Dreipunkteform
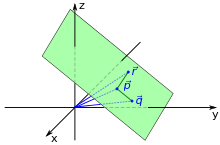
Die Dreipunkteform oder Drei-Punkte-Form ist in der Mathematik eine spezielle Form einer Ebenengleichung. In der Dreipunkteform wird eine Ebene im euklidischen Raum mit Hilfe dreier Punkte der Ebene dargestellt. Der Ortsvektor eines der drei Punkte dient dabei als Stützvektor der Ebene, während die Differenzvektoren zu den Ortsvektoren der anderen beiden Punkte die Richtungsvektoren der Ebene bilden. Jeder Punkt der Ebene wird dann in Abhängigkeit von zwei Parametern beschrieben. Bei der Dreipunkteform handelt es sich also um eine spezielle Parameterdarstellung der Ebene.
Die der Dreipunkteform entsprechende Form einer Geradengleichung wird Zweipunkteform genannt.
Darstellung
In der Dreipunkteform wird eine Ebene im dreidimensionalen Raum durch die
Ortsvektoren  ,
,
 und
und  dreier Punkte der Ebene beschrieben. Eine Ebene besteht dann aus denjenigen
Punkten im Raum, deren Ortsvektoren
dreier Punkte der Ebene beschrieben. Eine Ebene besteht dann aus denjenigen
Punkten im Raum, deren Ortsvektoren  die Gleichung
die Gleichung
 für
für 
erfüllen. Die drei Punkte dürfen dabei nicht kollinear
sein, das heißt nicht alle auf einer Geraden
liegen. Dies ist genau dann der Fall, wenn das Kreuzprodukt
 ist. Der Vektor
dient dabei als Stützvektor der Ebene, während die Differenzvektoren
ist. Der Vektor
dient dabei als Stützvektor der Ebene, während die Differenzvektoren  und
und  die Richtungsvektoren der Ebene bilden.
die Richtungsvektoren der Ebene bilden.
In der Dreipunkteform werden die Punkte der Ebene in Abhängigkeit von den
beiden Parametern  und
und  dargestellt. Jedem Wertepaar dieser Parameter entspricht genau ein Punkt der
Ebene. Die beiden Richtungsvektoren spannen dabei ein affines Koordinatensystem
auf, wobei
dargestellt. Jedem Wertepaar dieser Parameter entspricht genau ein Punkt der
Ebene. Die beiden Richtungsvektoren spannen dabei ein affines Koordinatensystem
auf, wobei  die affinen
Koordinaten eines Punkts der Ebene sind.
die affinen
Koordinaten eines Punkts der Ebene sind.
Beispiel
Ausgeschrieben lautet die Dreipunkteform einer Ebenengleichung

mit .
Sind beispielsweise die drei Ortsvektoren  ,
,
 und
und  ,
so erhält man als Ebenengleichung
,
so erhält man als Ebenengleichung
 .
.
Jede Wahl von ,
beispielsweise  oder
oder  ,
ergibt dann einen Ebenenpunkt.
,
ergibt dann einen Ebenenpunkt.
Berechnung
Aus der Parameterform
einer Ebenengleichung mit Stützvektor
und den beiden Richtungsvektoren  und
und  lassen sich neben dem Stützvektor zwei weitere Ortsvektoren von Punkten der
Ebene einfach durch Wahl von
lassen sich neben dem Stützvektor zwei weitere Ortsvektoren von Punkten der
Ebene einfach durch Wahl von
 und
und 
finden. Aus den weiteren Formen von Ebenengleichungen, der Koordinatenform, der Achsenabschnittsform, der Normalenform und der hesseschen Normalform, wird zunächst die zugehörige Parameterform der Ebene ermittelt (siehe Berechnung der Parameterform) und daraus dann die Dreipunkteform.
Weitere Darstellungen
Homogene Darstellung
Eine verwandte Darstellung einer Ebene mit Hilfe dreier Ebenenpunkte verwendet baryzentrische Koordinaten. Eine Ebene wird dann durch die Gleichung
 für
für  mit
mit 
beschrieben. Hierbei sind  die normierten baryzentrischen Koordinaten eines Ebenenpunkts. Sind alle drei
Koordinaten positiv, so liegt der Ebenenpunkt innerhalb des Dreiecks, das durch die drei
vorgegebenen Punkte beschrieben wird. Sind ein oder zwei Koordinaten negativ, so
liegt der Ebenenpunkt außerhalb dieses Dreiecks. Bei den baryzentrischen
Koordinaten handelt es sich um spezielle homogene
affine Koordinaten, während in der Dreipunkteform inhomogene affine Koordinaten
verwendet werden. Die Gleichwertigkeit beider Darstellungen ergibt sich
unmittelbar aus der Gleichung
die normierten baryzentrischen Koordinaten eines Ebenenpunkts. Sind alle drei
Koordinaten positiv, so liegt der Ebenenpunkt innerhalb des Dreiecks, das durch die drei
vorgegebenen Punkte beschrieben wird. Sind ein oder zwei Koordinaten negativ, so
liegt der Ebenenpunkt außerhalb dieses Dreiecks. Bei den baryzentrischen
Koordinaten handelt es sich um spezielle homogene
affine Koordinaten, während in der Dreipunkteform inhomogene affine Koordinaten
verwendet werden. Die Gleichwertigkeit beider Darstellungen ergibt sich
unmittelbar aus der Gleichung

und der Beobachtung, dass  gilt.
gilt.
Darstellung als Determinante
Eine Ebene, die durch drei vorgegebene Punkte verläuft, kann mit Hilfe der Determinante einer Matrix auch über die Gleichung

oder äquivalent dazu durch

definiert werden. Eine solche Darstellung wird auch als Determinantenform einer Ebenengleichung bezeichnet. Aus den Eigenschaften des Spatprodukts folgt über

die Äquivalenz zur Normalenform einer Ebenengleichung.
Verallgemeinerung
Allgemein lassen sich durch die Dreipunkteform nicht nur Ebenen im
dreidimensionalen Raum, sondern auch in höherdimensionalen Räumen beschreiben.
Im  -dimensionalen
euklidischen Raum besteht eine Ebene entsprechend aus denjenigen Punkten, deren
Ortsvektoren
die Gleichung
-dimensionalen
euklidischen Raum besteht eine Ebene entsprechend aus denjenigen Punkten, deren
Ortsvektoren
die Gleichung
-
für
erfüllen. Es wird dabei lediglich mit -komponentigen
statt dreikomponentigen Vektoren gerechnet. Auch die Darstellung mit
baryzentrischen Koordinaten bleibt in höherdimensionalen Räumen in analoger Form
erhalten.
Literatur
- Lothar Papula: Mathematik für Ingenieure und Naturwissenschaftler 1. Springer, 2007, ISBN 978-3-8348-0224-8.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 16.01. 2022