Steifes Anfangswertproblem
Ein steifes Anfangswertproblem ist in der Numerik gewöhnlicher Differentialgleichungen ein Anfangswertproblem

bei dem explizite Einschrittverfahren
oder Mehrschrittverfahren
wegen ihres beschränkten Stabilitätsgebiets
erhebliche Schwierigkeiten haben. Dies ist dann der Fall, wenn die Konstante
 in der Lipschitzbedingung (vgl. Satz
von Picard-Lindelöf)
in der Lipschitzbedingung (vgl. Satz
von Picard-Lindelöf)

große Werte  annimmt, die Lösung
annimmt, die Lösung  aber recht glatt verläuft. In diesem Fall könnten numerische Verfahren diese
Lösung mit relativ großen Schrittweiten genau approximieren, explizite Verfahren
werden aber wegen des beschränkten Stabilitätsgebiets gezwungen, kleine
Schrittweiten zu verwenden. Typischerweise treten steife Anfangswertprobleme bei
der numerischen Approximation von parabolischen
partiellen Differentialgleichungen auf nach erfolgter Diskretisierung im
Ortsbereich. Ein Beispiel ist das Crank-Nicolson-Verfahren,
bei dem im Ort eine Finite-Differenzen-Methode
und in Zeitrichtung die implizite Trapez-Methode
eingesetzt wird.
aber recht glatt verläuft. In diesem Fall könnten numerische Verfahren diese
Lösung mit relativ großen Schrittweiten genau approximieren, explizite Verfahren
werden aber wegen des beschränkten Stabilitätsgebiets gezwungen, kleine
Schrittweiten zu verwenden. Typischerweise treten steife Anfangswertprobleme bei
der numerischen Approximation von parabolischen
partiellen Differentialgleichungen auf nach erfolgter Diskretisierung im
Ortsbereich. Ein Beispiel ist das Crank-Nicolson-Verfahren,
bei dem im Ort eine Finite-Differenzen-Methode
und in Zeitrichtung die implizite Trapez-Methode
eingesetzt wird.
Beispiel
Die Problematik wird mit dem expliziten
und impliziten
Eulerverfahren und Schrittweite  anhand des linearen Anfangswertproblems
anhand des linearen Anfangswertproblems

