Kugelkoordinaten
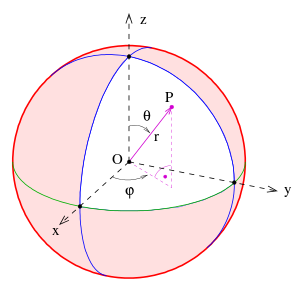
In Kugelkoordinaten oder räumlichen Polarkoordinaten wird ein Punkt im dreidimensionalen Raum durch seinen Abstand vom Ursprung und zwei Winkel angegeben.
Bei Punkten auf einer Kugeloberfläche (Sphäre) um den Koordinatenursprung ist der Abstand vom Kugelmittelpunkt konstant. Dann sind nur noch die beiden Winkel variabel, sie werden dann als sphärische Koordinaten oder Kugelflächenkoordinaten bezeichnet.
Der Begriff „Kugelkoordinaten“ kann als Oberbegriff für den allgemeinen Fall und die sphärischen Koordinaten angesehen werden. Kugelkoordinaten sind wie Zylinderkoordinaten eine Verallgemeinerung der ebenen Polarkoordinaten auf den dreidimensionalen euklidischen Raum. Sie lassen sich auch weiter auf Räume beliebiger endlicher Dimension verallgemeinern.
Übliche Konvention
Definition
 eines Punktes
eines Punktes  und kartesisches Koordinatensystem mit den Achsen
und kartesisches Koordinatensystem mit den Achsen  .
.Ein Kugelkoordinatensystem im dreidimensionalen euklidischen Raum wird festgelegt durch die Wahl
- eines Zentrums
 (Ursprung),
(Ursprung), - einer gerichteten Gerade durch das Zentrum (Polachse), die die Polrichtung (oder Zenitrichtung) angibt, und durch diese festgelegt die Äquatorebene, die orthogonal zur Polrichtung durch das Zentrum verläuft, und
- einer Bezugsrichtung in der Äquatorebene.
Oft wird gleichzeitig ein kartesisches Koordinatensystem verwendet. Dann wird typischerweise der Ursprung des kartesischen Koordinatensystems als Zentrum gewählt, die z-Achse als Polachse (und damit die x-y-Ebene als Äquatorebene) und die x-Achse als Bezugsrichtung.
In der Version der Kugelkoordinaten, die in der Mathematik und in der Physik
üblich ist, wird ein Punkt
durch die folgenden drei Koordinaten
festgelegt:
 ,
der Radius,
ist der Abstand des Punktes
von ,
hiermit wird die Kugeloberfläche festgelegt, auf der sich
befindet.
,
der Radius,
ist der Abstand des Punktes
von ,
hiermit wird die Kugeloberfläche festgelegt, auf der sich
befindet. oder
oder  ,
der Polarwinkel oder Poldistanzwinkel,
ist der Winkel zwischen der Polrichtung und der Strecke
,
der Polarwinkel oder Poldistanzwinkel,
ist der Winkel zwischen der Polrichtung und der Strecke  ,
gezählt von
,
gezählt von  bis
bis  (0° bis 180°), hierdurch wird der Ort des Punktes
auf eine Kreislinie der Kugeloberfläche
festgelegt.
(0° bis 180°), hierdurch wird der Ort des Punktes
auf eine Kreislinie der Kugeloberfläche
festgelegt. oder
oder  ,
der Azimutwinkel,
ist der Winkel zwischen der Bezugsrichtung und der Orthogonalprojektion der
Strecke ,
gezählt von
,
der Azimutwinkel,
ist der Winkel zwischen der Bezugsrichtung und der Orthogonalprojektion der
Strecke ,
gezählt von  bis
(−180° bis 180°) oder von 0 bis
bis
(−180° bis 180°) oder von 0 bis  (0° bis 360°) gegen den Uhrzeigersinn. Hierdurch wird der Ort des Punktes
auf der Kreislinie eindeutig definiert.
(0° bis 360°) gegen den Uhrzeigersinn. Hierdurch wird der Ort des Punktes
auf der Kreislinie eindeutig definiert.
Die nebenstehende Abbildung
zeigt einen Punkt
mit den Kugelkoordinaten  .
Die beiden Winkelgrößen
und
werden auch als Winkelkoordinaten bezeichnet.
.
Die beiden Winkelgrößen
und
werden auch als Winkelkoordinaten bezeichnet.
Umrechnungen
Jedem Koordinatentripel
wird ein Punkt im dreidimensionalen euklidischen Raum zugeordnet
(Parametrisierung). Wählt man ein kartesisches Koordinatensystem wie oben, so
kann die Zuordnung durch die folgenden Gleichungen
beschrieben werden:

Bei diesen Gleichungen können für ,
und
beliebige Zahlenwerte eingesetzt werden. Damit die Kugelkoordinaten eindeutig
bestimmt sind, muss man den Wertebereich der Koordinaten einschränken.
Üblicherweise wird der Radius
auf nichtnegative Werte beschränkt, der Winkel
auf das Intervall
![[0,\pi ]](/svg/3e2a912eda6ef1afe46a81b518fe9da64a832751.svg) bzw. [0, 180°] und der Winkel
entweder auf das Intervall
bzw. [0, 180°] und der Winkel
entweder auf das Intervall ![(-\pi ,\pi ]](/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c.svg) bzw. (−180°, 180°] oder das Intervall
bzw. (−180°, 180°] oder das Intervall  bzw. [0, 360°). Auch dann gibt es ausgeartete Punkte, für die die
Winkelkoordinaten nicht eindeutig sind. Für Punkte auf der z-Achse ist
der Winkel
nicht festgelegt, also beliebig. Für den Ursprung ist auch
beliebig. Um Eindeutigkeit zu erreichen, kann man für diese Punkte
bzw. [0, 360°). Auch dann gibt es ausgeartete Punkte, für die die
Winkelkoordinaten nicht eindeutig sind. Für Punkte auf der z-Achse ist
der Winkel
nicht festgelegt, also beliebig. Für den Ursprung ist auch
beliebig. Um Eindeutigkeit zu erreichen, kann man für diese Punkte  festlegen und für den Ursprung zusätzlich
festlegen und für den Ursprung zusätzlich  .
.
Für die anderen Punkte lassen sich die Kugelkoordinaten
aus den kartesischen Koordinaten  durch die folgenden Gleichungen berechnen:
durch die folgenden Gleichungen berechnen:



Die angegebenen Gleichungen für den Winkel
gelten, wenn
zwischen
und
gewählt wird. Wählt man
zwischen 0 und ,
so sind sie geeignet zu modifizieren.
In der Analysis und ihren Anwendungen werden Kugelkoordinaten-Winkel meist im Bogenmaß angegeben.
Anwendungen
Kugelkoordinaten werden oft bei der Untersuchung von Systemen verwendet, die rotationssymmetrisch bezüglich eines Punktes sind. Beispiele sind: Volumenintegrale über Kugeln, die Beschreibung und Untersuchung rotationssymmetrischer Kraftfelder, wie z.B. das Gravitationsfeld eines kugelförmigen Himmelskörpers, das elektrische Feld einer Punktladung oder einer geladenen Kugel. Die betrachteten Größen hängen dann nicht von den Winkelkoordinaten ab, was viele Formeln vereinfacht. Wichtige partielle Differentialgleichungen wie die Laplace-Gleichung oder die Helmholtzgleichung können in Kugelkoordinaten durch Separation der Variablen gelöst werden.
Andere Konventionen
Die obige Koordinatenwahl ist internationaler Konsens in der theoretischen
Physik. Manchmal werden die Zeichen
und
aber im umgekehrten Sinne verwendet, insbesondere in amerikanischer Literatur.
Der Polarwinkel
ist nicht die geographische
Breite, sondern lässt sich mit der Kobreite
identifizieren. Die geographische Breite ist der Winkel zwischen der Äquatorialebene
und dem Ortsvektor und nimmt Werte zwischen  und
und  an. Wird sie mit
bezeichnet, so ist
an. Wird sie mit
bezeichnet, so ist  .
Hingegen kann man das oben benutzte
ohne weiteres mit der geographischen
Länge
.
Hingegen kann man das oben benutzte
ohne weiteres mit der geographischen
Länge  östlich von Greenwich
gleichsetzen (siehe geographische
Koordinaten).
östlich von Greenwich
gleichsetzen (siehe geographische
Koordinaten).
Die obige Konstruktion ist in gewisser Hinsicht inkonsistent mit dem Aufbau der ebenen Polarkoordinaten. Für manche Probleme ist es praktischer, die Darstellung



zu benutzen. In dieser Darstellung entspricht
der geographischen Breite.
Die Rücktransformation des Punktes bzw. Vektors
 in die Winkelbestandteile erfolgt dann mit
in die Winkelbestandteile erfolgt dann mit

