Differential (Mathematik)
Ein Differential (oder Differenzial) bezeichnet in der Analysis den linearen Anteil des Zuwachses einer Variablen oder einer Funktion und beschreibt einen unendlich kleinen Abschnitt auf der Achse eines Koordinatensystems. Historisch war der Begriff im 17. und 18. Jahrhundert der Kern der Entwicklung der Infinitesimalrechnung. Ab dem 19. Jahrhundert wurde die Analysis durch Augustin Louis Cauchy und Karl Weierstraß auf der Grundlage des Grenzwertbegriffes mathematisch korrekt neu aufgebaut, und der Begriff des Differentials verlor für die elementare Differential- und Integralrechnung an Bedeutung.
Besteht eine funktionale Abhängigkeit  mit einer differenzierbaren
Funktion
mit einer differenzierbaren
Funktion  ,
dann lautet der grundlegende Zusammenhang zwischen dem Differential
,
dann lautet der grundlegende Zusammenhang zwischen dem Differential  der abhängigen Variablen und dem Differential
der abhängigen Variablen und dem Differential  der unabhängigen Variablen
der unabhängigen Variablen
 ,
,
wobei  die Ableitung von
an der Stelle
die Ableitung von
an der Stelle  bezeichnet. Anstelle von
schreibt man auch
bezeichnet. Anstelle von
schreibt man auch  oder
oder  .
Diese Beziehung lässt sich mit Hilfe partieller
Ableitungen auf Funktionen mehrerer Variabler verallgemeinern und führt dann
auf den Begriff des totalen
Differentials.
.
Diese Beziehung lässt sich mit Hilfe partieller
Ableitungen auf Funktionen mehrerer Variabler verallgemeinern und führt dann
auf den Begriff des totalen
Differentials.
Differentiale werden heute in verschiedenen Anwendungen in unterschiedlicher
Bedeutung und auch mit unterschiedlicher mathematischer
Strenge verwendet. Die in Standardschreibweisen wie  für Integrale oder
für Integrale oder  für Ableitungen auftretenden Differentiale werden heutzutage üblicherweise als
bloßer Notationsbestandteil ohne eigenständige Bedeutung angesehen.
für Ableitungen auftretenden Differentiale werden heutzutage üblicherweise als
bloßer Notationsbestandteil ohne eigenständige Bedeutung angesehen.
Eine rigorose Definition liefert die in der Differentialgeometrie verwendete Theorie der Differentialformen, wo Differentiale als exakte 1-Formen interpretiert werden. Einen anders gearteten Zugang vermittelt die Nichtstandardanalysis, die den historischen Begriff der Infinitesimalzahl wieder aufgreift und im Sinne der modernen Mathematik präzisiert.
Einordnung
In seinen 1924 erstmals erschienenen „Vorlesungen über Differential- und
Integralrechnung“ schreibt Richard
Courant, dass die Idee des Differentials als unendlich kleine Größe keine
Bedeutung habe und es deshalb nutzlos sei, die Ableitung als Quotient zweier
solcher Quantitäten zu definieren, dass man aber trotzdem versuchen könne, den
Ausdruck  als tatsächlichen Quotienten zweier Quantitäten
und
zu definieren. Dafür definiere man zunächst
als tatsächlichen Quotienten zweier Quantitäten
und
zu definieren. Dafür definiere man zunächst  wie üblich als
wie üblich als  und betrachte dann für ein festes
den Zuwachs
und betrachte dann für ein festes
den Zuwachs  als eine unabhängige Variable. (Diese bezeichne man als
als eine unabhängige Variable. (Diese bezeichne man als  .)
Dann definiere man
.)
Dann definiere man  ,
womit man tautologisch
,
womit man tautologisch  bekomme.
bekomme.
In modernerer Terminologie kann man das Differential in
als lineare Abbildung vom Tangentialraum
 in die reellen Zahlen auffassen. Dem „Tangentialvektor“
in die reellen Zahlen auffassen. Dem „Tangentialvektor“  wird die reelle Zahl
wird die reelle Zahl  zugeordnet und diese lineare Abbildung ist per Definition das Differential .
Also
zugeordnet und diese lineare Abbildung ist per Definition das Differential .
Also  und insbesondere
und insbesondere  ,
woraus sich tautologisch die Beziehung
,
woraus sich tautologisch die Beziehung  ergibt.
ergibt.
Das Differential als linearisierter Zuwachs
Ist  eine reelle Funktion einer reellen Variablen, so bewirkt eine Änderung des
Arguments um
eine reelle Funktion einer reellen Variablen, so bewirkt eine Änderung des
Arguments um  von
auf
von
auf  eine Änderung des Funktionswertes von
auf
eine Änderung des Funktionswertes von
auf  ;
für den Zuwachs des Funktionswerts gilt also
;
für den Zuwachs des Funktionswerts gilt also
 .
.
Ist beispielsweise
eine (affin)
lineare Funktion, also  ,
so folgt
,
so folgt  .
Das heißt, der Zuwachs des Funktionswerts ist in diesem einfachen Fall direkt
proportional zum Zuwachs des Arguments und das Verhältnis
.
Das heißt, der Zuwachs des Funktionswerts ist in diesem einfachen Fall direkt
proportional zum Zuwachs des Arguments und das Verhältnis  entspricht gerade der konstanten Steigung
entspricht gerade der konstanten Steigung  von .
von .
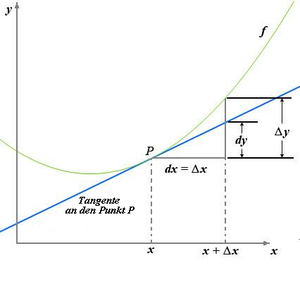
 als linearer Anteil des Zuwachses
als linearer Anteil des Zuwachses 
Bei Funktionen, deren Steigung nicht konstant ist, ist die Situation
komplizierter. Ist
an der Stelle
differenzierbar, dann ist die Steigung dort gegeben durch die Ableitung ,
wobei diese als Grenzwert
des Differenzenquotienten definiert ist:
 .
.
Betrachtet man nun für  die Differenz zwischen dem Differenzenquotienten und der Ableitung
die Differenz zwischen dem Differenzenquotienten und der Ableitung
 ,
,
so folgt für den Zuwachs des Funktionswertes
 .
.
In dieser Darstellung wird  zerlegt in einen Anteil
zerlegt in einen Anteil  ,
der linear von
abhängt, und einen Rest, der von höherer als linearer Ordnung verschwindet, in
dem Sinne, dass
,
der linear von
abhängt, und einen Rest, der von höherer als linearer Ordnung verschwindet, in
dem Sinne, dass  gilt. Der lineare Anteil des Zuwachses, der deshalb für kleine Werte von
im Allgemeinen einen guten Näherungswert für
darstellt, wird Differential von
genannt und mit
bezeichnet.
gilt. Der lineare Anteil des Zuwachses, der deshalb für kleine Werte von
im Allgemeinen einen guten Näherungswert für
darstellt, wird Differential von
genannt und mit
bezeichnet.
Definition
Es sei  eine Funktion mit Definitionsbereich
eine Funktion mit Definitionsbereich  .
Ist
an der Stelle
.
Ist
an der Stelle  differenzierbar und
differenzierbar und  ,
dann heißt
,
dann heißt

