Regula falsi
Das Regula-falsi-Verfahren (lateinisch regula falsi ‚Regel des Falschen‘), auch: Regula duarum falsarum Positionum (lateinisch regula duarum falsarum positionum ‚Regel vom zweifachen falschen Ansatz‘), Falsirechnung rsp. Falsi-Rechnung oder lineares Eingabeln genannt, ist eine Methode zur numerischen Berechnung von Nullstellen reeller Funktionen. Es kombiniert Methoden vom Sekantenverfahren und der Bisektion.
Das Verfahren (Primitivform)
Das Regula-falsi-Verfahren startet mit zwei Stellen (in der Nähe der
Nullstelle)  und
und  ,
deren Funktionsauswertungen
,
deren Funktionsauswertungen  ,
,
 unterschiedliche Vorzeichen
haben. In dem Intervall
unterschiedliche Vorzeichen
haben. In dem Intervall
![[a,b]](/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg) befindet sich somit nach dem Zwischenwertsatz
(für stetiges
befindet sich somit nach dem Zwischenwertsatz
(für stetiges  )
eine Nullstelle. Nun verkleinert man in mehreren Iterationsschritten
das Intervall und bekommt so eine immer genauere Näherung für die Nullstelle.
)
eine Nullstelle. Nun verkleinert man in mehreren Iterationsschritten
das Intervall und bekommt so eine immer genauere Näherung für die Nullstelle.
Iterationsvorschrift
In Schritt  berechnet man:
berechnet man:

 .
.
Ist  ,
so wird das Verfahren beendet, denn mit
,
so wird das Verfahren beendet, denn mit  ist eine Nullstelle gefunden. Anderenfalls wählt man
ist eine Nullstelle gefunden. Anderenfalls wählt man  ,
,
 wie folgt:
wie folgt:
 falls
falls  und
und  gleiches Vorzeichen haben sowie
gleiches Vorzeichen haben sowie falls
falls  und
gleiches Vorzeichen haben,
und
gleiches Vorzeichen haben,
und geht damit in den nächsten Iterationsschritt.
Bemerkungen
- Die Berechnung des
entspricht dem Anwenden des Sekantenverfahrens
mit einer Iteration im
 -ten
Intervall. Im Gegensatz zum Sekantenverfahren befindet sich in diesem
Intervall aber stets eine Nullstelle.
-ten
Intervall. Im Gegensatz zum Sekantenverfahren befindet sich in diesem
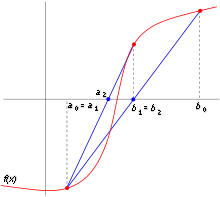
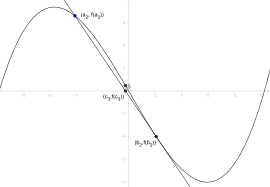
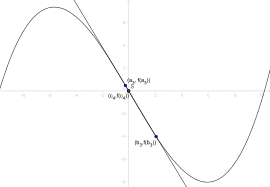
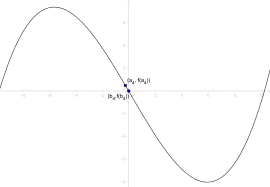
Intervall aber stets eine Nullstelle. - Geometrisch kann man
als die Nullstelle der Sekante durch
 und
und  deuten.
deuten. -
liegt natürlich immer im Intervall
![\left[a_{k-1}, b_{k-1}\right]](/svg/09ae57559c1843fd3d81a2e8dd0780ec4a040ab5.svg) .
. - Konvergenz: Solange
im -ten
Intervall nicht strikt konkav
bzw. konvex
ist, also im Intervall ein Vorzeichenwechsel
der zweiten Ableitung vorliegt, liegt superlineare
Konvergenz vor.
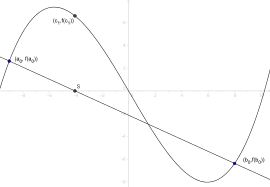
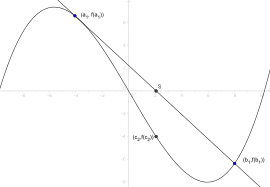
- Visualisierung der Regula falsi
-
-
-
-
-
Verbesserung des Verfahrens
Ist
konkav oder konvex im Intervall ![[a_k,b_k]](/svg/13f59f1660676e1ffeb6e604b7011896c643a81d.svg) ,
hat die zweite Ableitung also überall im Intervall das gleiche Vorzeichen, so
bleibt eine der Intervallgrenzen für alle weiteren Iterationen stehen, denn die
Sekante liegt immer unterhalb bzw. oberhalb der Funktion. Die andere
Intervallgrenze konvergiert jetzt nur noch linear gegen
die Lösung.
,
hat die zweite Ableitung also überall im Intervall das gleiche Vorzeichen, so
bleibt eine der Intervallgrenzen für alle weiteren Iterationen stehen, denn die
Sekante liegt immer unterhalb bzw. oberhalb der Funktion. Die andere
Intervallgrenze konvergiert jetzt nur noch linear gegen
die Lösung.
Abhilfe schaffen die folgenden Verfahren.
Illinois-, Pegasus- und Anderson/Björck-Verfahren
Idee der Verfahren
Den verbesserten Verfahren liegt die folgende Idee zu Grunde. Falls sich die
„linke“ Intervallgrenze  im aktuellen Schritt nicht verändert – das heißt, dass die tatsächliche
Nullstelle zwischen der „linken“ Grenze und der genäherten Nullstelle
liegt, – multipliziert man
im aktuellen Schritt nicht verändert – das heißt, dass die tatsächliche
Nullstelle zwischen der „linken“ Grenze und der genäherten Nullstelle
liegt, – multipliziert man  mit einem Faktor
mit einem Faktor  und bringt den Funktionswert an der Stelle
damit näher an Null.
und bringt den Funktionswert an der Stelle
damit näher an Null.
Entweder verkürzt sich somit der Abstand der Näherung zur Nullstelle im nächsten Schritt oder die Nullstelle wird im nächsten Schritt zwischen der tatsächlichen Nullstelle und der „rechten“ Intervallgrenze genähert.
Im zweiten Fall werden dann einfach „rechts“ und „links“ für den nächsten Schritt vertauscht. Da der zweite Fall irgendwann – auch in konvexen Intervallen – immer eintritt, ist sicher, dass keine der beiden Intervallgrenzen bis zum Abbruch stehen bleibt. Somit ist die Konvergenz garantiert superlinear.
Algorithmus
Den folgenden Algorithmus haben diese Verfahren gemeinsam:

