Zustandsgröße (Systemtheorie)
Die Zustandsvariablen oder alternativ Zustandsvariable der
Zustandsraumdarstellung
beschreiben physikalisch den Energiegehalt der in einem technischen dynamischen
System enthaltenen Speicherelemente. Sie bedeuten z.B. Spannung an einem
Kondensator, Strom in einer Induktivität, bei einem Feder-Masse-Dämpfungssystem
die potentiellen
und kinetischen
Energieanteile. Die Anzahl der Zustandsvariablen  des Zustandsvektors
des Zustandsvektors  ist die Dimension des Zustandsraumes. Technische Anwendung: Regelungstechnik.
ist die Dimension des Zustandsraumes. Technische Anwendung: Regelungstechnik.
Zustandsgrößen der Zustandsraumdarstellung
Die Theorie des Zustandsraumes stammt aus den USA der 1960er Jahre von dem Mathematiker und Stanford-Universitätslehrer Rudolf E. Kalman.
Ein dynamisches System ist eine abgegrenzte zeitabhängige Funktionseinheit, die durch ihre Signaleingänge und Signalausgänge in einer Wechselwirkung mit der Umwelt steht. Das System kann ein mechanisches Körper, ein elektrisches Netzwerk {Netzwerk (Elektrotechnik)}, aber auch ein biologischer Vorgang oder ein Bestandteil der Volkswirtschaft sein.
Die Zustandsraumdarstellung ist eine Systembeschreibung eines meist technischen Systems mit mehreren Energiespeichern und mindestens einer Eingangsgröße und einer Ausgangsgröße. Die Eingangsgröße kann den Wert Null haben, in diesem Fall ist das System mit seinen Anfangswerten der Energiespeicher zum Zeitpunkt t = 0 für t > 0 sich selbst überlassen und strebt mit seiner Ausgangsgröße nach genügend langer Zeit den Wert Null an (Beispiel gedämpftes Federpendel). Physikalisch betrachtet ist der Zustand eines dynamischen Systems durch den Energiegehalt der im System vorhandenen Energiespeicher bestimmt. Die Zustandsgrößen beschreiben den Energiegehalt der im System enthaltenen Speicherelemente.
 in der Zustandsraumdarstellung für ein Eingrößensystem.
in der Zustandsraumdarstellung für ein Eingrößensystem.Zwei Wege führen zu einem Zustandsraummodell eines dynamischen Systems:
- durch Aufstellen des physikalischen Wirkungszusammenhanges mittels Differentialgleichungen 1. Ordnung,
- durch Umwandlung einer Differentialgleichung höherer Ordnung in ein System gekoppelter Differentialgleichungen 1. Ordnung.
Sämtliche Beziehungen der Zustandsgrößen, der Eingangsgrößen und Ausgangsgrößen einer Zustandsraummodells werden in Form von Matrizen und Vektoren dargestellt. Das Zustandsraummodell wird durch zwei Gleichungen – die Zustandsdifferentialgleichung und die Ausgangsgleichung – beschrieben.
Die Zustandsvariablen
sind bei gegebener Ausgangsgleichung der Zustandsraumdarstellung (bei n > m
ist der Durchgangsfaktor d = 0) direkt ablesbar.

Nachfolgend wird die Entstehung, Definition und Anwendung der
Zustandsvariablen ,
die in dem Zustandsvektor  zusammengefasst sind, behandelt.
zusammengefasst sind, behandelt.
Entstehung der Zustandsvariablen
Typische physikalische Größen, die als Zustandsvariablen wie Ströme, Spannungen, Winkel, Wege, Geschwindigkeiten, Beschleunigungen, Kräfte, Temperatur an Energiespeichern wie Kapazitäten, Induktivitäten, Massen und Federn auftreten, geben das zeitliche Verhalten an den Speicherelementen in Abhängigkeit von den Eingangssignalen oder Anfangswerten wieder.
Ein lineares dynamisches System wird durch eine gewöhnliche Differentialgleichung mit konstanten Koeffizienten beschrieben.

Der höchste Grad der Ableitung von  gibt die Anzahl der Speicherelemente des Systems wieder. Diese
Differentialgleichung kann mit Hilfe der Laplace-Transformation als Übertragungsfunktion
definiert werden:
gibt die Anzahl der Speicherelemente des Systems wieder. Diese
Differentialgleichung kann mit Hilfe der Laplace-Transformation als Übertragungsfunktion
definiert werden:
Übertragungsfunktion der Polynomdarstellung und der Zerlegung in die Pol-Nullstellen-Darstellung mit reellen Linearfaktoren:

Dabei bedeuten m = Anzahl der Nullstellen
 ,
n = Anzahl der Pole
,
n = Anzahl der Pole
 ,
s = Laplace-Variable.
