Natürliche Matrixnorm
Eine natürliche Matrixnorm, induzierte Matrixnorm oder Grenzennorm ist in der Mathematik eine von einer Vektornorm als Operatornorm abgeleitete Matrixnorm. Eine natürliche Matrixnorm entspricht anschaulich dem größtmöglichen Streckungsfaktor, der durch die Anwendung der Matrix auf einen Vektor entsteht. Natürliche Matrixnormen sind immer submultiplikativ und mit der Vektornorm, aus der sie abgeleitet wurden, verträglich. Sie sind sogar unter allen mit dieser Vektornorm verträglichen Matrixnormen die kleinsten. Wichtige natürliche Matrixnormen sind die Zeilensummennorm, die Spektralnorm und die Spaltensummennorm Natürliche Matrixnormen werden insbesondere in der linearen Algebra und der numerischen Mathematik verwendet.
Definition
Eine Matrixnorm  heißt von einer Vektornorm
heißt von einer Vektornorm
 induziert oder natürliche Matrixnorm, wenn sie von ihr als Operatornorm abgeleitet
ist. Die natürliche Matrixnorm einer reellen
oder komplexen Matrix
induziert oder natürliche Matrixnorm, wenn sie von ihr als Operatornorm abgeleitet
ist. Die natürliche Matrixnorm einer reellen
oder komplexen Matrix  ist damit definiert als
ist damit definiert als
 ,
,
wobei die Norm im Zähler als Argument einen Vektor
 und die Norm im Nenner als Argument einen Vektor
und die Norm im Nenner als Argument einen Vektor  besitzt. Da es zu jedem Vektor
besitzt. Da es zu jedem Vektor  mit
mit  einen auf Eins
normierten Vektor gibt, hat jede natürliche Matrixnorm auch die Darstellung
einen auf Eins
normierten Vektor gibt, hat jede natürliche Matrixnorm auch die Darstellung
 ,
,
es reicht also aus, das Maximum über alle Einheitsvektoren zu betrachten. Anschaulich entspricht damit die natürliche Matrixnorm dem größtmöglichen Streckungsfaktor, der durch die Anwendung der Matrix auf einen Einheitsvektor entsteht. Eine äquivalente Definition der natürlichen Matrixnorm ist

oder analog dazu
 ,
,
also der Radius  der kleinsten Normkugel,
die die Menge
der kleinsten Normkugel,
die die Menge  umfasst.
umfasst.
Beispiel
Gesucht ist die von der euklidischen
Vektornorm  induzierte Matrixnorm der (2 × 2)-Matrix
induzierte Matrixnorm der (2 × 2)-Matrix
 .
.
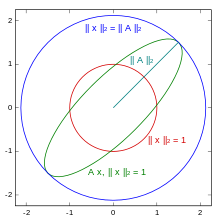
Diese Matrix beschreibt als lineare
Abbildung eine gleichzeitige Streckung
in x-Richtung, Stauchung
in y-Richtung und Drehung
um 45°. In nebenstehendem Bild entspricht der rote Kreis dem Einheitskreis in der
euklidischen Norm, also der Menge der Vektoren mit Länge Eins. Die
grüne Ellipse ist dann der Einheitskreis nach
Transformation (Drehstreckung) durch die
Matrix  .
Die natürliche Matrixnorm von
entspricht dann der Länge desjenigen Vektors auf der grünen Ellipse, dessen
Länge maximal ist. Im Beispiel sind dies die beiden Vektoren
.
Die natürliche Matrixnorm von
entspricht dann der Länge desjenigen Vektors auf der grünen Ellipse, dessen
Länge maximal ist. Im Beispiel sind dies die beiden Vektoren
 und
und  .
.
Die natürliche Matrixnorm von
bezüglich der euklidischen Norm ist dann die Länge eines dieser Vektoren und
somit
 .
.
Der blaue Kreis ist der Kreis mit dem kleinsten Radius, der die grüne Menge umfasst; sein Radius entspricht gerade der natürlichen Matrixnorm.
Eigenschaften
Im Weiteren wird der Zusatz  bei der Vektornorm weggelassen, da durch das Argument der Norm implizit klar
ist, ob es sich um eine Matrix- oder um eine Vektornorm handelt.
bei der Vektornorm weggelassen, da durch das Argument der Norm implizit klar
ist, ob es sich um eine Matrix- oder um eine Vektornorm handelt.
Normaxiome
Jede natürliche Matrixnorm erfüllt die drei Normaxiome.
Die Definitheit folgt für
aus
 .
.
Die absolute
Homogenität folgt für
und  aus der Homogenität der Vektornorm durch
aus der Homogenität der Vektornorm durch
 .
.
Die Subadditivität
folgt  ebenfalls aus der Subadditivität der Vektornorm durch
ebenfalls aus der Subadditivität der Vektornorm durch
 ,
,
wobei hier zudem das Maximum der Summe durch die Summe der Maxima nach oben abgeschätzt wurde.
Verträglichkeit
Jede natürliche Matrixnorm ist mit der Vektornorm, aus der sie abgeleitet
wurde, verträglich,
das heißt für
und
gilt
 ,
,
was direkt aus der Definition von  als minimale Zahl
mit
als minimale Zahl
mit