das Differential von
an der Stelle
zum Argumentzuwachs  .
Statt
schreibt man häufig auch .
Gilt ,
so schreibt man auch
anstelle von .
.
Statt
schreibt man häufig auch .
Gilt ,
so schreibt man auch
anstelle von .
Für ein fest gewähltes
ist das Differential
also eine lineare Funktion, die jedem Argument
den Wert  zuordnet.
zuordnet.
Beispielsweise für die identische
Funktion  ,
,
 gilt also wegen
gilt also wegen  die Gleichung
die Gleichung  und somit
in diesem Beispiel
und somit
in diesem Beispiel  .
.
Differentiale höherer Ordnung
Ist
an der Stelle 
 -mal
differenzierbar (
-mal
differenzierbar ( )
und
)
und  ,
so heißt
,
so heißt

das Differential -ter
Ordnung von
an der Stelle
zum Argumentzuwachs .
In diesem Produkt bezeichnet  die -te
Ableitung von
an der Stelle
und
die -te
Ableitung von
an der Stelle
und  die -te
Potenz der Zahl .
die -te
Potenz der Zahl .
Die Bedeutung dieser Definition wird bei Courant
wie folgt erklärt. Wenn man sich
fest gewählt denkt, und zwar denselben Wert  für verschiedene
für verschiedene  ,
also
,
also  festgehalten, dann ist
eine Funktion von ,
von der man wieder das Differential
festgehalten, dann ist
eine Funktion von ,
von der man wieder das Differential  bilden kann (s. Abb.). Das Ergebnis ist das zweite Differential
bilden kann (s. Abb.). Das Ergebnis ist das zweite Differential  ,
man erhält es, indem man in
,
man erhält es, indem man in  (dem Zuwachs von )
den Term in Klammern durch seinen Linearteil
(dem Zuwachs von )
den Term in Klammern durch seinen Linearteil  ersetzt, womit also
ersetzt, womit also  ist. Auf analoge Weise kann man die Definition von Differentialen höherer
Ordnung motivieren. Es gilt dann entsprechend z.B.
ist. Auf analoge Weise kann man die Definition von Differentialen höherer
Ordnung motivieren. Es gilt dann entsprechend z.B.  und allgemein
und allgemein  .
.
Für ein fest gewähltes
ist das Differential  also wieder eine (für
also wieder eine (für  nicht-lineare) Funktion, die jedem Argument
den Wert
nicht-lineare) Funktion, die jedem Argument
den Wert  zuordnet.
zuordnet.
Rechenregeln
Unabhängig von der verwendeten Definition gelten für Differentiale die
folgenden Rechenregeln. Im Folgenden bezeichnen
die unabhängige Variable,  abhängige Variablen beziehungsweise Funktionen und
abhängige Variablen beziehungsweise Funktionen und  eine beliebige reelle Konstante. Die Ableitung von
eine beliebige reelle Konstante. Die Ableitung von  nach
wird
nach
wird  geschrieben. Dann ergeben sich die nachfolgenden Rechenregeln aus der Beziehung
geschrieben. Dann ergeben sich die nachfolgenden Rechenregeln aus der Beziehung