mit  erläutert. Die exakte Lösung ist
erläutert. Die exakte Lösung ist  und für große
und für große  ist die Lösung beinahe konstant, also sehr glatt.
ist die Lösung beinahe konstant, also sehr glatt.
- Das explizite
Eulerverfahren berechnet mit
 die Näherungen
die Näherungen
 Diese liefern aber nur dann brauchbare Werte, wenn der Betrag des Vorfaktors
von
Diese liefern aber nur dann brauchbare Werte, wenn der Betrag des Vorfaktors
von  kleiner eins ist,
kleiner eins ist,  ,
hier also für
,
hier also für  .
Für
.
Für  liegt dagegen das Produkt
liegt dagegen das Produkt  außerhalb des Stabilitätsgebiets,
das bei
außerhalb des Stabilitätsgebiets,
das bei  endet, siehe Eulersches
Polygonzugverfahren. Für solche, zu großen Schrittweiten
wachsen die Lösungen unbegrenzt an, vgl. Grafik.
endet, siehe Eulersches
Polygonzugverfahren. Für solche, zu großen Schrittweiten
wachsen die Lösungen unbegrenzt an, vgl. Grafik.
- Das implizite
Eulerverfahren berechnet dagegen von
ausgehend die Näherungen
 Für jede positive Schrittweite
Für jede positive Schrittweite  ist hier der Vorfaktor von ,
der Bruch
ist hier der Vorfaktor von ,
der Bruch  ,
da
negativ ist. Denn das Stabilitätsgebiet
des impliziten
Eulerverfahrens umfasst die ganze linke komplexe Halbebene, das Verfahren
ist A-stabil.
,
da
negativ ist. Denn das Stabilitätsgebiet
des impliziten
Eulerverfahrens umfasst die ganze linke komplexe Halbebene, das Verfahren
ist A-stabil.
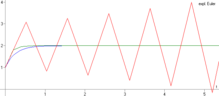
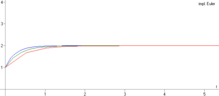
- Die beiden Diagramme zeigen jeweils die exakte Lösung in blau, eine
Näherungslösung mit kleiner Schrittweite
 in grün und die Näherungslösungen mit
in grün und die Näherungslösungen mit  in rot.
in rot.
Beim expliziten Eulerverfahren wachsen die roten Näherungen immer weiter an, während auch diese groben Näherungen beim impliziten Eulerverfahren in der Nähe der exakten Lösung bleiben.
Erweiterte Stabilitätsbegriffe
Für eine genauere Klassifikation numerischer Verfahren bei steifen Anfangswertproblemen wurden in der Literatur verschiedene Stabilitätsbegriffe eingeführt, die sich in der Regel an unterschiedlichen Testgleichungen orientieren. Dazu gehören die
- Gleichung von Dahlquist
 mit
mit  .
Ihre Lösungen
.
Ihre Lösungen  gehen alle gegen null für
gehen alle gegen null für  .
. - Prothero-Robinson-Gleichung
 mit
und einer glatten Funktion
mit
und einer glatten Funktion  .
Die Lösung dieser Gleichung ist
.
Die Lösung dieser Gleichung ist  .
Für sehr kleine Realteile
.
Für sehr kleine Realteile  nähern sich alle Lösungen sehr schnell der Funktion
an.
nähern sich alle Lösungen sehr schnell der Funktion
an. - Die nichtlineare dissipative Gleichung
 ,
bei der die rechte Seite
,
bei der die rechte Seite  eine einseitige Lipschitzbedingung erfüllt,
eine einseitige Lipschitzbedingung erfüllt,  Im Unterschied zur obigen Lipschitzbedingung sind bei der Konstanten
Im Unterschied zur obigen Lipschitzbedingung sind bei der Konstanten  auch negative Werte möglich. Eine Folge der einseitigen Lipschitzbedingung
ist, dass für die Differenz von zwei Lösungen
auch negative Werte möglich. Eine Folge der einseitigen Lipschitzbedingung
ist, dass für die Differenz von zwei Lösungen  der Differentialgleichung die Schranke
der Differentialgleichung die Schranke  gilt, und sich diese für
gilt, und sich diese für  und wachsendes
also immer weiter annähern.
und wachsendes
also immer weiter annähern.
Bei numerischen Verfahren ist es vorteilhaft, wenn sich die numerischen Approximationen bei Testgleichungen im Wesentlichen so wie die exakten Lösungen verhalten. Dementsprechend fordert der Begriff
- A-Stabilität,
dass Näherungslösungen bei der ersten Testgleichungen gegen Null gehen für
,
- B-Stabilität,
dass sich zwei Näherungslösungen der dritten Testgleichung mit
 nicht voneinander entfernen für .
nicht voneinander entfernen für .
Für implizite Runge-Kutta-Verfahren gibt es mit dem Begriff Algebraische Stabilität ein hinreichendes Kriterium für B-Stabilität.
Numerische Verfahren für steife Anfangswertprobleme
Für steife Anfangswertprobleme sind implizite Verfahren effizienter als explizite (das kann man quasi auch als Definition des Begriffs "steif" ansehen). Spezielle Klassen sind
- implizite Runge-Kutta-Verfahren
- Rosenbrock-Wanner-Verfahren
- BDF-Verfahren
Da bei impliziten Verfahren die Auflösung der nichtlinearen Gleichungssysteme einen hohen Aufwand erfordert, wurden auch linear-implizite Einschrittverfahren entwickelt wie die genannten Rosenbrock-Wanner-Verfahren (ROW-Methoden).


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 30.09. 2019