Spline
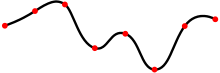

Ein Spline n-ten Grades (auch Polynomzug) ist eine Funktion, die stückweise aus Polynomen höchstens n-ten Grades zusammengesetzt ist. Dabei werden an den Stellen, an denen zwei Polynomstücke zusammenstoßen (man spricht auch von Knoten), bestimmte Bedingungen gestellt, etwa dass der Spline (n-1)-mal stetig differenzierbar ist.
Handelt es sich bei dem Spline in all seinen Abschnitten um jeweils eine lineare Funktion, so nennt man den Spline linear (es handelt sich dann um einen Polygonzug), analog gibt es quadratische, kubische usw. Splines.
Zu den Pionieren der Splineerforschung gehören Isaac Jacob Schoenberg (ab den 1940er Jahren), Paul de Faget de Casteljau, Pierre Bézier und Carl de Boor.
Allgemeines
Der Begriff Spline wurde zuerst in einer englischen Veröffentlichung von Isaac Jacob Schoenberg im Jahr 1946 für glatte, harmonische, zusammengesetzte mathematische Kurven dritten Grades benutzt.
Splines werden vor allem zur Interpolation und Approximation benutzt. Durch die stückweise Definition sind Splines flexibler als Polynome und dennoch relativ einfach und glatt. Dadurch ergeben sich bei der Spline-Interpolation nicht die Nachteile, die durch die starke Oszillation von Polynomen höheren Grades und deren Unbeschränktheit bei der Polynominterpolation entstehen (Runges Phänomen). Splines lassen sich auch gut benutzen, um Kurven darzustellen. Hier finden sie Einsatz im CAD. Mathematisch analog lassen sich auf beide Weisen nicht nur Kurven, sondern auch Flächen beschreiben.
Wortherkunft: Der Begriff stammt aus dem Schiffbau: eine lange dünne Latte (Straklatte, englisch spline), die an einzelnen Punkten durch Molche fixiert wird, biegt sich genau wie ein kubischer Spline mit natürlicher Randbedingung. Dabei wird die Spannungsenergie minimal.
Spline-Raum
Funktionen  ,
die sich in jedem der Teilintervalle
,
die sich in jedem der Teilintervalle  einer streng wachsenden Knotenfolge
einer streng wachsenden Knotenfolge  als Polynome mit Maximalgrad
als Polynome mit Maximalgrad  darstellen lassen, heißen stückweise Polynomfunktionen auf
darstellen lassen, heißen stückweise Polynomfunktionen auf  (mit Maximalgrad
(mit Maximalgrad  ).
).
Außer diesem einfachen Aufbau aus Polynomabschnitten verlangt man bei Splines auch noch maximale Glattheit.
Der Spline-Raum  ist der Vektorraum aller
ist der Vektorraum aller  -mal
stetig differenzierbaren stückweisen Polynomfunktionen auf
mit Maximalgrad .
-mal
stetig differenzierbaren stückweisen Polynomfunktionen auf
mit Maximalgrad .
Bei der Konstruktion von Splines erweisen sich die abgeschnittenen Potenzfunktionen

mit  als nützlich.
als nützlich.  ist für
ist für  die Sprungfunktion,
für
die Sprungfunktion,
für  die Rampenfunktion und für
die Rampenfunktion und für  ist diese Funktion -mal
stetig differenzierbar.
ist diese Funktion -mal
stetig differenzierbar.
Jede stückweise Polynomfunktion auf
mit Maximalgrad
ist mit eindeutig bestimmten Koeffizienten  ,
,
 in der Form
in der Form

darstellbar. Da Splines -mal
stetig differenzierbar sein sollen, müssen bei ihnen die Koeffizienten  für die niedrigeren Potenzen
für die niedrigeren Potenzen  ,
die die Differenzierbarkeitsforderung nicht erfüllen, an den inneren Knoten
,
die die Differenzierbarkeitsforderung nicht erfüllen, an den inneren Knoten
 verschwinden. Splines
verschwinden. Splines  haben also die Darstellung
haben also die Darstellung