 ,
,
wobei  .
.
Transformation von Differentialen
Jacobi-Matrix
Die lokalen Eigenschaften der Koordinatentransformation werden durch die Jacobi-Matrix beschrieben. Für die Transformation von Kugelkoordinaten in kartesische Koordinaten lautet diese

Die zugehörige Funktionaldeterminante lautet:

Man berechnet die Jacobi-Matrix der entgegengesetzten Transformation am
einfachsten als Inverse
von  :
:

Einige Komponenten dieser Matrix sind Brüche,
an deren Nennern man die Uneindeutigkeit der Polarkoordinaten bei  und bei
und bei  (also
(also  oder
oder  )
erkennt. Weniger gebräuchlich ist die Darstellung in kartesischen Koordinaten:
)
erkennt. Weniger gebräuchlich ist die Darstellung in kartesischen Koordinaten:

Differentiale, Volumenelement, Flächenelement, Linienelement
Die Jacobi-Matrix erlaubt es, die Umrechnung von Differentialen übersichtlich als lineare Abbildung zu schreiben:

beziehungsweise
 .
.
Das Volumenelement
 lässt sich besonders einfach mit Hilfe der Funktionaldeterminante
lässt sich besonders einfach mit Hilfe der Funktionaldeterminante
umrechnen:
 .
.
Durch Differentiation  erhält man für das Flächenelement
erhält man für das Flächenelement  auf einer Sphäre mit Radius
auf einer Sphäre mit Radius

Das Linienelement
 errechnet man gemäß
errechnet man gemäß

Metrik und Rotationsmatrix
Im Fehlen gemischter Glieder im Linienelement  spiegelt sich wider, dass der metrische
Tensor
spiegelt sich wider, dass der metrische
Tensor

auch in Kugelkoordinaten keine Außerdiagonalelemente hat.
Der metrische Tensor ist offensichtlich das Quadrat der Diagonalmatrix
 .
.
Mit Hilfe dieser Matrix lässt sich die Jacobi-Matrix als  schreiben, wobei
schreiben, wobei  die Rotationsmatrix
die Rotationsmatrix

ist.
Transformation von Vektorfeldern und -Operatoren

Im Folgenden soll die Transformation von Vektoren und Differentialoperatoren exemplarisch dargestellt werden. Die Ergebnisse werden bevorzugt in kompakter Form unter Benutzung von Transformationsmatrizen geschrieben. Die allermeisten Aussagen und Formeln gelten nur für Punkte außerhalb der z-Achse, für die die Jacobi-Determinante ungleich null ist.
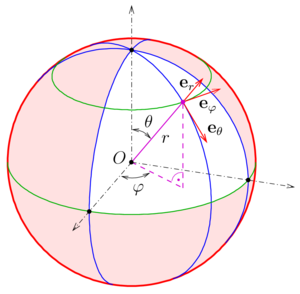
Transformation der Vektorraumbasis
Der Basisvektor
 zur Koordinate
gibt an, in welche Richtung sich ein Punkt
zur Koordinate
gibt an, in welche Richtung sich ein Punkt  bewegt, wenn die Koordinate
um einen infinitesimalen Betrag
bewegt, wenn die Koordinate
um einen infinitesimalen Betrag  verändert wird:
verändert wird:
 .
.
Daraus erhält man
 .
.
Um eine orthonormale
Basis zu erhalten, muss  noch auf die Länge
noch auf die Länge  normiert werden:
normiert werden:
 .
.
Auf gleiche Weise erhält man die Basisvektoren  und
und  :
:


Als Spaltenvektoren geschrieben:

Diese Basisvektoren bilden in der Reihenfolge
ein Rechtssystem.
Die zugehörigen Richtungen werden auch radial, meridional und azimutal genannt. Diese Begriffe spielen nicht nur in der Astronomie und den Geowissenschaften (z.B. Geographie, Geologie oder Geophysik) eine zentrale Rolle, sondern auch in Mathematik, Physik und verschiedenen Ingenieurwissenschaften, etwa bei der Ausstrahlung von elektromagnetischen Wellen („Hertzscher Dipol“) durch eine in z-Richtung aufgespannte Antenne, wo die Ausstrahlung in radialer Richtung erfolgt, während elektrisches bzw. magnetisches Feld in meridionaler bzw. azimutaler Richtung schwingen.
Mithilfe der oben eingeführten Rotationsmatrix
lassen sich die Transformationen auch kompakt darstellen:
 .
.
In die Gegenrichtung lauten die Gleichungen dann:
 .
.
(Dabei wird verwendet, dass
orthogonal ist und deshalb  .)
.)
Transformation eines Vektorfeldes
Ein Vektor, als ein geometrisches Objekt, muss vom Koordinatensystem unabhängig sein:

Diese Bedingung wird erfüllt durch
 beziehungsweise
beziehungsweise  .
.
Transformation der partiellen Ableitungen
Die partiellen Ableitungen transformieren sich wie die Basisvektoren, aber
ohne Normierung. Man kann genau wie oben rechnen, nur lässt man den Punkt
im Zähler weg (tatsächlich werden in der modernen Formulierung der Differentialgeometrie
die Koordinatenbasisvektoren des Tangentialraums
und die partiellen Ableitungen gleichgesetzt) und verwendet die Jacobi-Matrix
anstelle der Rotationsmatrix .
Die Transformation lautet also:
 ,
,
und in die Gegenrichtung
 .
.
Transformation des Nabla-Operators
Der Nabla-Operator
 hat nur in kartesischen Koordinaten die einfache Form
hat nur in kartesischen Koordinaten die einfache Form
 .
.
Sowohl die partiellen Ableitungen als auch die Einheitsvektoren muss man in der oben hergeleiteten Weise transformieren. Man findet:
 .
.
In dieser Form kann der transformierte Nabla-Operator unmittelbar angewandt werden, um den Gradienten eines in Kugelkoordinaten gegebenen Skalarfeldes zu berechnen.
Um die Divergenz
eines in Kugelkoordinaten gegebenen Vektorfeldes A zu berechnen, ist
hingegen zu berücksichtigen, dass
nicht nur auf die Koeffizienten  wirkt, sondern auch auf die in A implizit enthaltenen Basisvektoren
wirkt, sondern auch auf die in A implizit enthaltenen Basisvektoren

Um die Rotation eines in Kugelkoordinaten gegebenen Vektorfeldes A zu berechnen, ist dasselbe zu berücksichtigen:

Transformation des Laplace-Operators
Wenn man in der Divergenzformel als Vektorfeld A den
Gradientenoperator
einsetzt, findet man den Laplace-Operator
 .
.
bzw.
 .
.
Verallgemeinerung auf n-dimensionale Kugelkoordinaten
Eine Verallgemeinerung der Kugelkoordinaten auf  Dimensionen:
Dimensionen:

Die Winkel entwickeln sich nach:

Durch Umnummerierung erhält man eine Rekursionsformel für die Winkel:

Woraus sich die folgenden Winkel ergeben:

mit  und
und

Der Radius ist:

Eine Fallunterscheidung liefert mittels Arkustangens den passenden
Winkel zur gegebenen kartesischen
Koordinate, wobei  :
:

Dabei fällt auf, dass  immer ein zweidimensionaler Vektor ist für
immer ein zweidimensionaler Vektor ist für  .
.
Jacobi-Matrix
Die Jacobi-Matrix der Kugelkoordinaten lautet bezüglich der als oberes gegebenen Nummerierung:

Ihre Determinante beträgt:

Das Integral über den Betrag dieser Determinante lässt sich mit der Gammafunktion  angeben.
angeben.

Dies entspricht dem Kugelvolumen einer -dimensionalen
Hyperkugel:

Beispiele
2D:

3D:

4D:

Beispiel
Zuordnung am Beispiel  mit den geläufigen Koordinatenachsen :
mit den geläufigen Koordinatenachsen :

Die Winkel sind dann:



© biancahoegel.de
Datum der letzten Änderung: Jena, den: 20.02. 2022