Kürzester Pfad
Ein kürzester Pfad ist in der Graphentheorie ein Pfad zwischen zwei unterschiedlichen
Knoten
 eines Graphen,
welcher minimale Länge bezüglich einer Kantengewichtsfunktion
eines Graphen,
welcher minimale Länge bezüglich einer Kantengewichtsfunktion
 hat.
Haben die Kanten im Graphen alle das Gewicht 1, ist also
hat.
Haben die Kanten im Graphen alle das Gewicht 1, ist also
 für alle Kanten
für alle Kanten
 , so ist der kürzeste Pfad ein
, so ist der kürzeste Pfad ein
 –
– -Pfad mit der geringstmöglichen Anzahl von Kanten zwischen
und
.
-Pfad mit der geringstmöglichen Anzahl von Kanten zwischen
und
.
Die Aufgabe für einen gegebenen Graph einen kürzesten Pfad zu berechnen, ist ein Optimierungsproblem und wird in der Literatur oft als Shortest Path Problem bezeichnet[1].
Komplexität
Die Komplexität hängt maßgeblich von der Art der Gewichtsfunktion ab und davon, ob Pfade oder Kantenzüge betrachtet werden. In Kantenzüge können sich Knoten und Kanten wiederholen, während Pfade keinen Knoten doppelt verwenden. Man unterscheidet drei Arten von Gewichtsfunktionen:
- Gewichtsfunktionen ohne negative Gewichte;
- Konservative Gewichtsfunktion: Eine Gewichtsfunktion heißt konservativ für den Graphen
 , wenn
, wenn
 für alle
Zyklen
für alle
Zyklen
 von
;
von
; - Gewichtsfunktionen mit beliebigen Gewichten.
Die genaue Problemformulierung ist entscheidend um die Komplexitätsfrage beantworten zu können.
- Ohne negative Gewichte
- Mit Dijkstras Algorithmus kann man das Problem in einer Laufzeit von
 lösen, wobei
lösen, wobei
 die Anzahl der Kanten und
die Anzahl der Kanten und
 die Anzahl der Knoten im Graphen bezeichnen. Man beachte, dass die
kürzesten Pfade auch kürzeste Kantenzüge sind. Sind alle Gewichte echt positiv, stimmen die kürzesten Pfade mit den kürzesten Kantenzügen überein.
die Anzahl der Knoten im Graphen bezeichnen. Man beachte, dass die
kürzesten Pfade auch kürzeste Kantenzüge sind. Sind alle Gewichte echt positiv, stimmen die kürzesten Pfade mit den kürzesten Kantenzügen überein. - Mit beliebigen Gewichten und mit Kantenzügen
- Falls der Graph einen Zyklus enthält, bei dem die Summe über die Gewichte strikt negativ ist, dann gibt es Knoten
 , die keinen kürzesten Kantenzug haben. Wenn es einen Kantenzug von
zu diesem Zykel gibt und einen Kantenzug von diesem Zykel zu
, dann kann man einen beliebig kurzen Kantenzug von
nach
erzeugen, indem der Zyklus nur hinreichend oft durchlaufen wird.
Der Algorithmus von Bellman-Ford kann in einer Laufzeit von
, die keinen kürzesten Kantenzug haben. Wenn es einen Kantenzug von
zu diesem Zykel gibt und einen Kantenzug von diesem Zykel zu
, dann kann man einen beliebig kurzen Kantenzug von
nach
erzeugen, indem der Zyklus nur hinreichend oft durchlaufen wird.
Der Algorithmus von Bellman-Ford kann in einer Laufzeit von
 einen kürzesten Kantenzug finden (falls es ihn gibt) oder beweisen,
dass es keinen gibt, indem ein negativer Zyklus gefunden wird. Das Entscheidungsproblem, ob es einen Pfad der Länge
einen kürzesten Kantenzug finden (falls es ihn gibt) oder beweisen,
dass es keinen gibt, indem ein negativer Zyklus gefunden wird. Das Entscheidungsproblem, ob es einen Pfad der Länge
 gibt, lässt sich damit in
Polynomialzeit lösen.
gibt, lässt sich damit in
Polynomialzeit lösen. - Mit beliebigen Gewichten und mit Pfaden
- Diese Variante des Problems ist NP-schwer. Dies kann zum Beispiel durch eine Reduktion vom NP-schweren Hamiltonpfadproblem bewiesen werden, indem beim Kürzester-Pfad-Problem alle Gewichte auf −1 gesetzt werden. Man beachtet, dass diese Konstruktion negative Zyklen enthält, und deswegen gilt die NP-Schwere nicht für konservative Gewichtsfunktionen.