und den Ableitungsregeln.
Die folgenden Rechenregeln für Differentiale von Funktionen
sind so zu verstehen, dass jeweils die nach Einsetzen der Argumente  erhaltenen Funktionen übereinstimmen sollen. Die Regel
erhaltenen Funktionen übereinstimmen sollen. Die Regel  zum Beispiel besagt, dass man in jedem
zum Beispiel besagt, dass man in jedem  die Identität
die Identität  hat und dies bedeutet nach Definition, dass für alle reellen Zahlen
die Gleichung
hat und dies bedeutet nach Definition, dass für alle reellen Zahlen
die Gleichung  gelten soll.
gelten soll.
Konstante und konstanter Faktor
 und
und
Addition und Subtraktion
- ;
und

Multiplikation
auch Produktregel genannt:

Division

Kettenregel
- Ist
 abhängig von
und
von ,
also
abhängig von
und
von ,
also  und
und  ,
dann gilt
,
dann gilt
-
 .
.
Beispiele
- Für
 und
und  gilt
gilt  bzw.
bzw.  .
Es folgt
.
Es folgt
-
 .
.
- Für
 und
und  gilt
gilt  und
und  ,
also
,
also
-
 .
.
Erweiterung und Varianten
Anstatt  finden sich folgende Symbole, die Differentiale bezeichnen:
finden sich folgende Symbole, die Differentiale bezeichnen:
- Mit
 (eingeführt von Condorcet, Legendre und dann Jacobi sieht man es in alter
französischer Schreibschrift, oder als eine Variante des kursiven kyrillischen
d) wird ein partielles
Differential bezeichnet.
(eingeführt von Condorcet, Legendre und dann Jacobi sieht man es in alter
französischer Schreibschrift, oder als eine Variante des kursiven kyrillischen
d) wird ein partielles
Differential bezeichnet. - Mit
 (dem griechischen kleinen Delta) wird eine virtuelle Verschiebung, die
Variation eines Ortsvektors bezeichnet. Sie hängt also mit dem partiellen
Differential nach den einzelnen Raumdimensionen des Ortsvektors zusammen.
(dem griechischen kleinen Delta) wird eine virtuelle Verschiebung, die
Variation eines Ortsvektors bezeichnet. Sie hängt also mit dem partiellen
Differential nach den einzelnen Raumdimensionen des Ortsvektors zusammen. - Mit
wird ein inexaktes
Differential bezeichnet.
Totales Differential
Das totale
Differential oder vollständige Differential einer differenzierbaren Funktion
 in
Variablen ist definiert durch
in
Variablen ist definiert durch
 .
.
Dies ist wieder interpretierbar als der lineare Anteil des Zuwachses. Eine
Änderung des Arguments um
bewirkt eine Änderung des Funktionswertes um ,
welche zerlegbar ist als
 ,
,
wobei der erste Summand das Skalarprodukt
der beiden -elementigen
Vektoren  und
darstellt und der Rest von höherer Ordnung verschwindet, also
und
darstellt und der Rest von höherer Ordnung verschwindet, also  .
.
Virtuelle Verschiebung
Eine virtuelle Verschiebung  ist eine fiktive infinitesimale Verschiebung des
ist eine fiktive infinitesimale Verschiebung des  -ten
Teilchens, die mit Zwangsbedingungen
verträglich ist. Die Abhängigkeit von der Zeit wird nicht betrachtet. Aus dem
totalen Differential
-ten
Teilchens, die mit Zwangsbedingungen
verträglich ist. Die Abhängigkeit von der Zeit wird nicht betrachtet. Aus dem
totalen Differential  einer Funktion
einer Funktion  entsteht die gesuchte virtuelle Änderung
entsteht die gesuchte virtuelle Änderung  .
Der Begriff „instantan“ ist dadurch mathematisiert.
.
Der Begriff „instantan“ ist dadurch mathematisiert.
Die  holonomen Zwangsbedingungen,
holonomen Zwangsbedingungen,  ,
werden durch Verwendung von
,
werden durch Verwendung von  sogenannter generalisierter
Koordinaten
sogenannter generalisierter
Koordinaten  erfüllt:
erfüllt:

Die holonomen Zwangsbedingungen werden also durch Auswahl und entsprechende Reduzierung der generalisierten Koordinaten explizit eliminiert.
Stochastische Analysis
In der stochastischen
Analysis wird die Differentialschreibweise häufig angewendet, etwa zur
Notation stochastischer
Differentialgleichungen; sie ist dann stets als Kurzschreibweise für eine
entsprechende Gleichung von Itō-Integralen
aufzufassen. Ist beispielsweise  ein stochastischer
Prozess, der bezüglich eines Wiener-Prozesses >
ein stochastischer
Prozess, der bezüglich eines Wiener-Prozesses > Itō-integrierbar ist, dann wird die durch
Itō-integrierbar ist, dann wird die durch

gegebene Gleichung für einen Prozess  in Differentialform als
in Differentialform als  notiert. Die oben genannten Rechenregeln für Differentiale sind jedoch im Fall
stochastischer Prozesse mit nichtverschwindender quadratischer
Variation gemäß dem Lemma
von Itō zu modifizieren.
notiert. Die oben genannten Rechenregeln für Differentiale sind jedoch im Fall
stochastischer Prozesse mit nichtverschwindender quadratischer
Variation gemäß dem Lemma
von Itō zu modifizieren.
Heutiger Zugang: Differentiale als 1-Formen
Die oben gegebene Definition des Differentials  entspricht in heutiger Terminologie dem Begriff der exakten 1-Form .
entspricht in heutiger Terminologie dem Begriff der exakten 1-Form .
Es sei  eine offene Teilmenge des
eine offene Teilmenge des  .
Eine 1-Form oder Pfaffsche Form
.
Eine 1-Form oder Pfaffsche Form  auf
ordnet jedem Punkt
auf
ordnet jedem Punkt  eine Linearform
eine Linearform  zu. Derartige Linearformen heißen Kotangentialvektoren; sie sind Elemente
des Dualraumes
zu. Derartige Linearformen heißen Kotangentialvektoren; sie sind Elemente
des Dualraumes  des Tangentialraumes
des Tangentialraumes  .
Eine pfaffsche Form
ist also eine Abbildung
.
Eine pfaffsche Form
ist also eine Abbildung

Das totale Differential oder die äußere Ableitung  einer differenzierbaren Funktion
einer differenzierbaren Funktion  ist die pfaffsche Form, die folgendermaßen definiert ist: Ist
ist die pfaffsche Form, die folgendermaßen definiert ist: Ist  ein Tangentialvektor, so ist:
ein Tangentialvektor, so ist:  also gleich der Richtungsableitung von
in Richtung
also gleich der Richtungsableitung von
in Richtung  .
Ist also
.
Ist also  ein Weg mit
ein Weg mit  und
und  ,
so ist
,
so ist

Mit Hilfe des Gradienten
und des Standard-Skalarproduktes
lässt sich das totale Differential von
durch

darstellen.
Für  erhält man insbesondere das Differential
von Funktionen .
erhält man insbesondere das Differential
von Funktionen .
Differentiale in der Integralrechnung
Anschauliche Erklärung
Um den Flächeninhalt eines Bereiches zu berechnen, der von dem Graphen einer Funktion
,
der -Achse
und zwei dazu senkrechten Geraden  und
und  eingeschlossen wird, unterteilte man die Fläche in Rechtecke der Breite ,
die „unendlich schmal“ gemacht werden, und der Höhe
eingeschlossen wird, unterteilte man die Fläche in Rechtecke der Breite ,
die „unendlich schmal“ gemacht werden, und der Höhe  .
Ihr jeweiliger Flächeninhalt ist das „Produkt“
.
Ihr jeweiliger Flächeninhalt ist das „Produkt“
 ,
,
der gesamte Flächeninhalt also die Summe

wobei hier
wieder eine endliche Größe ist, die einer Unterteilung des Intervalls ![[a, b]](/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg) entspricht. Siehe genauer: Mittelwertsatz
der Integralrechnung. Es gibt im Intervall
einen festen Wert
entspricht. Siehe genauer: Mittelwertsatz
der Integralrechnung. Es gibt im Intervall
einen festen Wert  ,
dessen Funktionswert multipliziert mit der Summe der endlichen
des Intervalls
den Wert des Integrals dieser einen stetigen Funktion wiedergibt:
,
dessen Funktionswert multipliziert mit der Summe der endlichen
des Intervalls
den Wert des Integrals dieser einen stetigen Funktion wiedergibt:

Das Gesamtintervall
des Integrals muss nicht gleichmäßig unterteilt sein. Die Differentiale an den
unterschiedlichen Unterteilungsstellen können verschieden groß gewählt sein, die
Wahl der Unterteilung des Integrationsintervalls hängt oft von der Art des
Integrationsproblems ab. Zusammen mit dem Funktionswert innerhalb des
„differentiellen“ Intervalls (beziehungsweise des Maximal- und Minimalwerts
darinnen entsprechend Ober- und Untersumme) bildet sich eine Flächengröße; man
macht den Grenzwertübergang in dem Sinne, dass man die Unterteilung von
immer feiner wählt. Das Integral ist eine Definition für eine Fläche mit
Begrenzung durch ein Kurvenstück.
Formale Erklärung
Es sei
eine integrierbare
Funktion mit Stammfunktion
 .
Das Differential
.
Das Differential

ist eine 1-Form, die nach den Regeln der Integration
von Differentialformen integriert werden kann. Das Ergebnis der Integration
über ein Intervall ![\left[a,b\right]](/svg/f30926fb280a9fdf66fd931e14d4363cb824feaa.svg) ist genau das Lebesgue-Integral
ist genau das Lebesgue-Integral
 .
.
Historisches
Gottfried
Wilhelm Leibniz verwendet erstmals in einem Manuskript 1675 in der
Abhandlung Analysis tetragonistica das Integralzeichen, er schreibt nicht
 sondern
sondern  .
Am 11. November 1675 verfasste Leibniz einen Aufsatz mit dem Titel „Beispiele
zur umgekehrten Tangentenmethode“ und hier kommt neben
zum ersten Mal
vor, ebenso statt
.
Am 11. November 1675 verfasste Leibniz einen Aufsatz mit dem Titel „Beispiele
zur umgekehrten Tangentenmethode“ und hier kommt neben
zum ersten Mal
vor, ebenso statt  die Schreibweise
die Schreibweise  .
.
In der modernen Fassung dieses Zugangs zur Integralrechnung
nach Bernhard
Riemann ist das „Integral“ ein Grenzwert der Flächeninhalte endlich vieler
Rechtecke endlicher Breite für immer feinere Unterteilungen des „-Bereichs“.
Deshalb ist das erste Symbol im Integral ein stilisiertes S für „Summe“.
„Utile erit scribi  pro omnia (Es wird nützlich sein,
anstatt omnia zu schreiben) und ∫ l um die Summe einer Gesamtheit ∫ zu
bezeichnen … Hier zeigt sich eine neue Gattung des Kalküls; ist dagegen
pro omnia (Es wird nützlich sein,
anstatt omnia zu schreiben) und ∫ l um die Summe einer Gesamtheit ∫ zu
bezeichnen … Hier zeigt sich eine neue Gattung des Kalküls; ist dagegen  gegeben, so bietet sich ein entgegengesetzter Kalkül mit der Bezeichnung
gegeben, so bietet sich ein entgegengesetzter Kalkül mit der Bezeichnung  ,
wie nämlich ∫ die Abmessungen vermehrt, so vermindert sie d. ∫ bedeutet aber die
Summe, d die Differenz.“ schreibt Leibniz am 29. Oktober 1675 in einer
Untersuchung, in der er die Cavalierischen Gesamtheiten verwendet. In der
späteren Niederschrift von 11. November 1675 geht er von der Schreibweise
,
wie nämlich ∫ die Abmessungen vermehrt, so vermindert sie d. ∫ bedeutet aber die
Summe, d die Differenz.“ schreibt Leibniz am 29. Oktober 1675 in einer
Untersuchung, in der er die Cavalierischen Gesamtheiten verwendet. In der
späteren Niederschrift von 11. November 1675 geht er von der Schreibweise  zu dx über, er verzeichnet in einer Fußnote „dx ist gleich “,
in derselben Rechnung kommt auch die Formel
zu dx über, er verzeichnet in einer Fußnote „dx ist gleich “,
in derselben Rechnung kommt auch die Formel  vor.
Omnia steht dabei für omnia l und wird in dem geometrisch orientierten
Flächenberechnungsverfahren von Bonaventura
Cavalieri verwendet. Die zugehörige gedruckte Veröffentlichung Leibniz’ ist
De geometria recondita aus dem Jahr 1686. Leibniz gab sich mit der
Bezeichnungsweise Mühe, „um die Rechnung kalkülmäßig einfach und zwangsläufig zu
machen.“
vor.
Omnia steht dabei für omnia l und wird in dem geometrisch orientierten
Flächenberechnungsverfahren von Bonaventura
Cavalieri verwendet. Die zugehörige gedruckte Veröffentlichung Leibniz’ ist
De geometria recondita aus dem Jahr 1686. Leibniz gab sich mit der
Bezeichnungsweise Mühe, „um die Rechnung kalkülmäßig einfach und zwangsläufig zu
machen.“
Blaise Pascals Betrachtungen zum Viertelkreisbogen: Quarts de Cercle
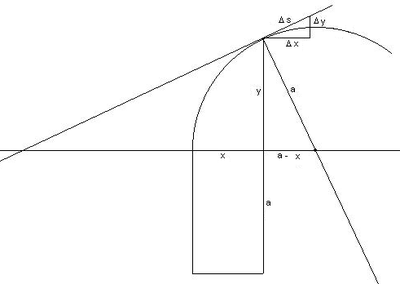
Als Leibniz als junger Mann 1673 in Paris war, empfing er eine entscheidende Anregung durch eine Betrachtung Pascals in dessen 1659 erschienener Schrift Traité des sinus des quarts de cercle (Abhandlung über den Sinus des Viertelkreises). Er sagt, er habe darin ein Licht gesehen, das der Autor nicht bemerkt habe. Es handelt sich um folgendes (in moderner Terminologie geschrieben, siehe Abbildung):
Um das statische Moment