,
s = Laplace-Variable.
Zustandsvariablen entstehen aus den Polen des Übertragungssystems:
Die Zustandsvariablen eines linearen Systems n-ter Ordnung mit n Energiespeichern entstehen immer aus den Polen der Übertragungsfunktion. Hat das Übertragungssystem auch Nullstellen - also differenzierende Anteile - so werden die Zustandsvariablen mit den Koeffizienten der Ableitungen der Eingangsgröße u(t) zu der Ausgangsgröße y(t) addiert. Die Pole einer Übertragungsfunktion bestimmen die Geschwindigkeit der Systembewegung und der Stabilität. Die Nullstellen einer Übertragungsfunktion haben nur Einfluss auf die Amplituden des Systems.
Die Zustandsvariablen eines mathematischen Modells eines dynamischen Systems, einer Regelstrecke, können aus der gewöhnlichen systembeschreibenden Differentialgleichung bestimmt werden. Grundlage der Lösung der Differentialgleichung ist der Signalflussplan mit der grafischen Darstellung der Regelungsnormalform. Dabei werden die Terme der Ableitungen der Ausgangsgröße y(t) jeweils integriert und mit den zugehörigen Koeffizienten auf den Systemeingang zurückgeführt.
Für jede Ableitung von y(t) der Differenzialgleichung wird die Bezeichnung der Zustandsgrößen x(t) wie folgt eingeführt:




In dem Zustandsvektor
sind alle Zustandsvariablen
zusammengefasst. Zu einem beliebigen Zeitpunkt t(0) sind in dem
Zustandsvektor
alle Informationen des dynamischen Übertragungssystems enthalten.
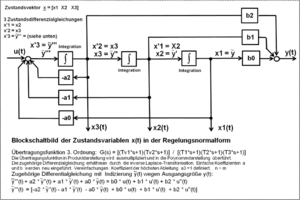
Regelungsnormalform
Bei den Zustandsbeschreibungen mit Normalformen nehmen die Zustandsgleichungen besonders einfache und zweckmäßige Formen für bestimmte Berechnungen an. Für die Normalformen wird von der Systembeschreibung des linearen Übertragungssystems durch die Differenzialgleichung oder zugehörige Übertragungsfunktion ausgegangen.
Die Signalstruktur der Regelungsnormalform stellt sich als ein analoges
zeitkontinuierliches System dar, das mit der Eingangsgröße  die Lösung der Differentialgleichung
die Lösung der Differentialgleichung  wiedergibt und gleichzeitig die Zustandsvariablen
wiedergibt und gleichzeitig die Zustandsvariablen  zeigt.
zeigt.
Das Blockschaltbild der Regelungsnormalform zeigt die Umsetzung und Lösung
der Differentialgleichung in die physikalischen analogen Signalflüsse der
Zustandsgrößen einschließlich der Ausgangsgröße bei gegebener Eingangsgröße. Die
Lösungsstruktur ergibt sich aus der Umformung der Differentialgleichung mit der
Freistellung der höchsten Ableitung  von y(t). Alle Ableitungen werden in der Reihenfolge der Ordnung durch Integratoren integriert und
mit den zugehörigen Koeffizienten wieder auf die höchste Ableitung zurückgeführt
und subtrahiert. Die Ausgänge der Integratoren bilden die Zustandsvariablen.
y(t) ist neben den Zustandsvariablen die Systemausgangsgröße.
von y(t). Alle Ableitungen werden in der Reihenfolge der Ordnung durch Integratoren integriert und
mit den zugehörigen Koeffizienten wieder auf die höchste Ableitung zurückgeführt
und subtrahiert. Die Ausgänge der Integratoren bilden die Zustandsvariablen.
y(t) ist neben den Zustandsvariablen die Systemausgangsgröße.
Man kann die Regelungsnormalform als eine Weiterentwicklung der in der Analogrechentechnik bekannten Verfahren zur Lösung einer Differentialgleichung n-ter Ordnung mit n Integratoren betrachten. Die Signalflüsse können bei Kenntnis der Koeffizienten der Zustandsvariablen direkt mittels numerischer Berechnung für beliebige Eingangssignale ermittelt und grafisch dargestellt werden.
Liegen Anfangswerte der Systemspeicher vor, können diese Werte auf die Integratoren des Signalflussplanes der Regelungsnormalform gesetzt werden.