- Konservative Gewichtsfunktion und mit Pfaden
- Der Algorithmus von Bellman-Ford kann in einer Laufzeit von
einen kürzesten Pfad finden.
Die Literatur beschränkt sich meistens auf nichtnegative Gewichte oder konservative Gewichtsfunktion. Mit einer dieser Zusatzforderungen ist jeder kürzeste Pfad automatisch ein kürzester Kantenzug und deswegen wird in der Literatur diese Unterscheidung oft nicht gemacht.
Im Gegensatz zum Problem des kürzesten Pfades, ist das Problem des längsten Pfades sogar für ungewichtete Graphen NP-schwer.
Variationen des Problems
Abgesehen von der Bestimmung eines kürzesten
–-Pfades gibt es noch einige weitere,
jedoch sehr ähnliche Probleme:
Single-source shortest path (SSSP)
Diese Variante befasst sich mit dem Problem, wie man die kürzesten Wege zwischen einem gegebenen Startknoten und allen übrigen Knoten eines Graphen berechnet. Für nichtnegative Gewichtsfunktionen lassen sich der Dijkstra-Algorithmus bzw. der A*-Algorithmus anpassen, um die kürzesten Wege zu allen Knoten des Graphs zu berechnen. Für beliebige konservative Gewichtsfunktionen berechnet der Bellman-Ford-Algorithmus andererseits stets auch die kürzesten Pfade zu allen anderen Knoten.
Single-destination shortest path (SDSP)
Ziel ist hier die Bestimmung eines kürzesten Pfades zwischen einem Endknoten und allen anderen Knoten des Graphen. Dieses Problem kann durch eine Umkehrung der Kantenrichtungen als SSSP beschrieben werden.
All-pairs shortest path (APSP)
In dieser Variante geht es um die Bestimmung der kürzesten Pfade zwischen allen Knotenpaaren eines Graphen. Abhängig von der Gewichtsfunktion ist es effizienter, für jeden Knoten nacheinander das SSSP lösen oder jedoch spezialisierte Verfahren wie etwa den Floyd-Warshall-Algorithmus oder den Min-Plus-Matrixmultiplikations-Algorithmus zu verwenden, die gleichzeitig für alle Paare kürzeste Pfade bestimmen.
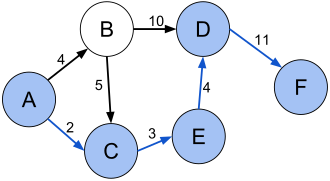
Beispiel
Im abgebildeten gegebenen Graphen ist ein kürzester Pfad zwischen den Knoten
 und
der Pfad, welcher in
startet, und über
und
der Pfad, welcher in
startet, und über
 nach
geht. Die Pfadkosten betragen hierbei
nach
geht. Die Pfadkosten betragen hierbei
 .
Will man jedoch einen Pfad von nach
.
Will man jedoch einen Pfad von nach
 finden, so ist der direkte Weg mit Kosten von
finden, so ist der direkte Weg mit Kosten von
 nicht der kürzestmögliche Pfad, da der Weg von
über
nicht der kürzestmögliche Pfad, da der Weg von
über
 nach
nur Kosten von
nach
nur Kosten von
 hat.
hat.
Formulierung als lineares Programm
Zur Bestimmung eines kürzesten Pfades lässt sich außerdem ein lineares Programm heranziehen. Man interpretiert in diesem Fall den Pfad als Fluss mit einem Flusswert von 1 auf den Kanten des Graphen. Die Bestimmung des kürzesten Pfades ist dann ein Spezialfall des Min-cost-flow-Problems. Die e ntsprechende Formulierung lautet:

Falls ein –-Pfad im gegebenen Graphen existiert,
so hat das Programm eine zulässige Lösung. Das Programm ist allerdings unbeschränkt, wenn die Gewichtsfunktion nicht konservativ ist. In diesem
Fall kann der Fluss nämlich entlang eines Zykels mit negativen Kosten beliebig weit erhöht werden.
