Vektorbündel

Vektorbündel oder manchmal auch Vektorraumbündel sind Familien von Vektorräumen, die durch die Punkte eines topologischen Raumes parametrisiert sind. Vektorbündel gehören damit auch zu den Faserbündeln. Existiert zu jedem Vektorraum des Vektorbündels eine Menge von Basen, so kann auch diese Menge ein Faserbündel bilden. Man spricht dann von Rahmen- oder auch Reperbündeln. Diese speziellen Faserbündel sind zugleich auch Hauptfaserbündel.
Anschaulich besteht ein Vektorbündel aus je einem Vektorraum für jeden Punkt des Basisraumes. Da Vektorräume gleicher Dimension jedoch stets isomorph sind, liegt die wesentliche Information in den Beziehungen zwischen diesen Vektorräumen. Das bekannteste Beispiel für ein Vektorbündel ist das Tangentialbündel einer differenzierbaren Mannigfaltigkeit. Der Zusammenhang zwischen den verschiedenen Tangentialräumen, also den Vektorräumen zu den einzelnen Punkten, äußert sich beispielsweise in der Frage, ob ein Vektorfeld differenzierbar ist.
Die Frage, wie Vektorbündel auf einem Raum aussehen können, hängt eng mit globalen topologischen Eigenschaften des Raumes zusammen. Nicht-isomorphe Vektorbündel können oft durch ihre charakteristischen Klassen unterschieden werden.
Definitionen
Vektorbündel
 .
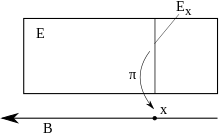
Hier ist der Totalraum
.
Hier ist der Totalraum  und der Basisraum
und der Basisraum  .
Die Abbildung
.
Die Abbildung  projiziert jede Gerade
projiziert jede Gerade  auf den Punkt
auf den Punkt  .
Der Raum
.
Der Raum  wird Faser über
genannt. Außerdem ist der Totalraum
wird Faser über
genannt. Außerdem ist der Totalraum  die Vereinigung aller Fasern.
die Vereinigung aller Fasern.Sei  ein reeller beziehungsweise komplexer n-dimensionaler Vektorraum. Ein reelles
beziehungsweise komplexes Vektorbündel vom Rang
ein reeller beziehungsweise komplexer n-dimensionaler Vektorraum. Ein reelles
beziehungsweise komplexes Vektorbündel vom Rang  ist ein Tripel ,
bestehend aus topologischen
Räumen
(Totalraum) und
ist ein Tripel ,
bestehend aus topologischen
Räumen
(Totalraum) und  (Basis) sowie einer stetigen surjektiven Abbildung ,
so dass gilt:
(Basis) sowie einer stetigen surjektiven Abbildung ,
so dass gilt:
- Für jeden Punkt
von
trägt die Faser
 von
über
die Struktur eines reellen beziehungsweise komplexen n-dimensionalen Vektorraums.
von
über
die Struktur eines reellen beziehungsweise komplexen n-dimensionalen Vektorraums. - „Lokale Trivialität“: Zu jedem Punkt
 existiert eine Umgebung
existiert eine Umgebung
 von
und ein Homöomorphismus
von
und ein Homöomorphismus
-
 ,
,
- der mit
 kompatibel ist, das heißt
kompatibel ist, das heißt  ,
und für den
,
und für den
- für jedes
 in
ein Isomorphismus
von Vektorräumen ist. Dabei bezeichnet
in
ein Isomorphismus
von Vektorräumen ist. Dabei bezeichnet  die Projektion
auf den ersten Faktor. Ein solches
die Projektion
auf den ersten Faktor. Ein solches  heißt lokale Trivialisierung.
heißt lokale Trivialisierung.

