer Löschung oder einer Rotation anheimfallen, somit den Baum nicht repräsentieren kann, muss diese Rolle von einer anderen Datenstruktur übernommen werden, die in der Literatur Kopf[14] genannt wird. Sie enthält den Zeiger zur Wurzel und fungiert als eine Art Elter der Wurzel.
Iterative Programmierung
In der Literatur werden die Operationen häufig in rekursiver
Programmierung vorgestellt. Der Anwender hat aber mehrere Vorteile davon,
wenn der Implementierer die vom Aufschreiben her eleganten Rekursionen durch
simple Iterationen ersetzt hat, da dadurch
(Höhe) Prozeduraufrufe
und -rücksprünge eingespart werden und der Speicherbedarf für den
Programm-Stapelspeicher konstant
gehalten wird. Es geht aber nicht nur um Ressourcenschonung. Bei der
Traversieroperation wird dadurch beispielsweise die Programmierung der
Anwendung wesentlich vereinfacht.[15]
Für das Aufbewahren des Rückwegs zu Wurzel und Kopf, der beim Traversieren, aber
auch häufig bei Modifikationen zur Aufrechterhaltung der Bauminvarianten (AVL-
oder Rot-Schwarz-Kriterium), gebraucht wird und der bei der rekursiven
Programmierung neben anderem im Programmstapelspeicher steckt, muss dann ein
anderes, explizites Konstrukt gewählt werden, welches sich im Cursor
(siehe unten) subsumieren lässt.
Dadurch wird eine Trennung der modifizierenden Operationen von der Navigation möglich.
Trennung der navigierenden von den modifizierenden Operationen
Einfüge- und Löschoperation sind sinnvollerweise von der Suchoperation zu trennen, wenn zum Einfügepunkt beziehungsweise Knoten auch auf andere Weise als mit der Standardsuchoperation navigiert werden soll, beispielsweise mittels eines Querschritts oder mithilfe einer zweiten Suchstruktur für dasselbe Element wie in der #Anwendung mit mehreren Zugriffspfaden.
Diese Modularisierung der Navigations- von den modifizierenden Operationen setzt einen gegebenenfalls unterlogarithmischen (sprich: konstanten) Aufwand der letzteren frei, denn ein Aufstieg bis zur Wurzel ist beispielsweise bei AVL-Baum und Rot-Schwarz-Baum nur in Ausnahmefällen erforderlich. In Anwendungen mit starkem sequentiellem Anteil kann sich das positiv auf die Laufzeit auswirken.
Cursor
Beim Suchen wird ein Paar (Knoten, Richtung) erzeugt, welches geeignet ist, beim Einfügen den Einfügepunkt zu spezifizieren. Beim Löschen wird der zu löschende Knoten durch die Komponente Knoten bezeichnet, und die Komponente Richtung kann angeben, wohin der Cursor nach der Löschung fortschreiten soll. Beim Traversieren gibt Knoten den Ausgangspunkt und Richtung die gewünschte Richtung der Navigation an, um im Ergebnis wieder bei einem solchen Paar anzukommen. Damit erzeugen und/oder verbrauchen alle wichtigen Operationen ein Konstrukt, das (in Analogie zum Beispiel zu den Datenbanken) Cursor genannt wird.[16]
Die Größe des Cursors hängt entscheidend davon ab, ob die Knoten einen Zeiger zum Elter enthalten oder nicht.
- Elterzeiger vorhanden: Ein Paar (Knoten, Richtung)
stellt einen vollwertigen Cursor dar.
Ein Cursor wird nach einer Operation dann und nur dann ungültig, wenn es sich um eine Löschung handelt, und der Knoten des Cursors das Ziel der Löschung ist.
Mit dem prozentualen Aufschlag auf den Speicherbedarf für die Datenstruktur erkauft man sich auf jeden Fall eine prozentuale Einsparung an Laufzeit, da der Rückweg zu Wurzel und Kopf immer schon gesichert ist. - Zeiger zum Elterknoten nicht vorhanden („Cursor mit Stapel“):
Zusätzlich zum Paar (Knoten, Richtung) muss der Pfad vom Knoten
zu Wurzel und Kopf im Cursor gehalten werden.[17]
Die Länge des Cursors entspricht damit der maximalen Höhe des Baums. Diese ist
entweder von sich aus ausreichend beschränkt (vorgerechnetes Beispiel AVL-Baum),
oder der Stapelüberlauf löst eine Reorganisation des Baums oder ein abnormales
Ende aus.