Die (auf  eingeschränkten) Funktionen
eingeschränkten) Funktionen  für
für  und
und  für
stellen also zusammen eine Basis für den Splineraum
dar. Damit ist der Splineraum
für
stellen also zusammen eine Basis für den Splineraum
dar. Damit ist der Splineraum  -dimensional.
-dimensional.
Die -malige
Differenzierbarkeit der Splines kann man gezielt an vorgegebenen Knotenpunkten
wieder abschwächen. In obiger Darstellung erreicht man das durch
Wiederhinzunehmen ausgewählter Basisfunktionen niedrigeren Grades an inneren
Knoten. Beim Algorithmus von De-Boor zur Darstellung von Splines ergibt sich das
automatisch, wenn man mehrfache Knoten in der Knotensequenz zulässt, genauer die
Forderung  für
für  abschwächt zu
abschwächt zu  für
und
für
und  für
für  .
.
Die in Mathematik und Technik genutzten Varianten der Splines, wie B-Splines oder kubische Splines, unterscheiden sich im Wesentlichen durch die für den Splineraum eingesetzte Basis.
Grad und Ordnung
Spline-Kurven werden in der Regel entweder, wie oben beschrieben, über den
Grad der stückweise zusammengesetzten Polynome definiert oder über deren
Ordnung. Hierbei werden für den Grad meist die Buchstaben
oder  verwendet, während es üblich ist, für die Ordnung den Buchstaben
verwendet, während es üblich ist, für die Ordnung den Buchstaben  zu verwenden. Hierbei gilt der Zusammenhang:
zu verwenden. Hierbei gilt der Zusammenhang:

Kubische Splines
Kubische Splines werden unter anderem zur Berechnung des Bahnverlaufes bei Achterbahnen verwendet, um ruckartige Beschleunigungswechsel für die Fahrgäste zu vermeiden. Kubische Splines finden weitere Anwendung bei der exakten Verlegung der Schienen bei Hochgeschwindigkeitsstrecken der Eisenbahn. Auch beim Entwurf von Kurven und Oberflächen (sogenannte „Freiformkurven und -flächen“), wie sie häufig im Schiff-, Flugzeug- und Automobilbau vorkommen, sind Splines von Bedeutung.
Splines eignen sich für solche Anwendungen, weil für jeden Polynomabschnitt Randbedingungen sowohl in Form von Punkten als auch in Form von Werten für die erste und zweite Ableitung (und in Abhängigkeit davon Steigung und Krümmung/Kurvenradius) vorgegeben werden können. Dadurch kann eine über den gesamten Kurvenverlauf stetige Krümmung erreicht werden. So werden Querbeschleunigungen beim Abfahren der Kurve immer allmählich aufgebaut bzw. an den Knotenpunkten vorgegebene Werte eingehalten.
Burmester-Schablonen stellen kubische Splines dar. Diese Schablonen werden genutzt, um Ausgleichskurven von Wertescharen zu zeichnen.
B-Splines
B-Spline ist die Kurzform von Basis-Spline. Im Kontext numerischer Verfahren, wo Splines häufig eingesetzt werden, entscheidet die Wahl der Basis für den Spline-Raum über eventuelle Rundungsfehler und damit über die praktische Einsetzbarkeit. Eine bestimmte Basis hat sich hier als am besten geeignet herausgestellt: sie ist numerisch stabil und erlaubt die Berechnung von Werten der Spline-Funktion mittels einer Drei-Term-Rekursion. Diese so genannten B-Spline-Basisfunktionen haben einen kompakten Träger, sie sind nur auf einem kleinen Intervall von Null verschieden. Änderungen der Koeffizienten wirken sich also nur lokal aus.
