Gleichgewicht (Systemtheorie)
Im allgemeinen Sinn ist ein System im Gleichgewicht, wenn es sich ohne Einwirkung von außen zeitlich nicht verändert. Bei dynamischen Gleichgewichten werden im Allgemeinen nur makroskopische Veränderungen betrachtet. Bei einem thermodynamischen Gleichgewicht ist beispielsweise der Makrozustand eines Gases mit den Zustandsgrößen Druck, Temperatur und chemisches Potential konstant, während sich der Mikrozustand, also die Position und Geschwindigkeit einzelner Gasteilchen ändern kann.
Der Zustand, den das System ohne Einwirkung von außen nicht verlässt, wird allgemein Gleichgewichtszustand, kritischer Punkt, Fixpunkt, stationärer Zustand, Gleichgewichtslage oder Ruhelage genannt. Je nach Kontext, werden die genannten Begriffe nicht synonym verwendet, sondern beinhalten eine zusätzliche Klassifizierung des Zustands, etwa hinsichtlich der Stabilität. Bei der Betrachtung von offenen Systemen, wird ein sich nicht ändernder Zustand als „stationärer Zustand“ bezeichnet, während der Begriff „Gleichgewicht“ für einen stationären Zustand nach Isolierung des Systems gebraucht wird.
Allgemeine Definition
Betrachtet wird zunächst ein abgeschlossenes dynamisches System.
Der Zustand eines dynamischen Systems zum Zeitpunkt  ,
lässt sich allgemein durch ein Tupel
,
lässt sich allgemein durch ein Tupel  beschreiben, also eine geordnete Menge aller Zustandsgrößen. Damit der Zustand
ein Gleichgewichtszustand ist, muss dieser für alle Zeiten gleich sein, man sagt
auch „invariant gegenüber einer Dynamik
beschreiben, also eine geordnete Menge aller Zustandsgrößen. Damit der Zustand
ein Gleichgewichtszustand ist, muss dieser für alle Zeiten gleich sein, man sagt
auch „invariant gegenüber einer Dynamik  “.
“.
Die Lage und Anzahl der Gleichgewichtszustände eines Systems ist unabhängig davon, in welchem Zustand das System sich befindet, also auch unabhängig davon, ob es „im Gleichgewicht“ ist oder nicht. Die Gleichgewichtszustände ergeben sich als Lösungen der Gleichgewichtsbedingungen. Je nach Anzahl an Lösungen der Gleichungen für die jeweilige Gleichgewichtsbedingung, kann ein System beliebig viele Gleichgewichtszustände besitzen.
Kontinuierliches dynamisches System
Für ein kontinuierliches dynamisches System, dessen Zeitentwicklung gegeben ist durch die Differentialgleichung

ist ein Gleichgewichtszustand  gegeben durch die Gleichgewichtsbedingung
gegeben durch die Gleichgewichtsbedingung

da dann entsprechend die zeitliche Ableitung  ist. Ein Gleichgewichtszustand ist also eine zeitunabhängige Lösung der gewöhnlichen
Differentialgleichung bzw. eine Nullstelle der Funktion .
ist. Ein Gleichgewichtszustand ist also eine zeitunabhängige Lösung der gewöhnlichen
Differentialgleichung bzw. eine Nullstelle der Funktion .
Diskretes dynamisches System
Ein diskretes dynamisches System, welches nur diskrete Zeitschritte erlaubt, lässt sich durch eine iterierte Abbildung