Bei allen Operationen ist der Zugriff zum Elterknoten über den Stapel im Cursor geringfügig teurer als über den Elterzeiger. Soll der Pfad im Cursor auch nach einer modifizierenden Operation gültig gehalten werden (beispielsweise für sequentielle Einfügungen oder Löschungen), kommt noch ein zusätzlicher prozentualer Aufschlag hinzu. Dies kann so aber nur für einen Cursor, den Eingabecursor, erbracht werden.
Benötigt eine Anwendung mehrere Cursor für ein und denselben Suchbaum und über Änderungen an ihm hinweg, dann kann das Aufrechterhalten der Konsistenz der Cursor mit Stapel (zum Beispiel durch erneutes Suchen) so aufwändig werden, dass es wirtschaftlicher ist, dem Baum Elterzeiger zu spendieren.
Anwendung mit mehreren Zugriffspfaden
Als Beispiel für eine Anwendung mit 2 Zugriffspfaden sei ein klassisches Speichermanagement gebracht. Elemente der Datenstruktur sind die freien Speicherblöcke mit den Attributen (Feldern) Ort und Größe. Für jedes der beiden Felder gebe es eine Suchstruktur, bei Ort ohne Duplikate. Da bei Größe jedoch Duplikate unvermeidlich sind, empfiehlt sich ein lexikographisch zusammengesetzter Schlüssel (Größe,Ort). Beim Akquirieren wird ein Block von Mindestgröße gesucht, ausgetragen und ein Rest, falls vorhanden, wieder eingetragen. Bei der Speicherrückgabe wird nach Ort gesucht, auf Konfliktfreiheit mit den Nachbarblöcken geprüft (ebenfalls ein Beispiel für die Nützlichkeit der Querschritts) und der zurückzugebende Block gegebenenfalls mit diesen verschmolzen. Alle Veränderungen müssen auf beiden Suchstrukturen durchgezogen werden. Sind Elterzeiger vorhanden, dann erspart das Hangeln von der einen Suchstruktur zur anderen einen Suchvorgang.
Anwendungen
Wie Ben Pfaff[18] zeigt, decken die dynamischen Suchbaumstrukturen AVL-Baum, Rot-Schwarz-Baum und Splay-Baum dieselben wesentlichen Funktionen ab. Große Unterschiede stellt er im Laufzeitverhalten fest, wobei der AVL-Baum in Median und Mittelwert am besten abschneidet.
In der Informatik haben die dynamischen Suchbaumstrukturen einen großen Einsatzbereich als grundlegende Hilfsmittel bei:
- Duplikatunterdrückung, Deduplikation, Duplikaterkennung
- Elementare Mengenoperationen wie Durchschnittsbildung und Vereinigung
- Standard Template Library (STL)
Bei Ben Pfaff[18] finden sich systemnahe Anwendungen (alle unter ×86-based Linux):
- Verwaltung von Virtual Memory Areas (VMAs) unter Einschluss von range queries zur Feststellung des Überlappens von existierenden VMAs (S. 4)
- Eindeutige Kennzeichnung von IP-Paketen (S. 7)
Ferner:
- Liste der Variablen in einem Programm, die ein Interpreter zu pflegen hat: der Interpreter muss jederzeit in der Lage sein zu entscheiden, ob einer Programmvariablen momentan ein Wert zugewiesen ist und gegebenenfalls welcher. Ähnliches gilt für einen Compiler.
- Binary Tree Sort (Sortieren durch Einfügen)
- In #Anwendung mit mehreren Zugriffspfaden ein klassisches Speichermanagement.
Auswahlkriterien
Das binäre Suchen im Array kann als eine Art Vorläufer der binären Suchbäume angesehen werden. Da es sich bei Einfügungen und Löschungen linear verhält und dann auch die Speicherverwaltung seines Arrays sorgfältig überlegt werden muss, wird es in der Praxis fast nur für statische, vorsortierte Tabellen eingesetzt. Sind also Einfügungen oder Löschungen für die Anwendung wichtig, sind die Binärbäume geeigneter. Bezüglich Suchzeit und Speicher verhalten sich binäres Suchen im Array und höhenbalancierte binäre Suchbäume asymptotisch gleich.