Dabei sind  die Intervallgrenzen im -ten
Schritt,
die Intervallgrenzen im -ten
Schritt,  und
und  die Funktionswerte an den Stellen
und
die Funktionswerte an den Stellen
und  .
.
 sind die Abbruchgrenzen und
sind die Abbruchgrenzen und  der Verkürzungsfaktor.
der Verkürzungsfaktor.  steht hier für eine nicht näher spezifizierte, zweistellige Boolesche Funktion.
Sinnvolle Funktionen wären hier die Disjunktion,
die Konjunktion,
die Identität
des ersten und die Identität des zweiten Operanden. Im ersten Fall muss
eine der beiden Abbruchgrenzen, im zweiten Fall beide, im dritten Fall lediglich
steht hier für eine nicht näher spezifizierte, zweistellige Boolesche Funktion.
Sinnvolle Funktionen wären hier die Disjunktion,
die Konjunktion,
die Identität
des ersten und die Identität des zweiten Operanden. Im ersten Fall muss
eine der beiden Abbruchgrenzen, im zweiten Fall beide, im dritten Fall lediglich
 und im vierten Fall
und im vierten Fall  unterschritten werden, damit
unterschritten werden, damit  falsch wird und das Verfahren abbricht.
falsch wird und das Verfahren abbricht.
Die unterschiedlichen Verfahren unterscheiden sich lediglich im
Verkürzungsfaktor .
- Illinois-Verfahren

