Stabilitätsfunktion
Die Stabilitätsfunktion ist in der Numerik ein Hilfsmittel, um
Lösungsverfahren für gewöhnliche
Differentialgleichungen zu analysieren. Die einfache Testgleichung von Germund Dahlquist
 mit
mit  besitzt als Lösung die Exponentialfunktion
besitzt als Lösung die Exponentialfunktion
 .
Bei den meisten Verfahren für gewöhnliche Differentialgleichungen kann man die
berechnete Näherungslösung nach einem Zeitschritt mit einer Schrittweite
.
Bei den meisten Verfahren für gewöhnliche Differentialgleichungen kann man die
berechnete Näherungslösung nach einem Zeitschritt mit einer Schrittweite  ebenfalls als eine Funktion schreiben, die nur vom Produkt
ebenfalls als eine Funktion schreiben, die nur vom Produkt  abhängt. Diese Funktion ist die Stabilitätsfunktion und wird oft mit
abhängt. Diese Funktion ist die Stabilitätsfunktion und wird oft mit  bezeichnet. Durch einen Vergleich mit der Exponentialfunktion
bezeichnet. Durch einen Vergleich mit der Exponentialfunktion  bekommt man grundlegende Informationen über das numerische Verfahren. So
beziehen sich einige Stabilitätsbegriffe auf die Eigenschaften von .
bekommt man grundlegende Informationen über das numerische Verfahren. So
beziehen sich einige Stabilitätsbegriffe auf die Eigenschaften von .
Stabilitätsgebiet und Stabilitätsbegriffe
Mit Hilfe der Stabilitätsfunktion
lässt sich das Stabilitätsgebiet
 beschreiben und berechnen in der Form
beschreiben und berechnen in der Form

Denn bei Einschrittverfahren
gilt für die Näherungen  zum Zeitpunkt
zum Zeitpunkt  die Beziehung
die Beziehung  und daher gilt
und daher gilt

Wenn
die ganze linke komplexe Halbebene umfasst, heißt das Verfahren A-stabil. Dann ist
der Betrag von  in der ganzen offenen linken Halbebene kleiner als 1. Besonders günstig für ein
Verfahren ist es, wenn
außerdem noch den Grenzwert 0 hat, wenn
in der ganzen offenen linken Halbebene kleiner als 1. Besonders günstig für ein
Verfahren ist es, wenn
außerdem noch den Grenzwert 0 hat, wenn  auf der reellen Achse gegen
auf der reellen Achse gegen  strebt, sodass sich also der Betrag von
dort asymptotisch wie die Exponentialfunktion
verhält. Dann heißt das Verfahren L-stabil.
strebt, sodass sich also der Betrag von
dort asymptotisch wie die Exponentialfunktion
verhält. Dann heißt das Verfahren L-stabil.
Beispiel
Das explizite
Euler-Verfahren  ergibt für die Testgleichung mit
ergibt für die Testgleichung mit  nach einem Schritt
nach einem Schritt
 ,
,
also gilt für seine Stabilitätsfunktion  .
Sein Stabilitätsgebiet besteht daher aus allen komplexen Zahlen
mit
.
Sein Stabilitätsgebiet besteht daher aus allen komplexen Zahlen
mit  ,
was dem Inneren des Kreises mit Mittelpunkt
,
was dem Inneren des Kreises mit Mittelpunkt  und Radius
und Radius  in der komplexen Zahlenebene entspricht.
in der komplexen Zahlenebene entspricht.
Für das implizite
Euler-Verfahren  folgt dagegen mit
folgt dagegen mit
 ,
,
also  .
Das Stabilitätsgebiet ist nun durch die Bedingung
.
Das Stabilitätsgebiet ist nun durch die Bedingung  gegeben, die mit
gegeben, die mit

gleichwertig ist, was dem Äußeren des Kreises mit Mittelpunkt
und Radius
entspricht. Es enthält daher die ganze offene linke Halbebene und somit ist das
implizite Euler-Verfahren A-stabil. Wegen  ist es sogar L-stabil.
ist es sogar L-stabil.
Die Stabilitätsfunktion von Runge-Kutta-Verfahren
Runge-Kutta-Verfahren
sind vollständig durch die Koeffizienten  aus ihrem Butcher-Tableau festgelegt. Bei der Testgleichung ist der Anfangswert
aus ihrem Butcher-Tableau festgelegt. Bei der Testgleichung ist der Anfangswert
 und für die Stufen ergibt sich im ersten Zeitschritt
und für die Stufen ergibt sich im ersten Zeitschritt