Obwohl rein zufällige binäre Suchbäume sich im Mittel logarithmisch verhalten, garantiert ein binärer Suchbaum ohne irgendeine Vorkehrung, die einer Entartung entgegenwirkt, keineswegs eine unterlineare Laufzeit. Entartungen können systematisch vorkommen, zum Beispiel wenn ein Programmierer massenhaft nahe benachbarte Sprungmarkennamen vergibt.
Es gibt jedoch sehr viele Konzepte, die dazu entwickelt wurden, eine ausreichende Balance sicherzustellen. Hierbei stehen sich immer Aufwand und Ertrag gegenüber. Zum Beispiel ist der Aufwand, einen binären Suchbaum ständig vollständig balanciert zu halten, so hoch, dass sich das nur bei Anwendungen lohnen dürfte, deren Laufzeit in extremer Weise vom Suchen dominiert wird.
Ein wichtiges Kriterium für die Auswahl ist, ob der Binärbaum statisch ist, und so ein einmaliger optimaler Aufbau ausreicht, oder ob verändernde Operationen wie Einfügen und Löschen wichtig sind. Für erstere kommen gewichtete Suchbäume in Betracht, worunter auch der Bellman-Algorithmus. Bei letzteren sind höhen-balancierte Suchbäume wie der AVL-Baum und der Rot-Schwarz-Baum, aber auch Splay-Bäume von Interesse.
Eine Gegenüberstellung von Komplexitäten verschiedener Suchalgorithmen finden sich im Artikel Suchbaum; Laufzeitmessungen anhand realistischer Beispiele sind zu finden bei Ben Pfaff: Performance Analysis of BSTs in System Software. Stanford University, 2004.
Bei diesen Überlegungen wurde generell angenommen, dass der ganze Baum im Arbeitsspeicher (Hauptspeicher) untergebracht ist. Spielen Zugriffe zu externen Medien eine Rolle, kommen ganz andere Kriterien hinzu. Schon der B-Baum, der solche Gesichtspunkte berücksichtigt, ist zwar ein Suchbaum, aber nicht mehr binär.
Historisches
Die im Abschnitt Motivation erwähnte, sehr bekannte Suchstruktur Binäre Suche im Array gilt als Vorläufer der dynamischen Suchbaumstrukturen. Als naheliegende Umsetzung des Nachschlagens in einem (sortierten) Wörterbuch, dürfte sie mehrfach und ohne Kenntnis anderer Implementierungen entwickelt und implementiert worden sein. Im dynamischen Anwendungsfall kann sie aber mit den neueren Entwicklungen nicht mithalten, obwohl sie im statischen Fall eine hervorragende Lösung ist. Es gibt Makros, die einen Compiler veranlassen, zu einer gegebenen (sortierten) Tabelle von (Schlüssel, Werte)-Paaren Quelltext für eine iterierende oder schleifenlose binäre Suche zu erzeugen.
Im Jahr 1962 erschien zum ersten Mal eine dynamische Suchbaumstruktur in Form des AVL-Baums. Seine Erfinder sind die genannten sowjetischen Mathematiker Georgi Adelson-Welski und Jewgeni Landis. Ihr Beitrag im Journal Doklady Akademii Nauk SSSR wurde noch im selben Jahr ins Englische übersetzt. Die Übersetzung trägt (wie entsprechend das Original) den sehr ehrgeizigen Titel „An algorithm for the organization of information“. Die Bezeichnung AVL-Baum findet sich in dieser Übersetzung nicht.
Im Jahr 1970 veröffentlichte Rudolf Bayer seine erste Arbeit über den B-Baum. Er ist kein Binärbaum, unterstützt heterogene Speicher, beispielsweise Hauptspeicher und Hintergrundspeicher, und wird bei Datenbanksystemen eingesetzt.
Danach folgte im Jahr 1972 zunächst unter dem Namen „symmetric binary B-tree“ der Rot-Schwarz-Baum von Rudolf Bayer. Ihm war die Balance-Regel des AVL-Baums zu streng. Eine Umbenennung erfolgte 1978 von Leonidas Guibas und Robert Sedgewick in das heute übliche „red–black tree“, später auch „RB tree“.