beschreiben. Die Gleichgewichtsbedingung für den Gleichgewichtszustand  ist
ist

Der Gleichgewichtspunkt
ist also ein zeitunabhängiger Fixpunkt
der Abbildung .
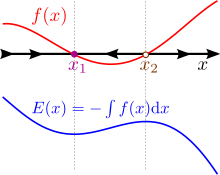
Gleichgewichtszustand und Potential
Anstelle der Nullstellen der Funktion
zu betrachten, lässt sich für viele Systeme ein Potential
 finden, sodass
finden, sodass  sich als negativer Gradient des Potentials schreiben lässt. Ein
Gleichgewichtszustand entspricht dann einem Extrempunkt des Potentials.
Bei einem thermodynamischen
System ist dies ein geeignetes thermodynamisches
Potential. Zum Beispiel eignet sich für ein System bei konstanter Temperatur
und Druck, wie eine chemische Reaktion, die Gibbs freie
Enthalpie, welche minimal ist, wenn das System im thermodynamischen
Gleichgewicht ist.
sich als negativer Gradient des Potentials schreiben lässt. Ein
Gleichgewichtszustand entspricht dann einem Extrempunkt des Potentials.
Bei einem thermodynamischen
System ist dies ein geeignetes thermodynamisches
Potential. Zum Beispiel eignet sich für ein System bei konstanter Temperatur
und Druck, wie eine chemische Reaktion, die Gibbs freie
Enthalpie, welche minimal ist, wenn das System im thermodynamischen
Gleichgewicht ist.
In der
Mechanik wird der Ort mit den Koordinaten  des Gleichgewichtszustandes auch Ruhelage oder statische Ruhelage
genannt. Insbesondere erfährt ein Teilchen in der Ruhelage keinerlei Kraft.
„Ruhelage“ ist in dieser Hinsicht etwas irreführend: Zwar wirkt auf ein Teilchen
in der Ruhelage keine Kraft, das Teilchen muss sich dort allerdings keinesfalls
in Ruhe befinden. Erst bei einem statischen Zustand, bei dem die
Gleichgewichtsbedingung auch für die Impulse erfüllt ist, ist das Teilchen dort
in Ruhe und das System im Gleichgewicht.
des Gleichgewichtszustandes auch Ruhelage oder statische Ruhelage
genannt. Insbesondere erfährt ein Teilchen in der Ruhelage keinerlei Kraft.
„Ruhelage“ ist in dieser Hinsicht etwas irreführend: Zwar wirkt auf ein Teilchen
in der Ruhelage keine Kraft, das Teilchen muss sich dort allerdings keinesfalls
in Ruhe befinden. Erst bei einem statischen Zustand, bei dem die
Gleichgewichtsbedingung auch für die Impulse erfüllt ist, ist das Teilchen dort
in Ruhe und das System im Gleichgewicht.
Verhalten von Gleichgewichten bei Störungen
Die zeitliche Entwicklung eines dynamischen Systems lässt sich qualitativ durch Charakterisieren der Gleichgewichtszustände abschätzen. Ein Gleichgewichtszustand lässt sich grob einteilen in
- stabil
- Das System kehrt nach einer Störung wieder in seinen Ausgangszustand zurück.
- labil
- Das System geht bei der kleinsten Störung in einen anderen Zustand über.
- indifferent
- Das System kommt nach jeder Störung in einem neuen Zustand zur Ruhe.
- metastabil
- Das System geht nach einer ausreichend großen Störung in einen stabileren Gleichgewichtszustand über. Bei zwei Gleichgewichtszuständen spricht man auch von bistabil.
-
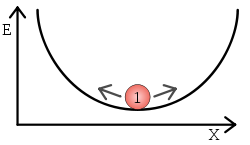 stabiles Gleichgewicht
stabiles Gleichgewicht -
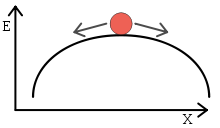 labiles Gleichgewicht
labiles Gleichgewicht -
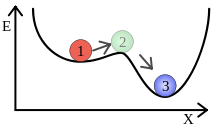 metastabiles Gleichgewicht
metastabiles Gleichgewicht -
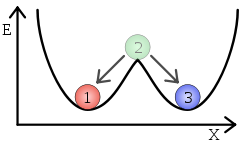 bistabiles Gleichgewicht
bistabiles Gleichgewicht -
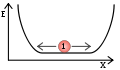 indifferentes Gleichgewicht
indifferentes Gleichgewicht
Zur mathematisch exakten Einteilung gibt es in der Stabilitätstheorie mehrere Stabilitätsbegriffe. Im Folgenden wird ein kontinuierliches System angenommen, ähnliche Begriffe lassen sich auch für Systeme mit diskreten Zeitschritten definieren.
- Ljapunov-stabil
- Ein Gleichgewichtszustand
 ist Ljapunov-stabil, wenn eine hinreichend kleine Störung stets klein bleibt
oder präziser: Für jedes
ist Ljapunov-stabil, wenn eine hinreichend kleine Störung stets klein bleibt
oder präziser: Für jedes  existiert ein
existiert ein  derart, dass für alle Zeiten
derart, dass für alle Zeiten  und alle Trajektorien
und alle Trajektorien  mit
mit  gilt:
gilt:  .
. - asymptotisch stabil
- Ein Gleichgewichtszustand
ist asymptotisch stabil, wenn er Ljapunov-stabil und attraktiv ist, also bei
einer Störung wieder in den Gleichgewichtszustand zurückkehrt. Attraktiv
bedeutet, dass es ein
 gibt, sodass jede Trajektorie
mit
gibt, sodass jede Trajektorie
mit  für alle
existiert und die Bedingung
für alle
existiert und die Bedingung  erfüllt.
erfüllt.
Eine Methode zur Stabilitätsanalyse ist, das System um den Gleichgewichtszustand zu linearisieren. Mit dem Satz von Hartman-Grobman lässt sich der Gleichgewichtszustand dann anhand der Eigenwerte der Jacobi-Matrix charakterisieren.
Beispiele
Thermisches Gleichgewicht bei einem Haus
Der zeitliche Verlauf der Temperatur  in einem ungeheizten Haus in Abhängigkeit von der Außentemperatur
in einem ungeheizten Haus in Abhängigkeit von der Außentemperatur  lässt sich in einem einfachen Modell durch die Differentialgleichung
lässt sich in einem einfachen Modell durch die Differentialgleichung

