Stabilitätstheorie
Die mathematische Stabilitätstheorie beschäftigt sich mit der Entwicklung von Störungen, die als Abweichung von bestimmten Zuständen dynamischer Systeme auftreten. Ein solcher Zustand kann etwa eine Ruhelage oder ein bestimmter Orbit sein, z.B. ein periodischer Orbit.
Neben ihrer theoretischen Bedeutung wird die Stabilitätstheorie in der Physik und in der Theoretischen Biologie angewendet sowie in technischen Gebieten, z.B. in der Technischen Mechanik oder der Regelungstechnik.
Die Lösungsansätze für die Probleme der Stabilitätstheorie sind gewöhnliche und partielle Differentialgleichungen.
Mathematische Stabilitätsbegriffe
Für die Charakterisierung der Stabilität der Ruhelage eines dynamischen
Systems  existieren mehrere Stabilitätsbegriffe mit jeweils etwas unterschiedlicher
Aussage:
existieren mehrere Stabilitätsbegriffe mit jeweils etwas unterschiedlicher
Aussage:
- Eine Ruhelage
 heißt Ljapunow-stabil,
wenn eine hinreichend kleine Störung auch stets klein bleibt. Präziser
formuliert: Für jedes
heißt Ljapunow-stabil,
wenn eine hinreichend kleine Störung auch stets klein bleibt. Präziser
formuliert: Für jedes  existiert ein
existiert ein  derart, dass für alle Zeiten
derart, dass für alle Zeiten  und alle Trajektorien
und alle Trajektorien
 mit
mit  gilt:
gilt:  .
. - Eine Ruhelage
heißt attraktiv, wenn es ein
 derart gibt, dass jede Trajektorie
mit
derart gibt, dass jede Trajektorie
mit  für alle
existiert und die folgende Grenzwertbedingung erfüllt:
für alle
existiert und die folgende Grenzwertbedingung erfüllt: 
- Eine Ruhelage heißt asymptotisch stabil, wenn sie Ljapunow-stabil und attraktiv ist.
- Eine Ruhelage heißt neutral stabil oder marginal stabil, wenn sie stabil, aber nicht asymptotisch stabil ist.
Für den Fall diskreter
Systeme, die durch Differenzengleichungen  beschrieben werden, ist die Ruhelage gleichzeitig Fixpunkt der
Rekursionsgleichung
und es sind ähnliche Stabilitätsdefinitionen üblich.
beschrieben werden, ist die Ruhelage gleichzeitig Fixpunkt der
Rekursionsgleichung
und es sind ähnliche Stabilitätsdefinitionen üblich.
Lineare zeitinvariante Systeme
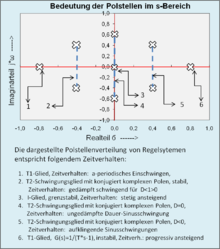
Bei linearen zeitinvarianten Systemen kann die Stabilität an der Übertragungsfunktion durch die Lage der Pole in der s-Ebene abgelesen werden:
- Asymptotische Stabilität: wenn sämtliche Pole in der linken s-Halbebene liegen,
- Grenzstabilität: wenn kein Pol in der rechten s-Halbebene liegt und mindestens ein einfacher Pol, aber kein mehrfacher Pol, auf der imaginären Achse der s-Halbebene liegt,
- Instabilität: sonst (wenn mindestens ein Pol in der rechten s-Halbebene liegt oder wenn mindestens ein mehrfacher Pol auf der imaginären Achse der s-Ebene liegt).
Direkte Methode von Ljapunow und Ljapunow-Funktion
Alexander Michailowitsch Ljapunow
entwickelte 1883 die sogenannte Direkte oder Zweite Methode (die Erste
Methode war die Linearisierung, siehe unten), um die oben genannten
Stabilitätseigenschaften an konkreten Systemen zu überprüfen. Hierzu definiert
man zunächst zu einem dynamischen System der Form
und einer reellwertigen differenzierbaren Funktion
 die orbitale Ableitung
die orbitale Ableitung
 .
.
Eine reellwertige differenzierbare Funktion  heißt Ljapunow-Funktion (für das Vektorfeld
heißt Ljapunow-Funktion (für das Vektorfeld  ),
wenn
),
wenn  für alle Punkte
für alle Punkte  aus dem Phasenraum gilt. Eine
Ljapunow-Funktion ist ein ziemlich starkes Hilfsmittel für einen
Stabilitätsbeweis, wie die folgenden beiden Kriterien zeigen:
aus dem Phasenraum gilt. Eine
Ljapunow-Funktion ist ein ziemlich starkes Hilfsmittel für einen
Stabilitätsbeweis, wie die folgenden beiden Kriterien zeigen:
- Erstes Kriterium von Ljapunow: Gegeben sei ein dynamisches System
.
Gelten die Bedingungen
-
ist eine Ruhelage des Systems,
-
ist eine Ljapunow-Funktion für ,
-
besitzt an der Stelle
ein striktes lokales Minimum,
- dann ist die Ruhelage
stabil.