Splay-Bäume wurden im Jahr 1985 von Daniel Sleator und Robert Tarjan unter dem Namen „Self-Adjusting Binary Search Trees“ vorgestellt. Sie sind noch dynamischer als die vorgenannten, indem sie sich auch bei Suchoperationen verändern.
Eine grobe Gegenüberstellung dynamischer Suchbäume findet sich im
Siehe auch
Literatur
- Donald E. Knuth: The art of computer programming. Volume 3: Sorting and Searching. 3. Auflage. Addison-Wesley, 1997, ISBN 0-201-89683-4.
- Kurt Mehlhorn: Datenstrukturen und effiziente Algorithmen. Teubner, Stuttgart 1988, ISBN 3-519-12255-3.
- Kurt Mehlhorn, Peter Sanders: Algorithms and Data Structures. The Basic Toolbox. Springer, Berlin/Heidelberg 2008, ISBN 978-3-540-77977-3.
Anmerkungen
- ↑ Gibt es keine Werte, sondern nur Schlüssel, so ist das zugrunde liegende Modell das der endlichen Menge, und die Fragestellung reduziert sich darauf, ob ein gegebener Schlüssel in der Menge vorhanden ist oder nicht. Es ist also die Indikatorfunktion der Menge zu realisieren.
- ↑ Die Sichtweise der Abb. 1B findet sich beispielsweise bei #Knuth und im Artikel Rot-Schwarz-Baum.
- ↑ #Mehlhorn 1988 S. 296
- ↑ deren Erfüllung der Relationsgesetze die Software nicht nachprüfen kann
- ↑ #Mehlhorn 2008
- ↑
wie
locateLocallyin #Mehlhorn 2008 S. 150 - ↑ nach #Mehlhorn 1988 S. 147
- ↑ internal path length bei #Knuth pp. 399–400
- ↑ external path length bei #Knuth pp. 399–400
- ↑
 bei #Knuth.
bei #Knuth.
- ↑
Genauso gut kann man im linken Kindbaum von
zum rechtesten Knoten navigieren, der der in-order-Vorgänger von
ist und kein rechtes Kind haben kann.
- ↑
Die gewählte Sprechweise dient nur der leichteren
Verständlichkeit. Natürlich muss ein generisches Softwarepaket von
Benutzerdaten unabhängig bleiben und umgekehrt vorgehen, nämlich die ihm nicht
notwendigerweise bekannten Benutzerdaten des Knotens
unberührt lassen und
mit allen zum binären Suchbaum gehörigen Verbindungen des Knotens
ausstatten, sowie alle auf
zeigenden Zeiger auf
zeigen lassen. Dazu gehört, dass, falls
die Wurzel war, der Knoten
zur neuen Wurzel wird.
- ↑
So in Exercise 7.10. in #Mehlhorn
2008 S. 155. Die obigen Funktionen
FindDupGEundFindDupLEunterstützen dieses, wenn beim Einfügen und Löschen dieselbe genommen wird. Wird die jeweils andere Funktion genommen, bspw. beim EinfügenFindDupGEund beim LöschenFindDupLE, dann implementiert man eine First In – First Out-Disziplin. - ↑ „Header node“ und „HEAD“ bei Donald E. Knuth: The Art of Computer Programming, Band 3, Sorting and Searching, 2. Auflage, Addison-Wesley, 1998, S. 462; totum pro parte „tree data structure“ bei Ben Pfaff: An Introduction to Binary Search Trees and Balanced Trees. Free Software Foundation, Inc. Boston 2004.
- ↑ Siehe dazu Traversierung (mit Codebeispielen) und Ben Pfaff: An Introduction to Binary Search Trees and Balanced Trees. Free Software Foundation, Inc. Boston 2004, S. 47 „4.9.2 Traversal by Iteration“.
- ↑ Ben Pfaff gibt einem Objekt mit sehr ähnlicher Funktionalität den Namen „traverser“ und offeriert für Suchen, Einfügen und Löschen eine Standard- und eine Traverser-Variante. ( An Introduction to Binary Search Trees and Balanced Trees. Pfaff 2004, p. 15 „2.10 Traversers“)
- ↑ „auxiliary stack“ bei #Knuth (p. 461), der beim AVL-Baum die Einfügung aber anderweitig löst.
- ↑ a b Ben Pfaff: Performance Analysis of BSTs in System Software. Stanford University 2004.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 10.09. 2025