des Viertelkreisbogens bezüglich der x-Achse zu bestimmen[Anm. 3], schließt Pascal aus der Ähnlichkeit der Dreiecke mit den Seiten

und

dass ihr Seitenverhältnis gleich ist

und somit

so dass

gilt. Leibniz bemerkte nun – und dies war das „Licht“, das er sah –, dass dieses Verfahren nicht auf den Kreis beschränkt ist, sondern allgemein für jede (glatte) Kurve gilt, sofern der Kreisradius a durch die Länge der Kurvennormalen (die reziproke Krümmung, der Radius des Krümmungskreises) ersetzt wird. Das infinitesimale Dreieck
ist das charakteristische Dreieck . Es ist bemerkenswert, dass die spätere Leibniz'sche Symbolik der Differentialrechnung (dx, dy, ds) gerade dem Standpunkt dieser „verbesserten Indivisibilienvorstellung“ entspricht.
Ähnlichkeit
Alle Dreiecke aus einem Abschnitt  der Tangente zusammen mit den zur jeweiligen x- und y-Achse parallelen Stücken
und
bilden mit dem Dreieck aus Krümmungskreisradius a, Subnormaler
der Tangente zusammen mit den zur jeweiligen x- und y-Achse parallelen Stücken
und
bilden mit dem Dreieck aus Krümmungskreisradius a, Subnormaler  und Ordinate y ähnliche Dreiecke und behalten deren Verhältnisse
entsprechend der Steigung der Tangente an den Krümmungskreis in diesem Punkt
auch bei, wenn der Grenzwertübergang gemacht wird. Das Verhältnis von
ist ja genau die Steigung von .
Deshalb kann man für jeden Krümmungskreis an einem Punkt der Kurve dessen
(charakteristische) Proportionen im Koordinatensystem auf die Differentiale dort
übertragen, insbesondere wenn sie als infinitesimale Größen aufgefasst
werden.
und Ordinate y ähnliche Dreiecke und behalten deren Verhältnisse
entsprechend der Steigung der Tangente an den Krümmungskreis in diesem Punkt
auch bei, wenn der Grenzwertübergang gemacht wird. Das Verhältnis von
ist ja genau die Steigung von .
Deshalb kann man für jeden Krümmungskreis an einem Punkt der Kurve dessen
(charakteristische) Proportionen im Koordinatensystem auf die Differentiale dort
übertragen, insbesondere wenn sie als infinitesimale Größen aufgefasst
werden.
Nova methodus 1684