- Zweites Kriterium von Ljapunow: Gilt zusätzlich zu den
Voraussetzungen des ersten Kriteriums noch
- 4. für
 in einer Umgebung der Ruhelage
gilt
in einer Umgebung der Ruhelage
gilt  ,
,
- 4. für
- dann ist die Ruhelage asymptotisch stabil.
Die Verwendung einer Ljapunow-Funktion nennt man Direkte Methode, weil
sich damit direkt aus dem Vektorfeld
ohne Kenntnis der Trajektorien (also ohne, dass man die Differentialgleichung
lösen müsste) Aussagen über die Stabilität einer Ruhelage gewinnen lassen.
Ljapunowgleichung
Für den Fall linearer Systeme  kann zum Beispiel immer eine positiv definite quadratische Form
kann zum Beispiel immer eine positiv definite quadratische Form  als Ljapunow-Funktion Verwendung finden. Sie erfüllt offensichtlich die obigen
Bedingungen (1) und (2). Bedingung (3) führt auf die Ljapunow-Gleichung
als Ljapunow-Funktion Verwendung finden. Sie erfüllt offensichtlich die obigen
Bedingungen (1) und (2). Bedingung (3) führt auf die Ljapunow-Gleichung
 ,
,
welche eine spezielle Form der Sylvester-Gleichung
ist. Falls  positiv definit ist, so ist
eine Ljapunow-Funktion. Für stabile lineare Systeme lässt sich eine solche
Funktion
immer finden.
positiv definit ist, so ist
eine Ljapunow-Funktion. Für stabile lineare Systeme lässt sich eine solche
Funktion
immer finden.
Stabilitätsanalyse linearer und nichtlinearer Systeme
Ein dynamisches System sei gegeben durch die Differentialgleichung .
Wir betrachten eine Störung  zum Zeitpunkt
zum Zeitpunkt  als Abweichung von der Ruhelage :
als Abweichung von der Ruhelage :
- wenn das System linear
ist, kann diese Störung vollständig durch die Jacobi-Matrix
 der ersten Ableitungen nach
ausgedrückt werden.
der ersten Ableitungen nach
ausgedrückt werden. - ist das System nichtlinear
und die Störung klein genug, so kann man es "linearisieren",
d.h. die Funktion
nach
 um
Taylor-entwickeln.
um
Taylor-entwickeln.
In beiden Fällen ergibt sich für die Zeitentwicklung
von :

Diese Entwicklung wird demnach maßgeblich von den Eigenwerten der Jacobi-Matrix bestimmt. Konkret ergeben sich die folgenden drei Fälle:
- Der Realteil aller Eigenwerte der Jacobi-Matrix ist negativ. Dann
fällt
exponentiell
ab, und die Ruhelage ist asymptotisch stabil.
- Der Realteil eines Eigenwertes der Jacobi-Matrix ist positiv. Dann
wächst
exponentiell an, und die Ruhelage ist instabil.
- Der größte Realteil aller Eigenwerte der Jacobi-Matrix ist Null.
Dies bedeutet für ein lineares System:
- falls für alle Eigenwerte mit verschwindendem Realteil die algebraische Vielfachheit gleich der geometrischen Vielfachheit ist: marginale Stabilität der Ruhelage.
- sonst, d.h. falls nicht für alle Eigenwerte mit verschwindendem Realteil die algebraische Vielfachheit gleich der geometrischen Vielfachheit ist: Instabilität der Ruhelage.
- Bei nichtlinearen Systemen, die nur um die Ruhelage linearisiert wurden, kann die Stabilität auch noch von Termen höherer Ordnung in der Taylorentwicklung bestimmt werden. In diesem Fall vermag die lineare Stabilitätstheorie keine Aussage zu machen.
Siehe auch Autonome Differentialgleichung.
Beispiel
Ein untersuchter Verformungszustand der Festigkeitslehre oder ein Bewegungszustand der Dynamik können ab einer zu bestimmenden Stabilitätsgrenze in einen anderen Zustand wechseln. Damit verbunden sind in der Regel nichtlinear ansteigende Verformungen oder Bewegungen, die zur Zerstörung von Tragwerken führen können. Um diese zu vermeiden, ist die Kenntnis der Stabilitätsgrenze ein wichtiges Kriterium zur Bemessung von Bauteilen.
Weitere Beispiele:
- Stabilitätsprüfung von Regelkreisen,
- Dynamik von Insektenpopulationen,
- Eulerscher Knickstab,
- Kippen von schlanken Trägern,
- Beulen von Platten und Schalen,
- Wachstum kleiner Störungen in einer Grenzschicht, die zum laminar-turbulenten Umschlag führen.
Siehe auch
- Eigenbewegung (Regelungstechnik)
- Lineare Stabilitätstheorie zur Stabilitätstheorie in der Strömungslehre


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 26.01. 2021