Dies ist ein quadratisches lineares
Gleichungssystem für den Vektor  in der Form
in der Form  mit dem Vektor
mit dem Vektor  Mit dessen Lösung bekommt man dann die Runge-Kutta-Näherung
Mit dessen Lösung bekommt man dann die Runge-Kutta-Näherung  in der Form
in der Form

Dies ist bei Runge-Kutta-Verfahren eine rationale Funktion, daher wird sie
gerne mit
bezeichnet.
Bei expliziten Runge-Kutta-Verfahren ist die Koeffizientenmatrix  eine strikt untere Dreiecksmatrix,
daher bricht die Neumann-Reihe
von
eine strikt untere Dreiecksmatrix,
daher bricht die Neumann-Reihe
von  nach s Summanden ab und man bekommt
nach s Summanden ab und man bekommt

Daher ist die Stabilitätsfunktion eines expliziten Runge-Kutta-Verfahrens ein Polynom, solche Verfahren können nicht A-stabil sein.
Bei impliziten Runge-Kutta-Verfahren sind aber z.B. die Gauß-Legendre-Verfahren A-stabil. Die Stabilitätsfunktionen dieser speziellen Verfahren sind sogar sehr gute Approximationen an die Exponentialfunktion, nämlich die sogenannten Padé-Approximationen.
Die Stabilitätsfunktion von Mehrschrittverfahren
Wendet man ein lineares Mehrschrittverfahren
 auf die Testgleichung an, ergibt sich wieder mit
auf die Testgleichung an, ergibt sich wieder mit  die Gleichung
die Gleichung

Dies ist eine lineare
Differenzengleichung, die man einfach lösen kann. Denn die Folge  ist eine nichttriviale Lösung dieser Differenzengleichung, wenn u eine
Nullstelle des charakteristischen Polynoms
ist eine nichttriviale Lösung dieser Differenzengleichung, wenn u eine
Nullstelle des charakteristischen Polynoms

ist, wobei man die Polynome


eingeführt hat. Also bekommt man mit den von
abhängenden Nullstellen  des Polynoms
des Polynoms  die Lösungen
die Lösungen  zur Testgleichung und daher liegt
im Stabilitätsgebiet
des Verfahrens, wenn alle diese Lösungen gegen 0 gehen für
zur Testgleichung und daher liegt
im Stabilitätsgebiet
des Verfahrens, wenn alle diese Lösungen gegen 0 gehen für  .
Daher kann man die betragsmaximale Nullstelle
.
Daher kann man die betragsmaximale Nullstelle  als Stabilitätsfunktion des Verfahrens ansehen.
als Stabilitätsfunktion des Verfahrens ansehen.
Diese Interpretation erscheint sehr unhandlich. Allerdings interessiert man
sich oft weniger für die Stabilitätsfunktion, sondern für das Stabilitätsgebiet
.
Der Rand dieses Gebietes besteht aus denjenigen  ,
bei dem für die Nullstellen
,
bei dem für die Nullstellen  gilt, wo die Nullstellen also auf dem komplexen Einheitskreis liegen. Da
gilt, wo die Nullstellen also auf dem komplexen Einheitskreis liegen. Da  gilt, ist die Bestimmung des Stabilitätsgebiets bei Mehrschrittverfahren sogar
besonders einfach, denn seinen Rand erhält man i.W. explizit durch
gilt, ist die Bestimmung des Stabilitätsgebiets bei Mehrschrittverfahren sogar
besonders einfach, denn seinen Rand erhält man i.W. explizit durch