beschreiben. Die Konstante  berechnet sich aus Fläche
berechnet sich aus Fläche  ,
Wärmeübergangskoeffizient
,
Wärmeübergangskoeffizient
 der Hauswände sowie der Wärmekapazität
der Hauswände sowie der Wärmekapazität
 der Luft. Die Funktion
der Luft. Die Funktion  auf der rechten Seite der Gleichung bestimmt die Dynamik des Systems. Für einen
Gleichgewichtszustand
auf der rechten Seite der Gleichung bestimmt die Dynamik des Systems. Für einen
Gleichgewichtszustand  gilt
gilt
 .
.
Das System besitzt also einen Gleichgewichtszustand bei  .
Da die Ableitung
.
Da die Ableitung

negativ ist, ist der Gleichgewichtszustand
stabil. Wenn das Haus wärmer bzw. kälter als die Umgebung ist, kühlt bzw. wärmt
es sich solange auf, bis es diesen Gleichgewichtszustand erreicht. Auf diese
Weise lassen sich durch die Bestimmung der Gleichgewichtspunkte und deren
Stabilität Aussagen über das Verhalten des Systems treffen, ohne explizit den
zeitlichen Verlauf  der Temperatur berechnen zu müssen. Die Integration der Gleichung, die für diese
explizite Berechnung notwendig wäre, ist bei nichtlinearen Systemen im
Allgemeinen nicht einfach oder analytisch nicht möglich.
der Temperatur berechnen zu müssen. Die Integration der Gleichung, die für diese
explizite Berechnung notwendig wäre, ist bei nichtlinearen Systemen im
Allgemeinen nicht einfach oder analytisch nicht möglich.
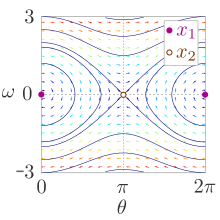
Mechanisches Gleichgewicht bei einem ebenen Pendel

Ein ebenes
Pendel ist ein mechanisches System, bei dem eine Masse mit einer
Pendelstange fester Länge  drehbar in einem Punkt befestigt ist. Der Zustand
drehbar in einem Punkt befestigt ist. Der Zustand  eines solchen Pendels zu einem festen Zeitpunkt
lässt sich durch einen Winkel
eines solchen Pendels zu einem festen Zeitpunkt
lässt sich durch einen Winkel  und der Winkelgeschwindigkeit
und der Winkelgeschwindigkeit
 beschreiben. Die Bewegungsgleichung
ist dann die autonome
Differentialgleichung
beschreiben. Die Bewegungsgleichung
ist dann die autonome
Differentialgleichung