In dem Blockschaltbild der Regelungsnormalform werden die Ableitungen von
 durch die Zustandsvariablen
durch die Zustandsvariablen  ersetzt, so dass
nicht mehr in Erscheinung tritt.
ersetzt, so dass
nicht mehr in Erscheinung tritt.
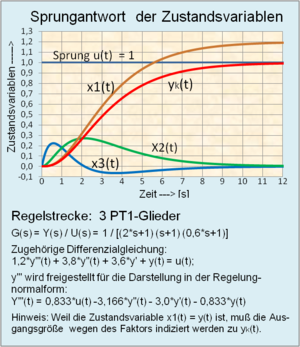
Zeitliches Verhalten der Zustandsvariablen in einer Regelstrecke
Der zeitliche Verlauf der Zustandsvariablen als Folge eines Eingangssprungs u(t) = 1 an dem Modell zeigt den Vorteil der Behandlung des Systems im Zustandsraum gegenüber einer klassischen „Ausgangsrückführung“ des Systems. Die Zustandsvariablen x(t) erscheinen zeitlich früher als die Ausgangsgröße y(t). Dieses Verhalten wird beim Zustandsregelkreis genutzt, indem die Zustandsvariablen auf eine Soll-Ist-Differenz mit der Führungsgröße w(t) zurückgeführt werden.
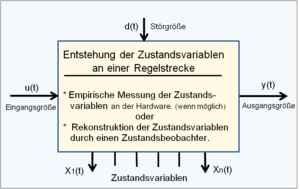
Regelstrecken bestehen allgemein aus einer bereits vorhandenen Hardware und
haben mindestens einen Systemeingang
und einen Systemausgang .
Gegebenenfalls können an mehreren Eingriffsstellen Störgrößen  in verschiedensten Signalformen angreifen. Häufig wird die Systembeschreibung im
Laplace-transformierten s-Bereich als Übertragungsfunktion
in verschiedensten Signalformen angreifen. Häufig wird die Systembeschreibung im
Laplace-transformierten s-Bereich als Übertragungsfunktion  beschrieben.
beschrieben.
Man kann die vorgegebene Hardware der Regelstrecke als Eingrößensystem auch
im Zustandsraum als Funktionsblock
beschreiben. In diesem Fall hat der Block mindestens einen Systemeingang ,
einen Systemausgang
und mehrere Ausgänge der Zustandsvariablen
und gegebenenfalls Störgrößeneingänge .
Das Systemverhalten des Funktionsblocks kann durch gewöhnliche
Differentialgleichungen oder Übertragungsfunktionen beschrieben und in die
Regelungsnormalform der Zustandsraumdarstellung überführt werden. Die
Integratoren der Regelungsnormalform können für einen betrachteten Zeitpunkt
 in der Ruhelage den Wert Null annehmen, sie können aber auch Anfangswerte
in der Ruhelage den Wert Null annehmen, sie können aber auch Anfangswerte  für mehrere Ableitungen enthalten.
für mehrere Ableitungen enthalten.
Selten ist die Differentialgleichung oder die Übertragungsfunktion der
Regelstrecke bekannt, man muss das Übertragungsverhalten identifizieren.
Die für den Regler benötigten Zustandsvariablen
müssen ermittelt werden durch:
- In der Praxis können die Zustandsvariablen an der Hardware einer Regelstrecke gemessen werden, was nicht immer möglich ist.
- Beobachter durch Rekonstruktion der Zustandsvariablen, wenn die Strecke beobachtbar ist. Die Regelstrecke muss steuerbar sein.
- Alle Zustandsvariablen müssen verfügbar sein.
- Pol- Nullstellenkompensation im Zustandsraum ist nicht erlaubt, weil Informationsverlust.
Zustandsregler
Als Entwurfsstrategie für die Bestimmung der Bewertungsfaktoren des Zustandsreglers gilt die Polzuweisung (Polvorgabe) des geschlossenen Regelkreises.
Simulationen eines Zustandsregelkreises können mit einem guten Modell der Regelstrecke an einem programmierbaren Rechner einfach durchgeführt werden. Die Beschreibung des Signalflussplanes der Regelstrecke und des Reglers im Zustandsraum kann sowohl in Form von Matrizen als auch mit Differenzengleichungen erfolgen. Je nach Höhe der Ordnung der Differentialgleichung werden alle Zustandsgrößen einem Zustandsregler zugeführt, der auf den Eingang des Zustandsraummodells der Regelstrecke wirkt. Durch die Rückführung sämtlicher Zustandsvariablen entsteht ein mehrschleifiger Regelkreis.
