Zariski-Tangentialraum
Der Zariski-Tangentialraum ist ein Konzept aus der algebraischen Geometrie, welches die aus der elementaren Geometrie und der Differentialgeometrie bekannten Begriffe von Tangenten, Tangentialebenen und Tangentialräumen in die Sprache der algebraischen Geometrie übersetzt.
Um einem Punkt einer Varietät einen affinen Unterraum des umgebenen Raumes zuzuordnen, werden die analytischen Methoden der Differentialgeometrie in eine algebraische Sprache übersetzt. In der Sprache der modernen algebraischen Geometrie wird der Tangentialraum eines Schemas intrinsisch, also ohne Bezugnahme auf einen umgebenen Raum definiert.
Motivation
Analogie zur Differentialgeometrie
Klassisch wird der Tangentialraum an einem Punkt als Menge der Tangentialvektoren definiert. Diese wiederum entsprechen eindeutig den Richtungsableitungen in diesem Punkt. Richtungsableitungen sind genau die Derivationen (siehe den Abschnitt weiter unten) der glatten Funktionen, weshalb man den Tangentialraum auch als Menge der Derivationen in einem Punkt definieren kann.
Weil Derivationen linear sind und die Derivation einer konstanten Funktion
Null ergibt, ist eine Derivation schon durch ihre Anwendungen auf die Elemente
des Maximalideals  eindeutig bestimmt. Weiterhin folgt aus der Leibniz-Regel, dass jede Derivation
auf
eindeutig bestimmt. Weiterhin folgt aus der Leibniz-Regel, dass jede Derivation
auf  verschwindet. Man kann also Derivationen als lineare Abbildungen
verschwindet. Man kann also Derivationen als lineare Abbildungen  auffassen. Das motiviert die nachfolgende Definition.
auffassen. Das motiviert die nachfolgende Definition.
(Während diese Definition sich auch auf den Tangentialraum von Mannigfaltigkeiten übertragen lässt, hat sie dort aber kaum Anwendungen. Innerhalb der algebraischen Geometrie ermöglicht die algebraische Definition die Verwendung der Idealtheorie auch bei der Untersuchung von Tangentialräumen, sowie auch die Verallgemeinerung des Begriffs in den Kontext der Schemata.)
Tangentialraum einer affinen Hyperfläche
Sei im Folgenden  ein algebraisch abgeschlossener Körper,
ein algebraisch abgeschlossener Körper,  der affine
der affine  -dimensionale
Raum und
-dimensionale
Raum und ![{\displaystyle f\in k[X_{1},\dots ,X_{n}]}](/svg/d051e21452ce2ca715a000628c15e04930a5c4d9.svg) ein irreduzibles Polynom.
ein irreduzibles Polynom.  sei die durch
sei die durch  definierte Hyperfläche
definierte Hyperfläche

Ist  ein Punkt der Hyperfläche, so ist eine Gerade eine Tangente an
im Punkt ,
wenn sie eine mehrfache Schnittpunkt mit
im Punkt
hat. Algebraisch ausgedrückt bedeutet das:
ein Punkt der Hyperfläche, so ist eine Gerade eine Tangente an
im Punkt ,
wenn sie eine mehrfache Schnittpunkt mit
im Punkt
hat. Algebraisch ausgedrückt bedeutet das:
Ohne
Beschränkung der Allgemeinheit sei
der Nullpunkt. (Nach einem Koordinatenwechsel kann man dies stets erreichen.)
Ist  ein beliebiger Punkt, so hat die Gerade
ein beliebiger Punkt, so hat die Gerade

die durch den Nullpunkt und  geht, genau in den Nullstellen des Polynoms
geht, genau in den Nullstellen des Polynoms ![{\displaystyle p\in k[t]}](/svg/95110c73994647e09697062f07e0d76f400dce65.svg) :
:

Schnittpunkte mit .
Das Polynom  ist von der Form
ist von der Form

Da Null ein Schnittpunkt ist, ist  .
Ist nun auch
.
Ist nun auch  ,
so hat die Gerade einen mehrfachen Schnittpunkt mit
im Nullpunkt und ist eine Tangente an .
Die Vereinigung aller Tangenten ist ein affiner Unterraum und wird als der
Tangentialraum von
bezeichnet.
,
so hat die Gerade einen mehrfachen Schnittpunkt mit
im Nullpunkt und ist eine Tangente an .
Die Vereinigung aller Tangenten ist ein affiner Unterraum und wird als der
Tangentialraum von
bezeichnet.
Definition
Sei  eine algebraische
Varietät (über einem Körper
)
mit Koordinatenring
eine algebraische
Varietät (über einem Körper
)
mit Koordinatenring
![k\left[V\right]](/svg/27cea7ca7898df08df718e02b118972673b94d3e.svg) ,
und sei
,
und sei  ein Punkt mit zugehörigem Maximalideal
ein Punkt mit zugehörigem Maximalideal
![{\mathfrak m}_x=\left\{f\in k\left[V\right]\colon f(x)=0\right\}](/svg/657c49abe1ce2e42bf5bfa0fc20e4febfbf1a730.svg) .
.
Dann ist der Kotangentialraum  definiert als
definiert als