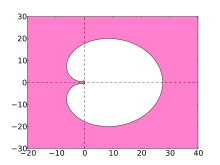
Als Beispiel wird das Stabilitätsgebiet für das 6-stufige BDF-Verfahren gezeigt.
Die Stabilitätsfunktion von allgemeinen linearen Verfahren
Obwohl auch Mehrschrittverfahren
in der Gestalt von allgemeinen
linearen Verfahren geschrieben werden können, ist die Struktur ähnlich
derjenigen der Runge-Kutta-Verfahren
weiter oben.
Daher bekommt man ein ähnliches Ergebnis. Für den Vektor  der Stufenlösungen gilt
der Stufenlösungen gilt
![{\displaystyle Y=zAY+Uy^{[n-1]}\quad \Rightarrow Y=(I-zA)^{-1}Uy^{[n-1]}}](/svg/c42c652d7fab80eea9bdb550278be9fcdf94b6ef.svg)
und der Zeitschritt wird daher zu
![{\displaystyle y^{[n]}=zBY+Vy^{[n-1]}=(V+zB(I-zA)^{-1}U{\big )}y^{[n-1]}.}](/svg/2103de9fe45c2b1a5531849e52f2b3d046ca4c8b.svg)
In jedem Zeitschritt erfolgt also die Multiplikation mit derselben Matrix

Es gilt daher ![{\displaystyle y^{[n]}=M(z)^{n}y^{[0]}\to 0\,(n\to \infty )}](/svg/e44afdd17b14531c597ce322a00d6d310c72b666.svg) ,
wenn die Potenzen von
,
wenn die Potenzen von  gegen 0 gehen, also alle Eigenwerte
von
innerhalb des komplexen Einheitskreises liegen. Daher kann man hier den Spektralradius von
als Stabilitätsfunktion
in der Definition des Stabilitätsgebiets
ansehen.
gegen 0 gehen, also alle Eigenwerte
von
innerhalb des komplexen Einheitskreises liegen. Daher kann man hier den Spektralradius von
als Stabilitätsfunktion
in der Definition des Stabilitätsgebiets
ansehen.
Weitergehende Bedeutung für lineare Systeme
Die obige Testgleichung von Dahlquist ist sehr einfach, hat aber eine weitergehende Bedeutung für Systeme von linearen, autonomen und homogenen Differentialgleichungen

Die exakte Lösung ist  mit dem Matrixexponential
mit dem Matrixexponential
 .
Die numerische Lösung
kann man jetzt mit der Matrix-Stabilitätsfunktion
.
Die numerische Lösung
kann man jetzt mit der Matrix-Stabilitätsfunktion  darstellen. Wenn dabei
darstellen. Wenn dabei  die Jordan-Normalform
von
die Jordan-Normalform
von  ist, gilt
ist, gilt

Bei einer diagonalisierbaren Matrix  ist, ist
ist, ist  eine Diagonalmatrix
mit den Diagonalelementen
eine Diagonalmatrix
mit den Diagonalelementen  .
Wenn für alle Eigenwerte
.
Wenn für alle Eigenwerte
 von
gilt, dass
von
gilt, dass  ist, dann konvergiert auch hier
ist, dann konvergiert auch hier  .
Bei dieser Differentialgleichung sieht man gleichzeitig, dass es sinnvoll ist,
als offene Menge zu definieren. Denn im diagonalisierbaren Fall bleiben zwar
Lösungen auf dem Rand mit
.
Bei dieser Differentialgleichung sieht man gleichzeitig, dass es sinnvoll ist,
als offene Menge zu definieren. Denn im diagonalisierbaren Fall bleiben zwar
Lösungen auf dem Rand mit  noch beschränkt, aber im Allgemeinen nicht mehr, wenn mehrfache Eigenwerte mit
Jordanblöcken auftreten.
noch beschränkt, aber im Allgemeinen nicht mehr, wenn mehrfache Eigenwerte mit
Jordanblöcken auftreten.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 30.09. 2019