Ein Vektorbündel
heißt trivial, wenn es eine Trivialisierung mit  gibt.
gibt.  ist ein triviales Vektorbündel.
ist ein triviales Vektorbündel.
In verkürzter Ausdrucksweise spricht man oft vom „Vektorbündel “,
womit das Tripel
implizit benannt wird.
Geradenbündel
Ein Vektorbündel mit Rang 1 wird Geradenbündel (als Fehlübersetzung aus dem Englischen auch Linienbündel) genannt.
Beispiele
- Das Tangentialbündel einer differenzierbaren Mannigfaltigkeit ist ein Vektorbündel bestehend aus den Tangentialräumen der Mannigfaltigkeit. Entsprechend ist auch das Kotangentialbündel bestehend aus den Kotangentialräumen – also den Dualräumen der Tangentialräume – ein Vektorbündel.
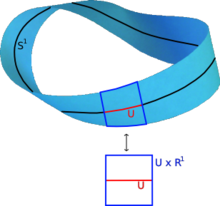
- Das Möbiusband
ist ein Geradenbündel über der 1-Sphäre
(Kreis)
 .
Lokal ist es homöomorph
zu
.
Lokal ist es homöomorph
zu  ,
wobei
eine offene Teilmenge von
ist. Allerdings ist das Möbiusband nicht homöomorph zu
,
wobei
eine offene Teilmenge von
ist. Allerdings ist das Möbiusband nicht homöomorph zu  ,
was ein Zylinder
wäre.
,
was ein Zylinder
wäre. - Der Raum der Differentialformen ist als Bündel der äußeren Algebra auch ein Vektorbündel.
- Das
 -Tensorbündel
ist ebenfalls ein Vektorbündel, das die zuvor gelisteten Vektorbündel als
Spezialfälle umfasst.
-Tensorbündel
ist ebenfalls ein Vektorbündel, das die zuvor gelisteten Vektorbündel als
Spezialfälle umfasst.
Homomorphismus von Vektorbündeln
Homomorphismus
Ein Vektorbündelhomomorphismus von dem Vektorbündel  in das Vektorbündel
in das Vektorbündel  ist ein Paar
ist ein Paar  von stetigen
Abbildungen
von stetigen
Abbildungen  und
und  ,
so dass
,
so dass
 gilt und
gilt und für alle
für alle  eine lineare
Abbildung ist.
eine lineare
Abbildung ist.
Oftmals wird ein Vektorbündelhomomorphismus kurz als Bündelhomomorphismus oder als Homomorphismus bezeichnet.
Isomorphismus
Ein Vektorbündelhomomorphismus
von
nach
ist ein Vektorbündelisomorphismus, falls  und
und  Homöomorphismen
sind und die induzierte lineare Abbildung
ein Vektorraumisomorphismus
ist.
Homöomorphismen
sind und die induzierte lineare Abbildung
ein Vektorraumisomorphismus
ist.
Beispiel
Betrachtet man den Kreis
als Mannigfaltigkeit, dann ist das Tangentialbündel  vom
isomorph zu dem trivialen Vektorbündel
vom
isomorph zu dem trivialen Vektorbündel  .
Der Homöomorphismus zwischen den Basisräumen ist die identische
Abbildung und der zwischen den Totalräumen lautet
.
Der Homöomorphismus zwischen den Basisräumen ist die identische
Abbildung und der zwischen den Totalräumen lautet

für  und
und  .
.
Unterstrukturen
Untervektorbündel
Mit
werden die Fasern des Vektorbündels
am Punkt
bezeichnet. Ein Untervektorbündel des Vektorbündels
besteht aus einem topologischen Teilraum  bestehend aus einer Familie von Untervektorräumen
bestehend aus einer Familie von Untervektorräumen
 von ,
so dass
von ,
so dass  ein eigenes Vektorbündel ist.
ein eigenes Vektorbündel ist.
Eingeschränktes Vektorbündel
Mit
werden wieder die Fasern des Vektorbündels
am Punkt
bezeichnet und  bezeichnet einen topologischen Teilraum. Das auf
bezeichnet einen topologischen Teilraum. Das auf  eingeschränkte Vektorbündel
eingeschränkte Vektorbündel  ist definiert durch
ist definiert durch
 .
.
Das eingeschränkte Vektorbündel ist ein eigenständiges Vektorbündel bezüglich
des topologischen Teilraums .
Konstruktionen mit Vektorbündeln
Zurückgezogenes Vektorbündel
Für ein Vektorbündel
und eine stetige Abbildung  definiert man das zurückgezogene Vektorbündel (engl.: "pull-back" oder "induced
bundle", siehe auch Rücktransport)
als das Bündel über
definiert man das zurückgezogene Vektorbündel (engl.: "pull-back" oder "induced
bundle", siehe auch Rücktransport)
als das Bündel über  mit Totalraum
mit Totalraum