Neue Methode der Maxima, Minima sowie der Tangenten, die sich weder an gebrochenen, noch an irrationalen Größen stößt, und eine eigentümliche darauf bezügliche Rechnungsart. (Leibniz (G. G. L.), Acta eruditorum 1684)
Leibniz erläutert hier sehr kurz auf vier Seiten seine Methode. Er wählt ein beliebiges unabhängiges festes Differential (hier dx, s. Abb. r. o.) und gibt die Rechenregeln, wie unten, für die Differentiale an, beschreibt, wie man sie bildet.
Danach gibt er die Kettenregel an:
-
- „So kommt es, daß man zu jeder vorgelegten Gleichung ihre Differentialgleichung aufschreiben kann. Dies geschieht, indem man für jedes Glied (d.h. jeden Bestandteil, der durch bloße Addition oder Subtraktion zur Herstellung der Gleichung beiträgt) einfach das Differential des Gliedes einsetzt, für eine andere Größe jedoch (die nicht selbst ein Glied ist, sondern zur Bildung eines Gliedes beiträgt) ihr Differential anwendet, um das Differential des Gliedes selbst zu bilden, und zwar nicht ohne weiteres, sondern nach dem oben vorgeschriebenen Algorithmus.“
Das ist aus heutiger Sicht ungewohnt, weil er unabhängige und abhängige Differentiale gleich und einzeln, und nicht wie abschließend benötigt, den Differentialquotienten aus abhängiger und unabhängiger Größe betrachtet. Andersherum, wenn er eine Lösung angibt, ist die Bildung des Differentialquotienten möglich. Er behandelt die gesamte Bandbreite der rationalen Funktionen. Es folgen ein formales kompliziertes Beispiel, ein dioptrisches der Lichtbrechung (Minimum)[Anm. 5], ein leicht lösbares geometrisches, mit verwickelten Abstandsverhältnissen[Anm. 6], und eines, das den Logarithmus behandelt.
Weitere Zusammenhänge werden wissenschaftlich historisch bei ihm aus dem Zusammenhang mit früheren und späteren Arbeiten zu dem Thema betrachtet, die teils nur handschriftlich oder in Briefen und nicht veröffentlicht vorliegen. In Nova methodus 1684 steht zum Beispiel nicht, dass für das unabhängige dx gilt dx = const. und ddx=0. In weiteren Beiträgen behandelt er das Thema bis zu „Wurzeln“ und Quadraturen von unendlichen Reihen.
Das Verhältnis von Unendlichklein und bekanntes Differential (= Größe) beschreibt Leibniz:
-
- „Es ist auch klar, daß unsere Methode die transzendenten Linien beherrscht, die sich nicht auf die algebraische Rechnung zurückführen lassen oder von keinem bestimmten Grade sind, und zwar gilt das ganz allgemein, ohne besondere, nicht immer zutreffende Voraussetzungen. Man muß nur ein für allemal festhalten, daß eine Tangente zu finden so viel ist wie eine Gerade zeichnen, die zwei Kurvenpunkte mit unendlich kleiner Entfernung verbindet, oder eine verlängerte Seite des unendlicheckigen Polygons, welches für uns mit der Kurve gleichbedeutend ist. Jene unendlich kleine Entfernung läßt sich aber immer durch irgendein bekanntes Differential, wie dv oder durch eine Beziehung zu demselben ausdrücken, d.h. durch eine gewisse bekannte Tangente.“
Für die transzendente Linie wird die Zykloide als Nachweis herangezogen.
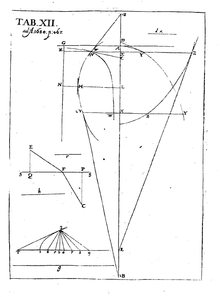
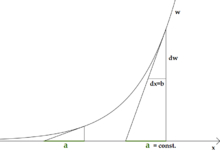
Als Anhang erklärt er 1684 die Lösung eines Problems, das Florimond de Beaune Descartes stellte, und das er nicht löste. Das Problem sieht vor, dass eine Funktion (w, der Linie WW in Tafel XII) gefunden wird, deren Tangente (WC) die x-Achse immer so schneidet, dass der Abschnitt zwischen Schnittpunkt der Tangente mit der x Achse und dessen Abstand zur zugehörigen Abszisse x, dort wählt er dx immer gleich b, konstant, er nennt es hier a, ist. Diese Proportionalität vergleicht er mit der arithmetischen Reihe und der geometrischen und erhält als Abszisse die Logarithmen und als Ordinate die Numeri. „Es werden also die Ordinaten w“ (Wertzunahme) „den dw“ (Steigungszunahme)", ihren Inkrementen oder Differenzen, proportional, ..." Er gibt die Logarithmusfunktion als Lösung an: „… wenn die w die Numeri sind, so sind die x die Logarithmen.“: w=a/b dw, oder w dx = a dw. Dies erfüllt

oder

Cauchys Differentialbegriff
In den 1980er Jahren fand in Deutschland eine Auseinandersetzung statt,
inwieweit die Grundlegung der Analysis bei Cauchy logisch einwandfrei ist.
Detlef Laugwitz versucht mit Hilfe einer historischen Lesart Cauchys, den
Begriff unendlich kleiner Größen für seine  -Zahlen
fruchtbar zu machen, findet aber daraus resultierend bei Cauchy Unstimmigkeiten.
Detlef Spalt korrigiert den (ersten!) historischen Lesansatz der cauchyschen
Arbeiten und fordert die Verwendung von Begriffen aus Cauchys Zeit und nicht
heutigen Begriffen zum Nachweis seiner Sätze und kommt zu dem Ergebnis, dass
Cauchys Grundlegung der Analysis logisch einwandfrei ist, jedoch bleiben
weiterhin die Fragen nach der Behandlung unendlich kleiner Größen offen.
-Zahlen
fruchtbar zu machen, findet aber daraus resultierend bei Cauchy Unstimmigkeiten.
Detlef Spalt korrigiert den (ersten!) historischen Lesansatz der cauchyschen
Arbeiten und fordert die Verwendung von Begriffen aus Cauchys Zeit und nicht
heutigen Begriffen zum Nachweis seiner Sätze und kommt zu dem Ergebnis, dass
Cauchys Grundlegung der Analysis logisch einwandfrei ist, jedoch bleiben
weiterhin die Fragen nach der Behandlung unendlich kleiner Größen offen.
Die Differentiale bei Cauchy sind endlich und konstant
 (
endlich). Der Wert der Konstanten ist nicht näher bestimmt.
(
endlich). Der Wert der Konstanten ist nicht näher bestimmt.
ist bei Cauchy unendlich klein und veränderlich.
Die Beziehung zu
ist  ,
wobei
endlich und
,
wobei
endlich und  infinitesimal (unendlich klein) ist.
infinitesimal (unendlich klein) ist.
Ihr geometrisches Verhältnis ist als