Es ist auch möglich, die Verstärkungsfaktoren des Zustandsreglers empirisch zu bestimmen. Die Regelstrecke in der Regelungsnormalform und der aus einer Mehrfach-Subtraktionsstelle mit dem Vorfilter V bestehende Zustandsregler können durch Simulation mittels Differenzengleichungen an einem Personal Computer nachgebildet werden.
Durch die Hintereinanderschaltung der Integratoren laut Blockschaltbild ist
nur die Zustandsvariable  eine stationäre Größe > 0, wenn die Eingangsgröße
> 0 konstant ist. Alle anderen Zustandsvariablen - eine stabile Regelstrecke
vorausgesetzt - streben gegen den Wert Null. Damit ist bei grafischer
Darstellung der Systemausgangsgröße
der Simulation der stationäre Zustand für das Einschwingverhalten für einen noch
festzulegenden Faktor
eine stationäre Größe > 0, wenn die Eingangsgröße
> 0 konstant ist. Alle anderen Zustandsvariablen - eine stabile Regelstrecke
vorausgesetzt - streben gegen den Wert Null. Damit ist bei grafischer
Darstellung der Systemausgangsgröße
der Simulation der stationäre Zustand für das Einschwingverhalten für einen noch
festzulegenden Faktor  gegeben. Die Verstärkungsfaktoren können möglichst hoch gewählt werden, z. B.
20-fach bis 100-fach, jedoch ist zu berücksichtigen, dass die Regelstrecke in
der Realität ein Hardware-System ist, dass keine beliebig hohen Stellwerte des
Reglers aufnehmen kann.
gegeben. Die Verstärkungsfaktoren können möglichst hoch gewählt werden, z. B.
20-fach bis 100-fach, jedoch ist zu berücksichtigen, dass die Regelstrecke in
der Realität ein Hardware-System ist, dass keine beliebig hohen Stellwerte des
Reglers aufnehmen kann.
Strategie der Bestimmung der Verstärkungsfaktoren bei einer Regelstrecke mit drei Zustandsgrößen:
- Die Führungsgröße
 wird auf einen normierten Sprung
wird auf einen normierten Sprung  eingestellt.
eingestellt. - Die Verstärkungsfaktoren ;
 ,
,
 und
und  des Vorfilters V werden auf z. B. auf 20 eingestellt.
des Vorfilters V werden auf z. B. auf 20 eingestellt. - Die Verstärkungsfaktoren
und
werden solange geändert, bis der gewünschte Einschwingvorgang z. B.
überschwingungsfrei erfolgt.
- Mit dem Faktor
des Vorfilters wird der stationäre Zustand von
auf das Niveau 1 eingestellt.
Der lineare Zustandsregler bewertet die einzelnen Zustandsvariablen der Regelstrecke mit Faktoren und summiert die so entstandenen Zustandsprodukte zu einem Soll-Istwert-Vergleich.

Es handelt sich bei diesem Zustandsregler nicht um einen P-Regler, wenngleich
ein solcher Eindruck laut Signalflussplan entstehen könnte. Durch die mit dem
Regler zurückgeführten Zustandsvariablen mit Bewertungsfaktoren durchlaufen noch
einmal die Rechenschaltung zur Lösung der Differenzialgleichung mit n
Integratoren und bilden neue Kreisvariablen, wodurch differenzierendes Verhalten
entsteht. Deshalb entspricht die Wirkung der zurückgeführten Zustandsgrößen je
nach Höhe der Ordnung n der Differenzialgleichung der Strecke der eines  -Reglers.
-Reglers.
Als Entwurfsstrategie für die Bestimmung der Bewertungsfaktoren des Zustandsreglers gilt die Polzuweisung (Polvorgabe) des geschlossenen Regelkreises oder auch empirisch. Durch die Hintereinanderschaltung der Integratoren ist nur die Zustandsvariable x1(t) = y(t) eine stationäre Größe > 0, wenn die Eingangsgröße u(t) konstant ist. Alle anderen Zustandsvariablen - eine stabile Regelstrecke vorausgesetzt - streben gegen den Wert Null.
Ein Vorfilter vor dem Soll-Ist-Vergleich korrigiert den statischen Fehler zwischen w(t) und y(t), weil es sich hier um eine Zustandsrückführung und nicht um eine Ausgangsrückführung handelt. Das Vorfilter kann entfallen, wenn ein zusätzlicher PI-Regler anstelle des Vorfilters eingesetzt wird, der die statische Regelabweichung minimiert.
Die Regelgüte einer Regelung mit Zustandsvariablen kann durch kein anderes Regelverfahren erreicht werden.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 19.02. 2023