Andernfalls hat das Problem eine Optimallösung
 , welche einem
, welche einem
 -Vektor mit
-Vektor mit
 Einträgen entspricht.
Die Menge
Einträgen entspricht.
Die Menge  beschreibt dann einen kürzesten
–-Pfad, der Zielfunktionswert
des Programms entspricht der Länge des Pfades.
beschreibt dann einen kürzesten
–-Pfad, der Zielfunktionswert
des Programms entspricht der Länge des Pfades.
Knotenpotentiale
Es stellt sich heraus, dass die Dualisierung des obigen linearen Programms eine anschauliche Interpretation hat. Das duale Programm ist gegeben durch

Eine Lösung  des dualen Programms nennt man ein Knotenpotential.
Man sieht leicht, dass für jede Lösung
des dualen Programms nennt man ein Knotenpotential.
Man sieht leicht, dass für jede Lösung
 der Vektor
der Vektor
 ebenfalls eine Lösung ist, wobei man
ebenfalls eine Lösung ist, wobei man
 beliebig wählen kann.
Man setzt in der Regel den Wert von
beliebig wählen kann.
Man setzt in der Regel den Wert von  so,
dass
so,
dass  .
Die Zielfunktion ist dann gegeben durch
.
Die Zielfunktion ist dann gegeben durch  .
.
Ist  ein beliebiger Pfad zwischen
und einem Knoten
ein beliebiger Pfad zwischen
und einem Knoten
 , so lässt sich die Länge des Pfades wie folgt abschätzen:
, so lässt sich die Länge des Pfades wie folgt abschätzen:

Das Potential eines jeden Knotens ist also eine untere Schranke für die Länge eines Pfades. Eine Optimallösung des dualen Programms findet man, wenn man das Potential eines Knotens
als die Länge des kürzesten – -Pfades bezüglich der Zielfunktion
-Pfades bezüglich der Zielfunktion
 setzt.
setzt.
Anwendungen
Algorithmen, die einen kürzesten Pfad berechnen, finden häufig Anwendung in der Berechnung von Reiserouten. So kann zum Beispiel die Entfernung zwischen zwei Städten berechnet werden. Dabei sind die Städte die Knoten des Graphen und die Straßen die Kanten. Verschiedene Algorithmen sind in der freien Python-Bibliothek NetworkX implementiert.[2]
Kürzeste Wege mit Nebenbedingungen
Eine Verallgemeinerung des Problems erhält man, wenn man nur –-Pfade
betrachtet, die der zusätzlichen Ungleichung
 gehorchen. Dabei ist
gehorchen. Dabei ist
 eine weitere Gewichtsfunktion und
eine weitere Gewichtsfunktion und
 eine reelle Zahl.
eine reelle Zahl.
Das resultierende Constrained Shortest Path Problem ist dann auch für konservative bzw. nichtnegative Zielfunktionen NP-schwer, siehe H. C. Joksch (1966).[3]
Literatur
- Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, Clifford Stein: Introduction to Algorithms. 2. Auflage. MIT Press, Cambridge MA 2001, ISBN 0-262-03293-7 (englisch).
- Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, Clifford Stein: Algorithmen – Eine Einführung. 2. Auflage. 2007. ISBN 978-3-486-58262-8
- H. C. Joksch (1966). The shortest route problem with constraints. J. Math. Anal. Appl. 14, Seite 191–197
Einzelnachweise
- ↑ Bernhard Korte, Jens Vygen: Combinatorial Optimization. Theory and Algorithms. 4th edition. Springer, Berlin u. a. 2008, ISBN 978-3-540-71844-4 (Algorithms and Combinatorics 21)
- ↑
 Algorithms -
Shortest Paths. In: NetworkX 2.2 documentation. Abgerufen am 29. Dezember 2025 (englisch).
Algorithms -
Shortest Paths. In: NetworkX 2.2 documentation. Abgerufen am 29. Dezember 2025 (englisch).
- ↑ H. C. Joksch (1966)


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 04.01. 2026