und Projektion  .
Die Vektorraum-Struktur wird definiert durch
.
Die Vektorraum-Struktur wird definiert durch  .
Man kann zeigen, dass dies wieder ein lokal triviales Vektorbündel definiert.
.
Man kann zeigen, dass dies wieder ein lokal triviales Vektorbündel definiert.
Für die durch  definierte Abbildung
definierte Abbildung  gilt also
gilt also  und für jedes
und für jedes  induziert
induziert  einen Vektorraum-Isomorphismus
einen Vektorraum-Isomorphismus
 .
.
Für jede Bündelabbildung  hat man einen Isomorphismus
hat man einen Isomorphismus  ,
wobei
die zu
,
wobei
die zu  gehörende Abbildung der Basen ist.
gehörende Abbildung der Basen ist.
Direktes Produkt, Whitney-Summe, Tensorprodukt
Für zwei Vektorbündel  definiert man das direkte Produkt als
definiert man das direkte Produkt als

wobei jede Faser  mit der Vektorraum-Struktur als direkte
Summe der Vektorräume
mit der Vektorraum-Struktur als direkte
Summe der Vektorräume  und
und  versehen wird.
versehen wird.
Seien jetzt  Vektorbündel über derselben Basis, also
Vektorbündel über derselben Basis, also  .
Ihre Whitney-Summe wird dann mit Hilfe der Diagonal-Abbildung
.
Ihre Whitney-Summe wird dann mit Hilfe der Diagonal-Abbildung
 definiert als zurückgezogenes Bündel
definiert als zurückgezogenes Bündel
 .
.
Die Whitney-Summe ist also gerade das Vektorbündel über ,
dessen Faser über  die direkte Summe
die direkte Summe  ist.
ist.
Analog wird das Tensorprodukt  definiert als das Vektorbündel, dessen Faser über
das Tensorprodukt
definiert als das Vektorbündel, dessen Faser über
das Tensorprodukt  ist.
ist.
Weitere Objekte bei Vektorbündeln
Schnitt
Ist
eine offene Teilmenge von ,
so heißt eine Abbildung

für die  gilt, ein Schnitt von
über .
Die Menge
gilt, ein Schnitt von
über .
Die Menge  aller Schnitte von
über
bildet einen Vektorraum.
aller Schnitte von
über
bildet einen Vektorraum.
Rahmen
Unter einem Rahmen (englisch frame, französisch repère) versteht man eine Art Basis eines Vektorbündels. Es handelt sich um n linear unabhängige Vektoren zu jeder Faser. Diese Vektoren bilden also an jedem Punkt eine Basis der Faser. Präzise bedeutet dies:
Sei
und sei  eine offene Teilmenge des Basisraums. Ein lokales Reper oder Rahmen von
über
ist ein geordnetes n-Tupel
eine offene Teilmenge des Basisraums. Ein lokales Reper oder Rahmen von
über
ist ein geordnetes n-Tupel  .
Dabei ist für alle i
.
Dabei ist für alle i  ein Schnitt
in
über ,
so dass
ein Schnitt
in
über ,
so dass  eine Basis der Faser
eine Basis der Faser  für alle
für alle  bildet. Falls man
wählen kann, so spricht man von einem globalen Rahmen.
bildet. Falls man
wählen kann, so spricht man von einem globalen Rahmen.
Vektorbündel mit zusätzlichen Strukturen
Differenzierbares Vektorbündel
Sei
ein Vektorbündel. Sind
und
differenzierbare
Mannigfaltigkeiten und sind die Projektion
sowie die Trivialisierungen
differenzierbar, so heißt das Vektorbündel differenzierbar. Es heißt
glatt, wenn die Mannigfaltigkeiten
glatt sind und die Abbildungen beliebig oft differenzierbar sind.
Holomorphes Vektorbündel
Ein holomorphes Vektorbündel ist ein komplexes Vektorbündel  über einer komplexen
Mannigfaltigkeit
über einer komplexen
Mannigfaltigkeit  ,
so dass der Totalraum
eine komplexe Mannigfaltigkeit und die Projektion
eine holomorphe
Abbildung ist.
,
so dass der Totalraum
eine komplexe Mannigfaltigkeit und die Projektion
eine holomorphe
Abbildung ist.
G-Vektorbündel
Sei  eine Gruppe. Wenn
und
G-Räume sind,
dann ist ein Vektorbündel
ein G-Vektorbündel falls die Gruppenwirkung
eine Gruppe. Wenn
und
G-Räume sind,
dann ist ein Vektorbündel
ein G-Vektorbündel falls die Gruppenwirkung