Carl de Boor weist in seinem Artikel B(asic) Spline Basics darauf hin, dass der Begriff B-Spline ursprünglich für bestimmte Splines mit minimalem Träger eingeführt wurde, dass sich jedoch im Bereich von Computer Aided Geometric Design die etwas unglückliche Verwendung des Begriffs B-Spline für Splines eingebürgert hat, die in der B-Splinebasis dargestellt werden.
Definition
Die als Basis-Splines (B-Splines) bezeichneten Basisfunktionen  des Grads
mit Knotenvektor
des Grads
mit Knotenvektor  sind von Curry und Schoenberg 1947 bis auf die Normierung in folgender Form
eingeführt worden:
sind von Curry und Schoenberg 1947 bis auf die Normierung in folgender Form
eingeführt worden:
![{\displaystyle N_{i,p,\tau }(u)=(\tau _{i+p+1}-\tau _{i})[\tau _{i},\ldots ,\tau _{i+p+1}]_{\bar {u}}({\bar {u}}-u)_{+}^{p}}](/svg/7b7af6fb31eeff0486589e205aa46043c68b49a8.svg)
Dabei steht ![{\displaystyle [\tau _{i},\ldots ,\tau _{i+p+1}]_{\bar {u}}({\bar {u}}-u)_{+}^{p}}](/svg/d9e1cfdac4a889ad7bf29ad0db099d9a13a61d03.svg) für die
für die  -ste
dividierte
Differenz der abgeschnittenen Potenzfunktion
-ste
dividierte
Differenz der abgeschnittenen Potenzfunktion  bzgl. .
Die dividierte Differenz
bzgl. .
Die dividierte Differenz ![{\displaystyle [x_{0},\ldots ,x_{d}]_{x}f(x)}](/svg/84760e1aee384cc93137ae193f5d6539c0b90d82.svg) ist der zu
ist der zu  gehörige Koeffizient im (eindeutig gegebenen) Polynom
gehörige Koeffizient im (eindeutig gegebenen) Polynom  ,
das die Funktion
,
das die Funktion  an den Stellen
an den Stellen  interpoliert. Stimmen die Werte von
der Variablen
interpoliert. Stimmen die Werte von
der Variablen  überein, so interpoliert das Polynom die Funktion
an dieser Stelle bis zur
überein, so interpoliert das Polynom die Funktion
an dieser Stelle bis zur  -ten
Ableitung (oskulierende Interpolation, engl.: `osculating interpolation').
-ten
Ableitung (oskulierende Interpolation, engl.: `osculating interpolation').
In obiger Definition von  gilt
gilt  für
für  solange
solange  kleiner
kleiner  bleibt. In diesem Bereich für
ergibt sich also eine dividierte Differenz vom Grad
bleibt. In diesem Bereich für
ergibt sich also eine dividierte Differenz vom Grad  für ein Polynom -ten
Grades, die trivialerweise null ist. Auf der anderen Seite ist für
für ein Polynom -ten
Grades, die trivialerweise null ist. Auf der anderen Seite ist für  die Funktion
die Funktion  an allen für die dividierte Differenz auszuwertenden Stellen bei
gleich null, womit dort ebenfalls
an allen für die dividierte Differenz auszuwertenden Stellen bei
gleich null, womit dort ebenfalls  gilt.
gilt.
Der Träger von
liegt also innerhalb des Intervalls ![{\displaystyle [\tau _{i},\tau _{i+p+1}]}](/svg/647481d7dfc8c8b57e60b328bebabb52fbb24926.svg) .
.
Sind die Stellen
alle voneinander verschieden, so ist die dividierte Differenz in  eine endliche Linearkombination von Funktionen
eine endliche Linearkombination von Funktionen  mit verschiedenen Werten für
mit verschiedenen Werten für  und als solche
und als solche  -mal
stetig differenzierbar.
-mal
stetig differenzierbar.
Eigenschaften
Die folgenden Eigenschaften zeichnen die B-Splines
mit  im Raum der Splines
im Raum der Splines  mit Knotenvektor
mit Knotenvektor  und Maximalgrad
aus:
und Maximalgrad
aus:
- Nicht-Negativität:

- Lokaler Träger:
 falls
falls ![{\displaystyle u\in {]\tau _{i},\tau _{i+p+1}[}}](/svg/3f70a9731d6eead5672954e4c13d0276ff9fce71.svg) und
falls
und
falls 
- Zerlegung
der Eins:
 für
für 
Effiziente Berechnung
Die Basis-Splines können effektiv mit der Rekursionsformel von de Boor/Cox/Mansfield berechnet werden:

und
 für
für  .
.
Die Elemente des Knotenvektors heißen auch Knotenpunkte (engl. knots)
und müssen die Bedingungen
und  erfüllen.
erfüllen.
Zur Berechnung der Ableitung eines B-Splines kann man obige Rekursionsformel mit der folgenden Vorschrift kombinieren:
 >
für
>
für  .
.
Bemerkung:
Die Bedingungen an die Knotenpunkte
erlauben es, dass in der Rekursionsformel unter Umständen 0 als Nenner auftritt
(nämlich wenn  bzw.
bzw.  gilt). Allerdings ist dann die Funktion
bzw.
gilt). Allerdings ist dann die Funktion
bzw.  automatisch die Nullfunktion.
Auf die entsprechende Fallunterscheidung wird hier verzichtet, man ignoriere
die entsprechenden Summanden in diesen Fällen (ersetze sie durch 0). Dies
entspricht auch dem Grenzverhalten für z.B.
automatisch die Nullfunktion.
Auf die entsprechende Fallunterscheidung wird hier verzichtet, man ignoriere
die entsprechenden Summanden in diesen Fällen (ersetze sie durch 0). Dies
entspricht auch dem Grenzverhalten für z.B. 
B-Spline-Kurve
Eine Spline-Kurve, deren Darstellung auf B-Splines beruht, nennt man B-Spline-Kurve. Bestimmt wird die Kurve durch so genannte De-Boor-Punkte, mit denen sich das Aussehen der Kurve leicht steuern lässt: Die Kurve liegt immer in der konvexen Hülle der De-Boor-Punkte, wird also von ihnen eingeschlossen.
Eine B-Spline-Kurve  des Maximalgrads
mit Knotenvektor
(s. o.) und Kontrollpunkten
des Maximalgrads
mit Knotenvektor
(s. o.) und Kontrollpunkten  (auch De-Boor-Punkte genannt) wird definiert durch
(auch De-Boor-Punkte genannt) wird definiert durch
 .
.
Für Kurven in der Ebene sind die Kontrollpunkte 2-dimensional, für Kurven im Raum 3-dimensional.
Eigenschaften:
- Lokalität: Der Kontrollpunkt
 beeinflusst die Kurve nur im Intervall
beeinflusst die Kurve nur im Intervall 
- Endpunkt-Interpolation: Es ist
 ,
falls die ersten
Knotenpunkte
,
falls die ersten
Knotenpunkte  gleich sind und
gleich sind und  ,
falls die letzten
Knotenpunkte
,
falls die letzten
Knotenpunkte  gleich sind.
gleich sind.
Eine ähnliche Darstellung haben Bézierkurven. Diese basieren nicht auf der oben genannten Basis, sondern auf den Bernsteinpolynomen. Genau wie bei B-Spline-Kurven die De-Boor-Punkte gibt es hier die Bézier-Punkte, die das so genannte Kontrollpolygon bilden und mit denen man die Kurve leicht graphisch darstellen kann.
Algorithmus von De Boor
Statt der Gleichung in obiger Definition für  wird zur effizienten Berechnung von B-Spline-Kurven
mit
im Intervall
wird zur effizienten Berechnung von B-Spline-Kurven
mit
im Intervall  meist der im Folgenden beschriebene Algorithmus von De Boor verwendet.
meist der im Folgenden beschriebene Algorithmus von De Boor verwendet.
1. Suche, so dass
gilt. Gibt es keinen solchen Index
, so liegt
und es muss extrapoliert oder eine Fehlermeldung ausgegeben werden. 2. Initialisiere Hilfsgrößen
für
3. Führe für
und
folgende Teilschritte 3.1 bis 3.3 iterativ aus: 3.1. Im Ausnahmefall gleicher Knoten
setze
und fahre mit dem nächsten Iterationsschritt
bei 3.1. fort. 3.2. Gilt dagegen
, so berechne
. 3.3. Berechne damit
. 4. Als Endergebnis der Iteration erhält man
.
Sind mehrere Splines, die sich nur durch die Koeffizienten
unterscheiden, an derselben Stelle
auszuwerten, so kann die in der Definition der B-Spline-Kurve aufgeführte
Berechnungsvorschrift  effizienter als der Algorithmus von De Boor sein.
effizienter als der Algorithmus von De Boor sein.
B-Spline-Fläche
Eine B-Spline-Fläche der Maximalgrade
und  in der ersten beziehungsweise zweiten Variablen mit Knotenvektoren
in der ersten beziehungsweise zweiten Variablen mit Knotenvektoren  und
und  und Kontrollpunkten (bzw. De Boor Punkten)
und Kontrollpunkten (bzw. De Boor Punkten)  wird definiert durch
wird definiert durch

Die Fläche ist definiert über dem Rechteck ![{\displaystyle [\tau _{p},\tau _{n-1-p}]\times [\mu _{q},\mu _{m-1-q}]}](/svg/bb9f29b71e02b677f88b135c496363d1251bdadd.svg) .
.
Eigenschaften:
- Lokalität: Der Kontrollpunkt
beeinflusst die Fläche nur im Rechteck
![[\tau _{{i}},\tau _{{i+p}}]\times [\mu _{{j}},\mu _{{j+q}}]](/svg/56f4f11e7393939ea713fa9b90b5faf6844ca952.svg)
- Endpunktinterpolation: Werden die ersten
Knotenpunkte in
auf den gleichen Wert gesetzt, die letzten
Knotenpunkte in
auf den gleichen Wert gesetzt, die ersten
 Knotenpunkte in
Knotenpunkte in  auf den gleichen Wert gesetzt und die letzten
Knotenpunkte in
auf den gleichen Wert gesetzt, dann gilt die Endpunktinterpolation, d. h.
auf den gleichen Wert gesetzt und die letzten
Knotenpunkte in
auf den gleichen Wert gesetzt, dann gilt die Endpunktinterpolation, d. h.
 ,
,
 ,
,
 und
und 
Weitere Varianten und Verallgemeinerungen
Neben den B-Splines gibt es weitere Varianten von Splines, beispielsweise den kubisch hermiteschen Spline. Eine Verallgemeinerung von Splines sind NURBS, die durch stückweise rationale Funktionen anstelle von Polynomen beschrieben werden. Mit NURBS-Kurven sind Kreise exakt darstellbar.
Literatur
- De Boor C. (1993): B(asic)–spline basics. In: Piegl L. (ed.): Fundamental Developments of Computer-Aided Geometric Modelling. Academic Press, San Diego, 27–49.
- Andrew Blake and Michael Isard: "Active Contours". Springer Verlag, 1998, ISBN 978-1-4471-1555-7
- David Salomon: Curves and Surfaces for Computer Graphics. 2006 Springer Science+Business Media, Inc.; ISBN 0-387-24196-5


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 29.10. 2020