- Pegasus-Verfahren

- Anderson/Björck-Verfahren

Rekursive Implementierung des Pegasus-Verfahrens
Die zu untersuchende Funktion und die Abbruchkriterien:
epsx, epsf seien definiert f(x) sei definiert
Der Verkürzungsfaktor für das Pegasus-Verfahren:
m(f2, fz): return f2 ÷ (f2 + fz)
Der eigentliche, rekursive Algorithmus:
betterFalsePosition(x1, x2, f1, f2): z := x1 − f1 · (x2 − x1) ÷ (f2 − f1) // Näherung für die Nullstelle berechnen fz := f(z)
// Abbruchgrenze unterschritten?: z als Näherung zurückgeben if |x2 − x1| < epsx or |fz| < epsf then return z
// ansonsten, Nullstelle in [f(xz), f(x2)]?: „Links und Rechts“ vertauschen, Nullstelle in [f(xz), f(x2)] suchen if fz · f2 < 0 then return betterFalsePosition(x2, z, f2, fz)
// ansonsten: „verkürzen“ und Nullstelle in [x1, z] suchen return betterFalsePosition(x1, z, m(f2, fz) · f1, fz)
Die Methode, mit der das Verfahren für das zu untersuchende Intervall, gestartet wird:
betterFalsePosition(x1, x2): return betterFalsePosition(x1, x2, f(x1), f(x2))
Bemerkungen
- Die Konvergenz der Verfahren ist superlinear und mit der des Sekantenverfahrens vergleichbar.
- Durch die superlineare, garantierte Konvergenz und den relativ geringen Rechenaufwand je Iteration sind diese Verfahren bei eindimensionalen Problemen in der Regel anderen Verfahren (wie z.B. dem Newton-Verfahren) vorzuziehen.
Geschichte
Erste Erscheinungsformen der Regula falsi finden sich bereits in sehr alten mathematischen Texten. So finden sich beispielsweise im Papyrus Rhind (ca. 1550 v. Chr.) Anwendungen dieser Methode bei der Lösung linearer Gleichungssysteme.
Unter den ältesten erhaltenen Dokumenten, die vom Wissen um die Methode des doppelten falschen Ansetzens zeugen, befindet sich die indisch-mathematische Schrift „Vaishali Ganit“ (ca. 3. Jahrhundert v.Chr.). Der altchinesische mathematische Text Die Neun Kapitel der mathematischen Kunst (200 v.Chr. – 100 n.Chr.) erwähnt den Algorithmus ebenfalls. In diesem Text wurde das Verfahren in Beispielen allerdings nur auf lineare Gleichungen angewandt, sodass die Lösungen in nur einer Iteration erreicht wurden. Leonardo da Pisa (Fibonacci) beschrieb das Verfahren des doppelten falschen Ansetzens in seinem Buch „Liber Abaci“ (1202 n.Chr.), angelehnt an eine Methode, die er aus arabischen Quellen gelernt hatte.
Auch Adam Ries kannte die regula falsi und beschrieb die Methode wie folgt:
„wird angesetzt mit zwei falschen Zahlen, die der Aufgabe entsprechend gründlich überprüft werden sollen in dem Maße, wie es die gesuchte Zahl erfordert. Führen sie zu einem höheren Ergebnis, als es in Wahrheit richtig ist, so bezeichne sie mit dem Zeichen + plus, bei einem zu kleinen Ergebnis aber beschreibe sie mit dem Zeichen −, minus genannt. Sodann ziehe einen Fehlbetrag vom anderen ab. Was dabei als Rest bleibt, behalte für deinen Teiler. Danach multipliziere über Kreuz jeweils eine falsche Zahl mit dem Fehlbetrag der anderen. Ziehe eins vom anderen ab, und was da als Rest bleibt, teile durch den vorher berechneten Teiler. So kommt die Lösung der Aufgabe heraus. Führt aber eine falsche Zahl zu einem zu großen und die andere zu einem zu kleinen Ergebnis, so addiere die zwei Fehlbeträge. Was dabei herauskommt, ist dein Teiler. Danach multipliziere über Kreuz, addiere und dividiere. So kommt die Lösung der Aufgabe heraus.“


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 24.02. 2020