wobei die Konstante  die Fallbeschleunigung
ist.
die Fallbeschleunigung
ist.
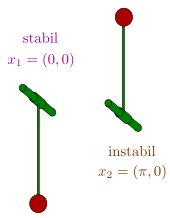
Das System hat damit zwei Gleichgewichtspunkte  und
und  ,
welche die Gleichgewichtsbedingung erfüllen. Der Gleichgewichtspunkt
,
welche die Gleichgewichtsbedingung erfüllen. Der Gleichgewichtspunkt  bei einem Winkel von Null ist das stabile Gleichgewicht, wenn das Pendel keine
Auslenkung und Geschwindigkeit besitzt. Der zweite Punkt
bei einem Winkel von Null ist das stabile Gleichgewicht, wenn das Pendel keine
Auslenkung und Geschwindigkeit besitzt. Der zweite Punkt  ist das instabile Gleichgewicht, wenn das Pendel keine Geschwindigkeit besitzt
und „auf dem Kopf“ steht. Im Phasenraum
ist
ein elliptischer
Fixpunkt, der Punkt
ein hyperbolischer
Fixpunkt.
ist das instabile Gleichgewicht, wenn das Pendel keine Geschwindigkeit besitzt
und „auf dem Kopf“ steht. Im Phasenraum
ist
ein elliptischer
Fixpunkt, der Punkt
ein hyperbolischer
Fixpunkt.
In einem statischen System, also ein System bei dem das Pendel keine Geschwindigkeit
besitzt, lässt sich die Bedingung für ein mechanisches
Gleichgewicht mithilfe von Kräften
und Momenten formulieren. So ist
das Pendel im Gleichgewicht, wenn die Summe aller angreifenden Kräfte und
Momente Null ist. In beiden Gleichgewichtspunkten
und
wird die Gewichtskraft
der Masse am Pendel durch die Kraft, mit der die Pendelstange die Masse am
Drehpunkt festhält, vollständig ausgeglichen. Die resultierende Kraft und das
resultierende Moment sind Null.
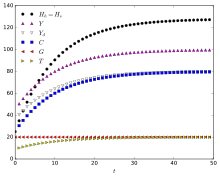
Ökologisches Gleichgewicht bei einer Räuber-Beute Beziehung
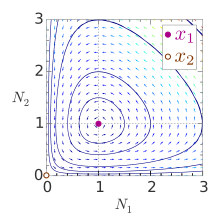
Ein einfaches Modell der Wechselwirkung zwischen Räuber- und
Beutepopulationen sind die Lotka-Volterra-Gleichungen.
Sie beschreiben die zeitliche Entwicklung einer Anzahl an Beutetieren  und Räubern
und Räubern  .
Mit den jeweiligen Reproduktions- und Sterberaten
.
Mit den jeweiligen Reproduktions- und Sterberaten  bzw.
bzw.  und
und  bzw.
bzw.  ergibt sich das Differentialgleichungssystem für einen Zustand
ergibt sich das Differentialgleichungssystem für einen Zustand  :
:

Das System besitzt einen stabilen Gleichgewichtspunkt  und einen instabilen Gleichgewichtspunkt
und einen instabilen Gleichgewichtspunkt  .
Im Zustand
gibt es eine konstante Anzahl an Räubern und Beutetieren, die in einem ökologischen
Gleichgewicht sind. Im Zustand
sind beide Populationen ausgerottet.
.
Im Zustand
gibt es eine konstante Anzahl an Räubern und Beutetieren, die in einem ökologischen
Gleichgewicht sind. Im Zustand
sind beide Populationen ausgerottet.
Dynamische Gleichgewichte
Ein System in der Natur lässt sich im Allgemeinen unterschiedlich beschreiben. So gibt es unterschiedlich detaillierte Möglichkeiten die Zustandsgrößen des Systems zu wählen. In der Statistischen Physik gibt es zur Unterscheidung unterschiedlich detaillierter Beschreibungen die Bezeichnungen Makrozustand und Mikrozustand. Bei Gleichgewichtsbetrachtungen, etwa bei einem thermodynamischen Gleichgewicht, wird nur der Makrozustand betrachtet. Das System ist im Gleichgewicht, wenn sich der Makrozustand nicht ändert. Der Mikrozustand des Systems kann sich jedoch ändern.
Gibt es Prozesse innerhalb des Systems oder Flüsse über die Systemgrenzen hinweg, die den Mikrozustand ändern, sich in ihrem Einfluss auf den Makrozustand des Systems gegenseitig aufheben, wird ein Gleichgewicht als dynamisches Gleichgewicht oder Fließgleichgewicht bezeichnet.
Dynamisches Gleichgewicht in einem geschlossenen System
Im Fall nicht-offener Systeme sind es nur innere Prozesse, die Einfluss auf die Zustandsgrößen des Systems haben. Die oben formulierte Gleichgewichtsbedingung ist in Systemen chemischer Reaktionen genau dann erfüllt, wenn die chemischen Potentiale ausgeglichen sind. Beispiel: Ein thermisch isolierter Drucktopf mit heißem Wasser und Wasserdampf. Die beiden beteiligten Reaktionen heißen Verdampfung und Kondensation. Verdampfung senkt die Temperatur und steigert den Druck, was weitere Verdampfung verlangsamt bzw. die Kondensation beschleunigt. Nach einiger Zeit stellt sich ein Gleichgewicht ein, in dem beide Reaktionen gleich schnell verlaufen und die Zustandsgrößen Druck, Temperatur und Dampfmenge konstant bleiben.
Für Systeme in dynamischem Gleichgewicht gilt der Virialsatz im jeweiligen Teilgebiet der Physik. Die explizite Kenntnis von Bahnen ist dafür nicht erforderlich.
Quasistatische Zustandsänderungen
Im Allgemeinen gibt es mehr als zwei Reaktionen, die gleichzeitig ablaufen. Das Gleichgewicht kann dann zwischen allen beteiligten Elementen des Systems bestehen oder sich auf ein Teilsystem beschränken. Sind die Prozesse des Teilsystems schnell gegenüber Austauschprozessen mit der Umgebung, so treten quasistatische Zustandsänderungen auf. Beispiel: Der langsam abkühlende Drucktopf. Die Abgabe von Wärme an die Umgebung senkt die Temperatur, den Druck und die Dampfmenge, aber nicht unabhängig voneinander, sondern der Systemzustand bleibt stets nahe an der Dampfdruckkurve.
Ob es in einem speziellen Fall eine Trennung in schnelle und langsame Prozesse gibt und wie die Änderungen der Zustandsgrößen zeitlich verlaufen, ist Gegenstand der Kinetik.
Fließgleichgewichte in offenen Systemen
Existieren mehrere Kopplungsprozesse mit der Umgebung, so kann der Zustand des Systems konstant bleiben, indem sich diese mehr oder weniger zufällig in ihrer Wirkung aufheben. Fließgleichgewichte sind stets mit einer Produktion von Entropie verbunden, die für einen stationären Zustand abgeführt werden muss.
Enge Kopplung
Dominiert ein Kopplungsprozess die anderen Prozesse, so ist der Zustand des Teilsystems in der betroffenen Zustandsgröße festgelegt. Beispiele: Der Topf ist offen, der Druck ist auf den atmosphärischen Druck festgelegt, selbst große Heizleistung erhöht die Temperatur nicht über den Siedepunkt, solange noch Wasser im Topf ist. In der Elektrotechnik ist bei Anschluss eines Kleinverbrauchers an eine Spannungsquelle die Spannung festgelegt (geklemmt). Ein ökonomisches Beispiel ist die Buchpreisbindung (für Werke ohne Alternative, etwa spezielle Fachbücher).
Fließgleichgewicht im rückwirkungsfreien System
Ohne enge Kopplung werden Systeme meist mit deutlichen Änderungen ihres Zustandes auf Änderungen in der Umgebung reagieren. Die Bezeichnung Fließgleichgewicht legt folgendes Beispiel nahe: Der Füllstand einer Badewanne ohne Stöpsel wird sich bei gegebenem Zufluss so einpegeln, dass der vom Pegel abhängige Abfluss dem Zufluss gleich ist. Fließgleichgewichte gibt es aber auch mit vielen anderen physikalischen und nicht-physikalischen Größen, etwa Energie oder Reichtum.
Homöostatisches Gleichgewicht
Die Flüsse über die Systemgrenze können auch dadurch ausgeglichen werden, indem das System durch interne Regelungsprozesse auf sie Einfluss nimmt. Das Teilsystem eines komplexen Systems, das den Regelungsmechanismus bildet, nennt die Systemtheorie allgemein Homöostat, das prototypische Beispiel ist der Thermostat.
Der Begriff Homöostase wurde im Zusammenhang mit lebenden Systemen geprägt, in denen meist viele Systemparameter einer Regelung unterliegen: pH-Wert, osmotischer Druck, Enzymkonzentrationen, Temperatur, Zellenzahl – um nur einige zu nennen.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 24.05. 2026