und der Zariski-Tangentialraum  als dessen Dualraum
als dessen Dualraum
 .
.
Allgemeiner kann man für einen lokalen
Ring  mit Maximalideal
mit Maximalideal  den Kotangentialraum als
den Kotangentialraum als  definieren, und analog den Zariski-Tangentialraum als dessen Dualraum
definieren, und analog den Zariski-Tangentialraum als dessen Dualraum  .
Der Zariski-Tangentialraum einer algebraischen Varietät im Punkt
.
Der Zariski-Tangentialraum einer algebraischen Varietät im Punkt  ist dann der Zariski-Tangentialraum des lokalen
Ringes
ist dann der Zariski-Tangentialraum des lokalen
Ringes ![{\mathcal O}_x=k\left[V\right]_{{\mathfrak m}_x}](/svg/f6859872c15afc18cbe6db0262fcf5e04362cf47.svg) ,
also des Ringes der Keime regulärer Funktionen in .
,
also des Ringes der Keime regulärer Funktionen in .
Explizite Berechnung
Sei  eine algebraische Varietät mit definierendem Ideal
eine algebraische Varietät mit definierendem Ideal  und sei .
Für
und sei .
Für  sei
sei
 .
.
Dann ist der Zariski-Tangentialraum isomorph zu  ,
wobei
,
wobei ![I_x\subset k\left[X_1,\ldots,X_n\right]](/svg/e33aa5de761b7afe28046800421a9cc56633f26d.svg) das von den
das von den

aufgespannte Ideal ist. Also
 .
.
Sind  Erzeuger von ,
dann sind
Erzeuger von ,
dann sind  Erzeuger von
Erzeuger von  .
.
Beispiele
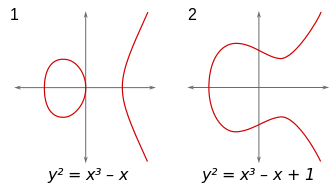
 definierten Kurven y2 = x3 − x und
y2 = x3 − x + 1
definierten Kurven y2 = x3 − x und
y2 = x3 − x + 1 :
:
- Die Tangente in
 an
ist die y-Achse, also
an
ist die y-Achse, also  .
Der Tangentialraum in
.
Der Tangentialraum in  ist derselbe, d.h. der Tangentialraum ist nicht als affiner Raum,
sondern als Vektorraum zu verstehen. Allgemein ist die Tangente im Punkt
ist derselbe, d.h. der Tangentialraum ist nicht als affiner Raum,
sondern als Vektorraum zu verstehen. Allgemein ist die Tangente im Punkt  der Kern der linearen Abbildung
der Kern der linearen Abbildung  ,
also der vom Vektor
,
also der vom Vektor  aufgespannte 1-dimensionale Unterraum des
aufgespannte 1-dimensionale Unterraum des  .
.
 :
:
- Auch hier ist die Tangente im Punkt
der Kern der linearen Abbildung ,
also der vom Vektor
aufgespannte 1-dimensionale Unterraum des .
 (Newtonscher
Knoten):
(Newtonscher
Knoten):
- Hier kann man in
zwei Tangenten anlegen,
 und
und  .
Der Tangentialraum ist der davon aufgespannte .
Die Dimension des Tangentialraumes ist in diesem Punkt größer als die
Dimension der Varietät, es handelt sich um eine Singularität (siehe
unten).
.
Der Tangentialraum ist der davon aufgespannte .
Die Dimension des Tangentialraumes ist in diesem Punkt größer als die
Dimension der Varietät, es handelt sich um eine Singularität (siehe
unten).
 (
(- Ebenso wie im vorigen Beispiel ist hier
 ,
also
,
also  .
.
 :
:
- Man berechnet
 .
Insbesondere ist
.
Insbesondere ist  eine Singularität. Es gibt auf dieser Fläche keine weiteren Singularitäten.
Beispielsweise ist
eine Singularität. Es gibt auf dieser Fläche keine weiteren Singularitäten.
Beispielsweise ist  .
.
Derivationen
Äquivalent kann man den Tangentialraum auch mit Hilfe von Derivationen definieren. (Dies entspricht der Interpretation von Vektorfeldern als Richtungsableitungen.)
Sei
eine algebraische Varietät und  der Ring ihrer regulären Funktionen. Eine Derivation von
in einem Punkt
ist eine -lineare
Abbildung
der Ring ihrer regulären Funktionen. Eine Derivation von
in einem Punkt
ist eine -lineare
Abbildung  mit
mit

für alle  .
.
Der -Vektorraum der Derivationen
in
ist isomorph zum Zariski-Tangentialraum .
Dimension und Singularitäten
Für einen noetherschen
lokalen Ring
mit Maximalideal
gilt stets
 ,
,
wobei  die Krull-Dimension
von
bezeichnet.
die Krull-Dimension
von
bezeichnet.
Insbesondere gilt für alle Punkte
einer algebraischen Varietät :
 .
.
Punkte ,
in denen  ist, werden als Singularität
bezeichnet. Punkte, in denen
ist, werden als Singularität
bezeichnet. Punkte, in denen  ist, heißen reguläre Punkte oder glatte Punkte.
ist, heißen reguläre Punkte oder glatte Punkte.
Die glatten Punkte bilden eine offene
und dichte
Teilmenge der Varietät ..
Eine glatte Varietät ist eine algebraische Varietät, in der alle Punkte glatt sind, es also keine Singularitäten gibt.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.08. 2022