folgt. Damit ist die natürliche Matrixnorm sogar die kleinste Matrixnorm, die mit der zugrunde liegenden Vektornorm verträglich ist. Sie wird daher Grenzennorm oder auch lub-Norm (nach engl. lowest upper bound) genannt. Weiterhin folgt aus der Verträglichkeit, dass jede natürliche Matrixnorm einer quadratischen Matrix mindestens so groß wie ihr Spektralradius ist.
Submultiplikativität
Jede natürliche Matrixnorm ist zudem submultiplikativ,
das heißt für
und  gilt
gilt
 ,
,
was direkt aus der Verträglichkeit folgt:
 .
.
Spezialfälle
Einheitsmatrix
Für die Einheitsmatrix
 ergibt jede natürliche Matrixnorm den Wert Eins, denn es gilt
ergibt jede natürliche Matrixnorm den Wert Eins, denn es gilt
 .
.
Inverse
Ist eine quadratische Matrix  regulär,
dann gilt für die natürliche Matrixnorm ihrer Inversen
regulär,
dann gilt für die natürliche Matrixnorm ihrer Inversen
 ,
,
wobei sich die letzte Gleichung durch die Substitution  ergibt. Die natürliche Matrixnorm der Inversen ist damit der Kehrwert des kleinsten
Streckungsfaktors, der durch die Anwendung der Matrix auf einen Einheitsvektor
entsteht. Damit lässt sich die Kondition
einer regulären Matrix
ergibt. Die natürliche Matrixnorm der Inversen ist damit der Kehrwert des kleinsten
Streckungsfaktors, der durch die Anwendung der Matrix auf einen Einheitsvektor
entsteht. Damit lässt sich die Kondition
einer regulären Matrix

bezüglich einer natürlichen Matrixnorm als das Verhältnis aus größtem und kleinstem Streckungsfaktor, den die Matrix generiert, ansehen.
Beispiele natürlicher Matrixnormen
Die wichtigsten natürlichen Matrixnormen sind von den p-Normen induziert. Drei dieser natürlichen Matrixnormen haben eigene Namen und besondere Bedeutung.
- Die Spaltensummennorm ist die durch die Summennorm induzierte Norm:
-
 .
.
- Sie entspricht der maximalen Betragssumme aller Spalten der Matrix.
- Die Spektralnorm ist die durch die euklidische Norm induzierte Norm:
-
 .
.
- Sie entspricht der Quadratwurzel des größten Eigenwerts von
 ,
wobei
,
wobei  die adjungierte
Matrix (im reellen Fall transponierte
Matrix) zu
ist.
die adjungierte
Matrix (im reellen Fall transponierte
Matrix) zu
ist.
- Die Zeilensummennorm ist die durch die Maximumsnorm induzierte Norm:
-
 .
.
- Sie entspricht der maximalen Betragssumme aller Zeilen der Matrix.
Verallgemeinerung
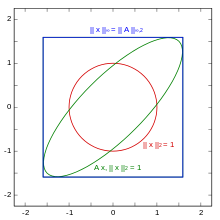
 in zwei Dimensionen
in zwei DimensionenAllgemeiner kann eine natürliche Matrixnorm  auch über zwei verschiedene Vektornormen abgeleitet werden, wobei die eine Norm
auch über zwei verschiedene Vektornormen abgeleitet werden, wobei die eine Norm
 die Größe eines Vektors im Ausgangsraum misst und die andere Norm
die Größe eines Vektors im Ausgangsraum misst und die andere Norm  die Größe eines Vektors im Zielraum. Damit ist die von diesen beiden Normen
induzierte Matrixnorm definiert als
die Größe eines Vektors im Zielraum. Damit ist die von diesen beiden Normen
induzierte Matrixnorm definiert als
 .
.
Sie ist aufgrund ihrer Definition als Minimum mit den beiden Vektornormen verträglich im Sinne von

und für
submultiplikativ mit  als dritter Vektornorm im Sinne von
als dritter Vektornorm im Sinne von
 ,
,
da aufgrund der Verträglichkeit analog zu oben

gilt. Meist wird aber in der Praxis statt unterschiedlicher Vektornormen die gleiche Norm im jeweiligen Vektorraum verwendet.


© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 08.12. 2020