bestimmt. Dieses Verhältnis unendlich kleiner Größen, oder genauer die Grenze geometrischer Differenzenverhältnisse abhängiger Zahlgrößen, einen Quotienten, kann Cauchy auf endliche Größen übertragen.
Differentiale sind endliche Zahlgrößen, deren geometrische Verhältnisse streng gleich den Grenzen der geometrischen Verhältnisse sind, welche aus den unendlich kleinen Zuwächsen der vorgelegten unabhängigen Veränderlichen oder der Veränderlichen der Funktionen gebildet sind. Cauchy hält es für wichtig Differentiale als endliche Zahlgrößen zu betrachten.
Der Rechner bedient sich der Unendlichkleinen als Vermittelnden, welche ihn zu der Kenntnis der Beziehung führen müssen, die zwischen den endlichen Zahlgrößen bestehen; und nach Cauchys Meinung dürfen die Unendlich kleinen in den Schlussgleichungen, wo ihre Anwesenheit sinnlos, zwecklos und nutzlos bliebe, nie zugelassen werden. Außerdem: Wenn man die Differentiale als beständig sehr kleine Zahlgrößen betrachtete, dann gäbe man dadurch den Vorteil auf, der darin besteht, dass man unter den Differentialen von mehreren Veränderlichen das eine als Einheit nehmen kann. Denn um eine klare Vorstellung einer beliebigen Zahlgröße auszubilden, ist es wichtig, sie auf die Einheit ihrer Gattung zu beziehen. Es ist also wichtig, unter den Differentialen eine Einheit auszuwählen.
Insbesondere fällt für Cauchy die Schwierigkeit weg, höhere Differentiale zu
definieren. Denn Cauchy setzt
nachdem er die Rechenregeln der Differentiale durch Übergang zu den
Grenzen erhalten hat. Und da das Differential einer Funktion der Veränderlichen
eine andere Funktion dieser Veränderlichen ist, kann er
mehrmals differenzieren und erhält in dieser Weise die Differentiale
verschiedener Ordnungen.



- …
Anmerkungen
- ↑
Wenn man durch uv dividiert, wird die Symmetrie
plus zu minus bei der Division deutlicher:
- ↑
Wenn man durch
 dividiert, wird die Symmetrie minus zu plus bei der Multiplikation deutlicher:
dividiert, wird die Symmetrie minus zu plus bei der Multiplikation deutlicher:
- ↑
Bei konstanter Dichte deckt sich die Teilmasse
 mit dem Bogen
an dieser Stelle und
mit dem Bogen
an dieser Stelle und  entsprechend.
entsprechend. - ↑
 ist die Grenze für die Unabhängige s, a die entsprechend
umgerechnete für den „Parameter“ x. Man sieht auch anschaulich in der
Abbildung, dass man mit dem Viertelbogen eine Radiuslänge auf der
x-Achse durchläuft und umgekehrt.
ist die Grenze für die Unabhängige s, a die entsprechend
umgerechnete für den „Parameter“ x. Man sieht auch anschaulich in der
Abbildung, dass man mit dem Viertelbogen eine Radiuslänge auf der
x-Achse durchläuft und umgekehrt. - ↑ Grafik Tafel XII, links Mitte
- ↑ Grafik Tafel XII unten links


Siehe auch
Literatur
- Gottfried Leibniz, Sir Isaac Newton: Über die Analysis des Unendlichen – Abhandlung über die Quadratur der Kurven. Ostwalds Klassiker der exakten Wissenschaften, Band 162, Verlag Harri Deutsch, ISBN 3-8171-3162-3
- Oskar Becker: Grundlagen der Mathematik. Suhrkamp Verlag, ISBN 3-518-07714-7
- Detlef Spalt: Die Vernunft im Cauchy-Mythos. Verlag Harri Deutsch, ISBN 3-8171-1480-X (Spalt problematisiert die Übernahme moderner Begriffe auf frühere Analysis, stellt fest, dass Cauchys Aufbau der Analysis logisch einwandfrei ist, thematisiert benachbarte Begriffe und lässt Cauchy virtuelle Diskussionen mit wesentlich jüngeren Mathematikern führen über deren begriffliche Genauigkeit, z.B. Abel etc.)
- K. Popp, E. Stein (Hrsg.): Gottfried Wilhelm Leibniz, Philosoph, Mathematiker, Physiker, Techniker. Schlütersche GmbH & Co. KG, Verlag und Druckerei, Hannover 2000, ISBN 3-87706-609-7
- Bos, Henk, Differentials, Higher-Order Differentials and the Derivative in the Leibnizian Calculus, Archive for History of Exact Sciences 14, 1974, 1–90. Heftig diskutierte Veröffentlichung aus den 1970ern, um Kontinuum und Unendlichkeit.
- Courant Vorlesungen über Differential- und Integralrechnung, Springer, 1971
- Joos/Kaluza Höhere Mathematik für den Praktiker in älteren Auflagen so z.B. 1942, Johann Ambriosius Barth.
- Duden Rechnen und Mathematik, Dudenverlag 1989


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.10. 2021