für alle  eine lineare Abbildung ist.
eine lineare Abbildung ist.
Klassifizierender Raum und klassifizierende Abbildung
Der klassifizierende Raum für  -dimensionale
reelle Vektorbündel ist die
Graßmann-Mannigfaltigkeit
der -dimensionalen
Unterräume im
-dimensionale
reelle Vektorbündel ist die
Graßmann-Mannigfaltigkeit
der -dimensionalen
Unterräume im  ,
diese wird als
,
diese wird als  bezeichnet. Das bedeutet: jedes -dimensionale
reelle Vektorbündel
bezeichnet. Das bedeutet: jedes -dimensionale
reelle Vektorbündel  ist von der Form
ist von der Form  für eine stetige Abbildung
für eine stetige Abbildung  (die sogenannte klassifizierende Abbildung des Bündels) und das
tautologische
Bündel
(die sogenannte klassifizierende Abbildung des Bündels) und das
tautologische
Bündel  ,
und zwei Bündel sind isomorph genau dann, wenn ihre klassifizierenden
Abbildungen homotop
sind.
,
und zwei Bündel sind isomorph genau dann, wenn ihre klassifizierenden
Abbildungen homotop
sind.
Analog ist  ,
die Graßmann-Mannigfaltigkeit der -dimensionalen
Unterräume im
,
die Graßmann-Mannigfaltigkeit der -dimensionalen
Unterräume im  ,
der klassifizierende Raum für -dimensionale
komplexe Vektorbündel.
,
der klassifizierende Raum für -dimensionale
komplexe Vektorbündel.
Stabile Vektorbündel
Zwei Vektorbündel
und  heißen stabil äquivalent, wenn es triviale Vektorbündel
heißen stabil äquivalent, wenn es triviale Vektorbündel  (nicht notwendig derselben Dimension) mit
(nicht notwendig derselben Dimension) mit

gibt. Die Äquivalenzklassen dieser Äquivalenzrelation werden als stabile Vektorbündel bezeichnet. (Diese Definition steht in keinem Zusammenhang mit dem Begriff der stabilen Vektorbündel in der Algebraischen Geometrie.)
Es seien  und
und  die aufsteigenden Vereinigungen (d.h. die Kolimiten bzgl. der mittels
die aufsteigenden Vereinigungen (d.h. die Kolimiten bzgl. der mittels
 definierten Inklusionen
definierten Inklusionen  und
und  ),
dann kann man zu einem Vektorbündel
und seiner klassifizierenden Abbildung
),
dann kann man zu einem Vektorbündel
und seiner klassifizierenden Abbildung  bzw.
bzw.  die Komposition mit der Inklusion
die Komposition mit der Inklusion  bzw.
bzw.  betrachten. Zwei Vektorbündel sind genau dann stabil äquivalent, wenn die
entsprechenden Abbildungen
betrachten. Zwei Vektorbündel sind genau dann stabil äquivalent, wenn die
entsprechenden Abbildungen  bzw.
bzw.  homotop sind.
homotop sind.
Vektorbündel in der algebraischen Geometrie
Definition
Für (algebraische) Vektorbündel in der algebraischen
Geometrie sind
und
Schemata,
ist für alle Punkte
von
ein  -Vektorraum,
und die lokalen Trivialisierungen sind Isomorphismen
-Vektorraum,
und die lokalen Trivialisierungen sind Isomorphismen

Meist ist mit „Vektorbündel“ in der algebraischen Geometrie jedoch eine lokal freie Garbe gemeint (s.u.).
Lokalfreie Garbe
Es sei  ein lokal geringter Raum, z.B. ein topologischer Raum mit der Garbe der stetigen
reell- oder komplexwertigen Funktionen, eine differenzierbare Mannigfaltigkeit
mit der Garbe der
ein lokal geringter Raum, z.B. ein topologischer Raum mit der Garbe der stetigen
reell- oder komplexwertigen Funktionen, eine differenzierbare Mannigfaltigkeit
mit der Garbe der  -Funktionen
oder ein Schema.
-Funktionen
oder ein Schema.
Eine lokal freie Garbe ist ein  -Modul
,
der lokal isomorph zu einem freien -Modul
ist, d.h.
-Modul
,
der lokal isomorph zu einem freien -Modul
ist, d.h.  kann durch offene Mengen
überdeckt werden, für die
kann durch offene Mengen
überdeckt werden, für die  isomorph zu einer direkten Summe von Kopien von
isomorph zu einer direkten Summe von Kopien von  ist.
ist.
Lokalfreie Garben und Vektorbündel
Die beiden folgenden Konstruktionen liefern im Fall von topologischen Räumen
oder differenzierbaren Mannigfaltigkeiten eine Äquivalenz der Kategorien von lokal
freien Garben sowie Vektorbündeln auf
(der Einfachheit der Notation halber ist der Fall von reellen Vektorbündeln über
einem topologischen Raum beschrieben):
- Einem Vektorbündel wird die Garbe seiner Schnitte zugeordnet.
- Einer lokal freien Garbe
wird die disjunkte Vereinigung
ihrer Fasern
 zugeordnet. Wir wählen eine offene Überdeckung
zugeordnet. Wir wählen eine offene Überdeckung  von ,
so dass
auf jedem
von ,
so dass
auf jedem  trivial wird. Eine Trivialisierung definiert
nirgends verschwindende Schnitte von
über ,
die fasernweise eine Basis bilden. Diese definieren eine Abbildung
trivial wird. Eine Trivialisierung definiert
nirgends verschwindende Schnitte von
über ,
die fasernweise eine Basis bilden. Diese definieren eine Abbildung
-
 ,
,
- und wir definieren die Topologie auf
dadurch, dass wir fordern, dass diese Abbildungen Homöomorphismen sind. Sie
ist wohldefiniert, da sich diese Abbildungen über dem Schnitt zweier Mengen
und
 nur um einen Homöomorphismus (genauer gesagt einen stetig variierenden
Vektorraumautomorphismus von
nur um einen Homöomorphismus (genauer gesagt einen stetig variierenden
Vektorraumautomorphismus von  )
unterscheiden.
)
unterscheiden.
Im Fall der algebraischen Geometrie ist diese Konstruktion etwas einfacher:
das Bündel zu einer lokalfreien Garbe
ist

dabei bezeichnet  die symmetrische
Algebra und
die symmetrische
Algebra und  das Algebrenspektrum.
das Algebrenspektrum.
Weiterführende Begriffe
- Die Untersuchung so genannter stabiler Äquivalenzklassen von Vektorbündeln ist Gegenstand der K-Theorie.
- Auf algebraischen Kurven haben (semi-)stabile Vektorbündel besonders gute Eigenschaften.
Literatur
- Karlheinz Knapp: Vektorbündel. Springer Fachmedien, Wiesbaden 2013, ISBN 978-3-658-03113-8.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 09.05. 2021